监控装置自动降级后列车无法定位问题的改进设计
2017-12-25弥耀翟
弥耀翟
(辽宁铁道职业技术学院,辽宁 锦州 121000)
监控装置自动降级后列车无法定位问题的改进设计
弥耀翟
(辽宁铁道职业技术学院,辽宁 锦州 121000)
从列车运行监控装置自动降级的原因入手,分析出列车紧急制动后,机车动轮产生滑行的原因是高摩合成闸瓦(闸片)的摩擦系数较大。提出在半自动区段机车运用工作的调整方案。依据《列车牵引计算规程》,得出列车制动距离与瞬时速度关系曲线,比照列车实际运行曲线,两者吻合。对监控装置控制模式进行改进设计。
监控装置;动轮滑行;自动降级;改进设计
列车运行监控装置(LKJ)简称监控装置,是我国研制的以保证列车运行安全为主要目的的列车速度监控装置。目前我国铁路既有线运营机车配备LKJ-2000型监控装置,该装置在实现列车速度安全控制的同时,采集记录与列车安全运行有关的机车运行状态信息,具有监控、记录、报警、自动停车、存取等功能,保证了铁路的运输生产安全,促进了机车运行管理的自动化。随着该装置的长期运用,出现了一些问题。例如:某列车运行至半自动闭塞区间,遇特殊情况,司机采用紧急制动停车,由于制动力过大造成机车动轮滑行,LKJ-2000型监控装置自动降级。司机操作监控装置重新进入监控状态后,无法定位,造成监控装置无法显示区间乘降所坐标,列车停车位置误差严重,旅客无法安全乘降的严重后果。
1 问题引入
半自动闭塞区段,区间不设通过信号机,列车凭出站信号机显示的允许列车运行的信号进入区间。两个车站之间必须保证只有一列车运行。不设通过信号机的乘降所线路坐标写入监控装置主机基础数据中,区间列车运行图解如图1。
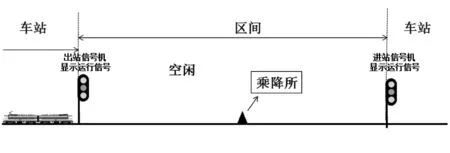
图1 半自动闭塞区间列车运行图解
列车运行至乘降所时,司机操纵列车停车,办理客运业务,旅客上下列车。为了保证列车停车位置准确,机务段工程师通过IC编写软件,写入相关信息。列车停车点作为监控装置停车关闭点。
当列车距离监控装置关闭点200 m以内,速度为0 km/h时,监控装置自动解锁,列车具备发车条件后,司机启动列车。
正常情况下,监控装置能够完成上述各项功能。但司机操纵列车紧急制动后,机车动轮滑行,监控装置进入降级模式,司机操作监控装置重新进入监控状态后,由于半自动区间不设通过信号机,司机无法进行车位调整。
2 问题分析
2.1 监控装置自动降级的原因
机车速度传感器安装在机车车轴上,将速度信息传送给监控装置主机,主机模拟列车速度信息在显示屏上显示。司机紧急制动停车,机车闸瓦抱紧车轮踏面,车轮不能转动,机车滑行,速度信号为0 km/h,此时监控装置主机接收速度信号不成线性变化,判定速度信号故障,监控装置自动降级[1]。
2.2 机车滑行的原因分析
《列车牵引计算规程》规定,我国各型闸瓦和闸片的实算摩擦系数φk,按下列各式计算:
中磷闸瓦
高磷闸瓦

低摩合成闸瓦
高摩合成闸瓦和闸片

(4)
式中:K为每块闸瓦的闸片压力,kW;v为列车运行速度,km/h;v0为制动初速度,km/h。
为了简化列车制动力的计算,不管列车中间同一种摩擦材料有多少种实算闸瓦压力值,都采用一个实算闸瓦压力的实算摩擦系数作为标准,即换算摩擦系数φh。我国目前各型车闸瓦压力的加权平均值为25 kN,因此K=25 kN分别带入式(1)—(3)得出φh的计算公式:
中磷闸瓦
(5)
高磷闸瓦
(6)
低摩合成闸瓦
(7)
高摩合成闸瓦换算摩擦系数按每块闸瓦的实算闸瓦压力K=20 kN计算
(8)
计算得出高摩合成闸瓦换算摩擦系数φh最大。通过调研,普通机型机车紧急制动后,只有采用高摩合成闸瓦的机车(DF11型内燃机车、SS9型电力机车)发生滑行现象,这进一步验证了上面的结论。
3 改进设计
3.1 机车运用调整
禁止采用高摩合成闸瓦的机车在半自动闭塞区段担当本务机车。
3.2 监控装置的改进设计
在制动计算中有:
Sz=Sk+Se
(9)
式中Sz为制动距离,Sk为制动空走距离,Se为有效制动距离。

(10)
式中:v0为制动初速,km/h;tk为制动空走时间,s。
(11)
式中:v0、vm分别为速度间隔的初速和末速,km/h;φh为换算摩擦系数;θh列车换算制动率;βc为常用制动系数,紧急制动时βc=1;ω0为列车单位基本阻力,N/kN;ij为制动地段的加算坡度千分数。
采用一次简化计算法,列车紧急制动停车,有效制动距离按下式计算[2]:
(12)
式中:v0、vm分别为速度间隔的初速和末速,km/h;φh为换算摩擦系数;θh列车换算制动率;βc为常用制动系数,紧急制动时βc=1;ω0为列车单位基本阻力,N/kN;ij为制动地段的加算坡度千分数。
由式(9)、(10)、(12)得[3]:
(13)
由式(13)得到制动末速vm与Sz函数关系式

根据式(14),已知初速度,做出列车紧急制动距离Sz与瞬时速度vm关系曲线(如图2)。
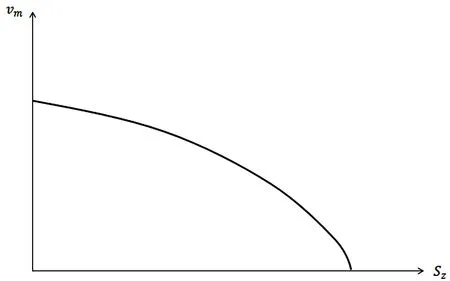
图2 列车瞬时速度曲线
列车瞬时速度曲线图(图2)与监控装置列车实际运行速度曲线显示方式一致,且计算结果与列车实际运行数据吻合。当司机采用紧急制动停车,若列车发生滑行现象,监控装置主机判断速度信号故障,监控装置自动降级时,改变此项设置,监控装置直接计算列车瞬时速度,模拟实际运行速度曲线,监控装置不降级,列车停车位置准确,彻底解决了半自动闭塞区间监控装置自动降级后列车无法定位的问题。
4 结语
采用高摩合成闸瓦的机车,紧急制动后,动轮容易产生滑行,因此在半自动闭塞区段,在条件允许的情况下,禁止使用采用高摩合成闸瓦的机车担当本务机车。列车紧急制动后计算瞬时速度曲线与列车实际运行速度曲线基本重合。因此,当监控装置在紧急制动工况下,监控装置接收动轮滑行信号后,直接切换成理论计算曲线替代实际运行曲线,避免监控装置自动降级。
[1]王颖卓,刘中田,王升辉.基于UML的列车运行监控装置功能建模分析[J].铁路计算机应用,2017,26(2):8-12.
[2]张中央.列车牵引计算[M].北京:中国铁道出版社,2012:111-119.
[3]潘寒川,廖爱华.《列车牵引计算》课程建设方法研究[J].科技资讯,2017(9):172-173.
ImprovingDesignoftheMonitoringDevicetoSolvetheProblemofFailtoLocatedafterTrainAutomaticallyRelegating
MI Yaodi
(Liaoning Railway Vocational and Technical College,Jinzhou 121000,China)
In this paper, from the reasons of train running monitoring device automatically relegating, it figures out that the cause of the locomotive traction wheel slide after the emergency braking is the big friction coefficient of high friction composition brake shoe (brake).It puts forward the adjustment of the locomotive operation work in semi-automatic section; According to "regulations of train traction calculation”, it figures out the chronological curve of train braking distance and speed , according to the train operation curve, the two are same. The design improvements of monitoring device control mode are put forward.
monitoring device; traction wheel slide; automatic relegation; design improvements
2017 - 06- 13
弥耀翟(1983—),男,辽宁新民人,辽宁铁道职业技术学院铁道机车系讲师,研究方向为铁道机车运用、列车牵引计算。
U260.1
A
1008-6811(2017)03-0007-03
赵 伟]
