EPS用PMSM弱磁控制方法与实现
2017-12-18吴煌辉龙永红范晋龙
吴煌辉,龙永红,石 伟,刘 贤,范晋龙
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
EPS用PMSM弱磁控制方法与实现
吴煌辉,龙永红,石 伟,刘 贤,范晋龙
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对汽车在紧急避障等工况下,驾驶员快速转方向盘时手感沉重问题,根据电动助力转向系统用永磁同步电机调速,设计超前角弱磁控制方法。电机转速在基速以下时采用id=0控制,电机在高转速下用弱磁控制,并用Matlab/Simulink进行了系统仿真验证。仿真结果表明,本弱磁控制方法能够有效地减少方向盘转矩,提高电机转速。
EPS;PMSM;超前角弱磁控制;id=0控制
0 引言
电机作为电动助力转向系统(electric power steering,EPS)的重要组成部分,其性能会直接影响EPS系统助力转矩的大小、力矩跟踪的性能、转向盘力矩脉动水平、系统噪声以及可靠性。永磁同步电机(permanent magnet synchronous motor,PMSM) 采用永磁体产生励磁磁场,省去了励磁绕组和机械换向装置,其结构比较简单,有较高转矩惯量比,功率密度大,相比于无刷直流电机,PMSM输出转矩脉动小,在低速下运行平稳[1-8]。EPS采用PMSM作为助力电机,可使助力转矩更为平滑,有利于提高驾驶员的操纵舒适性。
当汽车遇到危急事故时,驾驶员需快速打方向盘且需要PMSM提供很大的转速,但在实际情况中,当PMSM达到一定转速时就不能继续升高[1-5]。针对这一问题,EPS系统助力电机通常采用弱磁扩速方法进行解决。根据查阅的文献资料,应用较多的方法有以下几种:自适应弱磁控制算法、电压负反馈法、直接转矩弱磁控制法、梯度下降法等[1-6]。文献[1]提出一种前馈的模糊PI弱磁控制方法,该方法在EPS系统快速操控方向盘时,电机能够平滑地进入弱磁控制模式,提供平滑的助力转矩。文献[3]提出一种电压负反馈弱磁控制算法,其可对永磁同步电机进行扩速,在EPS系统中,该弱磁控制方法与矢量控制切换时,助力电机存在一定的抖动。文献[6]提出两种弱磁控制策略,并在大电流、低电压的情况下考虑定子电阻对电机进行仿真,试验证明该策略能够取得较好的控制效果。
考虑到EPS的实时响应性以及稳定性能,系统要求PMSM在紧急避障的情况下能够快速地提升转速,且电机实际电流能够实时地跟踪EPS系统请求的电流,并输出较小转矩。针对以上要求,课题组设计了一种超前角弱磁控制[5]方法,该方法在能够使电机由恒转矩的模式平滑地过渡到恒功率模式,且电机无抖动。该方法相较于其他的弱磁算法,简单且易于实现。
1 总体结构
电动助力转向系统在正常工况时,不会使助力电机转速达到额定转速以上,采用id=0(id为电机直轴电流)的控制策略,可以使转矩平稳、波动较小;而在紧急避障等需要快速打方向盘的工况下,一般需要的电机转矩不是很大,而是需要较高的电机转速,这时就需要将永磁同步电机的控制策略切换为弱磁控制来提高电机的转速。EPS系统的工作原理如图1所示。
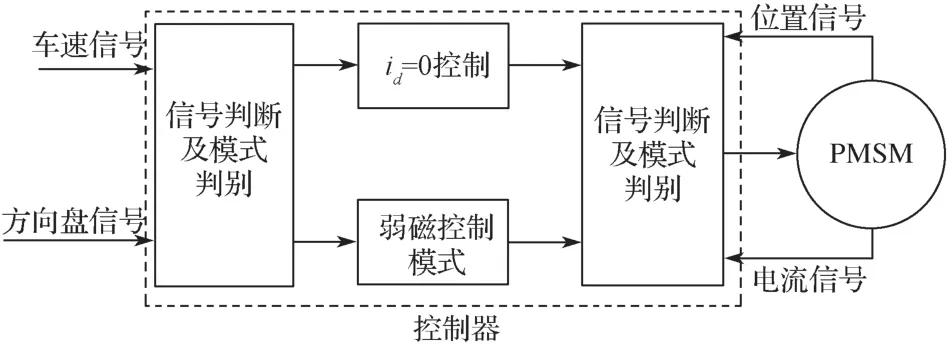
图1 EPS系统控制框图Fig. 1 EPS system control block diagram
图1中,在普通的助力模式下,采用id=0控制模式;当在快速操控方向盘模式时,采用弱磁控制模式。这2种控制策略的相互切换,兼顾了EPS系统对助力电机转矩和高转速的需求,很好地解决了快速转向时方向盘沉重的问题。
2 id=0控制策略
根据永磁体安装方式的不同,可将PMSM分为面装式、插入式和内装式3种[7-9]。根据EPS系统对助力电机性能及成本要求,课题组选用面装式永磁同步电机[1-5]作为EPS助力电机进行研究,并应用PMSM在dq坐标系下的简化模型。
2.1 PMSM数学模型
静止αβ坐标系与旋转dq坐标系之间的转换,如图2所示。其中θr为α轴与d轴的夹角;iα、iβ和id、iq分别是定子电流矢量is在αβ、dq坐标系的投影;β为定子磁链矢量与转子磁链矢量间的空间电角度;Ψf为永磁体磁链幅值;
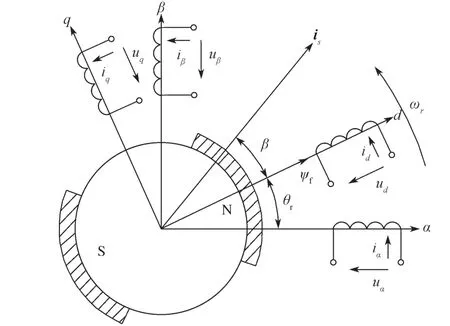
图2 静止αβ坐标系与旋转dq坐标系的转换Fig. 2 Transform from rotating dq coordinate system to αβ static coordinate system
根据位置关系可以将dq坐标分量变换到静止的坐标系,此变换过程称为Park变换[3-5]。电流方程为

同样的,dq坐标系下电磁转矩方程为


式(1)~(3)中,Te为电磁转矩;
pn为电机的极对数;
Ψd、Ψq分别为直轴磁链和交轴磁链。
通过以上坐标的转化,将dq坐标系下的PMSM模型进行了简化,为下面的矢量控制分析做了一定的准备。
2.2 矢量控制的实现
EPS系统对功率要求不是很大,但永磁同步电机伺服系统对过载能力和转矩响应性能有较高要求,系统助力电机在恒转矩区采用最大转矩电流比控制[1-7]。图3是id=0矢量控制系统图,速度环和电流环都为PI控制器。其中nref为电机的参考转速;n为电机的实际转速;iqref为交轴电流参考量;idref为直轴电流参考量;uqref、udref分别为iqref、iqref经过PI控制器之后输出的参考电压量;ia、ic分别为电机反馈的a、c相电流;θ为电机的转子位置。
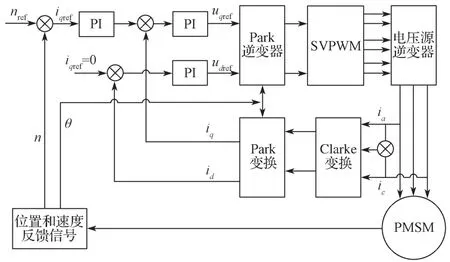
图3 id=0时矢量控制系统图Fig. 3 Vector control system diagram when id=0
当汽车在正常运行工况下,EPS系统的助力电机运行在基速以下,此时电机采用id=0控制。在矢量控制中,使用SVPWM[3-10]调制,实现了对逆变器直流侧电压的最大利用。
3 超前角弱磁控制
在正常情况下,电机的额定转速一般不会达到基速以上,采用id=0控制的控制策略可以使转矩平稳、波动小;但是当EPS系统要求电机实现高转速时,由于受到逆变器输出电压的限制,PMSM达到一定的转速时就不能继续升高转速,此时电机转速要进行弱磁扩速[3-6]。
3.1 电压极限圆
受逆变器最大输出电压的限制,当永磁同步电机运行稳定时,交、直轴电压合成的电压矢量应满足公式,将交、直轴电压方程代入式中,可以得到:

式中ulim为逆变器最大输出电压,且,udc为给定电源电压。
3.2 电流极限圆
受逆变器输出电流和永磁同步电机自身最大电流的限制,永磁同步电机稳定运行时,电流矢量的轨迹就是以坐标原点为圆心的圆,该圆称为电流极限圆[3-10]。永磁同步电机稳定运行时,定子电流矢量不能超出电流极限圆和电压极限圆的范围。图4是隐极式PMSM电压极限圆和电流极限圆。
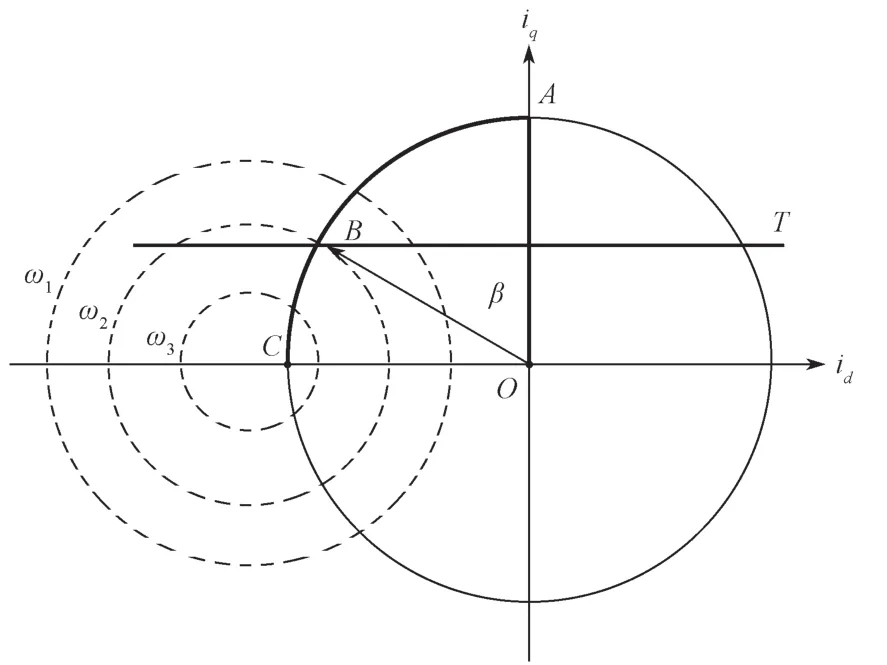
图4 电压极限圆和电流极限圆Fig. 4 Voltage limit circle and current limit circle
根据PMSM稳定运行时的电压平衡方程,可得到电机速度ωe的表达式如下[5]:

当电动机端电压和电流均达到最大值时,电流全部为直轴电流分量,即id=-ilim,iq=0,电机可以达到的理想最高转速ωe,max为:

式中ilim是定子电流最大值。
通过以上对弱磁控制原理的分析,在实际的EPS系统中,提高PMSM的弱磁能力主要是在满足电压极限圆和电流极限圆的基础上,避免电流调节器的饱和,从而能够使PMSM由矢量控制模式平滑、快速地过渡到弱磁控制模式。
3.3 超前角弱磁控制实现
超前角弱磁控制是通过增加β角来增加直轴电流,利用id的去磁作用减小永磁体的磁通,保证电动机电压不会超过逆变器的输出极限值,这一种实现方式称为电流超前角β弱磁控制。根据弱磁控制原理的分析,本文设计超前角弱磁控制的系统框图如图5所示。
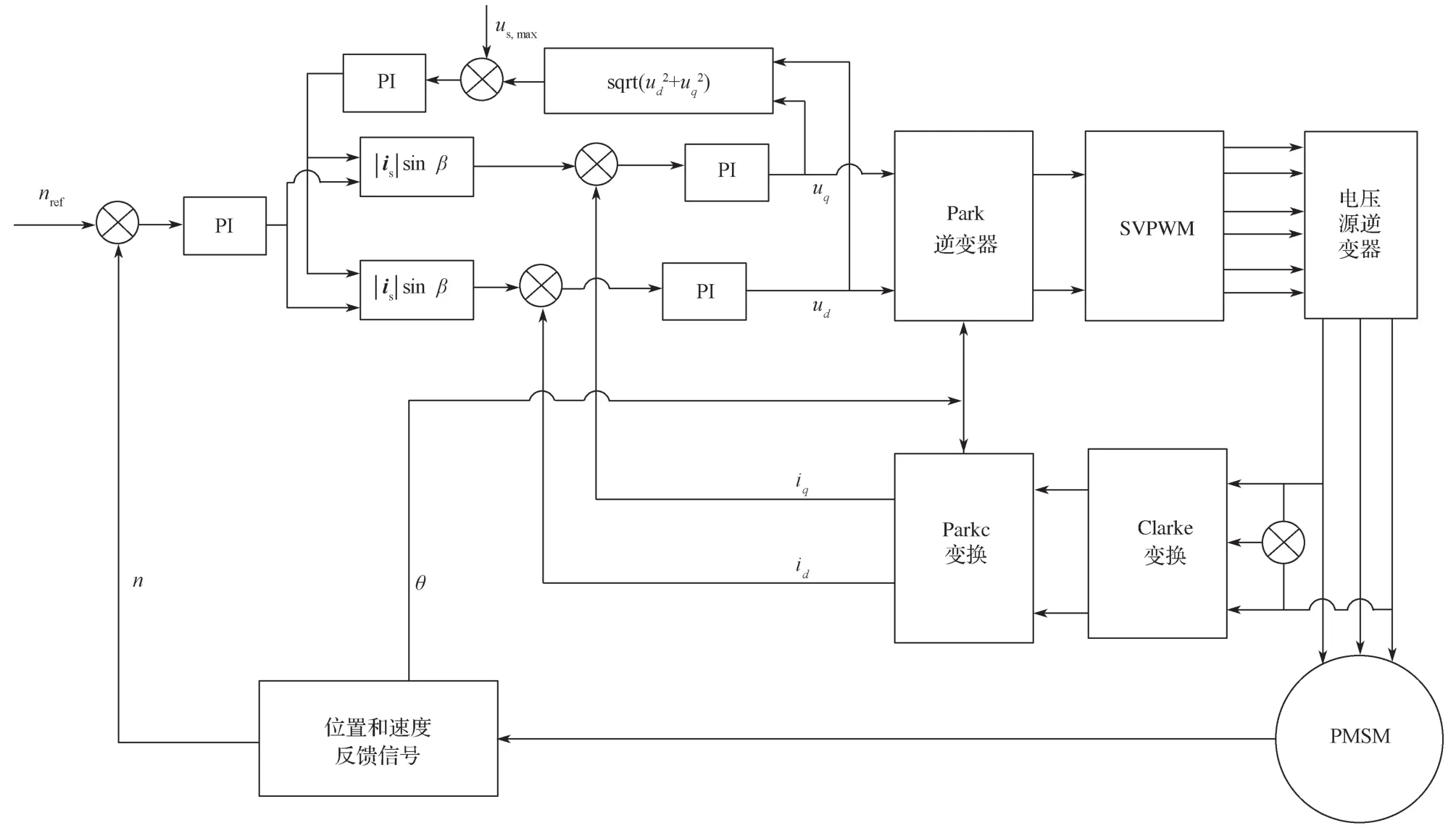
图5 超前角弱磁控制的系统框图Fig. 5 Lead angle fl ux-weakening control system block diagram
以下简单介绍弱磁控制原理:1)当|us|小于调制电压us,max时,由于PI控制器的饱和作用,输出β角为0,相当于id=0控制,此时PMSM处于基速以下运行[1-9]。2)随着转速的上升,电机端电压升高,如|us|大于us,max时,PI控制器输入为负值,电流超前角β开始出现负值,同时id出现负分量,此时进入弱磁控制[2-7]。为了防止电动机提前进入弱磁控制模式,根据文献[5],通常设定us,max=0.57udc。3)控制过程中,电压环PI控制器的输出幅度为(-0.5π,0),最大去磁电流idmax=ψf/Ld。
3.4 弱磁控制仿真结果及分析
课题组设计的超前角控制Matlab/Simulink仿真图,如图6所示,其中弱磁控制模块是图示中FW模块。电机参数采用EPS常用的助力电机参数,具体的参数设置如表1所示,并且给定电源的电压为udc=12 V。

表1 PMSM参数表Table 1 PMSM parameter table
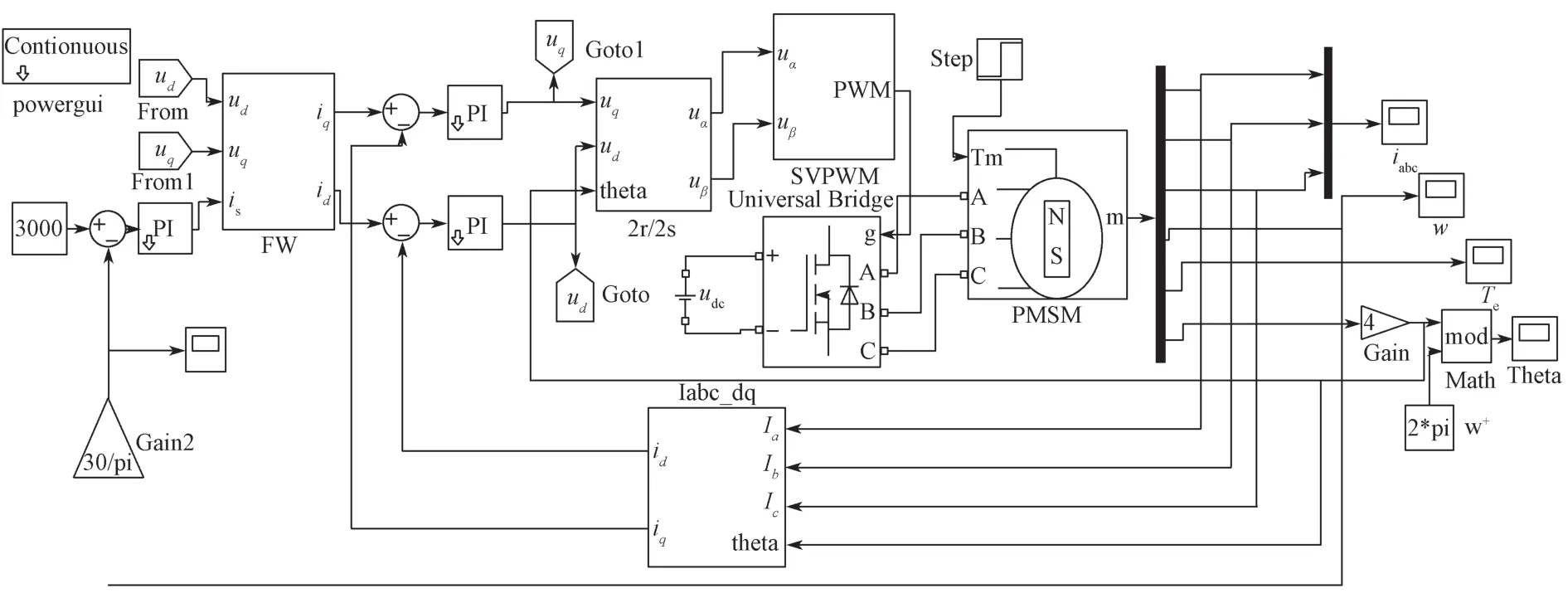
图6 弱磁控制系统仿真图Fig. 6 Simulation diagram of fl ux weakening control system
为了验证本弱磁控制方法的有效性,对电机弱磁控制进行了仿真试验。仿真电机控制采用速度控制模式,仿真时间为2 s,且电机不带负载启动,所得仿真曲线如图7所示。
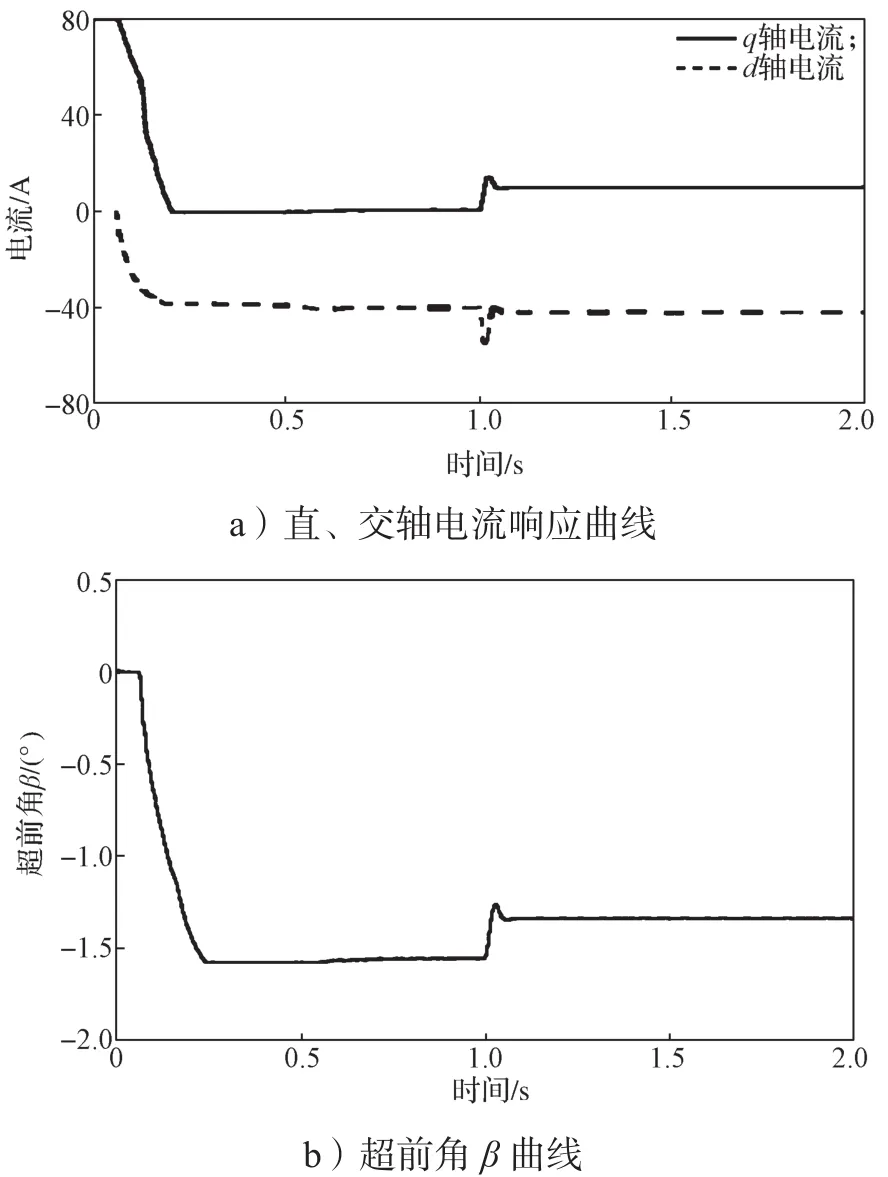
图7 弱磁控制系统仿真曲线Fig. 7 Simulation curve of fl ux weakening control system
由仿真图7a、7b可得,电机运行在基速以下时(t<0.06 s),电机工作在id=0控制模式;当t>0.06 s转速达到基速之后,电机从id=0模式进入恒功率弱磁模式。β逐渐增大,最后稳定到某一值,直轴电流反向增大,交轴电流逐渐减小到0。以上结果说明本文设计的超前角弱磁控制能够达到设计要求。
4 系统仿真结果及分析
EPS系统模型包括扭矩传感器模型、控制器模型以及助力电机模型。本研究设置系统的减速比为18,PMSM的转折速度为1 000 r/min,计算得出当方向盘转角速度超过0.9 r/s时,电机转速已经达到极限值,在没有加弱磁控制时,会使驾驶员手感沉重。为解决此问题,在Simulink中搭建EPS仿真模型。
根据所搭建的模型,加入本文的弱磁控制方法,以方向盘转角为输入信号,给定车速为80 km/h,得到了如图8所示仿真波形。
由图8a、8b可知,在快速转向时,没有加入弱磁控制PMSM的转速不能继续上升,而加入弱磁控制策略的PMSM转速得到了明显的提升,最高达到了3 000 r/min,满足了EPS系统在快速操控方向盘时对电机的转速要求。
由图8c可以看出,在快速操控方向盘后,加入弱磁控制后的方向盘转矩幅值明显小于id=0控制时的转矩幅值,且对方向盘的抖动问题也能得到一定的改善。

图8 系统仿真曲线Fig. 8 System simulation curves
综上分析,该弱磁方法能够有效地解决EPS系统中汽车在紧急避障等工况下,需快速操控方向盘时手感沉重问题。
5 结论
课题组在矢量控制和超前角弱磁控制PMSM原理的基础上,建立了EPS系统Matlab/Simulink系统仿真模型,根据仿真分析结果得出以下结论:
1)超前角弱磁控制PMSM具有过渡过程平滑稳定、电流控制准确、控制方法简单可行、受电动机参数影响小等优点;
2)仿真结果验证了该弱磁控制方法的可行性,为EPS在紧急避障等工况下需要电机提供较高转速提供了一定的实用参考价值,下一步研究的重点是将该弱磁控制方法运用到实际EPS系统中。
[1] 张 虎. 基于永磁同步电机的电动助力转向系统力矩控制算法研究[D]. 吉林:吉林大学,2015.ZHANG Hu. Study on Torque Control Algorithm of Electric Power Steering System Based on Permanent Magnet Synchronous Motor[D]. Jilin:Jilin University,2015.
[2] ISFAHANI A H,SADEGHI S. Design of a Permanent Magnet Synchronous Machine for the Hybrid Electric Vehicle[J]. International Journal of Electrical,Computer and Systems Engineering,2008,2(1):566-570.
[3] 申 雪,赵林峰,黄 鹤. EPS用永磁同步电机弱磁控制研究[J]. 汽车工程学报,2016,6(5):363-368.SHEN Xue,ZHAO Linfeng,HUANG He. Research of Flux-Weakening Control for PMSM Used in EPS[J].Journal of Automotive Engineering,2016,6(5):363-368.
[4] CHOI C,LEE W,KIM J,et al. Failure Modes Investigation and Analysis of Electric Power Steering System with PMSM Drives[J]. SAE International Journal of Passenger Cars-Electronic and Electrical Systems,2009,2(1):103-108.
[5] 张 鹏. 永磁同步电机弱磁调速控制方法的研究[D].天津:天津大学,2007.ZHANG Peng. Research on Flux-Weakening Control for Permanent Magnent Synchronous Motor Drive[D].Tianjin:Tianjin University,2007.
[6] 吕英超,季学武,孙 宁,等. EPS用PMSM弱磁控制策略的仿真与试验研究[J]. 汽车工程,2013,35(6):500-504.LYingchao,JI Xuewu,SUN Ning,et al. Simulation and Experimental Study on the Field Weakening Control Strategy for PMSM Used in EPS[J]. Automotive Engineering,2013,35(6):500-504.
[7] 张 凯,秦 斌,王 欣,等. 基于电压前馈解耦的地铁永磁同步电机矢量控制研究[J]. 湖南工业大学学报,2016,30(5):22-26.ZHANG Kai,QIN Bin,WANG Xin,et al. Research on Vector Control of Metro Permanent Magnet Synchronous Motor Based on Voltage Feed-Forward Decoupling[J].Journal of Hunan University of Technology,2015,30(5):22-26.
[8] 秦灿华,刘连根,曹 洋,等. MW级永磁同步电机无速度传感器矢量控制研究[J]. 湖南工业大学学报,2012,26(1):37-40.QIN Canhua,LIU Liangen,CAO Yang,et al. Research on Sensorless Vector Control of MW Turbine Permanent Magnet Synchronous Motor[J]. Journal of Hunan University of Technology,2012,26(1):37-40.
[9] 张树团,李伟林,鲁 芳,等. 永磁同步电机弱磁调速系统建模及仿真研究[J]. 船电技术,2010,30(6),14-22.ZHANG Shutuan,LI Weilin,LU Fang,et al. Modeling and Simulation of Permanent Magnet Synchronous Motor Flux-Weakening Control System [J]. Marine Electric &Electronic Technology,2010,30(6),14-22.
[10] 刘正奇,林 立,朱 虎,等. 电动助力转向系统永磁同步电机控制建模及仿真[J]. 邵阳学院学报(自然科学版),2015,12(1):75-80.LIU Zhengqi,LIN Li,ZHU Hu,et al. Model and Simulation of Electric Power Steering System in Permanent Magnet Synchronous Motor[J]. Journal of Shaoyang University(Natural Science Edition),2015,12(1):75-80.
Research on PMSM Flux-Weakening Control and Its Application in EPS
WU Huanghui,LONG Yonghong,SHI Wei,LIU Xian,FAN Jinlong
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
In view of the current fl aw that drivers feel clumsy when turning the steering wheel quickly in case of emergency obstacle avoidance, the design method of lead angle fl ux weakening control has thus been designed, based on the permanent magnet synchronous motor (PMSM) speed regulation for electric power steering system (EPS). id=0 control is to be adopted when the motor speed is below the base speed, with the motor controlled by fl ux weakening at high speed, followed by a system simulation veri fi cation of the results by using Matlab/Simulink. The simulation results show that the fl ux weakening control method can effectively reduce the steering wheel torque and improve the motor speed.
EPS;PMSM;lead angle fl ux weakening control;id=0 control
U463.44
A
1673-9833(2017)05-0072-06
10.3969/j.issn.1673-9833.2017.05.012
2017-05-01
湖南工业大学研究生科研创新基金资助项目(CX1706)
吴煌辉(1991-),男,江西九江人,湖南工业大学硕士生,主要研究方向为电动助力转向系统,E-mail:1044339062@qq.com
(责任编辑:申 剑)
