果园变量喷雾技术研究现状与前景分析
2017-12-20周良富薛新宇周立新丁素明张学进
周良富,薛新宇,周立新,张 玲,丁素明,常 春,张学进,陈 晨
果园变量喷雾技术研究现状与前景分析
周良富,薛新宇※,周立新,张 玲,丁素明,常 春,张学进,陈 晨
(农业部南京农业机械化研究所,农业部现代农业装备重点开放实验室,南京 210014)
果园变量喷雾是提高农药有效利用率、提升果品品质的重要手段之一,已经成为国内外学者研究的热点课题。为明确果园变量喷雾技术与装备已处的研究阶段、所面临的挑战和未来发展的方向,该文从果园变量喷雾技术中冠层结构探测与重构、施药智能决策和变量喷雾执行系统3个主要环节,重点概述了冠层结构探测的主要技术手段及其优缺点,认为机器视觉技术、超声波传感技术、LIDAR(light detection and ranging)探测技术及其相互之间的组合传感技术是未来最主要发展的冠层结构探测技术;综述了当前所采用的基于果园面积GA(ground area)模型、基于冠层高度的LWH(leaf wall height)模型、基于树体面积的LWA(leaf wall area)模型和基于冠层体积的TRV(tree row volum)模型,在此基础上阐述了这4种模型之间的内在联系;在分析了对靶开关决策、离散型决策和连续型决策模型的现状和特点的基础上,提出基于模糊算法的施药量智能连续决策是未来重要的发展方向;从果园变量喷雾机所采用的传感技术、决策模型和所取得的技术指标方面论述了当前世界最典型的装备现状,进一步分析了施药量调控系统、风量调控系统和喷雾位置调控系统的研究现状,提出了风量快速调控系统和喷雾位置快速响应系统的发展方向,以期为果园变量喷雾技术与装备研究提供参考。
喷雾; 农药;机械化; 植保机械;果园喷雾机;变量喷雾;风送喷雾;LIDAR
0 引 言
风送喷雾是当前果园施药最常用的技术,将农药按照固定剂量喷施于冠层靶标,其施药作业参数不能根据果树冠层结构(如树冠体积、叶面积、树高、树龄和生产季节等)自动调节[1],进而造成沉积在单位叶片面积上的药液极不均匀,导致局部过量施药和局部防效不理想并存的现象,严重影响果品品质。因此开展果园变量施药技术研究是果园可持续发展的必然技术选择。
果园变量喷雾技术最早开始于上世纪70年代,在计算机技术和电子技术发展推动下,随着各类传感检测元器件的成熟、计算机存贮和处理数据的加快,果园变量喷雾技术已经成为当前广大学者研究的热点方向。本文从果树冠层结构探测方法、喷雾量计算与决策模型及变量喷雾系统及机具3个方面评述当前的研究进展,这3方面也是果园变量喷雾最主要的3个环节,在此基础上提出果园变量喷雾技术的发展前景,以期为后续研究提供技术参考。
1 果园变量喷雾机概述及现状
果园喷雾机主要包括冠层信息采集系统、喷雾量控制系统和变量喷雾系统3个子系统,如图1所示。其主要工作流程如下:采用非接触式的冠层探测手段获取果树冠层结构点云信息,利用适当的算法构建出果树冠层的3D结构模型;在大量试验研究的基础上构建出与冠层信息相适应的施药量计算与决策模型;变量喷雾系统根据决策模型反馈出的施药作业参数进行动态调节实现基于冠层特征的变量喷雾。

图1 变量喷雾机主要系统构成
当前已经有很多学者在已有的喷雾机基础上加装变量喷雾系统,如西班牙的Gil和Escolà分别在Hardi Arrow-F1000[2]和LE-600喷雾机[3]上模块化植入变量喷雾系统而成的喷雾机,如图2。

图2 模块化植入的变量喷雾机
还有如图3根据果树树形特点研制的新型风送变量喷雾机,国内何雄奎等利用红外探测技术[4]、结合静电喷雾技术研制了果园自动对靶静电喷雾机[5]。表1为部分国家变量喷雾机在文献上报道的技术指标。后续章节将从变量喷雾机主要子系统的研究现状展开分析。
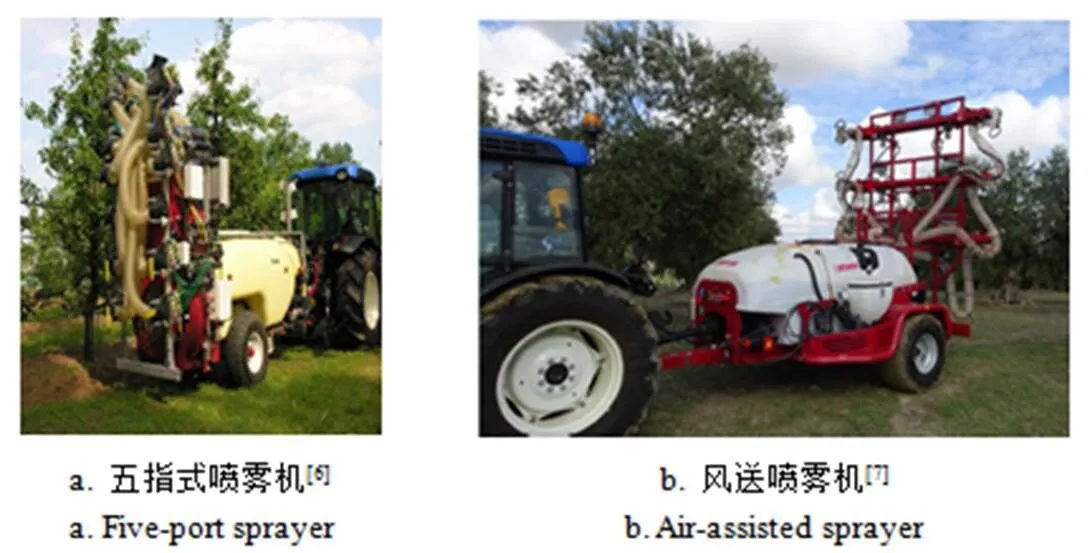
图3 新型果园变量喷雾机
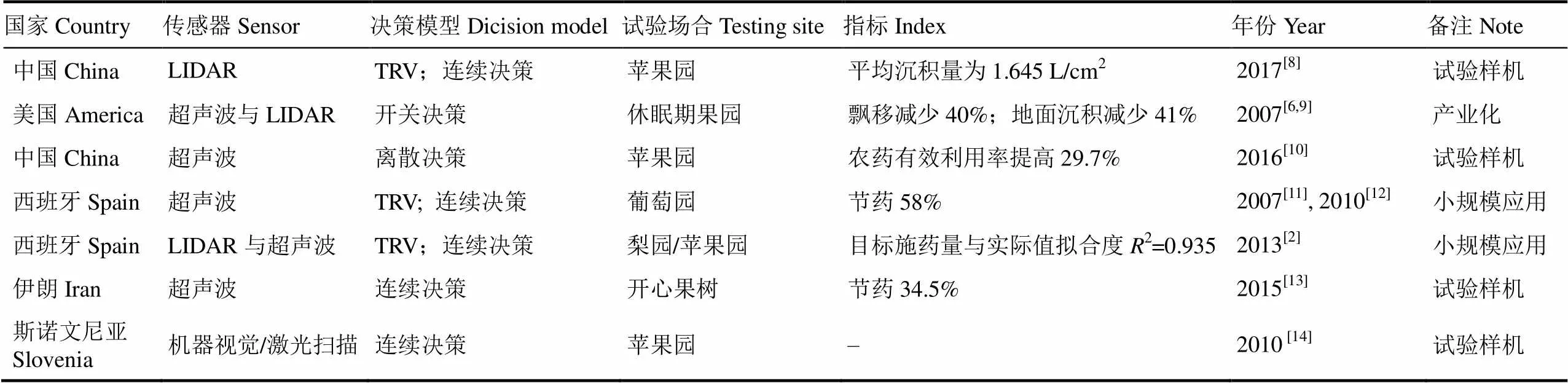
表1 部分国家果园变量喷雾机现状
2 果树冠层信息采集系统
果树冠层信息采集是变量喷雾最重要的环节之一,准确的冠层结构参数是喷雾参数控制与执行的数据基础。目前果树冠层结构的体积和面积参数主要根据人工测量树高、树宽和样本叶片面积来计算,这种破坏性的采摘果树叶片样本的方法不仅效率低而且成本高。进入二十一世纪以来,各种非接触式的测量方法被应用到果树冠层测量中,包括微波雷达法、高清X射线扫描法、光学传感法、超声波传感法、立体视觉法和LIDAR传感法在果树冠层测量中都有应用[15-16],还有如采用无线电扫描法测量树冠结构[17]。表2主要列举了当前文献报道的各种冠层结构信息采集方法的原理及优缺点,其中微波雷达法、高清X射线扫描法、光学传感法在果树冠层测量中具有明显的缺点,因此在后续小节中主要介绍立体视觉法、超声波传感法和LIDAR传感法及其系统在果树冠层探测中的研究与应用现状。
2.1 超声波传感测量系统
超声波测量的原理与雷达和声呐测量原理类似,即时间差距法。超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。根据超声波在空气中的传播速度和计时器记录的测出发射和接收回波的时间差,计算出发射点距障碍物的距离[18]。超声波传感测量系统鲁棒性能好、价格低等优点,但由于超声波在传输过程中巨大的角度发散严重影响系统分辨率和测量精度,而且超声波传感测量系统在果园中的应用都需要一组超声波传感器配合使用[19]。
图4为典型的超声波测量果树冠层体积超声波测量系统,图中系统喷雾机一侧安装有3个超声波超感器,通过超声波传感器测出冠层外边界与每个传感器之间的距离,根据式(1)[20]计算每个区域的冠层宽度,然后分别按式(2)~(3)[21]计算区域冠层面积和树冠总 体积。


式中B为第个超声波传感器测量出的冠层厚度,m;为果树单行总长,m;W为超声波测量的切片长度,W与超声波测量频率和作业制度有关,m;为树高,m;
国内外学者基于超声波传感器研发了各种果树冠层探测系统,Roper于1988年就在已有喷雾机上不同的高度每侧安装5个超声波传感器,根据超声波测量出来的冠层结构信息来指导变量喷雾作业[33]。Giles等的试验显示超声波测量系统可以精确测量果树的高度及宽度,相对误差小于10%[34],而且选用精度高的超声波传感器最小可以测量出直径为3~4 cm的障碍物,但是超声波束在传输过程中扩散角度大,因此难以测出较小的冠层间隙,根据传感器与冠层间的距离不同,最小的检测间隙为35~120 cm[35]。翟长远等[36]选用946-A4V-2D-2C0-175E型超声波测距传感器开发了树型喷洒靶标外形轮廓探测试验平台,并以仿真树冠和花期樱桃树树冠进行对比试验,树冠体积探测精度分别为92.8%和90%。Zaman等[37]将树冠体积的超声波测量值与手工测量值进行统计分析,结果显示,在95%的置信水平下,超声波测量与手工测量的误差为–17.37%~28.71%。Jejcic等[38]在喷雾机上设计了一套超声波测量系统,通过反射超声波强度来评价冠层密度,同时验证了一组超声波可以有效地检测果树靶标位置。但在非标准果园应用时,由于局部树枝生长出主体冠层,此类树枝阻挡了大部分的声波造成冠层实际信息丢失。Escolà等[39]在实验室和田间条件下评估了超声波测量苹果树冠的性能,提出了多超声波并用时传感器的安装间距问题,即在标准树型下超声波传感器的安装间距≥0.6 m时,可以较准确测量出树冠的结构参数。Hong等[25]在模拟田间条件下,研究了环境参数与作业参数对超声波传感器测量精度的影响,研究结果显示低温室外条件、自然风速、粉尘及作业速度对测量精度影响不显著,而喷头与传感器安装的相对位置对测量精度影响显著,而且多传感器同时使用时需避免超声波束相互干扰。为避免传感器与喷头及其之间的相互干扰,Tomas等[40]通过在传感器上安装防水罩,按照一定顺序逐个开启传感器。文献[1]还总结了制约超声波测量树冠体积精度的影响因素及解决途径。
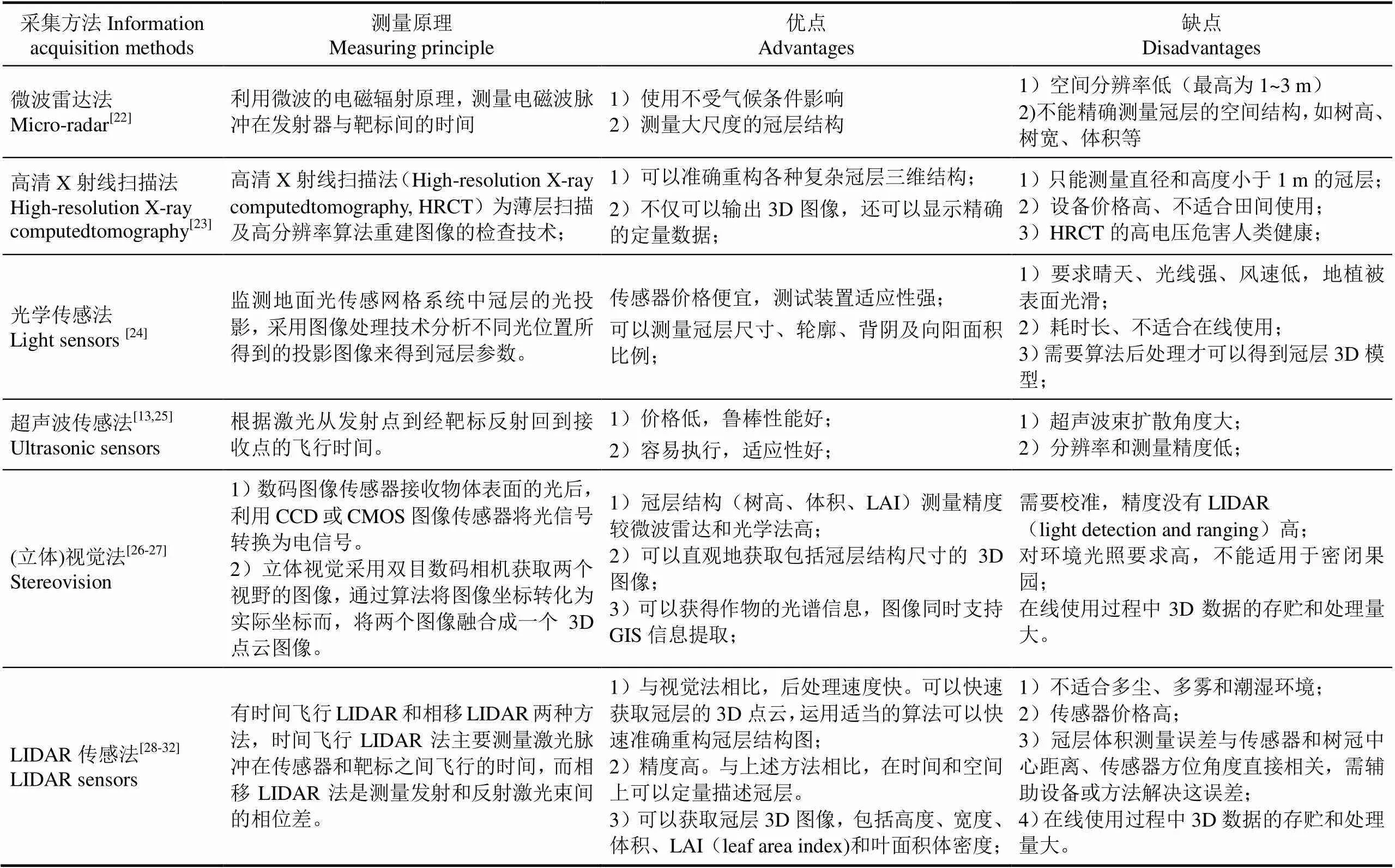
表2 树冠结构参数检测主要方法的原理及优缺点
2.2 机器视觉测量系统
机器视觉法测量树冠主要有数码摄影法和立体视觉法(双目视觉)2种。机器视觉测量系统中的图像采集器接收到靶标面的反射光后,通过CCD或CMOS视觉传感器将光学图像转换为电信号矩阵[41],而后通过模数转换以数字信号输入计算机。丁为民等[42]基于数码摄影法获取树冠图像,通过图像处理获得树冠图像面积特征,以椭球型几何结构(图5)来代替不同几何结构树冠。然后由CvBox2D结构体拟合出最接近轮廓的椭圆,得到长轴尺寸、短轴尺寸、以及椭圆率/,采用最小二乘法和五点参数标定法获得普适性树冠面积与体积相关关系模型,即得到与椭圆率的大小相关的树冠体积计算模型。通过对梨树以及桂花树样本的试验,可以发现预测树冠体积平均误差分别为13.73%和10.48%。

与数码摄影法通过2D图像预测树冠3D结构相比,双目视觉法增加了一个坐标系,实现树冠空间结构的3D定位,通过在线融合双目图像形成立体图像,其图像坐标与实际坐标按式(4)转换。

注:R/2为喷雾机中心与树干中心距离,m;H为树高,m;e为超声波传感器与喷雾机中心距离,m;x为传感器与冠层外表面距离,m;S为区域面积,m2;S1、S2、S3分别为每个超声波传感器测出的截面面积,m2;V为冠层体积,m3;V1、V2、V3分别为每个超声波传感器测出的冠层体积,m3;Wi为超声波单次测量的长度,m。

注:V为树冠体积,m3;a、b、c分别表示椭球的长半轴、中半轴和短半轴,m;x、y、z分别为空间坐标系。

式中=/,其中为单像素尺寸,mm;为相机焦距,mm其各参数空间示意如图6所示[43]。
蔡健荣等[44]利用双目立体视觉原理计算果树骨架特征点的空间坐标,并在空间坐标原点采用12棱柱构建各段树枝模块,通过仿射变换与其他模块组合成果树模型。Kise等[26]采用立体视觉法对果树的三维场景进行重构,研究结果显示树高的重构值与实测值最大误差为0.09 m,均方差仅为0.04 m。该研究表明立体视觉系统的高度测量精度可以达到厘米级,同时为果树长势监测提供一种有效的手段,还可以用于估测树冠尺寸及体积[45]。但立体视觉法存在需要校准、而且精度没有LIDAR传感器高、不能适用于低光照条件的密闭果园等问题。在线使用过程中3D数据的存贮和处理量大[46],目前大多采用图像信息在线提取后随即删除图像,该方法有效缓解了图像存贮难题,但对信息在线提取速度提出了更高的要求[47]。胡鹏程等[48]以精确的激光扫描三维模型为参照,采用豪斯多夫距离基于多视角立体视觉法植株三维重建模型进行精度评估,重建精度2大于0.95,但该研究主要关注的是植株表型参数(叶片长、宽、叶面积等)。但立体视觉在农业三维场景重构方面发挥着重要作用,Francisco等[27]采用立体视觉法建立三维地形图,该地形图可以有效地应用于农机装备导航和精细农业。随着信息技术和图像处理技术的不断发展,越来越多的学者运用计算机视觉法测量树冠结构参数。

注:图中P为坐标转化的目标点;g为双目相机镜头距离,mm;f为相机焦距,mm;∆l、∆r分别为2个图像中的水平位置;F为相机与靶标点距离,R=bf/(dw);w为像素尺寸,mm;d=∆l–∆r。
2.3 LIDAR传感测量系统
LIDAR激光扫描探测传感系统是目前最广泛使用的非接触式测量技术,采用成熟的激光-时间飞行原理及多重回波技术,通过激光扫描某一测量区域,并根据区域内各个点与扫描仪的相对位置,以极坐标形式返回测量物体的与扫描仪之间距离和相对角度[49]。LIDAR是一种新型的探测和重构果树冠层的方法,目前主要有时间飞行LIDAR和相移LIDAR两种方法,时间飞行LIDAR法主要测量激光脉冲在传感器和靶标之间飞行的时间,而相移LIDAR传感法是测量发射和反射激光束间的相位差。LIDAR传感法将树冠按图7分割成若干单元,利用Sopaset软件管理所采集的数据,在后处理软件中计算出冠层轮廓。根据测出的冠层距离按式(1)计算出每个单元的树冠厚度,分割的单元数量与传感器的角度分辨率和作业速度相关[8,21]。

注:h为传感器安装高度,m;x、y、z为坐标系;K为激光扫描次数;θ为扫描点角度,(°);(Xn,Yn)为扫描点坐标。
与超声波传感测量法相比,LIDAR传感测量法具有测量精度高、速度快等优点,采用适当的算法可以将3D点云数据重构出高精度的果树结构[50-51]。Ricardo等[49]设计了三维激光扫描系统,假设激光在冠层上的撞击数与叶面积成线性关系,通过冠层左右两侧激光扫描获得树冠3D点云后重构出冠层结构参数。Sanza等[52]在篱笆型苹果园、梨园和葡萄园验证了LIDAR测出的TRV与实测叶面积密度(leaf area density,LAD)间的相关性,相关性达到2=0.87,研究结果表明采用该系统可以有效地预测篱笆型果树的实际叶面积。Walklate等[53]将LIDAR传感器安装在拖拉机上,采用时间飞行法,计算出拦截激光的冠层位置与角度,快速重构出树冠结构(树高、树宽和平均冠层密度)。Escolà等[28]发现由于冠层内部枝叶的影响,采用LIDAR传感测量出的树冠体积大于实际体积。由于激光束不能穿透过叶面积指数高的树冠,大部分的激光在冠层表面就被反射回去,会引起“阴影效应”,这现象制约了树冠内部信息获取,这也是该系统最主要的弱点[29]。
2.4 组合传感系统
从以上的分析中可以看出,任何一种测量方法都有自己的优缺点,为获得高精度的树冠结构参数,很多文献将以上两种优势方法进行组合测量。Marco 等[30]将2个LIDAR传感器安装于同一垂直线上组成3D激光扫描系统,并在不同光照条件下,研究了不同扫描间距(扫描频率)的人工靶标体积的测量精度,研究结果认为扫描间距越小精度越高,而1/10冠层直径为扫描间距时的测量精度可以达到95%。该研究为变量喷雾机最大作业速度计算提供依据,当冠层直径为1 m、激光扫描频率为50 HZ时,喷雾机的最大速度为5 m/s。Nagham等[31]采用广角相机和2D激光扫描仪组合探测的方法,开展了组合探测的融合算法研究,该算法的预测树干位置精度达到96.64%,为无人驾驶农机具自动导航提供新方案。Llorens等[11]采用超声波和LIDAR组合方法测量果树冠层结构参数,结果显示超声波测量冠层整体结构更有优势,而LIDAR可以测量冠层的结构细节。研究结果认为超声波测出的叶面积指数与冠层体积间的拟合度2=0.51,2种方法测出的冠层体积拟合度2=0.52。Francisco等[32]基于LIDAR和热感相机融合法构建果树3D冠层结构,与航空航天遥感相比,该系统可以用于密闭果园,可以获取冠层温度分布和结构特点,但该系统的后处理时间长不利于在线使用。
由果树冠层探测方法的文献分析可知,LIDAR法获取的信息量和测量精度都具有较大的优势,是未来冠层结构探测研究的首选方法。但从测量尺度及测试成本方面考虑,其他测量方法依然有值得深入研究的必要。
3 施药量计算与决策模型
3.1 施药量计算模型
施药量计算是植保施药过程很重要的环节之一,合理的施药量是病虫害防治效果和环境效益有机统一。国内一直根据果园面积来计算单位面积的施药量,随着国家对果品质量及环境安全的重视,越来越多的果园生产者认识到变量施药的重要性。Byers等[54]于1971年提出了根据果树冠层结构参数来计算植保机械施药量的重要性,指出采用树体面积比采用果园面积来计算施药量更合理。Henk等[55]根据20多年的数据积累,总结出与果树生长阶段相关的果园施药量计算与飘移预测经验模型。但目前普遍采用的施药量计算模型包括基于果园面积(base on ground area, GA)的计算模型、基于冠层高度(base on leaf wall height, LWH)的计算模型、基于树体面积(base on leaf wall area, LWA)的计算模型和基于冠层体积(base on tree row volume, TRV)的计算模型4种。
3.1.1 基于果园面积的计算模型
基于果园面积的计算模型(GA)没有考虑冠层密度和叶面积,喷雾机按照设定的施药量对不同的参数的果树进行恒量施药,造成具有不同冠层体积的果树上单位面积叶片的施药量不均匀。该模型采用与喷杆喷雾机相似的方法,如式(5)[56]。


3.1.2 基于冠层体积的计算模型
1971年Byers[54]首次提出基于冠层体积的计算模型(TRV)概念,模型假设一行树由一个长方体冠层体积组成,同时给出防治果树病虫害的推荐施药量,试验结果显示该模型可以显著提高药液分布均匀性,模型不断发展为施药量计算的一种标准方法,2012年[57]欧盟在修订植保机械施药量计算标准时,主要引用了该模型中每万立方果树冠层所需施药量的概念。该模型单位树行长度上喷雾机的施药量根据图1按式(6)计算。

式中为单位树行长度上喷雾机的施药量,L;为喷雾机作业速度,km/h;i为每立方米冠层体积所需的施药量,L/m3;
针对TRV模型的应用,后续有很多学者根据果树冠层密度和生长期提出了不同的修正系数。如Boucher等[58]为减少农药飘移,根据果树冠层密度提出来施药量因子(spray volume factor,SVF)。Furness等[59]提出了TRV的单位冠层简化模型(uint canopy row,UCR),该模型不考虑作业面积及种植行距,以100 m3冠层体积为单位,提出每100 m3冠层体积的施药量为7.5~10 L,模型在澳大利亚和新西兰得到应用。
3.1.3 基于树体面积的计算模型
与GA模型认定的土地面积为施药区域相比,LWA模型认定的施药作业区域为与喷头相对的果树冠层面,如图8所示。该模型主要计算每公顷土地面积所具有的树体面积,主要影响因素有树高和种植行距。树体面积及其施药量计算模型分别为式(7)~(8)[60]。

式中LWA和GA分别为树体面积和土地面积,m2;LWA和GA分别为每公顷树体面积和土地面积所需的施药量,L/hm2。

图8 LWA和GA模型认定的施药区域关系[61]
模型适用于在标准果园双侧喷雾。果农根据该模型以每公顷树体面积所需的施药量为依据调整喷雾机作业参数。Walklate等[62]等在英国开展了LIDAR测量、风送喷雾在不同梨园的药液沉积试验,试验结果表明在低于GA模型施药量下,LWA模型计算的施药量是安全有效的。该模型也得到欧盟国家的植保机械厂商的认可,同时欧盟权威部门准备把该模型应用到农药企业,要求农药产品标签上给出建议的模型值[63]。
3.1.4 基于冠层高度的计算模型
在果树种植行距一致的标准果园中,可以将LWA模型转换为冠层高度模型(LWH),而冠层高度是很容易测量的一个参数。如在非变量施药的情况下,只需将标准行距值代入式(8)就可得到LWH模型[57]。但该模型受限于没有考虑修剪农艺、冠层叶面积指数等变化而没有得到广泛推广。
3.2 决策模型
3.2.1 对靶开关决策模型
对靶开关决策模型设定一个传感器输出阈值,通过独立控制各个电磁阀的开关实现对靶喷雾。主要适用于果树间具有较大间隙的果园,不能应用于机械化修剪而成的冠层较密的篱笆型果园。该模型主要根据喷雾机两侧的传感器探测出果树施药区是否有果树冠层,然后根据果树冠层的高度调整喷头的位置。目前主要有基于超声波和基于红外探测2种方法,Gil[12]介绍了一种基于超声波探测的距离值来控制开关喷头数量及位置的决策算法,Balsari等[35]通过预设冠层与喷头的距离值为0.8~3.0 m时,电磁阀开启喷头喷雾,当距离大于3 m时,喷头不开启。Doruchowski等[64]研制了可以同时控制16路喷雾开关的变量喷雾系统,在苹果园与梨园中的试验表明该系统可以减少16%~25%的农药使用量。许林云等[65]对比分析了超声波、红外和激光传感器探测果树靶标的性能,认为红外传感器受环境光影响较大,应用于果树冠层探测存在一定局限。但邹建军等[66]针对红外探测控制系统易受环境影响、工作不稳定、探测距离近的缺陷,研制了一种由集成电路构成的果园自动对靶喷雾机红外探测系统。结果明系统的探测距离为0~6.15 m,最小识别间距小于0.3 m,系统工作稳定、灵敏度高、体积小、有效克服自然光的干扰。由于对靶开关决策模型相对容易执行而得到广泛应用。
3.2.2 离散型决策模型
对靶开关决策模型只能决策喷头的开关,在喷头打开的情况下其施药量是不变化的,而离散型决策模型不仅可以根据冠层参数决策喷头是否打开,而且可以根据传感器探测到的距离在线决策施药量。与对靶开关决策模型相比,该模型可以更精确控制施药量,但模型的决策数据仅是离散的几个点。目前一般设置3个离散施药量,即1)距离很远,喷头全关;2)探测出的距离较远(即树冠薄),则施药量低;3)探测出的距离较近(即树冠厚),施药量大。Moltó等[67]将该决策模型运用到田间试验,结果显示该模型可以节约37%的农药。
3.2.3 连续型决策模型
连续型决策模型是通过比例电磁阀或PWM(pulse width modulation)电磁阀来控制喷雾的流量,电磁阀开启的时间是基于占空比,当占空比为0时电磁阀关闭,当占空比为100%时电磁阀完全开启,从而实现从0~100%流量的调节。由连续型决策模型生成斜坡信号,将信号传输给比例电磁阀实现喷雾机施药量的连续控制。Chen等[68]采用PWM电磁阀通过连续型决策模型来调节施药量,发现作业速度为3.2km/h时,67%的水敏纸样本的雾滴覆盖率超过15%。Escolà等[3]将连续决策模型应用到喷雾机上,根据冠层体积实时调节施药量,以追求单位叶片面积上的药液沉积量一致。发现常规施药中有71%情况属于过量施药,而变量施药中只有16%属于过量施药。Berk等[69]基于模糊算法的决策模型设计了模糊控制器,应用于试验台实现施药量0~100%的控制
3.2.4 通用型决策模型
变量喷雾中的施药量需要考虑与冠层结构的匹配性,Walklate等[61]推荐了一个喷雾机施药量选择的通用模型,试验证明该模型评价喷雾机农药有效利用率具有很强的适应性。该模型引用了LWA模型中的冠层高与行距比[70]和冠层拦截率与累计拦截率之比[71]2个概念。
模型原理如式(10)~(13),式中为单位树行长度上喷雾机的施药量,L;为药箱内液体浓度,%;为喷头总喷雾流量,L/min;为喷雾机作业速度,m/s;为单位叶片面积的施药量,L/min;为冠层厚度,m;为树高,m;为拦截率,与树宽和孔隙度积成正相关,计算式为式(11)[69];为孔隙度;为喷雾行数;

将式(11)代入式(10)得

其中为冠层拦截率与累计拦截率之比

由式(12)~(13)可知,要确保单位叶片面积的施药量一致,即根据树高、树宽和孔隙度(或叶面积指数)在线调节喷雾机的施药系数。通用型模型是一种最理想化的农药减施模型,可以最大限度提高农药有效利用率,是未来发展的重要方向之一。文献[69]显示该模型的农药使用量只有GA模型的43%~60%。英国学者基于不同的果树冠层结构,利用小型数据库开发了施药量决策系统(http://pjwrc.co.uk/DoseAdjustment.htm),该系统主要包括施药量调节模型和标准果树冠层结构数据库,图9为施药量决策系统的果树模型及施药量计算器。
目前已经在试验室和实际果园中开展了不同的决策模型的农药减施效果的研究,但没有查阅到在相同试验条件下开展不同模型的对比研究的文献,这会是后续研究关注的重点。
4 变量喷雾执行系统
喷雾量、气流速度和喷雾距离是影响果树风送喷雾沉积量的最重要的3个技术参数[72]。因此后面章节将主要介绍变量喷雾执行系统中的喷雾量、喷雾气流和喷雾位置调控系统。
4.1 喷雾量调控系统
目前最常见变量喷雾系统如图10所示,系统包括3个独立的子系统以控制不同高度树冠的喷雾,具有与常规喷雾系统相同的药箱、泵、过滤器和压力表等部件,具有变量喷雾和常量喷雾2个作业模式[73]。喷雾量调节主要有4种方法,1)压力调节。通过改变喷雾压力实现喷雾量的调节,该方法存在调节范围小、非线性[74]、压力变化导致雾滴谱变化,药液沉积不均匀等缺点。但压力调节法具有控制方便和成本低等优点,也有学者研究开发基于压力调节的非线性变量喷雾系统[75];2)喷口截面调节。美国SprayTarget 公司已经形成具有VariTarget 系列、VeriJet 系列和VeriFlow 系列变量喷头。该类喷头的喷口采用一种楔形结构,通过调整弹簧预紧力实现喷口开度随喷雾压力变化而变化,从而实现喷雾量的在线调节[76]。3)PWM调节。脉冲宽度调节PWM是通过调节占空比来实现喷雾量的调节,是目前应用最多的一种流量调节方法。魏新华等[77]设计了一种PWM间歇喷雾式变量喷施控制器,并在3WX-200型悬挂式喷杆喷雾机上试验,试验结果显示整个系统的施药量控制误差在±6%范围内[78]。Liu等[79]研制了PWM集成控制器控制不同的喷头以适应复杂的喷雾系统应用。蒋焕煜等[80]于卡尔曼滤波方法研究了占空比与喷雾流量关系模型,不同压力条件下模型的决定系数均在0.995以上。还有很多学者开展基于PWM的变量喷雾系统的雾化性能[81-82]试验,研究结果表明:喷雾量随着占空比增大而增大,而分布更不均匀;雾滴粒径随占空比增大逐渐减小,而雾滴速度随占空比增大而增大。4)直接注入式变浓度调节。通过在喷雾系统的外部能源(泵)和电磁阀直接注入不同浓度的药液以实际变浓度调节。蔡祥等[83]构建了一种基于电磁阀的喷嘴直接注入式农药喷洒系统,该研究主要设计了一种基于电磁原理的快速反应阀门,通过PWM方式准确改变农药注入量和药液喷洒浓度。胡开群[84]等结合CAN总线技术,设计了基于处方图的直接注入式变量喷雾机,对变量喷雾系统的喷洒均匀性和精准度进行了试验验证,结果显示直接注入式变量喷雾的总体变异系数低于10%。

图10 变量喷雾系统[3]
4.2 喷雾气流调控系统
在果树风送喷雾过程中,与冠层相匹配的气流(气流速度、风量、气流方向)可以保证良好施药效果,气流不足导致雾滴难以穿透冠层,而过大气流会致使雾滴难以沉积而大量飘移。Balsari等[85]的研究表明,当作业气流以5 m/s到达果树冠层时,其雾滴沉积率更高、分布更均匀。而目前果园风送喷雾中的气流道形式主要有环向出风式、塔式、柔性管多头式和独立圆盘式等,如图11。这风送装置都是根据果树种植的特定模式而设计的,一般通过调节风机转速来改变喷雾气流速度,高速运行的风机转速响应时间长,更重要的是其气流分布特性很难根据冠层结构变化来调整。目前学者主要关注气流分布特性与特定冠层的匹配性,如邱威等[86]研制了圆环双流道风机,其气流速度分布与纺锤形果树冠形轮廓相一致;丁天航等[87]针对单风道果园喷雾机两侧气流分布不对称、施药不均匀的现象,研制了双风机双风道系统。但是这些装置的气流速度及方向不能实现连续调节。Landers[88]在喷雾机出风口安装百叶窗结构,通过百叶窗改变出风口截面积以实现喷雾风量从0~100%调节,试验结果也显示该结构可以有效增加雾滴在冠层的沉积,为气流调控提供了一种新思路,但该类方法的系统执行灵敏度和可靠性都有待进一步提高。
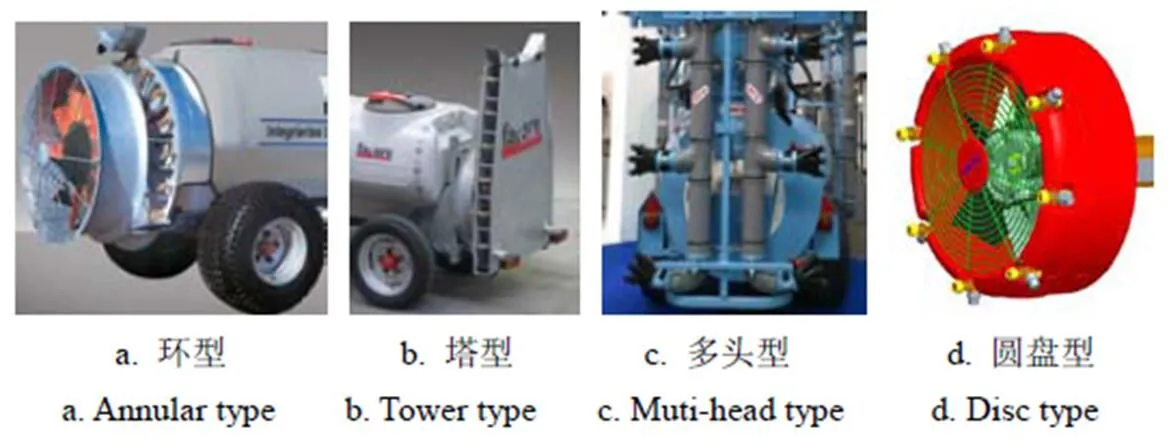
图11 不同型式的气流道
任丽春[89]等采用步进电机驱动,设计了一种风送喷雾风机转速检测与控制系统,为实现风送式喷雾机风机转速的精确控制,试验结果显示系统调速具有良好的动态响应。意大利favaro公司(http://www.favaro.eu/)设计OVS型喷雾机,其气流速度和方向均可以根据树冠结构动态调节,如图12所示。

图12 意大利favaro公司的喷雾机气流调节
4.3 喷雾位置调控系统
喷雾距离是影响喷雾效果的重要技术参数之一,根据果树冠层结构实时调节喷雾距离,实现喷雾与冠层的仿形是广大科技工作者关心的目标。Aljaz等[90]设计了风送喷雾几何位置在线调节装置(图13a)及其控制算法,该装置显著提高农药有效利用率,降低农药飘移。宋淑然等[91]设计了果园柔性对靶喷雾样机,试验了不同控制方式下的雾滴沉积率,结果显示最高雾滴沉积率达到88.4%;周良富等[92]针对篱笆型果树特点,参照澳大利亚多头圆盘式喷雾机(图13b)设计了一种仿行喷雾架,通过电动丝杆调节雾化器的上下左右运动,试验结果显示组合喷雾执行装置完成升降、伸缩和旋转的时间分别为51.3、50.5、26.5 s,由此可以看出该装置依然难以实现喷雾位置的在线调节。

注:DF为自由度,X和Y为坐标系
5 研究与发展方向
进入新世纪以来,随着民众对农产品安全认识提高和环境问题的重视,越来越多的学者投入环境友好型的变量施药技术研究。在满足病虫害防治需求的基础上,追求最小的施药量精准喷施于冠层靶标,最小的农药流失到环境中依然是未来果园变量施药技术研究的热点,研发具有精准、变量功能的果园喷雾机是未来喷雾机企业的重点方向。从上述文献分析可以看出通过冠层探测技术及变量喷雾决策系统,喷雾机可以实现根据树冠参数在线调整施药参数,但是设备复杂、维护与管理对人员要求高、价格昂贵等因素制约了变量喷雾系统在市场上的推广应用。因此,提高冠层探测、智能决策等技术及其田间应用依然值得我们关注。
5.1 高精度的冠层结构探测
1)与冠层探测系统相适应的果树种植农艺技术研究。很多学者发现冠层结构探测精度与冠层结构特征有密切关系,因此开展与探测系统和喷雾系统相适应的整枝、修剪、间枝等标准化的种植技术研究,形成具有一致的冠层形状、尺寸和叶面积指数,可以有效提高冠层结构探测系统的响应速度,确保变量喷雾机的作业效率。
2)组合探测及其融合算法研究。充分发挥表2中各种冠层探测方法的优点,开展如超声波、视觉及LIDAR传感的组合探测方法,提高探测精度。
3)冠层结构重构技术研究。任何一种冠层探测技术都不是直接获得冠层三维结构,而是需要采用合适的模型重构出结构细节。因此开展冠层重构技术及田间验证会是后续的研究重点。
5.2 施药智能决策模型
1)冠层结构参数与施药参数关系模型研究。由第三部分施药量计算及其在线决策模型的现状可知,不同的计算方法会得到不同药液沉积分布,造成不同的施药效果。构建准确的冠层结构参数与施药参数关系模型,并在相同的试验条件下开展不同模型的有效性评价值得学者关注。
2)基于模糊算法的在线决策系统研究。研究可以根据不同的输入参数(激光撞击冠层次数、叶面积、叶面积指数和喷雾机作业速度等),运用模糊算法快速输出施药参数响应值。
5.3 喷雾参数在线调整装置
1)喷头位置调节装置。喷雾距离是改善施药效果的重要指标之一,为保证每个喷头的喷雾距离相一致,开展与冠层外形相一致的喷雾位置调整装置研究是未来的研究方向之一。
2)风量快速调节装置。从文献分析可以看出,当前果园变量喷雾主要是基于冠层结构参数实时调整施药量。针对当前最常用的风送喷雾,而风量是关乎药液沉积与飘移的重要因素,其风量在线调节机构及其控制方法值得广大学者关注。
果园变量喷雾技术与装备研究已经开展了相当长的时间,研发了不同的冠层探测系统,构建了不同的施药决策模型及相应的执行装置,但变量喷雾装备依然处在样机阶段。未来将以模糊控制系统为代表的喷雾智能模型、激光雷达扫描等先进手段快速检测冠层、喷雾量与气流方向快速调整等技术环节为重点攻克目标,以模块化低成本植入现有喷雾机为工程应用目的。
[1] 邱白晶,闫润,马靖,等. 变量喷雾技术研究进展分析[J].农业机械学报,2015,46(12):59-72. Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12): 59-72. (in Chinese with English abstract)
[2] Gil E, Llorens J, Llop J, et al. Variable rate sprayer Part 2- Vineyard prototype: Design, implementation, and validation[J]. Computers and Electronics in Agriculture, 2013, 95(3): 136-150.
[3] Escolà A, Rosell P, Planas J, et al. Variable rate sprayer Part 1-orchard prototype: Design, implementation and validation[J]. Computers and Electronics in Agriculture, 2013. 95(3): 122-135.
[4] 邹建军,曾爱军,何雄奎,等. 果园自动对靶喷雾机红外探测控制系统的研制[J]. 农业工程学报,2007,23(1): 129-132. Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 129-132. (in Chinese with English abstract)
[5] 何雄奎,严苛荣,储金宇,等. 果园自动对靶静电喷雾机设计与试验研究[J]. 农业工程学报,2003,19(6):78-80. He Xiongkui, Yan Kerong, Chu Jinyu, et al. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(6): 78-80. (in Chinese with English abstract)
[6] Chen, Y, Ozkan H E, Zhu H, et al. Spray deposition inside tree canopies from a newly developed variable-rate air-assisted sprayer[J]. Trans. ASABE, 2013, 56(6): 1263-1272.
[7] Miranda A, Rodríguez A, Cuenca, et al. Improving plant protection product applications in traditional and intensive olive orchards through the development of new prototype air-assisted sprayers[J]. Crop Protection, 2017, 94(2): 44-58.
[8] 李龙龙,何雄奎,宋坚利,等. 基于变量喷雾的果园自动仿形喷雾机的设计与试验[J]. 农业工程学报,2017,33(1):70-76. Li Longlong, He Xiongkui, Song Jianli, et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 70-76. (in Chinese with English abstract)
[9] Brown D, Giles D, Oliver M, et al. 2008. Targeted spray technology to reduce pesticide in runoff from dormant orchards[J]. Crop Protection , 2008, 27(5): 545-552.
[10] 金鑫,董祥,杨学军,等. 3WGZ-500型喷雾机对靶喷雾系统设计与试验[J]. 农业机械学报,2016,47(7):21-27.Jin Xin, Dong Xiang, Yang Xuejun, et al. Design and experiment of target spraying system of 3WGZ-500 sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 21-27. (in Chinese with English abstract)
[11] Llorens J, Gil E, Llop J, et al. Variable rate dosing in precision viticulture: use of electronic devices to improve application efficiency[J]. Crop Protection, 2010, 29(7): 239-248.
[12] Gil E, Escolà A, Rosell J, et al. Variable rate application of plant protection products in vineyard using ultrasonic sensors[J]. Crop Protection, 2007, 26(8): 1287-1297.
[13] Hossein M, Saeid M, Barat G, et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture, 2015, 112(2): 149-160.
[14] Hocevar M, Sirok B, Jejcic V, et al. Design and testing of an automated system for targeted spraying in orchards[J]. Journal of Plant Diseases and Plant Protection (JPDP) 2010, 21(2): 71-79.
[15] Rosell J, Sanz R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities[J]. Computers and Electronics in Agriculture, 2012, 81(9): 124-141.
[16] Berk P, Hocevar M, Stajnko D, et al. Development of alternative plant protection product application techniques in orchards, based on measurement sensing systems: A review[J]. Computers and Electronics in Agriculture, 2016, 124(3): 273-288.
[17] Rajkishan A, Stavros G, Francisco J, et al. Estimation of fruit locations in orchard tree canopies using radio signal ranging and trilateration[J]. Computers and Electronics in Agriculture, 2016, 125(5): 160-172.
[18] 生利英. 超声波检测技术[M]. 化学工业出版社,2014年9月.
[19] Rovira F, Zhang Q, Reid J. Creation of three-dimensional crop maps based on aerial stereoimages[J]. Biosystems Engineering, 2005, 90(3): 251-259.
[20] Solanelles F, Escolà A, Planas S, et al. An electronic control system for pesticide application proportional to the canopy width of tree crops[J]. Biosyst. Eng. 2006, 95(4), 473-481.
[21] Llorens J, Gil E, Llop J, et al. Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods[J]. Sensors, 2011, 65(11): 2177-2194.
[22] Bongers F. Methods to assess tropical rain forest canopy structure: An overview[J]. Plant Ecology, 2001, 153(5): 263-277.
[23] Stuppy W, Maisano J, Colbert M, et al. Three-dimensional analysis of plant structure using high-resolution X-ray computed tomography[J]. Trends in Plant Science, 2003, 8(1): 2-6.
[24] Giuliani R, Magnanini E, Fragassa C, et al. Ground monitoring the light shadow windows of a tree canopy to yield canopy light interception and morphological traits[J]. Plant Cell Environment, 2000, 23(3): 783-796.
[25] Hong Y, Heping Z, Richard D, et al. Evaluation of ultrasonic sensor for variable-rate spray applications[J]. Computers and Electronics in Agriculture, 2011, 75(5): 36, 173-191.
[26] Kise M, Zhang Q. Development of a stereovision sensing system for 3D crop row structure mapping and tractor guidance[J]. Biosystems Engineering, 2008, 101(2): 191-198.
[27] Francisco R, Qin Zhang, John F, et al. Stereo vision three- dimensional terrain maps for precision agriculture[J]. Computers and Electronics in Agriculture, 2008, 60(5): 133-143.
[28] Escolà A, Camp F, Solanelles F, et al. Variable dose rate sprayer prototype for dose adjustment in tree crops according to canopy characteristics measured with ultrasonic and laser LIDAR sensors[C]//In: Proceedings ECPA-Sixth European Conference on Precision Agriculture, 2007: 563-571.
[29] Van D, Hoet D, Jonckheere W, et al. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure[J]. Agric. For. Meteorol, 2006, 141(10): 147-160.
[30] Marco B, Giovanni C, Renato V, et al. Evaluation of a LiDAR- based 3D-stereoscopic vision system for crop-monitoring applications[J]. Computers and Electronics in Agriculture, 2016, 124(3): 1-13.
[31] Nagham S, Tobias L, Cheryl M, et al. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion-Part A: Tree detection[J]. Computers and Electronics in Agriculture. 2015, 119(10): 254-266.
[32] Francisco J, Jaime S, Pablo A, et al. LiDAR and thermal images fusion for ground-based 3D characterisation of fruit trees[J]. biosysterm engineering, 2016, 151(11): 479-494.
[33] Roper, B. Grove sprayer: 4768713 [P]. 1988.
[34] Giles D, Delwiche M, Dodd R. Sprayer control by sensing orchard crop characteristics: Orchard architecture and spray liquid savings[J]. J. Agric. Eng. Res. 1989, 43(8): 271-289.
[35] Balsari P, Tamagnone M. An ultrasonic airblast sprayer[C] // EurAgEng Paper No. 98A-017. In: AgEng 98 International Conference, Oslo, Norway, 1998.
[36] 翟长远,赵春江,王秀,等. 树型喷洒靶标外形轮廓探测方法[J]. 农业工程学报,2011,26(12):173-177. Zhai Changyuan, Zhao Chunjiang, Wang Xiu, et al. Probing method of tree spray target profile[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 26(12): 173-177. (in Chinese with English abstract)
[37] Zaman Q U, Salyani M. Effects of foliage density and ground speed on ultrasonic measurement of citrus tree volume[J]. Applied Engineering in Agriculture, 2004, 20(2): 173-178.
[38] Jejcic V, Godesa T, Hocevar M, et al. Design and testing of an ultrasound system for targeted spraying in orchards[J]. J. Mech. Eng. 2011, 57(7): 587-598.
[39] Escolà A, Planas S, Rosell, et al. Performance of an ultrasonic ranging sensor in apple tree canopies[J]. Sensors, 2011, 11 (3): 2459-2477.
[40] Tomas P, Andrew J. Real time canopy density estimation using ultrasonic envelope signals in the orchard and vineyard[J]. Computers and Electronics in Agriculture, 2015, 115(5): 108-117.
[41] Chen Y, Chao K, Kim M. Machine vision technology for agricultural applications[J]. Computers and Electronics in Agriculture , 2002, 36(11): 173-191.
[42] 丁为民,赵思琪,赵三琴,等.基于机器视觉的果树树冠体积测量方法研究[J]. 农业机械学报,2016,(47)6:1-10,20. Ding Weimin, Zhao Siqi, Zhao Sanqin, et al. Measurement methods of fruit tree canopy volume based on machine vision[J].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(6): 1-10, 20. (in Chinese with English abstract)
[43] Kise M, Zhang Q, Rovir F. A Stereovision-based crop row detection method for tractor-automated guidance[J]. Biosystems Engineering, 2005, 90(4): 357-367.
[44] 蔡健荣,孙海波,李永平,等. 基于双目立体视觉的果树三维信息获取与重构[J]. 农业机械学报,2012,43(3): 152-156. Cai jianrong, Sun Haibo, Li Yongping, et al. Fruit trees 3-D information perception and reconstruction based on binocular stereo visionet[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(3): 152-156. (in Chinese with English abstract)
[45] Rovira F, Zhang Q, Reid J. Creation of three-dimensional crop maps based on aerial stereoimages[J]. Biosystems Engineering, 2005, 90(3): 251-259.
[46] Rovira F, Zhang Q, Reid J. Stereovision three dimensional terrain maps for precision agriculture[J]. Computers and Electronics in Agriculture, 2008, 60(2): 133-143
[47] Rovira F, Reid J, Zhang Q. Stereovision data processing with 3D density maps for agricultural vehicle[J]. Transactions of the ASABE, 2006, 49(4): 1213-1222.
[48] 胡鹏程,郭焱,李保国,等. 基于多视角立体视觉的植株三维重建与精度评估[J]. 农业工程学报,2015,31(11):209-214.Hu Pengcheng, Guo Yan, Li Baoguo, et al. Three-dimensional reconstruction and its precision evaluation of plant architecture based on multiple view stereo method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 209-214. (in Chinese with English abstract)
[49] Ricardo S, Jordi L, Alexandre E, et al. Innovative LIDAR 3D dynamic measurement system to estimate fruit-tree leaf area[J]. Sensors, 2011, 11(3): 5769-5791.
[50] Rosell J, Llorens J, Sanz R, et al. Obtaining the three- dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning[J]. Agricultural and Forest Meteorology, 2009, 149(12): 1505-1515.
[51] Rosell J R, Sanz R, Llorens J, et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: a comparison with conventional destructive measurements[J]. Biosystems Engineering , 2009, 102(2): 128-134
[52] Sanza R, Rosella J, Llorensb J, et al. Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D dynamic measurement system[J]. Agricultural and Forest Meteorology, 2013, 172(3): 153-162.
[53] Walklate P, Cross J, Richardson G, et al. Comparison of different spray volume deposition models using LIDAR measurements of apple orchards[J]. Biosyst. Eng, 2002, 82 (3): 253-267.
[54] Byers R, Hickey K, Hill C. Base gallonage per acre[J]. Virginia Fruit, 1971, 60(8): 19-23.
[55] Henk J, Holterman A, Jan C, et al. An empirical model based on phenological growth stage for predicting pesticide spray drift in pome fruit orchards[J]. Biosystems engineering, 2017, 154(9): 46-61.
[56] Weisser P, Koch H. Expression of dose rate with respect to orchard sprayer function[J]. Aspects Appl. Biol., 2002, 66(2): 353-358.
[57] Anonymous. Dose expression for plant protection products[J]. Bulletin OEPP/ EPPO Bulletin, 2005, 35 (3): 563-566.
[58] Boucher W. Getting the most out of your spray application[J]. Tree Fruits Tasmania, 1999, 15(2): 7-10.
[59] Furness G, Magarey P, Miller P, et al. Fruit tree and vine sprayer calibration based on canopy size and length of row: Unit canopy row method[J]. Crop Protection, 1998, 17(7): 639-644.
[60] Friessleben R, Rosslenbroich H, Elbert A. Dose expression in plant protection product field testing in high crops: Need for harmonization[J]. Pflanzenschutz Nachrichten Bayer, 2007, 60(8): 85-96.
[61] Walklate P, Cross J. Regulated dose adjustment of commercial orchard spraying products[J]. Crop Protection, 2013, 54(9): 65-73.
[62] Walklate P, Cross J. An examination of leaf-wall-area dose expression[J].Crop Protection , 2012, 35(10): 132-134.
[63] Koch H. How to achieve conformity with the dose expression and sprayer function in high crops[J]. Pflanzenschutz- Nachrichten Bayer , 2007, 60(11): 71-84.
[64] Doruchowski G, Jaeken P, Holownicki R. Target detection as a tool of selective spray application on trees and weeds in orchards[C]//In: SPIE Conference on Precision Agriculture and Biological Quality Boston. Proc. SPIE 3543, 1998, 290-301.
[65] 许林云,张昊天,张海锋,等. 果园喷雾机自动对靶喷雾控制系统研制与试验[J]. 农业工程学报,2014,30(22): 1-9. Xu Linyun, Zhang Haotian, Zhang Haifeng, et al. Development and experiment of automatic target spray control system used in orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(22): 1-9. (in Chinese with English abstract)
[66] 邹建军,曾爱军,何雄奎,等. 果园自动对靶喷雾机红外探测控制系统的研制[J]. 农业工程学报,2007,23(1): 129-132. Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 129-132 (in Chinese with English abstract)
[67] Moltó E, Martin B, Gutiérrez A. Pesticide loss reduction by automatic adaptation of spraying on globular trees[J]. J. Agric. Eng. Res. 2001, 78(10): 35-41.
[68] Chen Y, Zhu H, Ozkan H. Development of a variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures[J]. Trans of ASABE, 2012, 55(3): 773-781.
[69] Berk P, Stajnko D, Lakota M, et al. Real time fuzzy logic system for continuous control solenoid valve in the process of applying the plant protection product[J]. Agric. Eng. 2015, 15(1): 1-9.
[70] Walklate P, Richardson G, Cross J, et al. Relationship between orchard tree crop structure and performance characteristics of an axial fan sprayer[J]. Aspects Appl. Biol. 2000, 57(8): 285-292.
[71] Walklate P, Cross J, Pergher G. Support system for efficient dosage of orchard and vineyard spraying products[J]. Computers and Electronics in Agriculture, 2011, 75(12): 355-362.
[72] 吕晓兰,傅锡敏,吴萍,等. 喷雾技术参数对雾滴沉积分布影响试验[J]. 农业机械学报,2011,42(6):70-75. Lü Xiaolan, Fu Ximin, Wu Ping, et al. Influence of spray operating parameters on droplet deposition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 70-75. (in Chinese with English abstract)
[73] Solanellesl F, Escola A, Planas S, et al. An electronic control system for pesticide application proportional to the canopy width of tree crops[J]. Biosystems Engineering, 2006, 95(4): 473-481
[74] 邱白晶,李坤,沈成杰,等. 连续可变量喷雾系统响应特性试验[J]. 农业机械学报,2010,41(9):32-35. Qiu Baijing, Li Kun, Shen Chengjie, et al. Experiment on response characteristics of variable-rate continuous spraying system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(9): 32-35. (in Chinese with English abstract)
[75] Gonzalez R, Pawlowski A, Rodriguez C, et al. Design and implementation of an automatic pressure-control system for a mobile sprayer for greenhouse applications[J]. Spanish Journal of Agricultural research, 2012, 10(4): 939-949.
[76] Womac A, Bui Q D. Design and tests of a variable-flow fan nozzle[J]. Transactions of the ASAE, 2002, 45(2): 287-295.
[77] 魏新华,蒋杉,孙宏伟,等. PWM间歇喷雾式变量喷施控制器设计与测试[J]. 农业机械学报,2012,43(12):87-93,129. Wei Xinhua, Jiang Shan, Sun Hongwei, et al. Design and test of variable rate application controller of intermittent spray based on PWM[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(12): 87-93, 129. (in Chinese with English abstract)
[78] 魏新华,蒋杉,张进敏,等. 脉宽调制间歇喷雾变量喷施系统施药量控制[J]. 农业机械学报,2013,44(2):87-92,86. Wei Xinhua, Jiang Shan, Zhang Jinmin, et al. Application rate control characteristics of blended pulse variable rate application system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 87-92, 86. (in Chinese with English abstract)
[79] Liu H, Zhu H, Shen Y, et al. Development of digital flow control system for copy multi-channel variable-rate sprayers[J]. Transactions of the ASABE, 2014, 57(1): 273-281.
[80] 蒋焕煜,周鸣川,童俊华,等. 卡尔曼滤波的PWM 变量喷雾控制研究[J]. 农业机械学报,2014,45(10):60-65. Jiang Huanyu, Zhou Mingchuan, Tong Junhua, et al. Research of PWM variable spray control based on Kalman filter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 60-65. (in Chinese with English abstract)
[81] 刘伟,汪小旵,丁为民,等. 背负式喷雾器变量喷雾控制系统设计与特性分析[J]. 农业工程学报,2012,28(9): 16-21. Liu Wei, Wang Xiaochan, Ding Weimin, et al. Design and characteristics analysis of variable spraying control system for knapsack sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(9): 16-21. (in Chinese with English abstract)
[82] 邓巍,丁为民,何雄奎. PWM间歇式变量喷雾的雾化特性[J]. 农业机械学报,2009,40(1):74-78. Deng Wei, Ding Weimin, He Xiongkui. Spray characteristics of PWM-based intermittent pulse variable spray[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(1): 74-78. (in Chinese with English abstract)
[83] 蔡祥,Walgenbach M, Doerpmund M, 等. 基于电磁阀的喷嘴直接注入式农药喷洒系统[J]. 农业机械学报,2013,44(6):69-72. Cai Xiang, Walgenbach M, Doerpmund M, et al. Direct nozzle injection sprayer based on electromagnetic-force valve[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 69-72. (in Chinese with English abstract)
[84] 胡开群,周舟,祁力钧,等. 直注式变量喷雾机设计与喷雾性能试验[J]. 农业机械学报,2010,41(6):70-74,102.Hu Kaiqun, Zhou Zhou, Qi Lijun, et al. Spraying performance of the direct injection variable-rate sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(6): 70-74, 102. (in Chinese with English abstract)
[85] Balsari P, Marucco P, Oggero G, et al. Study of optimal air velocities for pesticide application in vineyard[C]//In: International Advances in Pesticide Application, 2008, 84: 417-423.
[86] 邱威,丁为民,傅锡敏,等. 果园喷雾机圆环双流道风机的设计与试验[J]. 农业工程学报,2012,28(12):13-17.Qiu Wei, Ding Weimin, Fu Ximin, et al. Design and experiment of ring double-channel fan for spraying machine in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(12): 13-17. (in Chinese with English abstract)
[87] 丁天航,曹曙明,薛新宇,等. 果园喷雾机单双风机风道气流场仿真与试验[J]. 农业工程学报,2016,32(14): 62-68. Ding Tianhang, Cao Shuming, Xue Xinyu, et al. Simulation and experiment on single-channel and double-channel airflow field of orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(14): 62-68. (in Chinese with English abstract)
[88] Landers A J. Effective Vineyard Spraying[R]. Cornell University Digital Print Services, Ithaca, USA. 2010
[89] 任丽春,汪小旵,李询. 风送式喷雾机风机转速的检测与控制[J]. 机械与电子. 2011,6:38-42.
[90] Aljaz O, Tone G, Marko H, et al. Real-time positioning algorithm for variable-geometry air-assisted orchard sprayer[J].Computers and Electronics in Agriculture, 2013, (98)8: 175-182.
[91] 宋淑然,陈建泽,洪添胜,等. 果园柔性对靶喷雾装置设计与试验[J]. 农业工程学报,2015,31(10):57-63.Song Shuran, Chen Jianze, Hong Tiansheng, et al. Design and experiment of orchard flexible targeted spray device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 57-63. (in Chinese with English abstract)
[92] 周良富,傅锡敏,丁为民,等. 组合圆盘式果园风送喷雾机设计与试验[J]. 农业工程学报,2015,31(10):64-71. Zhou Liangfu, Fu Ximin, Ding Weimin, et al. Design and experiment of combined disc air-assisted orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 64-71. (in Chinese with English abstract)
周良富,薛新宇,周立新,张 玲,丁素明,常 春,张学进,陈 晨.果园变量喷雾技术研究现状与前景分析[J]. 农业工程学报,2017,33(23):80-92. doi:10.11975/j.issn.1002-6819.2017.23.011 http://www.tcsae.org
Zhou Liangfu, Xue Xinyu, Zhou Lixin, Zhang Ling, Ding Suming, Chang Chun, Zhang Xuejin, Chen Chen.Research situation and progress analysis on orchard variable rate spraying technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 80-92. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.23.011 http://www.tcsae.org
Research situation and progress analysis on orchard variable rate spraying technology
Zhou Liangfu, Xue Xinyu※, Zhou Lixin, Zhang Ling, Ding Suming, Chang Chun, Zhang Xuejin, Chen Chen
(210014,)
Orchard variable rate spraying technology is beneficial to enhance the pesticide utilization efficiency and fruit quality, which has been a hot research topic for scholars all over the world. In order to clear the research situation, facing challenge and future progress, first of all, a summarization of the variable rate spraying system was introduced in this paper. There are 3 technique links including geometrical characterization of tree canopy, spray volume calculation and decision- making model, variable rate spraying executive system. For the typical variable-rate sprayers from USA, China, Spain, Iran and Slovenia, the sensors mounted, the property index, the decision-making model used and the qualification acquired were listed in the paper. The first part of this paper presented the foundations of the main systems and their applications in agriculture for the geometrical characterization of tree canopy, including systems based on ultrasound, digital photographic techniques, light sensors, high-resolution radar images, computer vision and LIDAR (light detection and ranging). Amongst these methods, LIDAR laser scanners, computer stereo vision systems, ultrasound and inter-combination are probably the most promising and complementary techniques for achieving 3D (three-dimensional) pictures and maps of plants and canopies. In the second part, a range of empirical models for calculating appropriate plant protection products (PPP) dose in the orchard all over the world were presented. Empirical models contain the equations with variables that influence the PPP application in the orchard. Among apple producers, there are 4 different empirical models in common use, tree-row-volume (TRV) model, ground area (GA) model, leaf wall area (LWA) model and leaf wall height (LWH) model. A potential direction for future development of decision-making model could be focused on using a fuzzy logic system, which is able to continuously control the PPP dosage in a range from 0 to 100%. The advantage of a fuzzy logic system over other systems lies in its capacity to dynamically connect various types of input variables, such as the amount of the laser beams reflected from the tree canopy, the leaf area size, the LAI (leaf area index) and the sprayer travel speed, which enables the fuzzy system to quickly output the response values. The situations of the spray volume regulator system, air volume regulator system and nozzle position regulator system were introduced at the third part. After several years, the technology has been improved much. However, attention must be paid to the fact that discrepancies in the original measurement systems were too large, owing to imprecise operation of various sensor components. Nevertheless it is necessary to underline that LIDAR technology is a strong tool for developing variable rate spraying techniques, and with it, tree canopy properties are sensed in real time. So it is no longer a major problem in the precise application to establish the detection system of tree canopy properties, but to control artificial intelligence actuation, which in the future will properly direct the air flow and the dosage rate of PPP per tree canopy in the orchard. And the quick response system of air volume regulator system and nozzle position regulator system should be paid more attention in the future.
spraying; pesticides; mechanization; lant protection machine;orchard sprayer; variable rate application; air- assisted sprayer; LIDAR
10.11975/j.issn.1002-6819.2017.23.011
S491
A
1002-6819(2017)-23-0080-13
2017-07-12
2017-11-08
国家自然科学基金资助项目(51605235);中国农业科学院基本科研业务费(研究所级)(S201707)
周良富,江西上饶人,助理研究员,博士,主要从事植保机械装备与仿真技术研究。Email:326310253@qq.com
薛新宇,江苏苏州人,研究员,博士,主要从事植保与环境工程技术研究。Email:xuexynj@qq.com
