基于DSP的能量回馈系统在电动汽车中的应用仿真
2017-12-18邓木生
陈 军,邓木生
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
基于DSP的能量回馈系统在电动汽车中的应用仿真
陈 军,邓木生
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
车辆驱动电机由电动状态突然转入制动状态时会有强大的冲击电流进入蓄电池,这种情况会对蓄电池造成极大伤害。为解决此类问题,设计了带有DC/DC变换器的再生制动能量回馈系统。系统以TI公司的TMS320 DSP作为硬件设计的处理器,主电路、控制电路、驱动电路以及检测电路等为外围电路,并以直流无刷电机(BLDCM)作为被控对象,搭建了电路仿真模型。仿真调试结果表明,将超级电容并联在电池两端共同作为储能元件,能够避免大电流对电池的冲击,延长其使用寿命;且汽车爬坡或突然加速时,该系统也能够及时做到动力补偿,满足动能需求。可见,该系统设计能够很好地回收制动能量。
DSP;超级电容;DC/DC变换器;能量回馈系统
0 引言
电动汽车作为新型能源动力汽车,以其无污染、节能而深受大众喜爱。然而它并没有得到迅速、大规模地推广,究其原因是其性能比不上燃油汽车。蓄电池作为电动汽车的主电源,储存的电能有限,很大程度上限制了汽车的续航里程。而且频繁的充放电和制动时的大电流冲击对电池的使用寿命有极大影响[1]。再者,车辆爬坡或加速时,蓄电池不能瞬间大功率放电会导致车辆动力不足等问题。汽车在行驶过程中,要不断地加速、恒速、制动。尤其是在交通拥挤的城市,有30%~50%的能量被消耗在汽车制动上。能量回馈制动系统是一种非常有效的节能方法,大大提高了汽车的能量利用效率。
为解决以上问题,本课题组提出将超级电容、DC/DC变换器并联在蓄电池两端以组成复合电源,共同传输电能[2-3]。超级电容[4-6]具有快速充放电的功能,而DC/DC变换器处在蓄电池与超级电容双电源之间,这使得两者的输出电压更加稳定。具体的能量供应模式如下:当车辆制动时,DC/DC变换器处于降压变换状态,超级电容接收瞬间大电流,而且一次性储存的电量要远大于蓄电池的;爬坡、加速时,DC/DC变换器处于升压变换状态,超级电容将能量及时释放到电路中以驱动电机快速运转,克服了汽车在瞬间加速时动力不足的缺点;车辆稳定运行时,由蓄电池释放电能。
1 能量回馈制动原理
本研究中,基于数字信号处理(digital signal processing,DSP)搭建车辆行驶控制系统,并且以直流无刷电机作为控制对象。刹车时,车辆由电动转换为制动状态,处理器一方面根据转子位置传感器按照相应的换向逻辑发出一定占空比的脉冲宽度调制(pulse width modulation,PWM)信号,这些信号可驱动控制功率管,以保证电机转矩与功率的输出;另一方面,处理器根据反馈来的电压、电流信号计算输出的PWM信号,驱动控制DC/DC变换器[7-10]中的功率开关管,降低变换器的输出端电压(即降压变换),此时大电流进入超级电容两极板,系统处于能量回馈状态。
电动汽车超级电容充放电原理如图1所示。
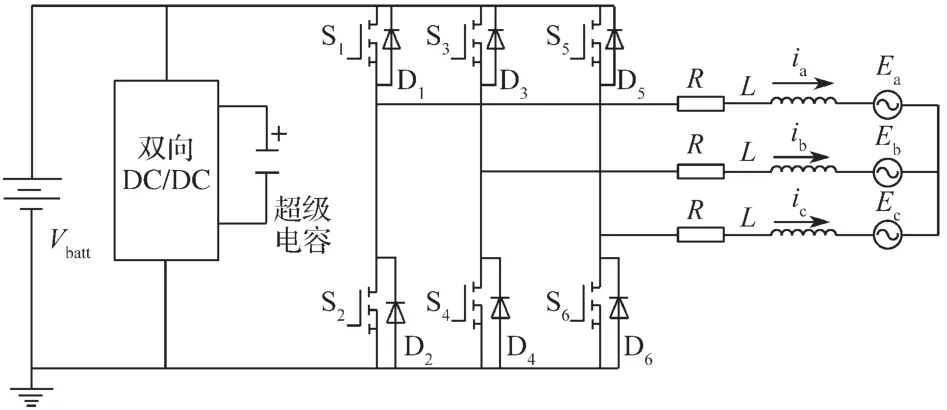
图1 超级电容充放电原理图Fig. 1 Super capacitor charging and discharging diagram
车辆制动控制的数学模型如下:因减速制动时,所需要的制动力矩很小,此时系统采用半桥调制方式[11],因而能够快速地实施控制响应,且制动能量回馈效率更高。
1.1 续流阶段
此阶段下,S4导通,为电流提供了续流通道。制动产生的电能储存在三相绕组的电感中,与Ea一起经D2构成回路,即有
式中:Ea、Eb分别为电机定子A相、B相电势;
E为反电动势的最大值。
同时,存在一条通向D6流向C相的电流通道,此时有Eb>Ec,定子C相电势Ec的表达式为

式中,θ为电机转过的电角度,其值可由如下公式计算得出:

其中,P为电机极对数,n为转速,t为时间。
无刷直流电机[12-15]的三相绕组采用星形连接,那么它们之间的电流关系如下:

根据基尔霍夫电压定律,可以得出系统的电压平衡方程如下:

式(2)~(3)中:R为相电阻;
L为绕组合成电感;
ia、ib、ic分别为电机定子A、B、C相的相电流。
综合式(1)~(3)可以得出

求解式(4)可得回馈电流表达式,为

式中I0为Ib的初始值。
1.2 回馈阶段
功率管S4关断,三相绕组存储的能量和电机反电动势一起给蓄电池充电,回馈电路有:经D2流向A相,过D3回馈到电池;经D6流向C相,过D3回馈能量。
由基尔霍夫电压定律可以得出如下方程:


式中Ud为直流侧电压。
综合公式(1)(6)(7),可推导得

由式(8)可得到回馈电流ib(t):

式中:ib0为ib的初始值;
t1为续流时间。
1.3 PWM占空比与能量回馈的关系
电动状态下,能量储存在电感中;续流状态时,电感将储存的能量通过续流二极管全部消耗在电路中[16],以此建立如下公式:

T为周期;
i′为电机制动时的电流。
由式(10)变形,可以推导出制动电流i′的计算公式,即

由于制动电流i′是负数,所以可得出系统能量回馈条件如下:
在一个周期内,制动电流能够向蓄电池回馈的最大能量Wmax为

比较式(13)和(14)可以看出,回馈能量W随着PWM占空比的增大而减小。
2 控制系统硬件设计
控制系统硬件设计电路如图2所示。
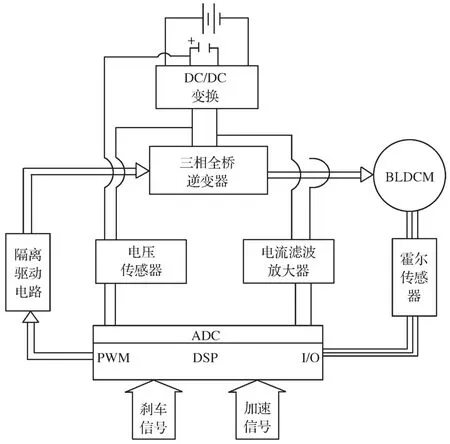
图2 控制系统硬件结构Fig. 2 Hardware structure of the control system
如图2 所示,外部输入信号输入到主控电路后,其内部的AD模块将信号进行转换。处理器依据控制算法发出PWM脉冲信号,经驱动电路隔离放大后控制逆变电路中各功率管的有序导通,控制电机工作。其中,控制电路由DSP最小系统和外部信号输入组成,包括加速信号、刹车信号、霍尔信号等。
2.1 处理器的性能和作用
DSP作为一种微处理器,有些外部模拟信号先通过AD转换模块转换为数字信号0和1,再被芯片处理。其运算速度可达每秒数千万条指令程序,具有很强大的处理功能,主要包括采集电路中电压/电流信号、转子位置传感器信号、刹车或加速信号等。输入的信号被转换、计算后,处理器依据控制策略发出PWM脉冲,实现脉宽调制,控制功率单元,完成四现象逆变器输出电流的控制以及对电机的实时调速。另外,在主控制器外围还装备有适合电力电子控制的各种外设模块。
2.2 信号处理
对采样的加速踏板和刹车踏板电流、转子位置传感器、直流母线电流电压、超级电容电压、蓄电池电压等信号,经各控制模块电路的滤波、稳压、降频调制后,送入DSP的模数转换通道,通过AD转换,被处理器所获取。
AD转换模块采用的芯片是AD7606,其工作原理如下:
1)通过8个输入通道V1~V8采集外部电压电流信号和电动机转子信号;
2)配置端口PAR/SER/BYTE SEL为高电平、DB15为低电平,使其为串行输入,从DB7输出信DOUTA;
3)将信号DOUTA经过数字隔离器ADUM7643后传给CPU,CPU通过SPI协议配置ADUM7643的内部寄存器,实现控制器以及电机模拟数据的传输等工作。
2.3 隔离驱动电路
隔离驱动电路选用IR公司的IR2136模块[17]和IR2101模块。其中,IR2136模块的高端工作电压可达500 V,输出电源端电压为10~20 V,工作频率达500 kHz。它具有故障电流自保护功能,当电流过大时,可关闭6路驱动输出。图3和4所示两种电路的功能分别为对处理器输出的6路和2路PWM脉冲信号进行隔离保护以及增压控制。
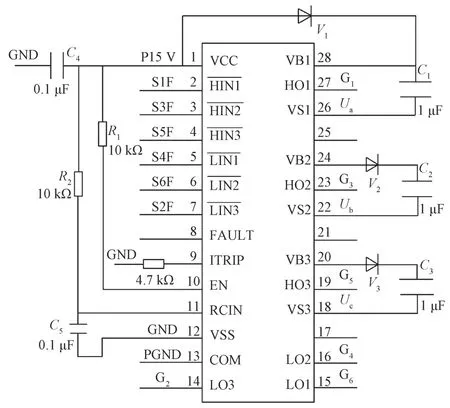
图3 IR2136隔离驱动电路Fig. 3 IR2136 isolation drive circuit
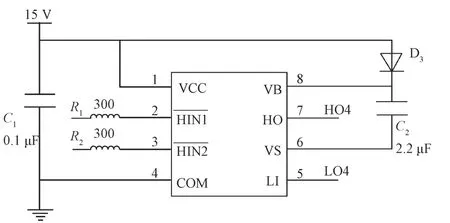
图4 IR2101隔离驱动电路Fig. 4 IR2101 isolation drive circuit
2.4 串行通信接口电路设计
本设计中系统的通信接口由RS232和CAN构成,其中SCI接口采用收、发双线异步通信。由于处理器与PC机要进行实时通信,确定处理器的电平范围为0~3.3 V,而PC机的电平范围为-12~+12 V,因而它们之间的电平无法匹配,所以需要经过模块转换,本研究选用MAX232芯片对其进行转换。MAX232芯片是一种双组驱动/接收器,其输入电压为+5 V,且其外围电路串联有分压电阻,经过分压处理后,降为3.3 V。此时的芯片通过管脚与处理器直接相连,进行通信。
具体的串行通信接口电路如图5所示。
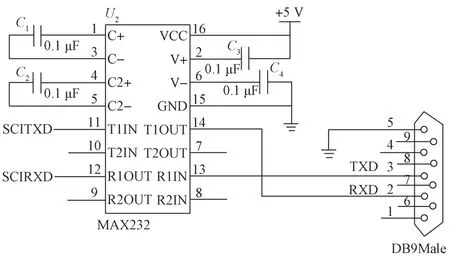
图5 串行通信接口电路Fig. 5 Serial communication interface circuit
3 控制器软件设计
本设计中控制器的软件部分即主程序流程如图6所示。

图6 主程序流程图Fig. 6 Flow chart of the main program
主程序模块先进行变量、A/D转换器、定时器的初始化工作。完成初始化后,霍尔传感器检测转子在运动过程中的位置,将接收到的磁极位置信号转换成电信号。在1个周期内,系统判断磁场位置是否按照指定方式运行,当定时器达到预期数值后,处理器读取各个输入信号,经过内部控制算法,输出功能指令。若程序没有结束,则进入下一个循环,其主要功能是响应定时器中断,调用程序。
4 仿真分析
为了更直观地显示出系统性能,在Simulink中搭建模型,对电动汽车从启动加速到稳定运行、实施制动等的整个过程进行仿真。在系统中,超级电容和DC/DC变换器并联到蓄电池上,蓄电池通过反向二极管和限流电阻并联到直流母线上,母线通过逆变器控制电机。电机加速启动时,由超级电容提供瞬时峰值功率。电机匀速转动时,蓄电池提供能量。当电机制动时,动能转换为电能,电能经过逆变器和直流母线后大量储存到超级电容中,少部分存储到蓄电池。所得直流无刷电机PWM控制制动回馈仿真波形如图7所示。

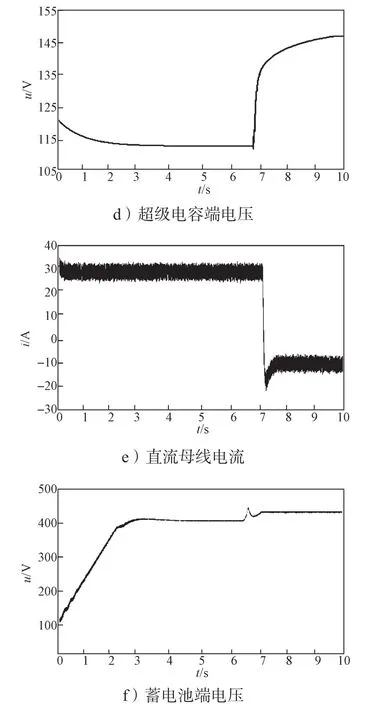
图7 直流无刷电机PWM控制制动回馈仿真波形Fig. 7 DC brushless motor PWM control brake feedback simulation waveforms
由图7a所示电机转速仿真结果曲线可以得知,系统仿真时间为10 s;电机在0~2.3 s为加速启动阶段,该时段内电机转速由0 r/min上升至4 600 r/min;2.3~6.8 s为恒速行驶阶段,即电机转速恒定在4 600 r/min;6.8 s后为制动减速阶段,电机转速从4 600 r/min在短时间内(2.2 s左右)下降到0 r/min ,可见转速按照设定的速率下降。
由图7b所示定子电流仿真曲线可以得知,电机在刚刚启动时,定子电流的幅值波动较大,在20 A左右;当电机匀速转动时,电流幅值稳定在4 A;当系统运行到6.8 s后,电机制动,输出转矩变大,电流也随之变大[18],再次出现较大的幅度波动,电流波动幅值在18 A左右。
电机被加速驱动时,经DC/DC变换器调节,超级电容以大电流形式放电给直流母线,其端电压值会稍微降低,而直流母线电压在短时间内由0 V快速升高到400 V,如图7c所示,结合功率管的导通和关断,使电机在短时间内快速转动。
电机制动时,定子电流值增大,经过PWM控制调节,当母线侧电压高于电容侧时,电流流向超级电容[19],导致电容端电压值出现了较大幅度的增长,如图7d所示。
由图7e所示直流母线电流曲线可以看出,车辆正常运行时,蓄电池供应能量,直流母线电流为正,在30 A左右;而电机制动时,电流方向相反,在-20 A左右。
电机制动过程中,由于超级电容能存储大量的能量,因而蓄电池可以避免大电流冲击带来的危害。另外,制动时蓄电池吸收了少量能量,导致其端电压有所升高,如图f所示。
5 结语
本研究中提出了一种通过处理器内部逻辑算法完成对车辆电动和制动状态的切换与控制的方法。仿真结果表明该方法简单实用,所设计的控制系统可以保证在电动情况下,蓄电池能正常释放电能;在制动情况下,能量能回馈给蓄电池。尤其是在回馈能量上,一方面,采用超级电容组合成复合电源,避免了大电流对蓄电池的冲击破坏;另一方面,大大提高了车辆的续航里程,具有现实开发意义。仿真调试结果证明了此系统可以达到电机快速响应和能量回馈的设计目的。
[1] 邱 静,汤 峰. 电动汽车能量控制策略研究[J]. 合肥学院学报(自然科学版),2013,23(2):67-70.QIU Jing,TANG Feng. Study on Energy Control Strategies of Pure Electric Bus[J]. Journal of Hefei University (Natural Sciences) ,2013,23(2):67-70.
[2] 马国清,任桂周. 一种城市电动公交客车制动能量回馈方法[J]. 华中科技大学学报(自然科学版),2015,43(7):58-61.MA Guoqing,REN Guizhou. Novel Regenerative Braking Method for Electric City Bus[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition) ,2015,43(7):58-61.
[3] 潘 峰,赵金国,游松超,等. 电动汽车回馈制动发电储能装置控制电路[J]. 微特电机,2015,43(3):78-80,85.PAN Feng,ZHAO Jinguo,YOU Songchao,et al.Control Circuit of Regenerative Braking Energy Storage Device for Electric Vehicle[J]. Motor,2015,43(3):78-80,85.
[4] 闫文龙,付成伟. 电动汽车运行模拟及超级电容能量回收系统设计[J]. 现代电子技术,2014,37(21):142-144,148.YAN Wenlong,FU Chengwei. Simulation of Electric Car and Design of Energy Recovery System with Super-Capacitor[J]. Modern Electronics Technique,2014,37(21):142-144,148.
[5] 杨 寅,熊 鹏,陈统卓,等. 基于超级电容的电动车制动能量回收技术研究[J].电子技术应用,2009(3):73-76.YANG Yin,XIONG Peng,CHEN Tongzhuo,et al.Study on a Regenerative Brake for Electric Bicycle Based on Ultracapacitor[J]. Application of Electronic Technique,2009 (3):73-76.
[6] 张玉龙,朱品昌,俞建军,等. 超级电容在汽车制动能回收中的应用研究[J]. 电子测试,2016(10):112-114.ZHANG Yulong,ZHU Pinchang,YU Jianjun,et al.The Application of Super Capacitor in the Car Braking Energy Recycling[J]. Electronic Test,2016 (10):112-114.
[7] 周美兰,田小晨. 用于电动汽车的交错并联软开关双向DC/DC变换器[J]. 哈尔滨理工大学学报,2016 (4):83-89.ZHOU Meilan,TIAN Xiaochen. An Interleaved Soft-Switching Bidirectional DC/DC Converter in Electric Vehicles[J]. Journal of Harbin University of Science and Technology,2016(4):83-89.
[8] 丁惜瀛,于 华,李 健,等. 基于模糊PI控制的电动汽车双向DC/DC变换器[J]. 大功率变流技术,2012(1):13-16,43.DING Xiying,YU Hua,LI Jian,et al. The Electric Vehicle Bi-Directional DC/DC Converter Base on Fuzzy PI Control[J]. High Power Converter Technology,2012(1):13-16,43.
[9] 王明渝,邓湘鄂,马 伟,等. 一种用于电动汽车的多重软开关双向DC/DC变换器[J].汽车工程,2011(12):1073-1077,1083.WANG Mingyu,DENG Xiang’e,MA Wei,et al.A Multiple Soft-Switching Bi-Directional DC /DC Converter for Electric Vehicles[J]. Automotive Engineering,2011 (12):1073-1077,1083.
[10] 张承宁,孙逢春,张 旺. 电动汽车DC-DC电源变换器的原理、建模和控制[J]. 北京理工大学学报(英文版 ),2000(4):465-471.ZHANG Chengning,SUN Fengchun,ZHANG Wang.Principle, Modeling and Control of DC-DC Convertors for EV[J]. Journal of Beijing Institute of Technology(English Edition),2000(4):465-471.
[11] 周美兰,孙宏达,赵 强. 纯电动汽车半桥斩波式能量回馈控制[J]. 黑龙江大学自然科学学报,2015(4):538-544.ZHOU Meilan,SUN Hongda,ZHAO Qiang. Energy Feedback Control of Half Bridge Chopper of Pure Electric Vehicles[J]. Journal of Natural Science of Heilongjiang University,2015(4):538-544.
[12] 朱洪雨,张东来,王子才,等. 混合动力客车用大功率无刷直流电机电动及再生制动研究[J]. 电气传动,2016,46(5):3-6.ZHU Hongyu,ZHANG Donglai,WANG Zicai,et al.High-Power BLDC Drive and Regenerative Braking for HEV[J]. Electric Drive,2016,46 (5):3-6.
[13] 李兴全,李 博. 电动汽车用直流无刷电机能量回馈研究[J]. 科技传播,2012(21):31-32.LI Xingquan,LI Bo. Study on Energy Feedback of Brushless DC Motor for Electric Vehicle[J]. Public Communication of Science & Technology,2012(21):31-32.
[14] 潘在河,严卫生,赵 涛,等. ARM在无刷直流电机控制系统中的应用[J]. 机械与电子,2009(1):37-40.PAN Zaihe,YAN Weisheng,ZHAO Tao,et al. Application of ARM in Brushless DC Motor Control System[J].Machinery and Electronics,2009 (1):37-40.
[15] 宋 哲,王友仁,鲁世红,等. 一种电动车用无刷直流电机混合回馈制动控制方法[J].电工技术学报,2016,31(6):74-80.SONG Zhe,WANG Youren,LU Shihong,et al. A Hybrid Regenerative Braking Control Method of Brushless DC Motor for Electric Vehicles[J]. Transactions of China Electrotechnical Society,2016,31(6):74-80.
[16] 成 立,奚家健,李 宁. 一种半/全桥PWM切换策略电动车能量回馈法[J]. 江苏大学学报(自然科学版 ),2013,34(3):304-308.CHENG Li,XI Jiajian,Li Ning,et al. A Half / Full Bridge PWM Switching Strategy for Electric Vehicle Energy Feedback Method[J]. Journal of Jiangsu University (Natural Science Edition),2013,34(3):304-308.
[17] 秦文甫,张昆峰. 基于IR2136的无刷直流电机驱动电路的设计[J]. 电子设计工程,2012,20(9):118-120.QIN Wenfu,ZHANG Kunfeng. Design of Driver Circuit for BLDCM Based on IR2136[J]. Electronic Design Engineering,2012,20(9):118-120.
[18] 查鸿山,宗志坚,刘忠途. 电动汽车能量回馈制动仿真研究[J]. 机械科学与技术,2012,31(4):572-577.ZHA Hongshan,ZONG Zhijian,LIU Zhongtu. Simulation Investigation into the Electric Vehicle’s Regenerative Braking[J]. Mechanical Science and Technology for Aerospace Engineering,2012,31(4):572-577.
[19] 丁石川,陈 权,薛钟兵,等. 智能电动汽车充放电技术分析与仿真研究[J]. 电气应用,2013,32(9):24-28,63.DING Shichuan,CHEN Quan,XUE Zhongbing,et al. Analysis and Simulation Research of Intelligent Electric Vehicle Charging and Discharging Technology[J].Electrical Applications,2013,32(9):24-28,63.
Application Simulation of Energy Feedback System Based on DSP in Electric Vehicles
CHEN Jun,DENG Musheng
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
When the motor of the vehicle is switched from the motoring state to the braking state, there will be a strong impact current entering the battery, which will cause great damage to the battery. To solve this problem, a design has been proposed for the regenerative braking energy feedback system with DC/DC converter. By adopting TI’s TMS320 DSP as the processor of its hardware design, the main circuit, control circuit, driving circuit and detection circuit for its peripheral circuit, and the brushless DC motor (BLDCM) as the object, a circuit simulation model of the system has thus been built. The simulation test results show that with the super capacitor connected in parallel with each other at both ends of the battery as an energy storage element, it can avoid the impact of the current to the battery and prolong its service life. In a state of uphill climbing or sudden acceleration, the system of the vehicle can also make dynamic corresponding compensation to meet the demand of kinetic energy, thus verifying the high ef fi ciency of the system in recovering the braking energy.
digital signal processing;super capacitor;DC/DC converter;energy feedback system
TM531;U469.72
A
1673-9833(2017)05-0052-07
10.3969/j.issn.1673-9833.2017.05.009
2017-04-30
陈 军(1989-),男,河南商丘人,湖南工业大学工程师,硕士生,主要研究方向为现代电力电子技术及系统,E-mail:273733820@qq.com
(责任编辑:廖友媛)