基于速度自适应的拖拉机自动导航控制方法
2017-12-20刘进一杜岳峰朱忠祥毛恩荣宋正河
张 硕,刘进一,杜岳峰,朱忠祥※,毛恩荣,宋正河
基于速度自适应的拖拉机自动导航控制方法
张 硕1,刘进一2,杜岳峰1,朱忠祥1※,毛恩荣1,宋正河1
(1. 中国农业大学现代农业装备优化设计北京市重点实验室,北京 100083;2. 海南大学机电工程学院,海口 570228)
针对速度因素对拖拉机自动导航系统稳定性的影响,提出了基于横向位置偏差和航向角偏差的双目标联合滑模控制方法,在建立两轮拖拉机-路径动力学模型和直线路径跟踪偏差模型的基础上,应用Matlab/Simulink进行整体系统仿真,验证了控制方法的可靠性;以雷沃TG1254拖拉机为载体搭建了自动导航控制系统田间试验平台,分别在定速和变速条件下,进行了拖拉机直线路径跟踪控制的田间试验;分析了不同速度条件下的动态跟踪控制效果,验证了设计的自动导航控制系统的稳定性和控制精度。试验结果表明:在拖拉机田间作业常见的定速直线行驶工况下,采用基于速度自适应的双目标联合滑模控制方法,拖拉机直线路径跟踪控制的横向位置偏差最大值为10.60 cm,平均绝对偏差在3.50 cm以内;航向角偏差最大值为3.87°,平均绝对偏差在1.70°以内;在进入稳态以后,前轮转向角最大摆动幅度为3°,摆动标准差为0.80°。结论表明,该文提出的基于速度自适应的拖拉机自动导航控制系统,能基本实现不同速度下的直线路径自动跟踪控制。
机械化;控制系统;导航;拖拉机自动导航;拖拉机-路径动力学模型;滑模控制;速度自适应;仿真分析
0 引 言
作为精准农业的一个重要组成部分,拖拉机自动导航技术的不断发展与应用,有效提高了拖拉机田间作业速度,改善了作业质量,为推动精准农业的发展起到了关键作用[1-3]。在作业过程中,受作业环境复杂、外界干扰较多等影响,作业速度的提高使拖拉机-田间路径系统的非线性、迟滞、不稳定等特性变得更加明显,对拖拉机自动导航控制提出了更高的要求[4-7]。
近年来,国外相关研究机构在拖拉机导航控制方面的研究日趋成熟。Astolfi等采用Lyapunov方法对拖拉机直线和圆弧路径跟踪进行了建模并提出了相应的控制策略[8]。Kayacan等基于简化的拖拉机路径跟踪模型,设计了一种参数在线学习的模糊控制器,并进行了试验验证[9]。约翰迪尔、凯斯纽荷兰等拖拉机生产商已经开始配备相关产品[10-13],但是控制方法比较简单,对非线性特点的适应性不够。国内的很多学者也针对农机导航的非线性控制问题展开了大量的研究,其中滑模变结构控制相关的研究最为广泛。牛雪梅等在建立温室喷药移动机器人
运动学模型的基础上,通过引入负的加权值来优化趋近律算法,设计了一种基于指数趋近律的滑模变结构控制方法[14]。焦俊等结合模糊理论和滑模控制,提出了一种基于模糊逻辑的自适应滑模控制,提高了对外部参数扰动的鲁棒性[15]。李琳辉等基于视觉预瞄距离建立了车辆横向控制系统模型,并提出了模糊和滑模相结合的车辆横向控制策略,实现对参考路径的跟踪[16]。赵翾等建立偏差模型作为状态方程,设计了基于将指数趋近律的滑模控制器,并在硬件在环仿真中进行了验证[17]。
在现有研究中,考虑到农业机械普遍低速作业的特点,大多数都将速度视为定值,采用PID、模糊控制、最优控制等实现路径跟踪控制。鲜有探究不同速度下的路径跟踪效果,以及速度变化对路径跟踪的非线性自适应鲁棒控制[18-20]。因此,本文针对拖拉机不同作业速度对导航控制系统性能的影响,选择具有响应快速、对扰动不灵敏、物理实现简单等优点的滑模控制[21-23],提出了一种基于横向位置偏差和航向角偏差的双目标联合滑模控制算法,可改善速度变化引起的路径跟踪控制的不稳定性,从而提高拖拉机自动导航控制的动态跟踪性能和稳定性。
1 两轮拖拉机-路径动力学建模
如图1所示,将拖拉机的运动简化为二维平面上的运动描述,采用两轮模型,建立两轮拖拉机-路径动力学模型。在建模过程中,只考虑拖拉机的纵向、横向及横摆3个自由度,对轮胎侧偏角进行小角度假设,采用线性函数描述拖拉机运动过程中轮胎侧向力和横向力,并忽略拖拉机前进过程中的滑移。
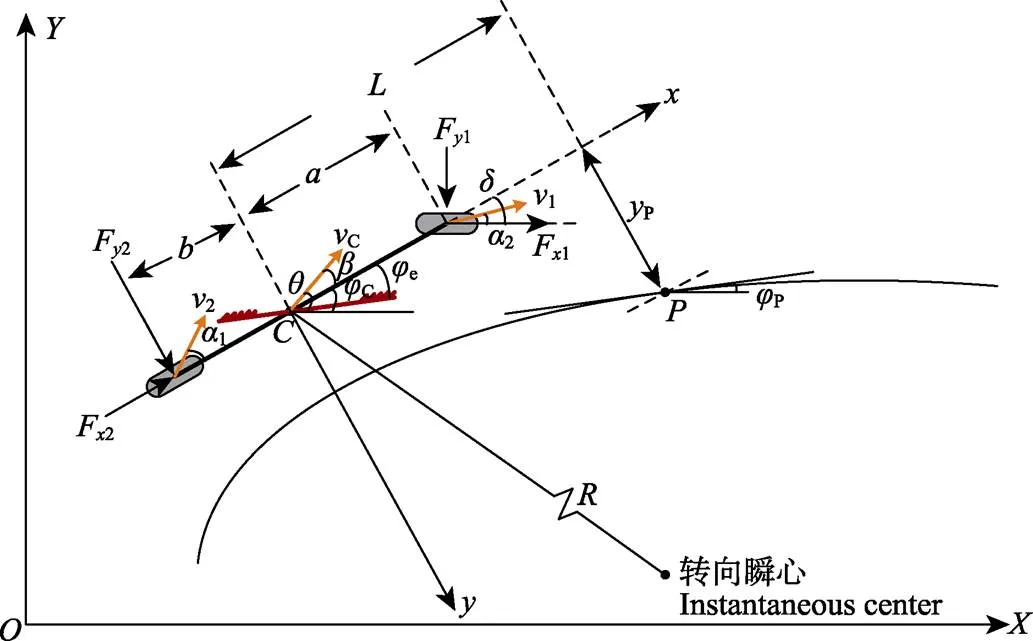
注: X-O-Y为导航坐标系,O导航坐标系的原点,x-C-y为车身坐标系;C点为拖拉机质心;P点为前视距离L处对应路径上的点;R为转向半径,m;Fx1、Fy1分别为拖拉机前轮纵向、侧向作用力,N;Fx2、Fy2分别为拖拉机后轮纵向、侧向作用力,N;vC、v1、v2分别为拖拉机质心处、前轮和后轮的速度,m/s;β、α1、α2分别为拖拉机质心处、后轮和前轮的侧偏角,rad;δ为前轮转向角,rad;q为行驶方向角,rad;φC为质心在惯性坐标系下的航向角,rad;φe为拖拉机航向角偏差,rad;φP为P点处的航向角,rad;a、b分别为拖拉机质心至前、后轮中心的距离,m;L为拖拉机的前视距离,m;yP为P点处的横向位置偏差,m。
在简化的拖拉机-路径动力学模型基础上,沿拖拉机航向方向设置一个距离为的前视距离,根据运动学关系,可以得到拖拉机在前视距离处与路径的横向位置偏差和航向角偏差[24],如式(1)、(2)所示。

式中DP为前视距离处拖拉机与路径的航向角偏差,rad;为拖拉机的横摆角速度,rad/s;P为点路径的曲率,m-1。
在直线行驶时,对式(1)、(2)进行小角度假设可得

由于质心侧偏角不能通过传感器直接测量得到,因此对其做如下转换

式中v、v为拖拉机质心上沿车身坐标系、轴方向的速度,m/s。
对田间作业管理中的实际负载进行简化,以拖拉机后悬挂的农具质量模拟田间作业管理的作业负载,添加到拖拉机-犁具机组质量中,结合两轮动力学模型,得到拖拉机-路径动力学模型,如式(6)所示。

式中1、2为当车轮侧偏角很小时,前、后轮侧向力与侧偏角的比例系数;为拖拉机绕质心的转动惯量,kg×m2;为拖拉机-犁具机组质量,kg。
进一步整理得
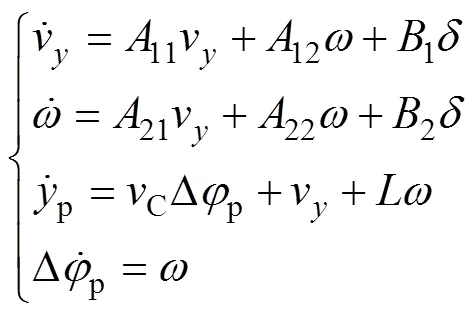
式中11、12、21、22、1、2为拖拉机-路径动力学模型状态方程的系数,在不同时刻拖拉机处于不同位置时,拖拉机-路径动力学模型状态方程的系数是实时变化的,以此来表达当前时刻拖拉机的行驶和路径跟踪状态,具体为

为了实现拖拉机对直线路径的实时稳定跟踪,选取状态向量,通过线性变换,建立直线路径跟踪偏差模型,如式(8)所示。

即

2 自动导航路径跟踪控制算法
2.1 总体方案
由式(9)可知,在建立的直线路径跟踪偏差模型中,对直线路径跟踪控制是以横向位置偏差和航向角偏差为控制目标的双目标联合控制。以期望在实现速度自适应的前提下,兼顾拖拉机行驶过程中的横向位置偏差状态和航向角偏差状态。因此,设计了基于横向位置滑模控制和航向角滑模控制的双目标联合滑模控制算法[25],控制原理如图2所示。

注:ẏP为横向位置偏差的变化率;DφP为前视距离L处拖拉机与路径的航向角偏差,rad;Dp为航向角偏差变化率,rad/s;U1为横向位置滑模控制器控制输出,V;U2为航向角滑模控制器控制输出,V;δ1为横向位置滑模控制器转向角控制输出,rad;δ2为航向角滑模控制器转向角控制输出,rad;γ为混合系数。
2.2 滑模控制器设计
针对横向位置偏差控制系统,定义输出误差为
设计横向位置偏差的控制滑模面为
式中w表示横向位置滑模控制器的滑模面Cw为横向位置滑模系数,且为正值。
选取Lyapunov函数V(w)=w2/2,求导可得

式中w为任意小的正整数,w>0。根据Lyapunov稳定性理论,如果所设计的控制系统是稳定的,则必须满足式(12)。
对式(11)进行求导,并结合式(8),可得


假设系统动态误差在滑模平面内,则有w=w=0,即可得系统进入横向位置滑模控制器后的等效控制输出为


为了减少控制器发生抖动对控制系统的稳定性的影响,提高系统对外界扰动的鲁棒性,采用连续饱和函数sat(w/w)代替理想滑模状态中经常采用的符号函数sgn(w),可得到横向位置滑模控制器的等效输出为
本研究由应用心理学专业的学生担任主试,以班级为单位进行团体施测,统一指导语,进行现场说明及相关注意事项。问卷填写完毕后,当场回收。

其中,sat(w/w)可由式(16)计算得到

式中w为横向位置滑模控制器的切换常数,w为横向位置边界厚度,无量纲。
同样地,航向角滑模控制器的等效控制输出为

式中sat(h/h)计算方法同横向位置滑模控制器;λh为航向角滑模系数,且为正值,h为航向角滑模控制器的标识。
在实际路径跟踪控制过程中,横向位置偏差和航向角偏差很难同时实现理想地控制。因此,在控制器中引入混合系数来调节两种控制策略的混合程度,取值为[0,1]。=0时,为横向位置滑模控制;=1时,为航向角滑模控制;在0和1之间的取值需要综合考虑横向位置滑模控制和航向角滑模控制的特点。联合滑模控制策略的输出为

3 联合滑模控制仿真
根据建立的直线路径跟踪的偏差模型和设计的联合滑模控制算法,应用Matlab/Simulink建立控制系统仿真模型,如图3所示。

注:δT为目标转向角,rad;δt为边界条件转化后的目标转向角,rad。
3.1 仿真参数的确定
根据建立的直线路径跟踪偏差模型,应用Matlab/ Simulink分别建立基于横向位置偏差的横向位置的滑模控制器、基于航向角偏差的航向角滑模控制器。通过设定前视距离3~6 m进行多组仿真对比,当前视距离设定为5 m时,拖拉机直线路径跟踪控制的效果最优,确定前视距离为5 m;在不同的速度条件下进行仿真,得到2个独立滑模控制器的最优参数,即滑模控制器中的滑模系数、切换常数和边界厚度。
在确定2个独立滑模控制器的最优仿真参数的基础上,进行联合滑模控制仿真。改变不同的值,以获得不同速度条件下较好的响应特性,经多次仿真得到= 0.3。此时,再对所确定的横向位置滑模控制器和航向角滑模控制器的参数进行微调。
通过多次的仿真试验发现,在不同速度条件下,在确定=0.3的情况下,横向位置滑模系数λw、横向位置边界厚度w、航向角滑模系数λh、航向角边界厚度h、以及航向角滑模控制器的航向角切换常数h对仿真结果影响较小,约为一定值。但是,横向位置滑模控制中的切换常数w影响较大,参数w与速度的变化呈较强的线性关系,可近似用式(19)表达

式中为拖拉机行驶速度,m·s-1。
最终,确定仿真参数如表1所示。

表1 滑模控制仿真参数设置结果
注:为拖拉机行驶速度,m·s-1。
Note:is the speed of tractor, m·s-1.
3.2 仿真结果与分析
3.2.1 定速工况下的仿真结果与分析
分别在0.8、1、1.5、2、2.5 m/s的定速工况下,根据式(22)确定不同的w值,对不同速度下的联合滑模控制效果进行仿真分析,结果如图4所示。

图4 不同速度的定速工况下的仿真结果
由图4可知,在不同速度条件的定速工况下,随着速度的提高状态响应达到稳态所需时间逐渐减小,在0.80 m/s速度条件下达到稳态所需时间最长,为8.30 s左右;拖拉机前轮转角的最大转角随着速度的提高显著减小;控制系统状态参数的超调量随着速度的提升变化不大。其中,横向位置偏差控制几乎没有超调,航向角偏差控制的最大超调量稳定在5°左右。在不同速度条件的定速工况下,联合滑模控制对速度因素的干扰起到了较好的自适应控制作用,可实现快速稳定的控制。
3.2.2 变速工况下的仿真结果与分析
设定拖拉机前进速度在0.50~3 m/s之间变化,对变速工况下的联合滑模控制效果进行仿真分析,结果如图5所示。
从图5可知,变速工况下的状态响应达到稳定状态时,横向位置偏差控制几乎没有超调,航向角偏差控制的最大超调量稳定在5°左右。在变速工况下,联合滑模控制对速度因素的干扰起到了较好的自适应控制作用,且对于低速工况也能实现快速而稳定的跟踪。

图5 变速工况下的仿真结果
4 田间试验
4.1 试验平台
为了分析和验证所设计的拖拉机自动导航控制系统的性能,以福田雷沃欧豹TG1254拖拉机为载体,在现有定位系统、转向系统和导航控制终端基础上[26-28],搭建了拖拉机自动导航控制系统的田间试验平台,田间试验平台构成如图6所示。试验平台主要技术参数如表2所示。
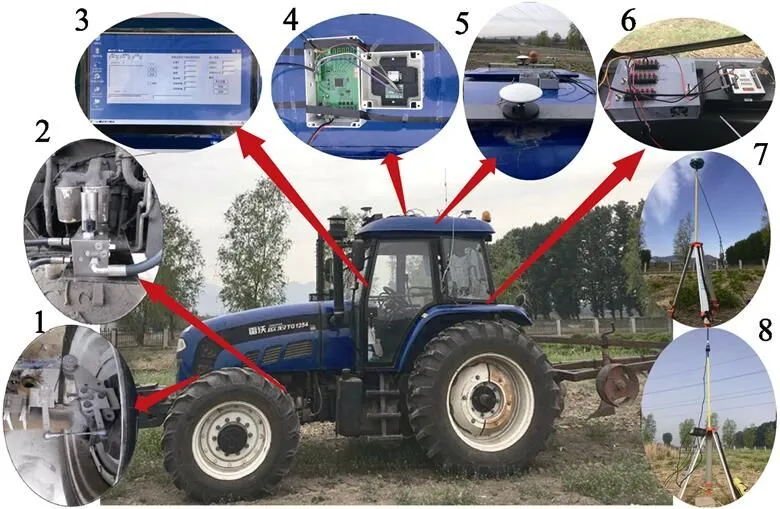
1. 前轮转角传感器 2. 比例集成控制阀 3. 导航控制终端 4. 控制器和微型惯性测量单元 5. 移动站天线6. 车载电源和驱动器 7. 基站天线 8. 基准站
4.2 试验方案
试验地点在中国农业大学上庄试验站北区,试验地块为播种前的棉花种植田,主要内容包括定速工况和变速工况下的拖拉机直线路径跟踪试验。在拖拉机-路径模型中,以控制前视距离处的航位偏差值预测值为零作为控制目标。在田间试验过程中,以实时采集到的拖拉机位姿坐标来计算横向位置偏差和航向角偏差,并实际监测当前时刻拖拉机质心的横向位置偏差和航向角偏差,来评价拖拉机导航自动控制系统的控制效果。
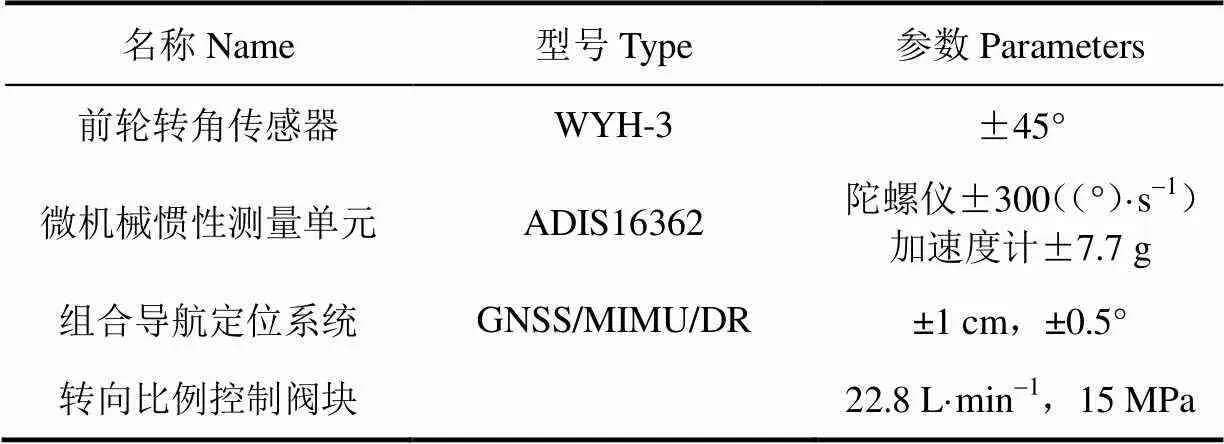
表2 主要传感器选型
设定前视距离为5 m,系统采样频率是5 Hz,控制频率是5 Hz,采样时间80 s。在试验开始前,首先根据实际田间作物行规划一条目标直线路径,通过组合导航定位系统静止采集路径起始点的位置坐标,并完成坐标转换到导航坐标系,连结两点即得到目标路径。然后将拖拉机靠近目标路径,开启自动导航控制模式,对目标路径进行跟踪。在这个过程中,通过组合导航定位系统实时采集拖拉机的位置坐标,即在导航坐标系下可形成拖拉机的运动轨迹;同时,计算出运动过程中拖拉机与目标路径的实时横向位置偏差和航向角偏差,并通过前轮转角传感器的反馈信号,计算拖拉机实际转向角,通过控制器和导航控制终端进行采集数据并计算分析。
4.2.1 定速工况下的直线路径跟踪试验
拖拉机分别以A2挡(=0.55 m/s)、B1挡(=0.80 m/s)、B2挡(=1.05 m/s)定速行驶进行直线路径跟踪,试验结果如图7所示。
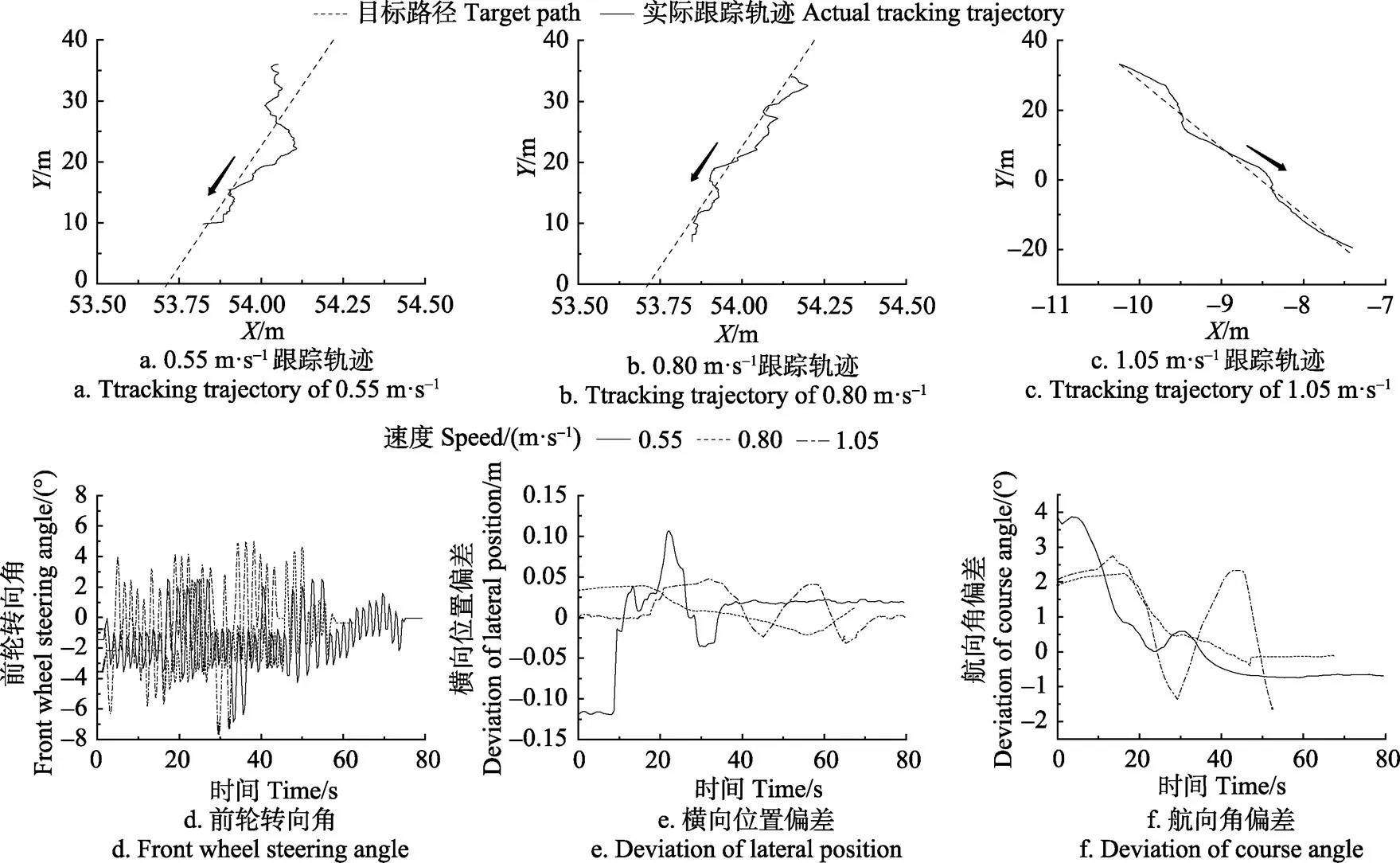
注:图a、b、c中的横坐标X、纵坐标Y表示拖拉机在导航坐标系X-O-Y中的位置;箭头表示拖拉机的行驶方向。
对试验结果进行统计分析,以转向角的最大值和标准差值、横向位置偏差和航向角偏差变化的平均绝对偏差(mean atsolute deviation,MAD)和最大偏差来评价试验控制效果,统计分析结果如表3所示。

表3 定速工况下试验结果分析
由表3可知,在不同速度条件的定速工况下,横向位置偏差的最大偏差为10.60 cm,平均绝对值偏差够保持在3.50 cm以内;航向角偏差的最大偏差为3.87°,平均绝对值偏差保持在1.70°以内;实际转角的最大值为7.63°,波动标准差在2.88°以内。对拖拉机前轮转向角进一步分析可知,达到稳定状态后,前轮转向角摆动范围在3°以内,摆动标准差为0.80°。
4.2.2 变速工况下的直线路径跟踪试验
在变速工况下的直线路径跟踪试验中,拖拉机挂B1挡,控制油门大小开度不断变化,模拟拖拉机的变速工况,对目标直线路径进行跟踪,试验结果如图8所示。
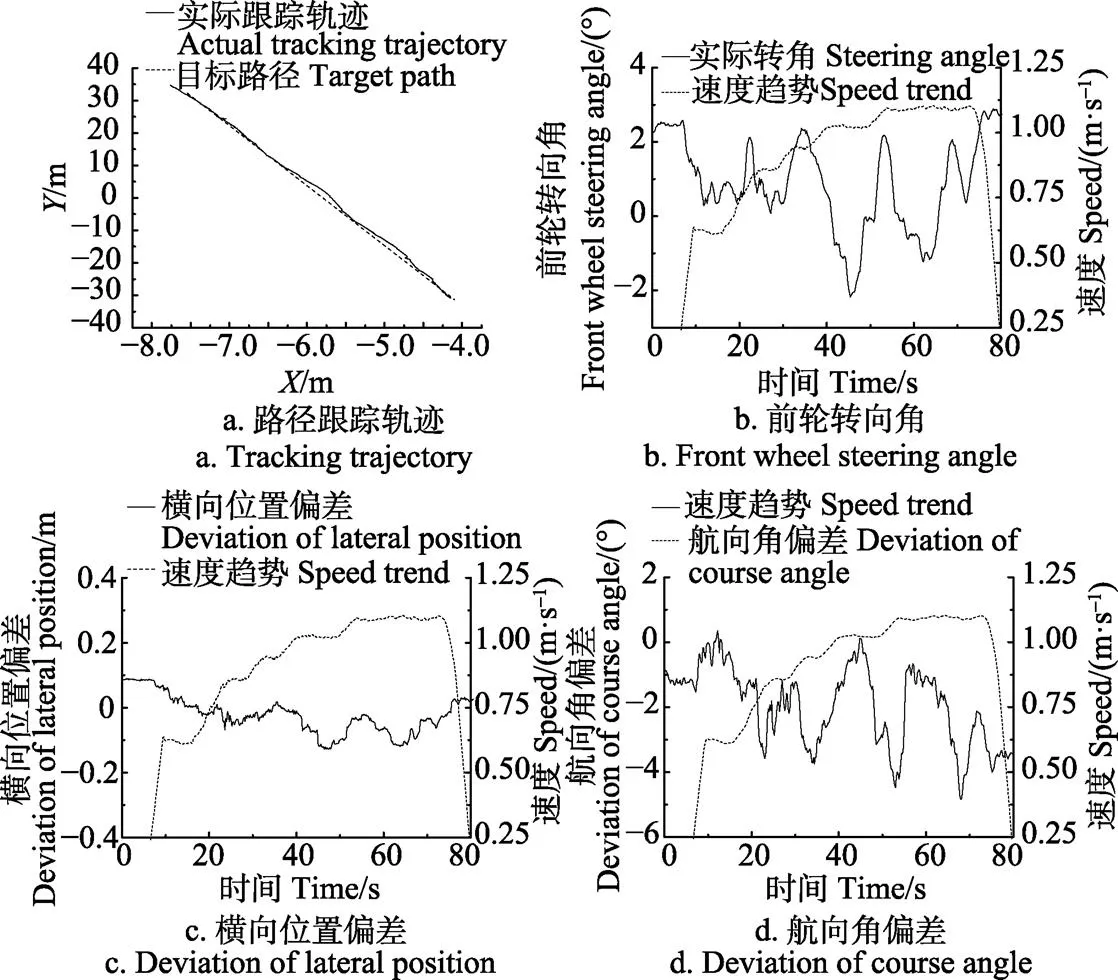
图8 变速工况下的试验结果
由图8可知,在变速工况下拖拉机进行直线路径跟踪自动控制时,横向位置偏差的最大偏差为12.80 cm,平均绝对偏差保持在4.90 cm以内;航向角偏差的最大偏差为5°,平均绝对偏差保持在2°以内;实际转角的最大值为3.12°,波动标准差在0.85°以内。
综上所述,在定速和变速工况下,采用本文所设计的联合滑模控制方法,能够实现横向位置偏差和航向角偏差的双目标联合控制,控制超调量较小,达到稳定状态以后控制偏差较小,对速度因素的适应性较强,基本满足农田作业的精度要求。
4.3 对比分析与讨论
对比现有研究,在文献29提出的基于PID的果园拖拉机自动导航控制方法中,直线路径跟踪的横向偏差最大值为15 cm;在文献30提出的基于最优控制的导航拖拉机速度与航向联合控制方法中,横向偏差最大值为12 cm,航向角偏差最大值为1.1°。分析可知:采用本文所设计的联合滑模控制方法,直线路径跟踪控制的横向偏差最大值均小于文献29和30的试验结果;航向角偏差大于文献30的试验结果。这是因为在田间试验过程时,对混合系数的取值侧重了对横向位置偏差的控制,造成航向角偏差变大。
另外,文献29和30提出的拖拉机直线路径跟踪控制方法,都是在近似拖拉机定速行驶条件下开展的,很难实现拖拉机作业过程中对速度条件的自适应控制。本文提出的联合滑模控制方法在定速和变速工况下,能基本实现对速度条件的自适应控制。在以后的研究中,通过仿真和田间试验,进一步调整混合系数的取值,将会提高基于速度自适应的拖拉机自动导航控制方法的直线路径跟踪控制效果。
5 结 论
1)在建立两轮拖拉机-路径动力学模型的基础上,引入速度因素,建立了直线路径跟踪的偏差模型,提出了基于横向位置偏差和航向角偏差的双目标联合滑模控制方法。
2)分别在定速和变速工况下,通过田间试验验证了双目标联合滑模控制方法的控制效果和稳定性。定速工况下的路径跟踪时,横向位置偏差的最大值为10.60 cm,平均绝对偏差在3.50 cm内;航向角最大偏差为3.87°,平均绝对偏差在1.70°内;达到稳定状态后前轮转向角摆动幅度在3°以内,摆动标准差为0.80°。在变速工况下,也能基本实现基于速度自适应的自动导航控制。自动导航控制的稳态偏差较小,稳定性较好。
论文提出的基于速度自适应的拖拉机自动导航联合滑模控制方法,在保证稳定的直线路径跟踪的同时,实现了对速度因素的自适应。
[1] 范玉萍. 基于精准农业概念下的农业机械化技术[J]. 农业科技与装备,2009,(5):104-105.
Fan Yuping. Agricultural mechanization technology under the concept of precision agriculture[J]. Agricultural Science&Technology and Equipment, 2009, (05): 104-105. (in Chinese with English abstract)
[2] 梁红. 我国“精准农业”现状及发展对策[J]. 农业与技术,2002,22(3):55-59. Liang Hong. The current situation and countermeasure about precision agriculture in China[J]. Agriculture & Technology, 2002, 22(3): 55-59. (in Chinese with English abstract)
[3] 李建平,林妙玲. 自动导航技术在农业工程中的应用研究进展[J]. 农业工程学报,2006,22(9):232-236. Li Jianping, Lin Miaoling. Research progress of automatic guidance technologies applied in agricultural engineering[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(9): 232-236. (in Chinese with English abstract)
[4] 李士心,王岩飞,杨晔,等. 低成本GPS/IMU 组合导航中的速度匹配对准研究[J]. 中国惯性技术学报,2005,13(1):35-37. Li Shixin, Wang Yanfei, Yang Ye, et al. Velocity matching alignment of low cost INS/GPS integrated system[J]. Journal of Chinese Inertial Technology, 2005, 13(1): 35-37. (in Chinese with English abstract)
[5] Rankin A L, Crane C D. Evaluating a PID, pure pursuit, and weighted steering controller for an autonomous land vehicle[J]. Proceedings of SPIE-The International Society for Optical Engineering, 1998, 3210: 1-12.
[6] Garciaperez L, Garciaalegre M C, Ribeiro A, et al. An agent of behaviour architecture for unmanned control of a farming vehicle[J]. Computers & Electronics in Agriculture, 2008, 60(1): 39-48.
[7] Vougioukas S, Blackmore S, Nielsen J, et al. A two-stage optimal motion planner for autonomous agricultural vehicles[J]. Precision Agriculture, 2006, 7(5): 361-377.
[8] Astolfi A, Bolzern P, Locatelli A. Path-tracking of a tractor- trailer vehicle along rectilinear and circular paths: A Lyapunov-based approach[J]. IEEE Transactions on Robotics & Automation, 2013, 20(1): 154-160.
[9] Kayacan E, Kayacan E, Ramon H, et al. Towards agrobots: trajectory control of an autonomous tractor using type-2 fuzzy logic controllers[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 287-298.
[10] 吕杰,单群. 约翰迪尔绿色之星导向系统[J]. 现代化农业,2007,(4):34-34.
[11] 曲晓飞. 美国的“绿色之星”精准农业技术[J]. 农村机械化,1999,(2):46.
[12] 韩科立. 拖拉机自动导航控制装置和控制方法研究[D]. 北京:中国农业大学,2012. Han Keli. Research on Control Device and Control Method of Automatic Navigation Tractor[D]. Beijing: China Agricultural University, 2012. (in Chinese with English abstract)
[13] Han Shufeng, Zhang Qin. Map-based control functions for autonomous tractors[J]. In: ASAE annual international meeting. California, USA; July 30-August 1, 2001.
[14] 牛雪梅,高国琴,鲍智达,等. 基于滑模变结构控制的温室喷药移动机器人路径跟踪[J]. 农业工程学报,2013,29(2):9-16. Niu Xuemei, Gao Guoqin, Bao Zhida, et al. Path tracking of mobile robots for greenhouse spraying controlled by sliding mode variable structure[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(2): 9-16. (in Chinese with English abstract)
[15] 焦俊,孔文,王强,等. 基于输入模糊化的农用履带机器人自适应滑模控制[J]. 农业机械学报,2015,46(6):14-19. Jiao Jun, Kong Wen, Wang Qiang, et al. Self-adaptive sliding mode control based on input fuzzy for agricultural tracked robot[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2015, 46(6): 14-19. (in Chinese with English abstract)
[16] 李琳辉,李明,郭景华,等. 基于视觉的智能车辆模糊滑模横向控制[J]. 大连理工大学学报,2013,53(5):735-741. Li Linhui, Li Ming, Guo Jinghua, et al. Fuzzy sliding mode lateral control of intelligent vehicle based on vision[J]. Journal of Dalian University of Technology, 2013, 53(5): 735-741. (in Chinese with English abstract)
[17] 赵翾,杨珏,张文明,等. 农用轮式铰接车辆滑模轨迹跟踪控制算法[J]. 农业工程学报,2015,31(10):198-203. Zhao Xuan, Yang Jue, Zhang Wenming, et al. Sliding mode control algorithm for path tracking of articulated dump truck[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 198-203. (in Chinese with English abstract)
[18] 冯雷. 基于GPS 和传感技术的农用车辆自动导航系统的研究[D]. 杭州:浙江大学,2004. Feng Lei. Study on Navigation System for Dff-road Vehicle Guidance Based on GPS and Sensor Technolog[D]. Hangzhou: Zhejiang University, 2004. (in Chinese with English abstract)
[19] 陈艳,张漫,马文强,等. 基于GPS和机器视觉的组合导航定位方法[J]. 农业工程学报,2011,27(3):126-130. Chen Yan, Zhang Man, Ma Wenqiang, et al. Positioning method of integrated navigation based on GPS and machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 126-130. (in Chinese with English abstract)
[20] 罗锡文,张智刚,赵祚喜,等. 东方红X-804拖拉机的DGPS自动导航控制系统[J]. 农业工程学报,2009,25(11):139-145. Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for Dongfanghong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 139-145. (in Chinese with English abstract)
[21] 史建华,杨春花,鲜浩,等. 基于滑模控制的双PID在某型稳定器中的应用[J]. 火炮发射与控制学报,2011,(1):65-68. Shi Jianhua, Yang Chunhua, Xian Hao, et al. The application of dual PID based on sliding mode control in stabilizer[J]. Journal of Gun Launch &Control, 2011, (1): 65-68. (in Chinese with English abstract)
[22] 李鹏,郑志强. 非线性积分滑模控制方法[J]. 控制理论与应用,2011,28(3):421-426. Li Peng, Zheng Zhiqiang. Sliding mode control approach with nonlinear integrator[J]. Control Theory & Applications, 2011, 28(3): 421-426. (in Chinese with English abstract)
[23] 张昌凡. 滑模变结构的智能控制理论与应用研究[D]. 长沙:湖南大学, 2001. Zhang Changfan. Research on Intelligent Control Theory and Applications of Sliding Mode Variable Structure[D]. Changsha: Hunan University, 2001. (in Chinese with English abstract)
[24] 赵熙俊,刘海鸥,熊光明,等. 自动转向滑模变结构控制参数选取方法[J]. 北京理工大学学报,2011,(10):1174-1178. Zhao Junxi, Liu Haiou, Xiong Guangming, et al. Method of parameter selection for automatic steering sliding mode control[J]. Transactions of Beijing Institute of Technology, 2011, (10): 1174-1178. (in Chinese with English abstract)
[25] 刘进一. 基于速度自适应的拖拉机自动导航控制系统研究[D]. 北京:中国农业大学,2017. Liu Jinyi. Research on Automatic Navigation Control System of Tractor Based on Speed Adaptation[D]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
[26] 张硕,杜岳峰,朱忠祥,等. 后轮驱动大功率拖拉机牵引力-滑转率联合自动控制方法[J]. 农业工程学报,2016,32(12):47-53. Zhang Shuo, Du Yuefeng, Zhu Zongxiang, et al. Integrated control method of traction & slip ratio for rear-driving high-power tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(12):47-53. (in Chinese with English abstract)
[27] 刘进一,杜岳峰,张硕,等. 基于GNSS/MIMU/DR的农业机械组合导航定位方法[J]. 农业机械学报,2016,(Supp. 1):1-7. Liu Jinyi, Du Yuefeng, Zhang Shuo, et al. Automatic navigation method for agricultural machinery based on GNSS /MIMU/DR information fusion[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2016, (S1): 1-7. (in Chinese with English abstract)
[28] Liu Jinyi, Tan Jingquan, Mao Enrong, et al. Proportional directional valve based automatic steering system for tractors[J]. Frontiers of Information Technology & Electronic Engineering, 2016, 17(5): 458-464.
[29] 刘沛,陈军,张明颖. 基于激光导航的果园拖拉机自动控制系统[J]. 农业工程学报,2011,27(3):196-199. Liu Pei, Chen Jun, Zhang Mingying. Automatic control system of orchard tractor based on laser navigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 196-199. (in Chinese with English abstract)
[30] 韩科立,朱忠祥,毛恩荣,等. 基于最优控制的导航拖拉机速度与航向联合控制方法[J]. 农业机械学报,2013,44(2):165-170. Han Keli, Zhu Zhongxiang, Mao Enrong, et al. Joint control method of speed and heading of navigation tractor based on optimal control[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2016, 44(2): 1-7. (in Chinese with English abstract)
张 硕,刘进一,杜岳峰,朱忠祥,毛恩荣,宋正河.基于速度自适应的拖拉机自动导航控制方法[J]. 农业工程学报,2017,33(23):48-55. doi:10.11975/j.issn.1002-6819.2017.23.007 http://www.tcsae.org
Zhang Shuo, Liu Jinyi, Du Yuefeng, Zhu Zhongxiang, Mao Enrong, Song Zhenghe. Method on automatic navigation control of tractor based on speed adaptation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 48-55. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.23.007 http://www.tcsae.org
Method on automatic navigation control of tractor based on speed adaptation
Zhang Shuo1, Liu Jinyi2, Du Yuefeng1, Zhu Zhongxiang1※, Mao Enrong1, Song Zhenghe1
(1.100083,; 2.570228,)
It has been widely accepted that the application of tractor automatic navigation technology plays a key role in promoting the development of precision agriculture. The following fact is the increase in tractor operation speed and improvement of working efficiency. Considering the diversity of terrain condition and environmental noises, however, the nonlinearity and instability of tractor automatic navigation control system might be magnified significantly along with higher tractor speeds. Conventional control methods have been found to be difficult to meet the requirements for tractor automatic tracking. To investigate the influence of tractor speed on system stability, the sliding mode method was proposed based on the integrated control algorithm of deviations of lateral position and course angle. Firstly, deviation model of tractor linear path tracking was established based on the two-wheel tractor dynamic model with the introduction of velocity. The motion of tractor was simplified as the description of motion in two-dimensional plane, and only 3 degrees of freedom, i.e. the longitudinal and transverse direction and yaw of the tractor, were considered and some simplifications were made in the process of modeling. The visibility distance was set along the tractor forwarding direction. According to the kinematic relationship, the deviations of tractor lateral position and course angle at the visibility distance were obtained. In the actual path-tracking control process, it was difficult to achieve the ideal control effect at the same time. Therefore, the mixing coefficient was introduced into the controller to adjust the mixing degree of the 2 control strategies. Adaptive control of different deviations and speeds could be achieved when the coefficient changed between 0 and 1. When it approached 0, the control system tended to complete lateral position control; while the strategy of course angle deviation control was preferred with its value approaching 1. The reliability of the proposed approach was verified by simulation using MATLAB/Simulink. The simulation results show that with the disturbance of tractor speed, rapid and stable tracking could be achieved for low speed conditions, too. Furthermore, an automatic navigation test platform was built on a Foton Lovol TG1254 tractor. For tractor operation conditions at constant and variable speeds, a series of field experiments were conducted for the straight-path tracking control. By analyzing the effect of dynamic tracking control at various speeds using the mean absolute deviation, the maximum deviation and the standard deviation, the performance of the proposed automatic navigation control system was verified. Experimental results showed that in the tractor path-tracking process, the maximum deviation of tractor lateral position was 10.60 cm; the mean absolute deviation of lateral position was below 3.50 cm; the maximum deviation of course angle was 3.87°; the mean absolute deviation of course angle was below 1.7°; the maximum swing angle of the front wheels was 3° in the steady state, and the corresponding standard deviation was 0.80°. Therefore, the speed-adaption-based tractor navigation system proposed in this study was experimentally verified and could achieve the basic speed-adaptive tracking control and further improve the precision of tractor navigation. Furthermore, it is possible to meet the agronomic requirements of actual operations in the field. The approach proposed in this study provides potential theoretical guidance and certain significance for practical tractor field operations.
mechanization; control systems; navigation; tractor auto-navigation; tractor-path dynamics model; sliding mode control; speed adaptation; simulation analysis
10.11975/j.issn.1002-6819.2017.23.007
TP274.2; S24
A
1002-6819(2017)-23-0048-08
2017-08-01
2017-11-07
国家重点研发计划项目(2017YFD0700403);国家高技术研究发展计划(863计划)项目(2013AA102307)
张 硕,山东滕州人,博士生,主要从事车辆智能控制领域的研究。Email:shuo891001@163.com
朱忠祥,浙江台州人,副教授,博士生导师,主要从事农业机械的设计、仿真,以及自动控制研究。Email:zhuzhonxiang@cau.edu.cn
