设施蔬菜收获机拉拔力学性能EDEM仿真与试验
2017-12-20高国华谢海峰王天宝
高国华,谢海峰,王天宝
设施蔬菜收获机拉拔力学性能EDEM仿真与试验
高国华,谢海峰,王天宝
(北京工业大学机械工程及应用电子技术学院,北京 100022)
针对设施蔬菜收获机在蔬菜拉拔的高度不能满足要求,根茎露出的距离过短,导致蔬菜切散,收获失败的现象,该文通过建立影响拉拔效果的拉拔力数学参数方程,以及对蔬菜根部和茎部的生物力学特性进行研究,从而建立蔬菜拉拔过程离散元仿真模型,利用离散单元软件EDEM(engineeringdiscrete element method),对蔬菜拉拔机理进行研究,从而确定最佳拉拔力及拉拔效果影响工作参数。通过仿真分析,得到蔬菜拉拔力与蔬菜位移的曲线及蔬菜拉拔仿真过程现象图,确定在最佳拉拔距离高度为20 mm时,对应最小拉拔阻力为26.87 N;利用对蔬菜根茎的拉伸压缩试验,得到在安全系数为1.1情况下,蔬菜根茎最大安全拉拔载荷为37.5 N以及蔬菜茎部最大安全压缩载荷为84.36 N。根据拉拔力的上下限,结合拉拔数学参数方程,确定了满足种植1~6株蔬菜的种植槽运输架的倾斜角度为17.8°,并核算在此倾斜角度下蔬菜茎部所受最大推力小于蔬菜最大破坏力值。将最终工作参数应用于单排样机试验,得到良好的收获效果,验证了设施蔬菜收获机关键参数取值的合理性,并为后续多排收获的整机研制打下了良好基础。
农业机械;力学特性;离散元法;设施蔬菜收获机;拉拔机理
0 引 言
中国是蔬菜种植大国,根据农业部数据,2014年中国蔬菜种植面积达3.21亿亩,产量达7.60亿t,种植面积和产量分别占世界的41.69%和51.13%;产值约1.3万亿元[1]。另外,随着中国城市化和工业化的推进,可耕土地总量在逐步减少,人多地少的矛盾将进一步加剧。因此,蔬菜种植必然向工厂化方向发展,工厂化蔬菜种植也将越来越受到人们重视和推广[2-3]。设施蔬菜种植是蔬菜种植工厂化的重要方式,但设施蔬菜温室机械化水平不足25%,蔬菜生产综合机械化水平约为20%左右,而我国叶菜类蔬菜占生产总量30%到40%[4],因此需优先发展叶类蔬菜的自动化生产机械。
国外对蔬菜收获机械的起步较早,技术相对成熟,以美国、加拿大、意大利等欧美国家主要针对大田和散叶蔬菜的收获,发展大型蔬菜作业装备,但并不能应用于中国设施蔬菜收获领域。相比于国外,中国的蔬菜收获机针对甘蓝、马铃薯、胡萝卜、玉米有了很深入的研究,但是针对设施蔬菜领域技术研究刚刚建立,而且国内市场开发的收获机都只适合大田露地蔬菜的收获,在设施蔬菜收获机方向还没有完整的成果,设施蔬菜对于收获机械的要求更加严格,精度要求更高,更容易出现收获效果不理想的现象[5-8]。因此,研制高效稳定的设施蔬菜收获机械是实现蔬菜种植工厂化和生产过程自动化、智能化的前提,对实现农业尤其是蔬菜生产机械化具有重要的意义。
离散元法(distinct element method,DEM)是一种处理非连续介质问题的数值模拟方法,广泛应用于散体物料处理领域。EDEM软件是基于离散单元法的通用CAE分析软件,用于对工业、农业生产中颗粒处理和操作系统进行模拟和分析[9-10]。目前其在作物拉拔收获中的应用还未见报道,但在农业领域尤其处理土基质作用问题中已取得了成功的应用。由高国华等对盆花移栽手爪的优化设计中,借助EDEM对移栽手抓提取土基质的过程进行仿真,通过对土基质受到花盆内壁阻力以及土基质内聚力的分析,明确了基质断层的原因,实现了基于土基质作用,有关力的分析研究[11];邓佳玉等对深松铲的仿真与试验研究中,应用EDEM对深松铲在不同工作参数下的工作过程和耕作阻力与实验测试结果进行了分析比较,证明了基于力的分析,采用离散元法分析分析深松铲在土壤中工作过程的可行性[12]。
因此本文针对设施蔬菜收获机在蔬菜拉拔高度不能满足要求,根茎露出距离过短,导致蔬菜切散,收获失败的现象,通过建立影响拉拔效果的拉拔数学参数方程,和对蔬菜茎部、根部生物力学特性的研究,结合离散元仿真方法从而确定最佳拉拔力及拉拔效果影响工作参数,最终应用于单排样机试验,得到良好的收获效果。
1 设施蔬菜收获机模型
1.1 蔬菜种植方式
设施蔬菜采用种植槽种植,将穴盘中培育好的穴盘苗通过移栽机移栽到种植槽内,可以有效减少种植空间,提高土地利用率,价格低廉,结构简单,且种植槽取放方便,隔热和保温效果良好,如图1所示。
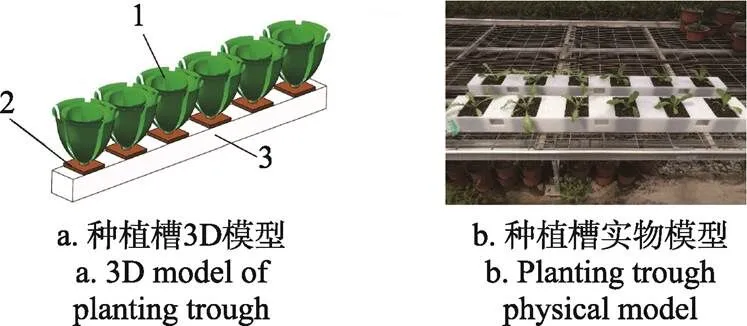
1. 叶类设施蔬菜 2. 无土基质栽培 3. PVC种植槽
1.2 蔬菜收获机整机结构设计
蔬菜收获机的技术要求是要保证收获的蔬菜菜叶的完整性,防止蔬菜在切割过程中刀具将菜叶切散,也没有因机构与菜叶之间相互作用导致挤压折断菜叶的情况。为了对蔬菜收获机进行设计,根据人工工作流程对收获机整机的工作流程进行研究,确定蔬菜收获机的工作流程如图2所示。

图2 设施蔬菜收获机收获流程
通过对上面设施蔬菜收获机的整机工艺分析,并结合蔬菜收获机的技术要求,完成了对叶类设施蔬菜通用收获机整机的初步结构设计[13],并利用SolidWorks完成整机的虚拟模型建立,如图3所示。
蔬菜收获机上具有一定倾斜角度的种植槽运输板前段摩擦力较大,防止种植槽在种植架上自由滑落。种植槽运输板后端为光滑钢板摩擦力较小,通过其上推杆将种植槽运输一段距离后,蔬菜到达拉拔机构处且种植槽完全处于光滑钢板上,蔬菜聚拢机构将蔬菜的菜叶聚拢保护的同时种植槽借以自身重力,通过其自适应性在拉拔机构处将蔬菜拉拔一定高度,蔬菜切割机构完成蔬菜的茎部切割工作。由于种植槽输送装置倾斜角度的影响,蔬菜会滚落到蔬菜输送带上,并通过输送带完成最后的蔬菜运输工作。
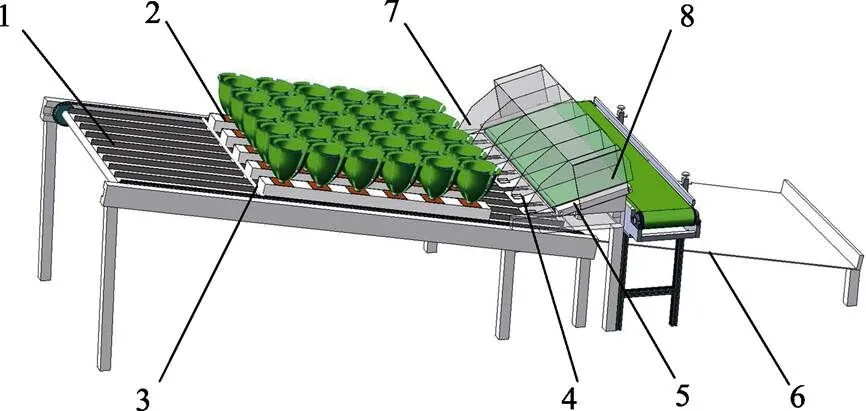
1. 种植槽输送装置 2. 种植槽 3. 推杆 4. 蔬菜拉拔机构 5. 蔬菜切割机构 6. 种植槽运输板 7. 蔬菜聚拢装置 8. 蔬菜输送带
1.3 蔬菜收获机存在问题
对蔬菜收获机的聚拢机构和切割机构进行样机制作,并进行试验测试,发现收获机的收获效果并不理想,主要是蔬菜茎叶距离基质高度很小,没有预留出刀具切割的距离,因此菜叶被刀具切散,导致蔬菜收获失败。因此需要确定最佳的拉拔工作参数,使得拉拔效果达到最理想的状态,从而避免蔬菜在收获过程中,由于没有足够的切割空间而导致蔬菜菜叶被切散。
2 拉拔参数方程建立
蔬菜在拉拔过程中蔬菜茎部以上及以下部分受力分析如图4所示。蔬菜种植在种植槽上,种植槽在倾斜运输架上运动,运输架倾斜的角度为,蔬菜及种植槽自身重力,受到斜面的支持力为,蔬菜重力为G,蔬菜受到压板的推力、摩擦力、支持力分别为F、f、N,蔬菜的茎部可以假想为二力杆,F和F'为蔬菜茎部所受到的反向拉拔力和拉拔力,是一对平衡力,蔬菜在受到压板拉拔过程中发生弯曲变形,为弯曲角度。
以蔬菜茎部以上为研究对象,压板与茎部接触点为原点,沿速度方向为正方向建立11坐标系,以蔬菜及种植槽整体为研究对象,其重心为坐标原点,沿速度方向为正方向建立22坐标系,则力的分解关系式如下所示。
茎部以上受力分析为

式中G为蔬菜重力,N;F为压板对蔬菜推力,N;f为压板与蔬菜间摩擦力,N;N为压板对蔬菜支持力,N;F为蔬菜茎部受到反向拉拔力,N;为倾斜角度,(°);为蔬菜弯曲角度,(°)。
茎部以下受力分析为

式中为蔬菜及种植槽重力,N;为运输架对种植槽的支持力,N;F'为蔬菜茎部受到的拉拔力,N;为运输架与系统的摩擦力,N;为运输架与种植槽的静摩擦系数。
注:1. 设施蔬菜 2. 压板 3. 倾斜运输架
1. Protected vegetables 2. Plate 3. Inclined carrying shelves
注:G为蔬菜重力,N;F为压板对蔬菜推力,N;f为压板与蔬菜间摩擦力,N;N为压板对蔬菜支持力,N;F为蔬菜茎部受到反向拉拔力,N;为倾斜角度,(°);为蔬菜弯曲角度,(°),为蔬菜茎部原始长度,mm;Δ为蔬菜茎部变形增长量,mm,为蔬菜及种植槽所受重力,N;为运输架对种植槽的支持力,N;F'为蔬菜茎部受到的拉拔力,N;为运输架与系统的摩擦力,N。
Note:Gis vegetable gravity, N;Fis the push force of the press plate to the vegetable, N;fis the friction between the press plate and the vegetables, N;Nis the support force of the press plate to vegetable, N;Fis the reverse pulling force for vegetable stems, N;is inclination angle, (°);is vegetable bending angle, (°),is the original length of the vegetable stem, mm; Δis the growth of vegetable stem deformation, mm,is the gravity of vegetables and planter, N;is the support of the carrier to the planters, N;F'is the pulling force on the vegetable stem, N;is the friction between the carrier and the system, N.
图4 蔬菜拉拔受力示意图
Fig.4 Force diagram of vegetable drawing

为了分析蔬菜弯曲变形角度的关系,将弯曲的弧线利用其切线近似,假想利用直角三角形的原理找寻角度关系,假设蔬菜茎部原始长度为,经过拉拔后,蔬菜茎部发生弯曲变形,变形的增长量为Δ,可由式(3)表示。
由式(1)可知,为压板提起蔬菜时作用力,其大小与和存在相互关系,又由式(3)可知,蔬菜拉拔高度与有关,因此确定最优的运输架倾斜角和最有效的拉拔高度将影响蔬菜拉拔效果和收获效果。
将上述式化简可得到蔬菜拉拔力方程为
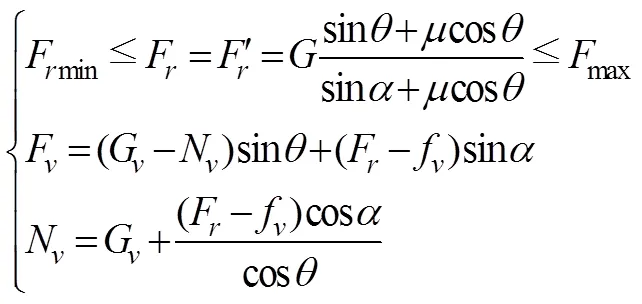
式(4)是拉拔力关于和的方程组,同时拉拔力F'的最大值不应超过根茎的最大拉力值,但要大于蔬菜拉拔的最小值,N与F的大小要保证不破坏蔬菜,防止拉拔过程中由于与压板发生作用,蔬菜茎部提前被破坏。由于力大小与和关系紧密,因此需确定拉拔高度以及运输架的最佳倾斜角度,从而获取可以成功拔起蔬菜的拉拔力。
3 设施蔬菜根茎力学模型建立
为确定蔬菜在收获过程中对蔬菜根茎的拉拔力,并对拉拔过程进行仿真分析,需建立蔬菜根茎的简化模型。为减少计算时间、提高计算可行性,建立根茎力学简化模型[14-15]。在建立蔬菜根茎力学简化模型中,需要得到蔬菜根茎的相关尺寸和力学参数,并对设施蔬菜样本的根部、茎部分别进行拉伸、压缩试验,为设施蔬菜拉拔力仿真参数及其他研究提供必要的理论支持。
3.1 设施蔬菜根茎尺寸参数
试验材料采用北京京鹏环球科技股份有限公司设施大棚内种植的设施生菜,于2016年10月23日采集。采集时,设施蔬菜处于成熟期,选取5株生长良好的植株作为蔬菜样本,将蔬菜根茎沿土壤缓慢取出,保持蔬菜根系的完整性,如图5所示。蔬菜结构参数如表1所示。利用游标卡尺测量蔬菜相应尺寸,为后续理论研究及工程应用提供基础。其中,茎部一部分埋藏在土壤内,如图5中1、4。蔬菜拉拔过程中,根部和茎部共同受力作用,因此在蔬菜生物力学特性研究中,拉伸试验试样称为根茎。
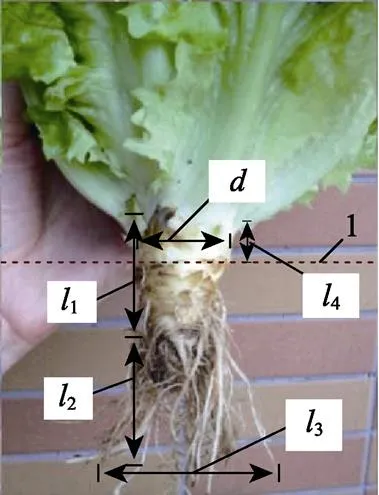
注:d:茎部的直径 l1:茎部的长度 l2:根部的长度 l3:根部的宽度 l4:茎部离种植槽上沿高度,下同。 1:种植槽上沿

表1 根茎结构尺寸数据
3.2 设施蔬菜生物力学特性
取生长健康,无机械损伤的根茎,根茎平均含水率87.1%,利用已破损的根系对两端夹持根茎部位进行加厚处理,并用粗细度为P120的砂纸裹上1层,在砂纸外再缠绕1层医用胶布,借此增大摩擦力,避免出现滑移现象。
由于要测量茎部垂直于轴线方向的力学参数,蔬菜茎部是圆柱形,很难保持稳定,极易发生滚动,若不进行预处理,很可能茎部在受力过程中发生滚动,因此试样两边用砂纸打磨平整。
拉伸和压缩试验采用的系统为ZQ-PT890A型小型万能材料试验机(100 N标准),采用井字纹夹头、圆盘型专用压头装置进行试验。ZQ-PT890A型小型万能材料试验机规格:测力分辨率:1/10 000(1 000 N/10 000=0.1 N);测力精度:高于±1%;试验速度:0.5~500 mm/min;试验行程:350 mm(不含夹具);机台容量:本机台最大测试量程为100 N。
3.2.1 蔬菜根茎拉伸试验
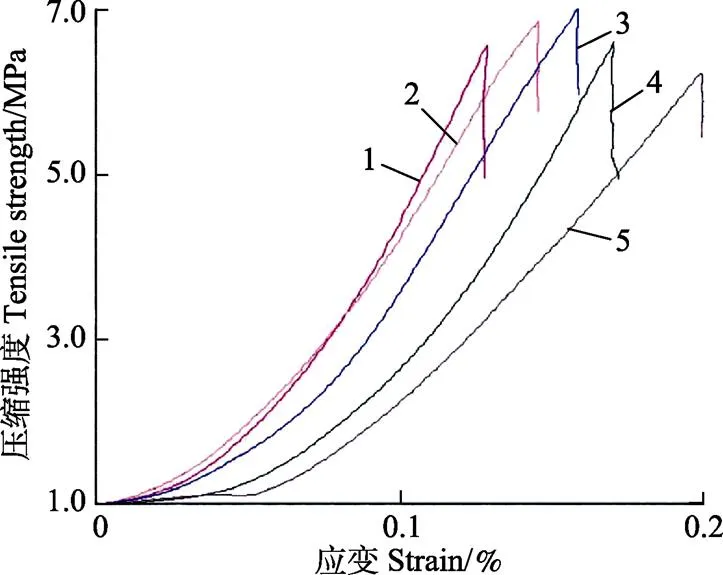
首先制作试样,然后用数显游标卡尺测定试样长度和外径,在试件中间段用黑碳素笔做上标记,然后按照要求夹在试验机上下夹头之间,试验速度为20 mm/min,在设定速度下,试件基本上都被拉断。试验过程中,计算机系统会自动采集数据点,自动绘制载荷位移和应力应变曲线,并记录最大拉力和弹性模量。当试样被拉断后,及时量取断裂处的厚度和宽度并记录,由于设施蔬菜根茎部位厚度并非均匀,所以要在断裂处附近从3个不同方位测量取平均值作为其直径。拉伸曲线如图6所示。

1. 试样1 2. 试样2 3. 试样3 4. 试样4 5. 试样5
在试验过程中会出现夹持部位被夹裂、夹持打滑等现象造成曲线失真。随着施加载荷的增加,曲线虽无明显屈服强化现象,但有明显塑性变形阶段,因此蔬菜根部拉伸力学特性可表现为一定的塑性。图6为通过拉伸试验获得的5组试样的拉伸应力-应变曲线,求得弹性模量并对其取平均值,则蔬菜根茎的近似拉伸弹性模量为4.57 MPa,取安全系数为1.1,则安全最大载荷37.5 N。通常水果与蔬菜的泊松比在0.2~0.5之间[18-19],这里取值0.3,则蔬菜根茎剪切模量为1.76 MPa。
3.2.2 蔬菜茎部压缩试验
同根茎拉伸试验一样,首先制作试样,由于所测为茎部径向的压缩力学性能,因此用砂纸打磨侧端,防止茎部因为受压而发生滚动。用游标卡尺准确测量试样的直径和长度,夹具采用平面圆形压块,在支座中心位置将蔬菜茎部放置安稳,试验速度为20 mm/min。压缩曲线如图7所示。
蔬菜茎部在径向压缩作用后破坏,与轴线成一定角度处发生断裂,表现出脆性材料的特性。图7为5组蔬菜茎部压缩曲线,求得蔬菜茎部的近似压缩弹性模量为38.28 MPa,取安全系数为1.1,则试验测得蔬菜垂直轴向方向茎部能承受的最大压缩载荷为84.36 N。这里蔬菜茎部泊松比取值为0.4,则蔬菜茎部的剪切模量为13.67 MPa。
1. 试样6 2. 试样7 3. 试样8 4. 试样9 5. 试样10
4 离散元模型的建立与拉拔工作参数研究
4.1 设施蔬菜拉拔仿真模型
采取以上设施蔬菜根茎结构尺寸数据的平均值,利用SolidWorks对蔬菜实现建模,并导入EDEM软件内,创建模块的几何体(Geometry),如图8所示,仿真参数如表2所示。根茎下面根系密集复杂,但其外部轮廓形状近似,定其简易模型的形状为圆锥形。简易模型可以代替复杂的根系模型建模,减少计算量,提高计算时间。模型中蔬菜茎部直径20 mm,底叶到根系之间的长度40 mm,根系长度37 mm,根系扩展宽度41 mm,仿真拉拔前,离种植槽上沿高度5 mm。

1. 压板 2. 种植槽 3. 蔬菜根茎
4.2 土基质颗粒模型
为方便模拟和减少计算量,土基质颗粒模型为球形,直径为0.8~1.2 mm,颗粒数为50 000个。并通过环刀法、土基质直剪试验和土基质3轴试验测得土基质颗粒泊松比为0.43,剪切模量为1.25 MPa,密度为0.782 g/cm3。利用颗粒工厂(Factory)在种植槽完成土基质颗粒的生成、压缩,最终得到蔬菜种植土基质模型如图9所示。
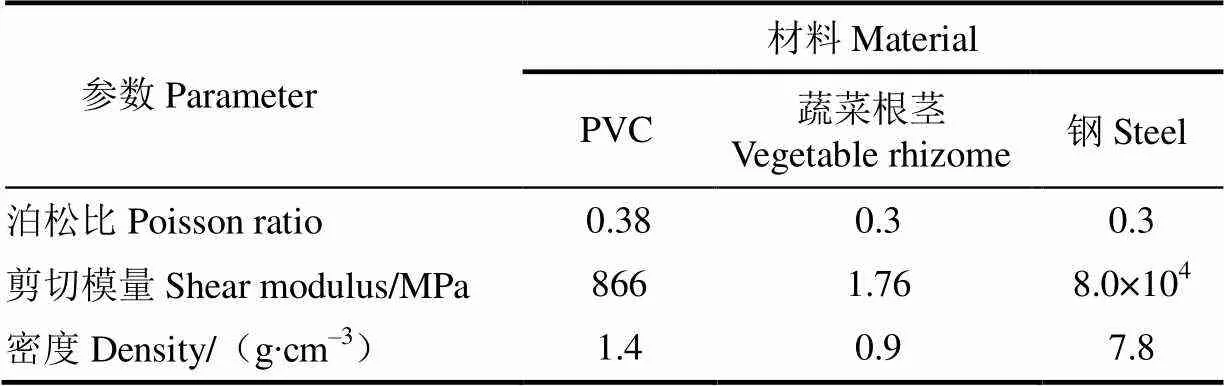
表2 EDEM材料特性仿真参数表
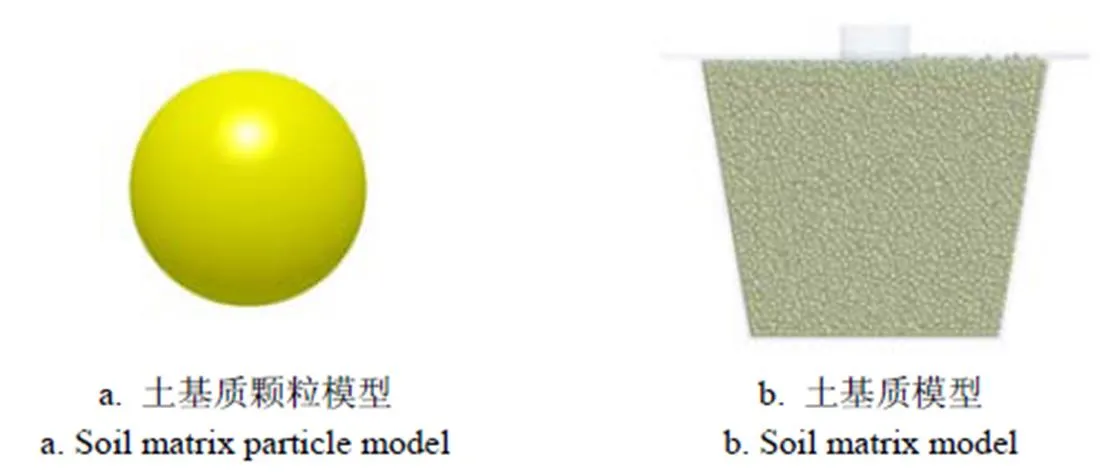
图9 蔬菜种植土基质3D模型
4.3 接触模型
在对蔬菜进行拉拔过程中,实际是由根系向上带动密实的土基质颗粒使其各部分相互移动、变形,迫使孔隙率增大和土基质松散化的过程。该过程是通过根系与土基质颗粒以及土基质颗粒自身之间的接触和碰撞来实现的,且受湿度等影响土基质颗粒间在接触区域内存在凝聚力的作用,而Hertz-Mindin with JKR 接触模型是1种凝聚力接触模型,可以在接触区域考虑范德华力影响,可以较好模拟湿颗粒的力学行为,因此为保证仿真结果真实准确,仿真采用Hertz-Mindin with JKR 接触模型,另外因根毛与土基质颗粒间也存在液桥作用,相互之间存在凝聚力作用,因此根毛与土基质颗粒间设置同种接触模型[21-22],模型如图10所示。

1. 颗粒刚度 2. 阻尼器 3. 滑动器
4.4 离散元仿真计算
利用EDEM求解器对建立的蔬菜拉拔模型进行模拟仿真,对土基质颗粒的生成、压缩,并且对蔬菜施加了向上运动的速度,最终得到蔬菜拉拔仿真模型如图11所示。由上文中拉拔过程的工作机理可知,蔬菜到达工位后靠种植槽自身重力的自适应性实现根茎的拉拔,拉拔速度不受人为控制,前期在16°、18°、20°3种倾斜角度下进行测试,其拉拔距离为19~24 mm,用时0.4~0.5 s,因此仿真实验设定其平均拉拔速度为50 mm/s。
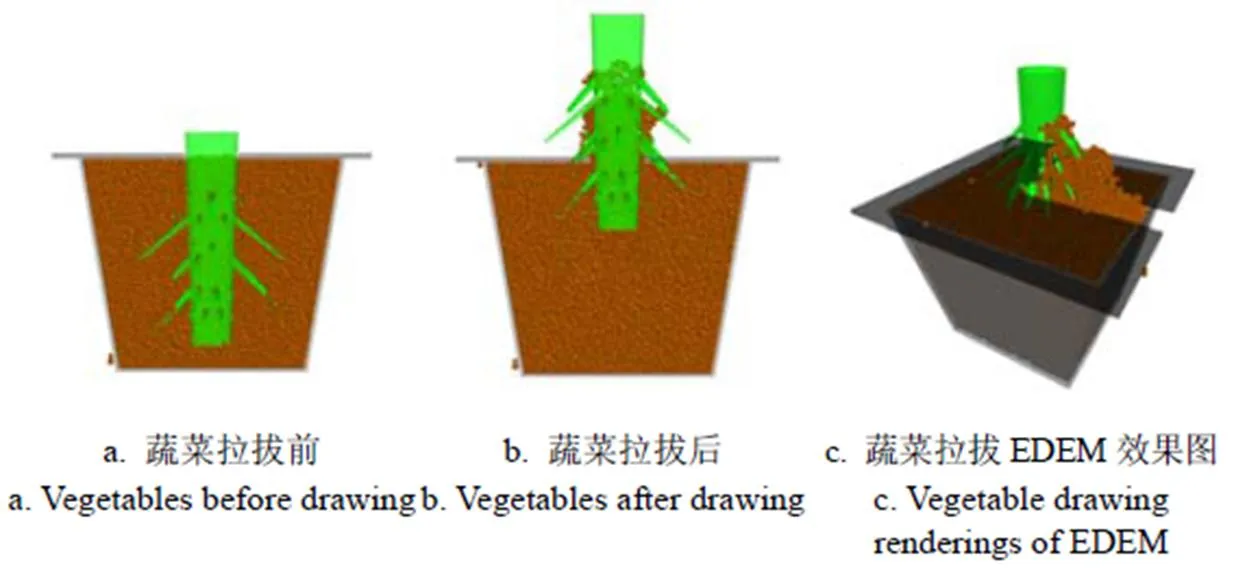
图11 蔬菜根茎拉拔仿真模型
通过软件仿真可以模拟蔬菜从土壤内拉拔的全过程,蔬菜根茎逐渐露出土壤表面,根系周边的土壤被翻起,整个种植槽内的土壤受到压板的作用,没有溢出槽外。根茎周边土壤密实度降低,根茎下方拔出部分会有土壤塌陷进行掩埋。再进一步通过仿真软件分析,可得速度大小为50 mm/s时,蔬菜拉拔50 mm过程中的蔬菜受到土壤的阻力与拉拔时间之间的关系图,如图12所示。
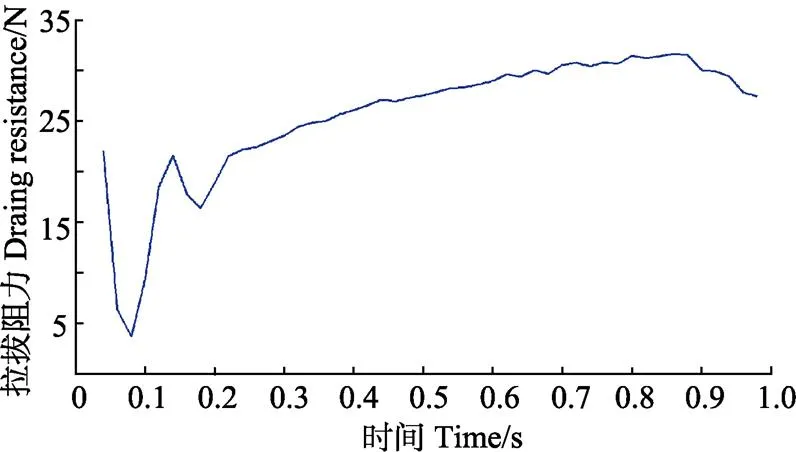
图12 蔬菜拉拔阻力与拉拔时间图
从图12可以看出,拉拔阻力随着位移的增加逐渐上升,茎部逐渐露出土面,拉拔阻力逐渐趋于平稳,待根部露出表面时,拉拔阻力开始出现下降趋势。经实际试验验证,在蔬菜切割过程中,由于蔬菜种植基质面与种植槽表面不能保证齐平,拉拔距离太短将导致拉拔效果不能满足要求,距离过大,根茎在切割之前被拉出,蔬菜倾倒,因此当茎部拉拔距离为20 mm时,能避免切割刀具切割菜叶,蔬菜切割达到最好的效果。当拉拔距离为20 mm时,对应的仿真时间为0.4 s,所对应的拉拔阻力为26.87 N。
4.5 设施蔬菜收获机拉拔参数确定
通过上面的受力分析、力学模型的建立以及离散元模型的仿真,已经确定了蔬菜的各项力学参数和最优拉拔距离所对应的拉拔阻力。将得到的拉拔力的最小值及蔬菜根茎的最大安全载荷作为蔬菜拉拔的边界参数,如式(5)所示。

式中种植槽与运输架之间的摩擦系数通过试验测量确定为=0.8。为蔬菜茎部露出土基质以上部分的长度,对种植槽内6株蔬菜进行测量,最终取其均值30 mm,Δ为蔬菜茎部伸长尺寸,即最佳拉拔距离为20 mm,由式(3)可以得出sin0.8,蔬菜茎部发生了约53º的弯曲变形。由于每个种植槽可以种6株生菜,因此每收获1株后,种植槽的总重量会发生变化,需要考虑种植槽变化对拉拔力的影响。通用蔬菜的质量为300 g/株,种植槽与土壤的质量为3.5 kg,因此取种植槽种植1~6株蔬菜与种植槽的重力之和分别为38、41、44、47、50、53 N(图13中1~6)。利用Matlab分别作出不同重力下蔬菜拉拔力与角度之间的关系曲线,如图13所示。
注:1~6种植槽总重分别为38 N、41 N、44 N、47 N、50 N、53 N,7为拉拔力上限,8为拉拔力下限。
Note: 1~6 aretotal weight of planting tiles 38 N, 41 N, 44 N, 47 N, 50 N, 53 N, 7 represents drawing force upper limit, 8 representsdrawing force lower limit.
图13 蔬菜拉拔力与倾斜角度关系曲线
Fig.13 Relationship between drawing force and inclination angle of vegetables
拉拔力上限为37.5 N,下限为26.87 N(虚线7和虚线8),为了求得可以适用于1~6株种植槽的倾斜角度,通过曲线图,利用Matlab中fsolve函数计算出种植槽内有单株蔬菜重力为38 N时与拉拔力下限的交点为0.308 7 rad,种植槽内有6株蔬菜重力为53 N时与拉拔力上限的交点为0.309 5 rad,2个极限角度理论取值相近,试验及仿真取值相对较小,因此种植槽运输架的角度选择为0.31 rad,即17.8°,蔬菜拉拔效果达到最优要求。
在得到蔬菜最优倾斜角度后,需要求得式(4)中压板对蔬菜的支持力N与压板对蔬菜的推力F的大小,其中sin0.8,cos0.6;f通过试验机连接夹具匀速提取蔬菜茎部,测得10.3 N;G为蔬菜自身重力3 N;种植槽倾斜角度的三角函数值sin=0.305 7,cos=0.952 1,带入到r表达式内,得到对应单个的种植槽内有6株蔬菜的最大拉拔力F=37.65 N。由式(4)得到蔬菜的支持力N为19.57 N,压板对蔬菜的推力F为15.97 N,结论小于蔬菜最大破坏力值,符合蔬菜校核标准,因此所选拉拔角度不会对蔬菜茎部造成破坏。最终确定拉拔工作参数,运输架的倾斜角度为17.8°。
5 试验验证
2017年4月,根据对设施蔬菜收获机的工艺改进以及对其工作参数的设计研究,完成了设施蔬菜单排样机的生产制造,并结合3D打印技术,利用PLA材料完成设施蔬菜种植槽的增材制造,可以有效降低制造成本并减轻整机重量,单排样机的种植槽运输架可以对角度进行调整。设施叶类蔬菜利用种植槽委托北京京鹏环球科技股份有限公司培育,利用已经在设施温室大棚培育生长良好的设施蔬菜进行单排样机收获试验,如图14所示。
通过单排样机的试验发现,机器在工作中可以实现收获过程中的主要功能,推杆可以将种植槽推送到收获位置,通过聚拢拉拔机构在种植槽自适应性下将蔬菜提离所需距离,平均提离速度50 mm/s,蔬菜切割机构可将蔬菜茎部平稳切割,蔬菜被切散的问题得到了有效的改善,利用单排样机分别对种植槽种植试样编号1~6分别进行3次试验,并测定拉拔高度,取得平均值,然后驱动刀具完成切割,对切割效果进行评定,计算改进运输架倾角后的收获成功率,其收获效果如表3所示。
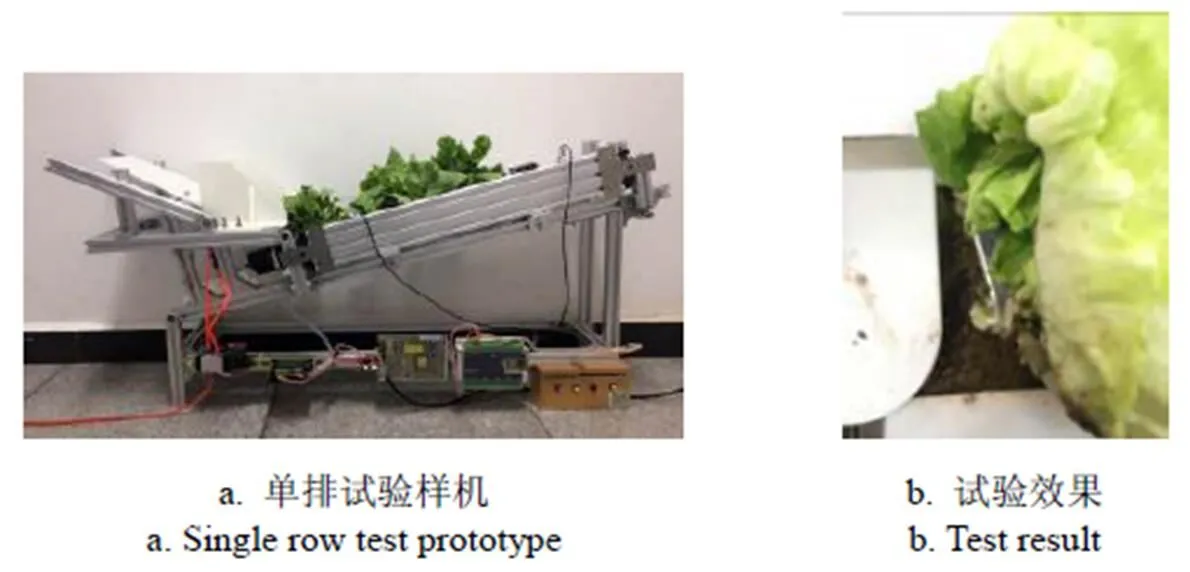
图14 设施蔬菜收获机单排试验

表3 设施蔬菜收获机单排收获效果
6 结论
本文针对蔬菜在切割过程中蔬菜茎部露出土面过少,导致刀具切散蔬菜的问题,对蔬菜的拉拔过程进行了详细的分析,研究了蔬菜拉拔机理,本文的主要工作内容包括:
1)建立了设施蔬菜收获机模型,并对蔬菜收货过程中切散问题进行分析,对蔬菜拉拔过程进行受力分析,建立拉拔力参数方程,分析出了影响蔬菜拉拔力关键因素是蔬菜拉拔高度及运输架倾斜角度。
2)对多株蔬菜的根茎和茎部进行了测量,对蔬菜的根茎部进行了拉伸试验,得到了蔬菜根茎的拉伸最大安全载荷=37.5 N和拉伸剪切模量=1.76 MPa,同时对蔬菜的茎部进行了压缩试验,得到了蔬菜压缩的最大载荷=84.36 N和压缩剪切模量13.67 MPa,并由此建立了蔬菜的简化生物模型。为蔬菜拉拔过程离散元仿真模型的建立提供了参数基础。
3)利用离散元仿真模型得到蔬菜拉拔力与蔬菜位移的曲线及蔬菜拉拔仿真过程现象图,确定在最佳拉拔距离高度为20 mm时,对应最小拉拔阻力为26.87 N;并根据拉拔力的上下限确定了满足种植1~6株蔬菜的种植槽运输架的倾斜角度为17.8°。验证了关键参数取值的合理性。
[1] 王立浩,方智远,杜永臣,等. 我国蔬菜种业发展战略研究[J].中国工程科学,2016,18(1):123-136.Wang Lihao, Fang Zhiyuan, Du Yongchen, et al. Study on development strategy of vegetable seed industry in China [J]. China Engineering Science, 2016, 18(1): 123-136. (in Chinese with English abstract)
[2] 林羽,刘斌琼.浅谈我国设施农业发展状况[J].福建农业科技,2014,45(10):68-70.Lin Yu, Liu Binqiong. On the development of facility agriculture in China [J]. Fujian agricultural science and technology, 2014, 45(10): 68-70. (in Chinese with English abstract)
[3] 《当代农机》编辑部.设施农业——农业的工业化时代[J]. 当代农机,2014,43(1):8-9.
[4] 肖体琼,何春霞,崔思远,等. 蔬菜生产机械化作业工艺研究[J]. 农机化研究,2016,38(3):259-262.Xiao Tiqiong, He Chunxia, Cui Siyuan, et al. Study on mechanized operation process of vegetable production [J]. Journal of Agricultural MechanizationResearch, 2016, 38(3): 259-262. (in Chinese with English abstract)
[5] 陈永生,胡桧,肖体琼,等.我国蔬菜生产机械化现状及发展对策[J]. 中国蔬菜,2014,34(10):1-5.
[6] 韦勇,秦广明,金月,等.叶菜收获机械的研究现状及发展趋势[J]. 农业开发与装备,2016,22(8):98-100.
[7] 黄丹枫.叶菜类蔬菜生产机械化发展对策研究[J]. 长江蔬菜,2012,29(2):1-6.Huang Danfeng. Study on the Countermeasures of mechanized production of leafy vegetables [J]. Changjiang vegetable, 2012, 29(2): 1-6. (in Chinese with English abstract)
[8] 张文斌,张龙全,黄裕飞. 叶菜类蔬菜主要生产环节机械化发展现状与对策分析[J].江苏农机化,2015,31(1):53-56.Zhang Wenbin, Zhang Longquan, Huang Yufei. Analysis of the devels of the main production links of leafy vegetables [J]. Jiangsu agricultural mechanization, 2015, 31(1): 53-56. (in Chinese with English abstract)
[9] 海基科技.基于离散元技术的EDEM软件详解[J].智能制造,2012,19(5):36-40.
[10] 李洪昌,李耀明,唐忠,等. 基于EDEM的振动筛分数值模拟与分析[J]. 农业工程学报,2011,27(5):117-121.Li Hongchang, Li Yaoming, Tang Zhong, et al. Numerical simulation and analysis of vibration screening based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(5): 117-121. (in Chinese with English abstract)
[11] 高国华,马帅. 基于离散单元分析与物场分析的盆花移栽手爪优化[J]. 农业工程学报,2017,33(6):35-42.Gao Guohua, Ma Shuai. Improvement of transplanting manipulator for potted flower based on discrete element analysis and Su-Field analysis[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(6): 35-42.(in Chinese with English abstract)
[12] 邓佳玉,胡军,李庆达,等. 基于EDEM离散元法的深松铲仿真与试验研究[J]. 中国农机化学报,2016,37(4):14-18.Deng Jiayu, Hu Jun, Li Qingda, et al. Simulation and experimental study on the subsoiler based on EDEM discrete element method[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(4): 14-18. (in Chinese with English abstract)
[13] Cho S I, Chang S J, Kim Y Y, et al. AE—Automation and emerging technologies: development of a three degrees of freedom robot for harvesting lettuce using machine vision and fuzzy logic control[J]. Biosystems Engineering, 2002, 82(2): 143-149.
[14] 赵亮.根土复合体抗剪强度试验研究[D].长沙:中南林业科技大学,2014.Zhao Liang. Experimental Study on Shear Strength of Root Soil Complex[D]. Changsha: Central South University of Forestry and Technology, 2014. (in Chinese with English abstract)
[15] 闫海燕. 香根草根土复合体力学性能研究[D].重庆:重庆交通大学,2013.Yan Haiyan. Complex Mechanics Performance Research of GRS Vetiver[D]. Chongqing: Chongqing Jiaotong University, 2013. (in Chinese with English abstract)
[16] 马征,李耀明,徐立章.油菜茎秆弹性力学特性试验研究[J].农机化研究,2016,38(5):187-191.Ma Zheng, Li Yaoming, Xu Lizhang. Experimental study on mechanical properties of rape stem[J]. Journal of Agricultural MechanizationResearch, 2016, 38(5): 187-191. (in Chinese with English abstract)
[17] 梁莉,李玉萍,郭玉明. 小麦茎秆粘弹性力学性质试验研究[J]. 农机化研究,2011,33(5):174-177.Liang Li, Li Yuping, Guo Yuming. Experimental study on mechanical properties of wheat stalk viscoelasticity [J]. Journal of Agricultural Mechanization Research, 2011, 33 (5): 174-177. (in Chinese with English abstract)
[18] Blahovex J. Mechanical peoperties of some plant meterial[J]. Journal of Materials Science, 1988, 23(10): 3588-3593.
[19] Ogawa Y, Matsuura M, Yamamoto N. Young’s modulus and poisson’s ratio changes in japanese radish and carrot root tissues during boiling[J]. International Journal of Food Properties, 2015, 18(5): 1006-1013.
[20] Thakur S C, Morrissey J P, Sun J, et al. Micromechanical analysis of cohesive granular materials using the discrete element method with an adhesive elasto-plastic contact model[J]. Granular Matter, 2014, 16(3): 383-400.
[21] Li J, Webb C, Pandiella S S, et al. Discrete particle motion on sieves—a numerical study using the DEM simulation[J]. Powder Technology, 2003, 133(1): 190-202.
[22] 赵梓彤,赵川,付成华.基于JKR-Cohesion模型的湿颗粒松散堆积体滑坡模拟分析[J].人民珠江,2016,37(5):26-29.Zhao Zitong, Zhao Chuan, Fu Chenghua. Simulation analysis based on JKR-Cohesion model wet granular accumulation[J]. Pearl River, 2016, 37(5): 26-29. (in Chinese with English abstract)
[23] 李耀明,秦同娣,陈进,等. 玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011,27(1):160-164.Li Yaoming, Qin Tongdi, Chen Jin, et al. Experimental and analysis of mechanical characteristics of reciprocating cutting of corn stalk[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(1): 160-164. (in Chinese with English abstract)
[24] 张世福,宋占华,闫银发,等. 农作物秸秆切割试验台测控系统的研制与试验[J].农业工程学报,2013,29(增刊1):10-17.Zhang Shifu, Song Zhanhua, Yan Yinfa, et al. Development and test of measurement and control system for straw cutting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(Supp1): 10-17. (in Chinese with English abstract)
[25] 李小强,王芬娥,郭维俊,等.甘蓝根茎切割力影响因素分析[J].农业工程学报,2013,29(10):42-48.Li Xiaoqiang, Wang Fen’e, Guo Weijun, et al. Analysis of factors affecting the cutting forces of cabbage roots[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 42-48. (in Chinese with English abstract)
[26] 吴明亮,官春云,汤楚宙,等.油菜茎秆切割力影响因素试验[J].农业工程学报,2009,25(6):141-144.Wu Mingliang, Guan Chunyun, Tang Chuzhou, et al. Experiments on influencing factors of cutting force of rape stem[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(6): 141-144. (in Chinese with English abstract)
[27] 杨军伟,孙慧男,张卓青.离散元法及其在农业工程中的应用综述[J].粮食流通技术,2015,21(10):28-33.Yang Junwei, Sun Huinan, Zhang Zhuoqing. Discrete element method and its application in agricultural engineering[J]. Food circulation technology, 2015, 21(10): 28-33. (in Chinese with English abstract)
[28] 邓佳玉,胡军,李庆达,等. 基于EDEM离散元法的深松铲仿真与试验研究[J].中国农机化学报,2016,37(4):14-18.Deng Jiayu, Hu Jun, Li Qingda, et al. Simulation and experimental study of deep shovel based on EDEM discrete element method[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(4): 14-18. (in Chinese with English abstract)
[29] 宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011(增刊1):162-167.Song Zhanhua, Xiao Jing, Zhang Shifu, et al.Design and experiment on crank-connecting rod cotton stalk cutting text bench [J].Chinese Journal of agricultural machinery, 2011 (Supp1): 162-167. (in Chinese with English abstract)
高国华,谢海峰,王天宝. 设施蔬菜收获机拉拔力学性能EDEM仿真与试验[J]. 农业工程学报,2017,33(23):24-31. doi:10.11975/j.issn.1002-6819.2017.23.004 http://www.tcsae.org
Gao Guohua, Xie Haifeng, Wang Tianbao. EDEM simulation and experiment of pullout force of protected vegetable harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 24-31. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.23.004 http://www.tcsae.org
EDEM simulation and experiment of pullout force of protected vegetable harvester
Gao Guohua, Xie Haifeng, Wang Tianbao
(100022,)
Although China is a vegetable planting country, the degree of mechanization of vegetable production is low. With the advance of the urbanization and industrialization in China, arable land gradually becomes less, and the vegetable cultivation is paid more and more attention. Facilities vegetable cultivation is an important way for vegetable cultivation. However, the level of mechanization of protected vegetable is lower than 25%, and the comprehensive mechanization level of vegetable production is about 20%, while production of leaf vegetables in China accounts for 30%-40% of total production. Therefore, the development of efficient and stable facilities vegetable harvesting machinery is the premise to achieve the automation of vegetable plantation and production process, and is of great significance to achieve the mechanization of agriculture, especially vegetable production. However, the height of the existing vegetable picking machine can not meet the requirements, for the distance of the rhizome exposed is too short, which leads to the phenomenon that vegetable is cut loose and harvesting fails. Therefore, in this paper, the model of the vegetable harvester is established, and the problem of cutting is analyzed. Based on the analysis of the above and lower parts of the vegetable stem in the process of drawing, the mathematical parameters of the drawing force were analyzed, and the key factors affecting the pulling force of the vegetables were the height of the vegetables and the height slope. Through the tensile test of the rhizome of the vegetable sample and the compression test of the stem of the vegetable sample, the mechanics parameters of the vegetable were obtained, and the necessary theoretical support was provided for the simulation of the drawing of the vegetable and other research. The distinct element method (DEM) is a numerical simulation method for dealing with discontinuous medium problems. And it is widely used in the field of bulk material processing. EDEM (enhanced distinct element method) software is a general CAE (computer aided engineering) analysis software based on the DEM, which is commonly used to simulate and analyze particle processing and operating system in industry and agricultural production. At present, its application in crop harvesting has not been reported, but it has been successfully applied in the field of agriculture, especially in the treatment of soil matrix. The discrete element simulation model of vegetable drawing process was established by using discrete element software EDEM, and the optimal drawing force and drawing effect were determined by studying the mechanism of pulling the vegetables. According to the simulation analysis, the relationship between the pulling force of vegetables and the displacement of vegetables and the simulation process of vegetable drawing were obtained. It was determined that the minimum drawing resistance was 26.87 N when adopting the optimum drawing distance of 20 mm. The maximum safe drawing load of vegetable rhizome was 37.5 N and the maximum safe compression load of vegetable stem was 84.36 N under the condition of safety factor of 1.1, using small universal testing machine. According to the upper and lower limits of the drawing force and the mathematical parameters of the drawing, the inclination angle of the planting trough, which met the requirement of planting 1-6 rows of vegetables, was determined to be 17.8°. And at this angle of inclination, the maximum thrust value of the stem of the vegetable was less than the maximum destructive force of the vegetable 84.36 N. The final working parameters were applied to the single-row prototype test, and the good harvesting effect was obtained, which verified the rationality of the key parameters of the vegetable harvester.
agricultural machinery; mechanical properties; discrete element method; facility vegetable harvesting machine; drawing mechanism
10.11975/j.issn.1002-6819.2017.23.004
S225.92
A
1002-6819(2017)-23-0024-08
2017-07-05
2017-10-24
国家自然科学基金(51675011)—盆花移栽机筑模成穴机构多因素作用优化设计方法研究
高国华,博士,教授,主要研究方向为机械设计及理论。北京 北京工业大学机械工程与应用电子技术学院,100124。 Email:ggh6768@126.com
