六相无刷直流电机控制系统的建模与仿真
2017-12-18王欣,梁辉,秦斌,陈颖
王 欣,梁 辉,秦 斌,陈 颖
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
六相无刷直流电机控制系统的建模与仿真
王 欣,梁 辉,秦 斌,陈 颖
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
通过分析六相永磁无刷直流的基本工作原理,推导其电压方程、反电动势方程、转矩和运动方程,并建立相关数学模型。根据建立的数学模型在Matlab/Simulink环境下搭建控制系统仿真模型。仿真结果验证了系统控制的正确性和可行性,为实际多相无刷直流电机控制系统的研究和设计提供依据。
六相无刷直流电机;换相原理;控制系统
0 引言
永磁无刷直流电机(permanent magenetic brushless DC motors,PMBLDCM)具有结构简单、体积小、无需机械换相装置、运行效率高、调速性能好,启动时间短、启动转矩和制动转矩大、可靠性高、维护周期长等优点,因而在各个领域中都得到了广泛的应用[1],由于各种场合对电机的要求不同,多相永磁无刷直流电机应运而生。
无刷直流电机的相数较多,导致其换相信号较多,电流电压方程、反电动势方程以及转矩和运动方程相对较复杂,从而提高了对控制系统的控制要求。其中反电动势可通过由转子位置变化而引起绕组电感变化的模块来获取,但当引起的电感变化较小时,该方法不适用。反电势也可由有限元法获取,但该方法会对仿真速度产生较大影响[2]。在较多文献中,无刷直流电机仿真模型中电机给定转速是一定值,不能较好地体现转速的跟踪性能。本文在分析无刷直流电机的基本工作原理和数学模型的基础上,提出了一种无刷直流电机控制系统的仿真模型。在该模型中,对反电势采用线性分段法实现,对电源和逆变电路模块直接采用Simulink中直流电源和三相逆变桥模块,该仿真采用双闭环控制,速度环采用PI控制,电流环采用滞环控制,在仿真过程中,电机转速按一定加/减速度变化,且电机并不是一直都是六相运行,可进行三/六相切换。
1 六相永磁无刷直流电机工作原理
永磁无刷直流电机利用转子位置传感器获取转子位置信息来确定绕组的导通状态,从而产生持续的电磁转矩,使电机稳定运行[3-4]。以下结合转子位置的变化来分析六相无刷直流电机的基本工作原理。
系统工作过程如下:控制电路对霍尔传感器检测到的转子位置信号进行逻辑变换,产生可控的12路驱动信号,控制逆变器功率开关管的导通状态,进而控制电机按某一固定方向运转[2]。
课题组研究的六相永磁无刷直流电机可实现三/六相运行。当电机三相运行时,只有其中一套三相绕组工作;当电机六相运行时,两套三相绕组同时工作,其工作原理如下所述。磁动势和转子位置如图1所示,逆变电路如图2所示。
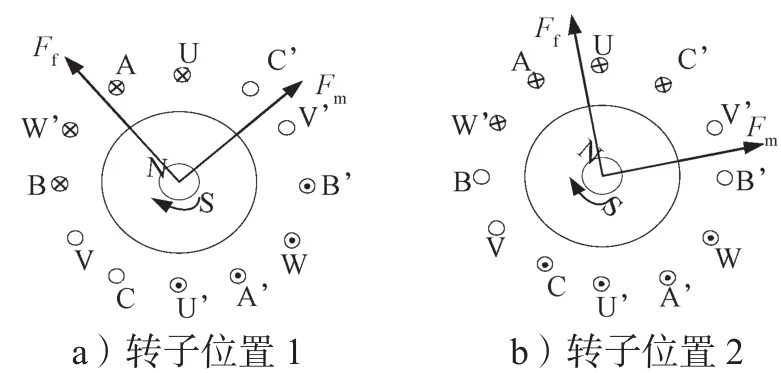
图1 磁动势和转子位置图Fig.1 Position diagram of magneto-motive force and rotors
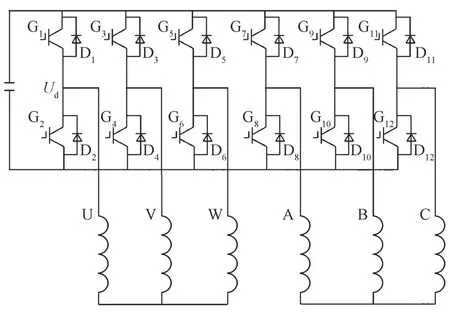
图2 逆变电路Fig. 2 Inversion circuit
当转子在如图1a所示位置时,为使转子继续运转,则定子绕组产生的合磁动势必须与转子磁动势形成一个夹角,这样才能拖动转子继续运转,因此此时需要U、W、A、B相导通,而控制逆变电路的开关管G1、G6、G7、G10导通时,U、W、A、B相导通,如图2所示,其中控制开关管导通与关断的信号是转子位置传感器输出信号经过逻辑处理后的信号。当U、W、A、B相导通时,定转子的磁通势Ff和Fm如图1a所示,定转子磁场相互作用产生的电磁转矩带动转子顺时针转动。
当转子转动30°电角度时,开关管G1、G6、G7、G12导通,则U、W、A、C相导通,定转子磁动势Ff和Fm的状态如图1b所示,定转子磁场相互作用产生的电磁转矩使得永磁转子继续顺时针转动。以此类推,转子沿顺时针方向每转过30°电角度,逆变电路相应的开关管导通状态发生一次改变,绕组在整个周期内的导通顺序为UWAB— UWAC—VWAC—VWBC—VUBC—VUBA—WUBA—WUCA—WVCA—WVCB—UVCB—UVAB—UWAB,转子始终沿顺时针方向转动。
2 六相永磁无刷直流电机的数学模型
六相永磁无刷直流电机在静止坐标系下建立数学模型,为方便数学分析和建模给出如下假设:
1)转子永磁体产生的气隙磁场为方波,六项绕组反电动势为梯形波;
2)忽略定子绕组电枢反应的影响及电枢绕组间的互感;
3)电机气隙磁导均匀,磁路不饱和[4]。
2.1 电压方程
六相绕组可等效为两套空间相差30°的三相绕组,而每相定子绕组可等效为电感、电阻和反电动势的串联,设R1、R2、L1、L2分别为两套三相绕组的相电阻、相电感,EU、EV、EW、EA、EB、EC为两套三相绕组的反向电动势,iU、iV、iW、iA、iB、iC为两套三相绕组的相电流,UU、UV、UW、UA、UB、UC为两套三相绕组的相电压,则其电压方程为

2.2 反电动势方程和电磁转矩运动模块
无刷直流电机的反电动势大小与定子绕组匝数和电机转速有关,其电动势方程为

当电机型号确定后,其各项系数也随之确定,则电机反电势的幅值与转速成正比,其波形为一个120°平顶宽度的梯形波,其反电动势系数ke为

反电势方程为

式中ω为机械角速度。
在电机运行过程中,电磁转矩方程为

机械运动方程为

式中:TL为负载转矩;f为阻尼系数;J为转动惯量。
3 无刷直流电机控制系统Simulink仿真模型搭建
根据上述数学模型,在Matlab/Simulink环境下搭建无刷直流电机控制系统仿真模型,为了适应一些复杂的控制系统,该模型采用速度电流双闭环控制,因为电流速度双闭环控制具有良好的启动、调速性以及抗干扰性[5-7],其控制系统结构框图如图3所示。

图3 控制系统结构框图Fig. 3 Structure diagram of the control system
3.1 电压方程模块
根据电压方程(1)~(2),在Matlab下建立如图4所示的模型。
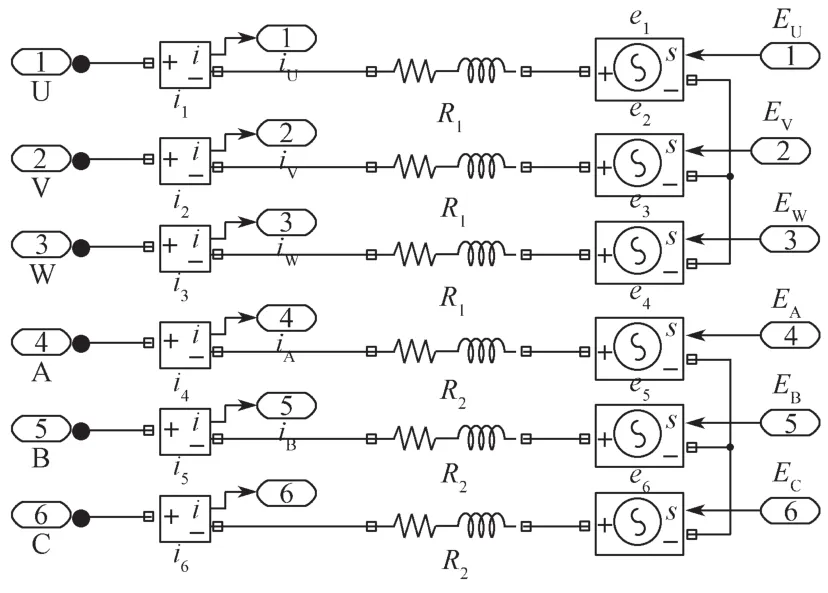
图4 六相绕组等效模块Fig.4 Six-phase winding equivalent modules
其中U、V、W三相互成120°电角度,A、B、C三相互成120°电角度,且A相滞后U相30°电角度,每相绕组用电感、电阻和反电动势的串联进行等效,反电动势用受控电压源等效,两套三相绕组进行星型连接。
3.2 电磁转矩和速度计算模块
根据方程(6)可以搭建电磁转矩模块,根据(7)搭建速度计算模块,两个模块的搭建如图5所示。
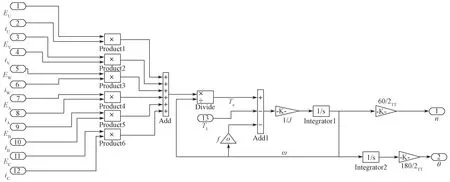
图5 电磁转矩和速度计算模块Fig.5 Electromagnetic torque and speed calculation modules
将六相不对称绕组等效模块中测量的绕组相电流作为此模块中的输入电流,此模块中获取的转速n和机械角度θ可用于求取电机反电势和逻辑换相信号。
3.3 反电动势模块
当转子转速一定时,定子绕组反电动势为梯形波,其平顶宽度为120°[8]。设ke1、ke2为反电动势系数,n为转子转速,θ为转子机械角度,则转子电角度 θm=Pθ,转子位置角度 θpos=θm- fi x(θm/2π)×2π。绕组反电势是以T=2π为周期的梯形波函数,则可以求取反电动势表达式,以U相为例:

由式(8)可知电机绕组反电动势为一个分段函数,则U、V、W、A、B、C相绕组可用S-Function模块来实现,U、A、V、B、W、C相绕组电动势相位依次相差30°,U、V、W三相的反电动势系数为ke1,A、B、C三相的反电动势系数为ke2。
3.4 逻辑换相模块
换相逻辑如表1所示。由表1可知逆变电路开关管的导通状态与转子位置有关,当转子每转过30°电角度,位置传感器的输出发生一次改变,将位置传感器的输出信号进行逻辑处理便可得到逆变电路开关管的导通状态,由表可知当位置传感器输出发生改变时,逆变电路开关管导通顺序也随之发生一次改变,故根据此规律可以利用S-Function函数来模拟生成换相逻辑信号。
3.5 控制器模型
控制器模型如图6所示。
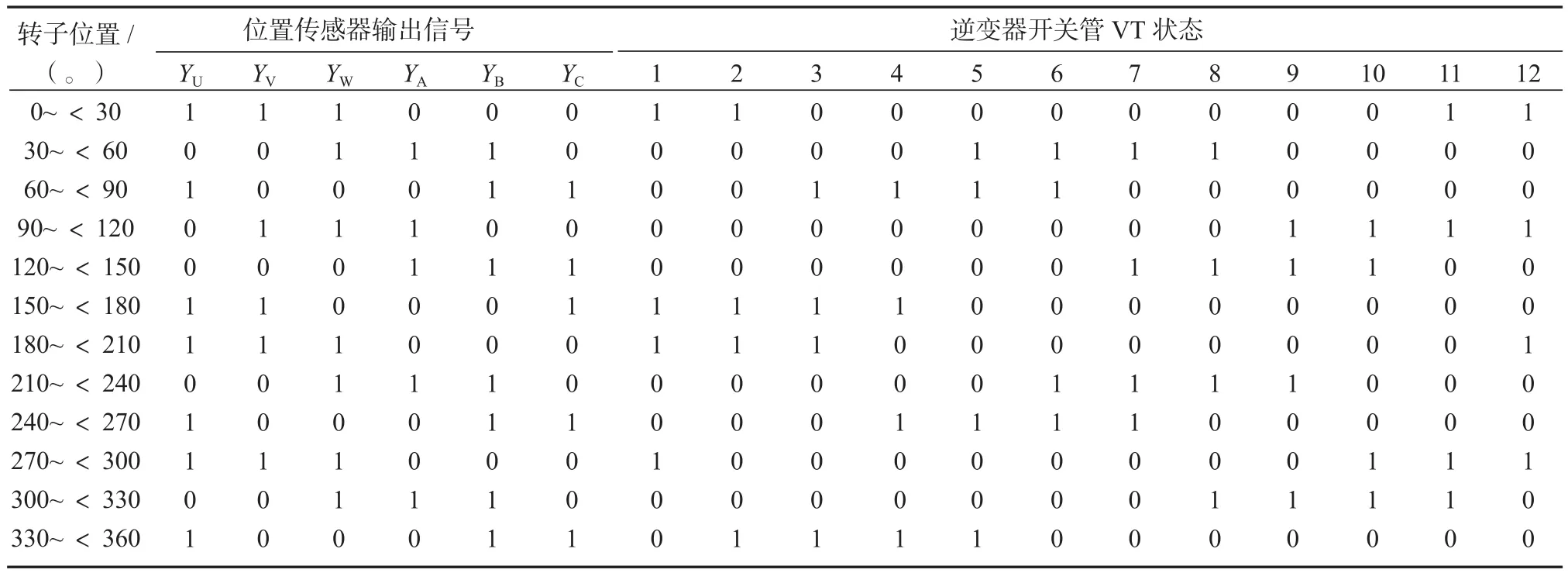
表1 换相逻辑Table 1 Commutation logic

图6 控制模块Fig. 6 Control modules
本无刷直流电机控制系统采用电流速度双闭环 控制,速度环采用PI调节器进行调节,将给定转速与反馈的实际速度的差值作为速度PI调节的输入,速度PI调节器的输出为参考电流。电流采用滞环调节器,滞环调节器的输入为参考电流与实际电流的差值,输出为脉宽调制信号[9],将该脉宽调制信号与逻辑模块输出的逻辑信号进行逻辑“与”处理得到PWM控制信号,控制逆变电路开关管的导通状态。当速度超过某一值时电机采用六相绕组运行;当速度低于某一值时电机三相运行,也可启动人工控制三/六相运行切换。
图7为完整的无刷直流电机控制系统模型,左侧为逻辑处理、三/六相切换控制电路和双闭环控制电路,右侧为逆变电路和电机本体模块。
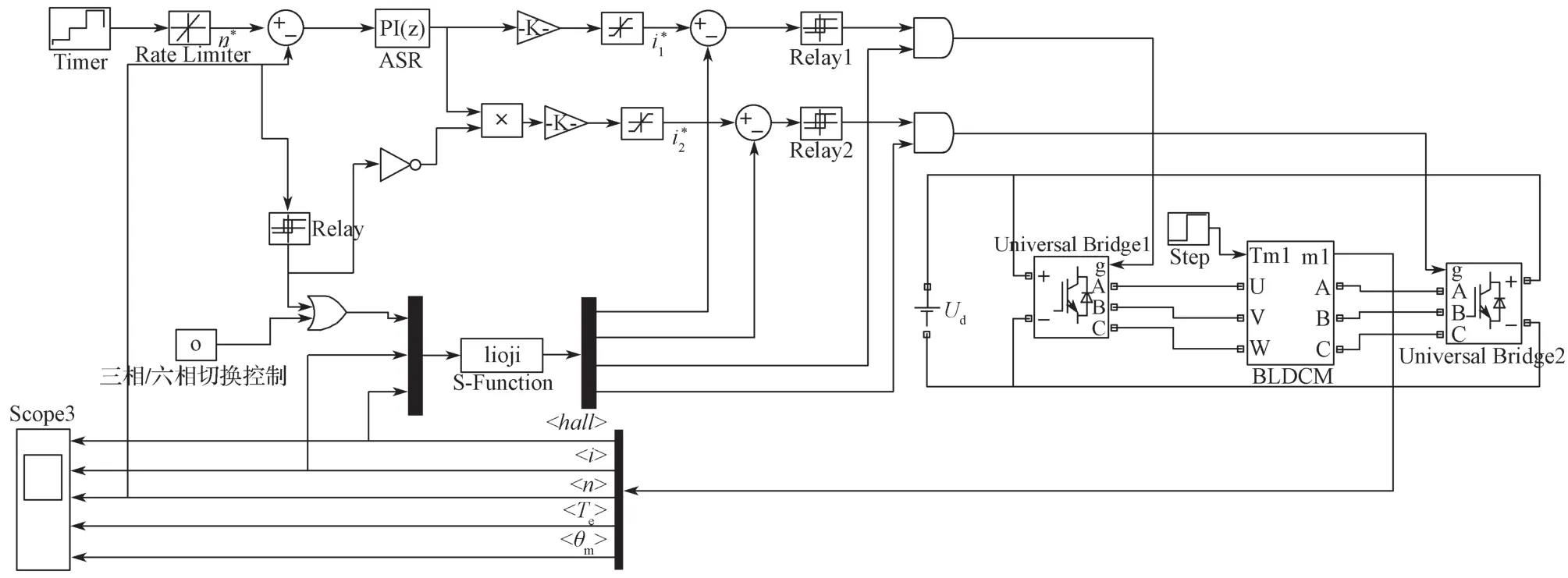
图7 无刷直流电机控制系统仿真模型Fig. 7 A simulation model of the brushless DC motor control system
4 仿真结果分析
利用上述建立的无刷直流电机控制系统模型进行仿真实验。其中电机模型的参数如下:R1=0.069 Ω,R2=0.16 Ω,L1=0.38 mH,L2=0.91 mH,P=4,J=0.124 kg·m2,ke1=6.02 V·r/min,ke2=9.27 V·r/min,额定转矩TL=70 N·m,直流电源电压Ud=440 V。
给电机加额定负载TL=70 N·m,给定转速是按照一定加/减速度来变化的,选好电机参数后,调整控制电路的各项参数,仿真结果如图8~11所示。
图8为转速仿真波形,给定的转速n是按照某一加/减速度来变化的,由图8转速仿真波形可以看出实际转速与给定转速基本一致,基本实现了转速的无差跟踪。
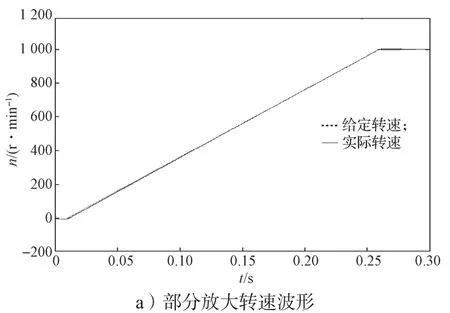

图8 转速仿真波形Fig. 8 Speed simulation waveform
图9所示为反电动势仿真波形。图9a、9b是U相和A相的整体反电势仿真波形。
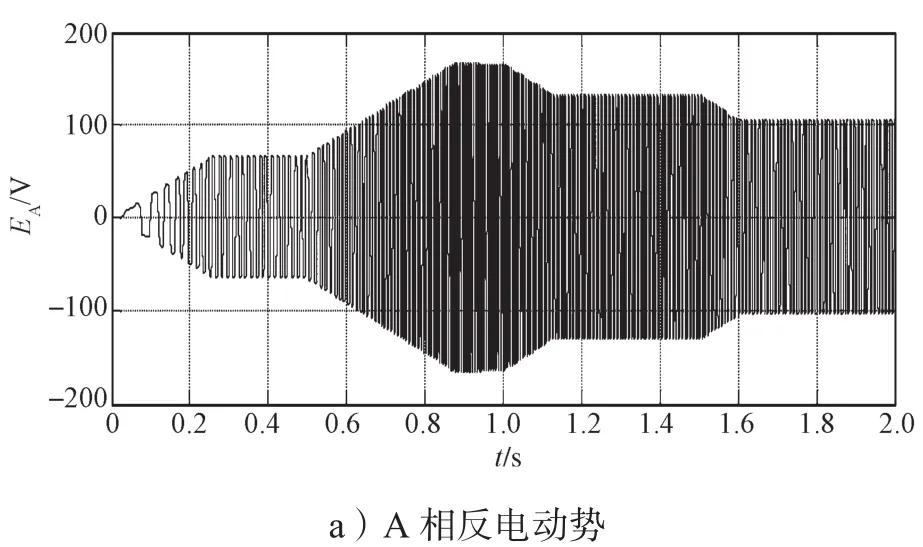
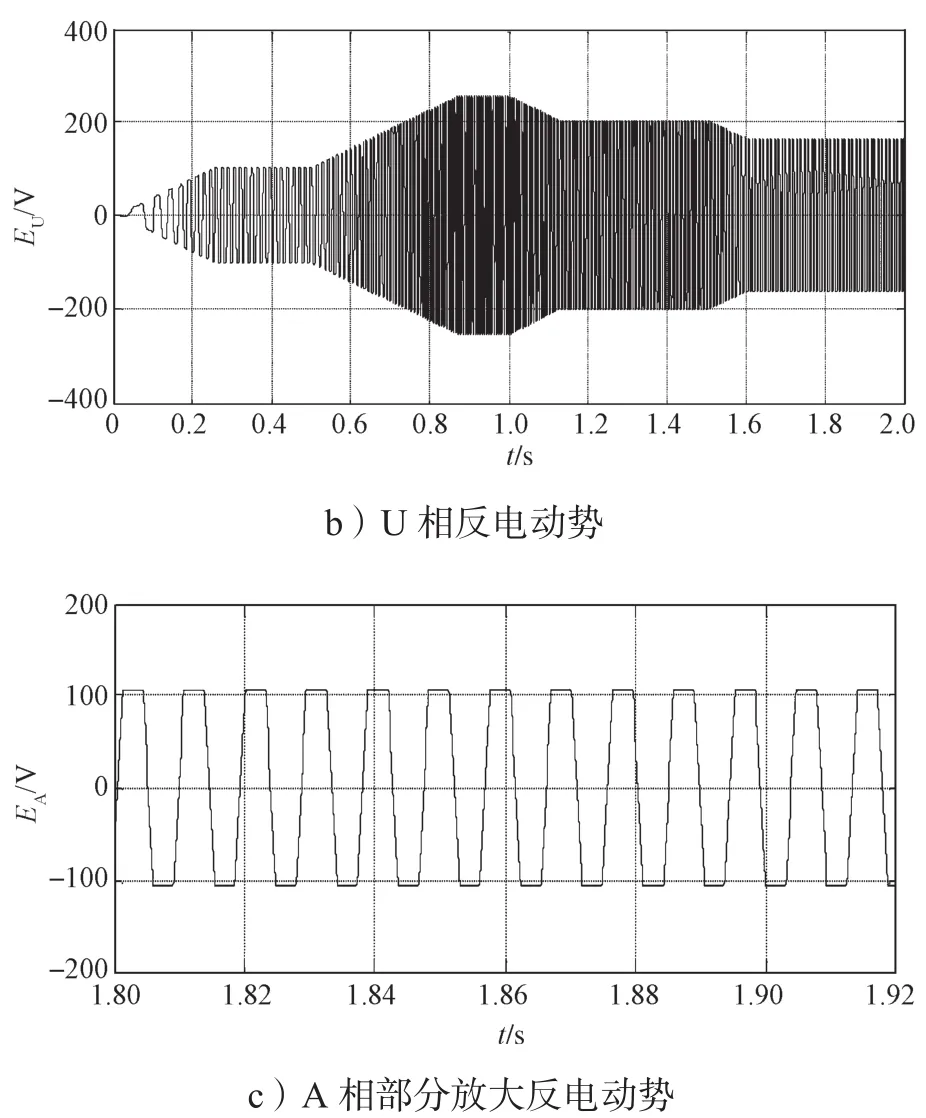
图9 反电动势仿真波形Fig. 9 Counter electromotive force simulation waveform
结合转速波形分析可以得知:当电机加速时,反电势增大;当转速一定时,反电势不再增大;当电机减速时,反电势在减小。以上结果验证了反电势与转速成正比。图9c是A相放大后的波形,是一个梯形波,刚好和反电势方程分析出波形一致。
图10为电流仿真波形,图10a、10b为U相和A相电流波形。


图10 电流仿真波形Fig. 10 Current simulation waveform
结合转速波形分析可知,最开始电机三相运行,A相电流iA为零;当电机加速到1 800 r/min时,A相绕组投入运行,电机进入六相运行;当电机减速到1 700 r/min时,电机自行断开高速绕组,A相电流iA又变为零。由此可知,电机基本实现了三/六相切换。
图11为电磁转矩波形,由转速波形可知电机转速是在以一定加速度或者减速度变化的,由此可以知道电机在运行过程中电磁转矩并不是一恒定值,而由图10可知,电磁转矩确实不是一恒定值,在电机加速阶段电磁转矩较大,相反,在电机减速阶段,电磁转矩较小。
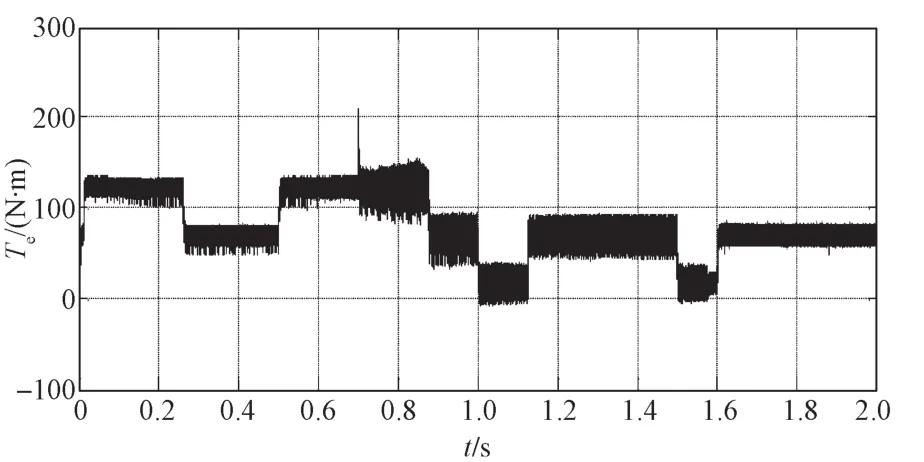
图11 电磁转矩仿真波形Fig. 11 Electromagnetic torque simulation waveform
5 结语
课题组分析了无刷直流电机工作原理,并建立数学模型,在此基础上搭建了六相永磁无刷直流电机双闭环控制系统模型,并进行了仿真实验。由实验结果分析可知,转速波形和电磁转矩波形验证了该系统能稳定运行,且具有较好的动静态性能,反电动势、相电流以及电磁转矩等的实验结果也与理论分析结果相符,验证了该模型搭建的正确性,为多相无刷直流电机的进一步研究提供了依据。
[1] YUE X,BAI P,YANG R,et al. Design of Control System for Three-Phase 8 Pole Brushless DC Motor[J].Application of Electronic Technique,2016,32:80-85.
[2] 刘 刚,王志强,房建成. 永磁无刷直流电机控制技术与应用[M]. 北京:机械工业出版社,2008:33-35.LIU Gang,WANG Zhiqiang,FANG Jiancheng.Permanent Magnet Brushless DC Motor Control Technology and Application[M]. Beijing:Mechanical Industry Press,2008:33-35.
[3] 付 磊. 基于DSP的无刷直流电机模糊控制系统设计和仿真研究[D]. 南昌:南昌大学,2008.FU Lei. Design and Simulation of Fuzzy Control System of Brushless DC Motor Based on DSP[D]. Nanchang:Nanchang University,2008.
[4] 曾光华,陈卫兵,邹豪杰,等. 基于STM32的无位置传感器无刷直流电机控制系统[J]. 湖南工业大学学报,2012,26(1):41-44.ZENG Guanghua,CHEN Weibing,ZOU Haojie,et al.Sensorless Brushless DC Motor Control System Based on STM32[J]. Journal of Hunan University of Technology,2012,26(1):41-44.
[5] 杨 燕. 舵用无位置传感器无刷直流电机控制器研究[D]. 西安:西北工业大学,2006.YANG Yan. Research on Sensorless Brushless DC Motor Controller[D]. Xi’an:Northwest Polytechnical University,2006.
[6] 廖 晖. 一种无刷直流电机调制方法及驱动的研究[D]. 杭州:浙江大学,2012.LIAO Hui. Research on Modulation Method and Driving of Brushless DC Motor[D]. Hangzhou:Zhejiang University,2012.
[7] 苏 礼,薛 彪. 基于Simulink的三相无刷直流电机控制系统的设计与仿真[J]. 黑龙江科技信息,2016(32):110-111.SU Li,XUE Biao. Design and Simulation of Three-Phase Brushless DC Motor Control System Based on Simulink[J]. Heilongjiang Science and Technology Information,2016(32):110-111.
[8] RONG J,LI Y.Modeling and Simulation of the Double-Closed Loop Control System of Counter Rotating Permanent Magnet Brushless DC Motor[C]// International Conference on Electronic and Mechanical Engineering and Information Technology. [S.l.]:IEEE,2011:3309-3313.
[9] 张新荣,张理伟,刘红平,等. 无刷直流电机基于线间反电动势的转子位置估计[J]. 长安大学学报(自然科学版 ),2016,36(1):105-111.ZHANG Xinrong,ZHANG Liwei,LIU Hongping,et al. Rotor Position Estimation Based on Line-to-Line Back-EMF for Brushless DC Motors[J]. Journal of Chang’an University(Natural Science Edition),2016,36(1):105-111.
[10] 张克涵,狄正飞,刘晓强,等. 基于Matlab无刷直流电机双闭环调速系统仿真研究[J]. 微电机,2015,48(2):44-48.ZHANG Kehan,DI Zhengfei,LIU Xiaoqiang,et al. Simulation and Research on Dual-Loop Regulating Velocity System of Brushless DC Motor Based on Matlab[J]. Micromotor,2015,48(2):44-48.
Modeling and Simulation of the Six-Phase BLDC Motor Control System
WANG Xin,LIANG Hui,QIN Bin,CHEN Ying
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
By analyzing the basic working principle of six-phase permanent brushless direct current motor, this paper seeks to derive from it the voltage equation, back electromotive force equation, torque and motion equation,followed by the establishment of corresponding mathematical models. Based on the established mathematical model,the simulation model of control system is built in Matlab/Simulink. The simulation results verify the correctness and feasibility of the system control, thus providing the basis for the research and design of practical multi-phase brushless DC motor control system.
permanent magnet brushless DC motor;commutation principle;control system
TM351
A
1673-9833(2017)05-0045-07
10.3969/j.issn.1673-9833.2017.05.008
2017-07-22
国家自然科学基金资助项目(61074067),湖南省科技计划基金资助重点项目(2014FJ2018),湖南省自然科学基金资助项目(13JJ3110)
王 欣(1971-),女,湖南株洲人,湖南工业大学教授,硕士生导师,主要从事复杂系统控制建模方面的研究,E-mail:wwangxin97@163.com
梁 辉(1991-),男,湖北黄冈人,湖南工业大学硕士生,主要研究方向为无刷直流电机控制,E-mail:18727610982@163.com
(责任编辑:申 剑)
