基于垂向载荷转移率的微型客车侧倾敏感性研究
2017-12-06李胜琴谭丽军
李胜琴,谭丽军
(东北林业大学 交通学院, 哈尔滨 150040)
基于垂向载荷转移率的微型客车侧倾敏感性研究
李胜琴,谭丽军
(东北林业大学 交通学院, 哈尔滨 150040)
在Matlab/Simulink软件环境下建立某微型客车三自由度侧倾模型,分析车辆结构参数、道路输入参数及驾驶员输入参数对车辆侧倾倾向性的影响。利用干路面蛇形试验数据对所建立的仿真模型进行验证,通过J-turn试验和鱼钩仿真试验(fish-hook)分析车速、转向盘转角对车辆侧向加速度、车身侧倾角等侧向稳定性输出参数的影响。同时提出动态垂向载荷转移率(VTRd)作为侧倾敏感性因数,分析车辆结构及运行参数对微型客车侧倾敏感性的影响。结果表明:悬架侧倾刚度对侧倾敏感性影响最为明显;结合驾驶员对转向盘转角的输入,车辆的侧倾变化趋势对车速的变化比较敏感,当车速增加到80 km/h以上时,较小的转向盘转角变化就会使车辆发生侧倾。
微型客车;动态载荷转移率;侧倾敏感性;单参数;虚拟试验
美国国家公路交通安全管理局(NHTSA)2012年的报告指出:在美国全部的单车交通事故中,侧翻只占约5%,所占的比重比较小,但由侧翻引起的死亡率却高达35%,在车内乘员都正确使用安全带的前提下,也会有约75%的致死率是由侧翻导致的[1]。由于客车侧倾事故的高致死率,美国国会通过法案,要求车辆出厂前必须进行动态抗侧倾评价试验,并将其作为车辆评估的重要指标。因此,对汽车的侧倾问题进行分析研究、从车辆部件特性入手提高汽车的抗侧倾能力,减少侧倾事故的发生,是车辆操纵稳定性研究的焦点之一[2-4]。
在车辆转向行驶时,在离心力的作用下车身会发生一定程度的侧倾,随着侧向加速度的增大,车身侧倾的程度会变大,而车身侧倾会加剧垂直载荷在内外两侧车轮上的转移,进而使外侧车轮的垂直载荷增大、内侧车轮的垂直载荷减小,当内侧车轮的垂直反力减小为0,即内侧车轮离开了地面时,若车身有继续侧倾的趋势,车辆就有可能会发生侧翻[5]。导致车辆发生侧翻事故的原因有许多,包括车辆结构参数因素和一些随机因素[6-7]。车辆结构参数是指与车辆设计参数有关的一些因素,比如其重心高度、轮距、悬架和轮胎特性等;随机因素是指随车辆行驶而变动、不在车辆设计范围内的因素,比如路面的附着系数、道路上是否有障碍物、驾驶员对车辆的操纵方式等。
近年来,为提高车辆防侧翻能力,进一步改善主动安全性,国内外许多学者和汽车生产商针对整车侧翻控制问题进行了广泛的研究,且均取得了一定的成果。 Jangyeol Yoon等[8]采用一种侧翻指标值作为侧翻危险的判断,并通过该指标决定控制模式设计了一种统一底盘控制系统,用来预防车辆发生侧翻,并改善车辆操纵稳定性和侧向稳定性。Seongjin Yim[9]提出差动制动与主动悬架系统联合控制车辆的质心高度和行驶速度,进而实现车辆侧倾稳定性控制。李静等[10]针对轻型汽车神经网络非线性解耦底盘集成控制,重点研究了主动转向和主动制动系统的非线性解耦集成控制。上海交通大学喻凡教授课题组[11-12]对转向系统与 ABS、主动悬架和 ABS 以及底盘动力学集成控制等进行了研究,提出了许多关于底盘集成控制的新思路和方法,并取得了一定的研究成果。
微型客车由于其自身结构及装载方式的不同,使得其质心位置偏高,因此在转向时容易产生较大的车身侧倾角以及垂向载荷转移,而当侧向加速度和车身侧倾角的大小超过轮胎垂向载荷转移所能补偿的极限时,即当内侧车轮的垂直载荷为0时,侧倾就很有可能发生[13]。但是由于微型客车结构相对简单、成本低,兼具载货及载客的功能,目前在大部分城市及城郊地区仍然广泛使用,因此有必要进行微型客车防侧倾稳定性的研究,尤其需要研究微型客车本身结构及装载方式对侧倾稳定性的影响。
本文主要针对微型客车进行车辆侧倾敏感性研究,建立三自由度车辆侧倾运动学模型,进行虚拟试验,研究车辆结构参数、行驶参数以及装载方式等对微型客车侧倾稳定性的影响,为微型客车侧倾稳定性研究提供理论基础。
1 动力学模型
利用车辆标准坐标系,对车辆进行合理简化,得到一个包含车辆侧向运动、横摆运动以及侧倾运动的3个自由度的动力学模型[14]。在建立动力学模型之前,需进行如下假设:
1) 在行驶过程中,车身不会发生绕x轴的俯仰运动,且沿x轴匀速前进;
2) 忽略空气动力学产生的影响;
3) 假设车辆左右关于x轴对称,正常行驶状态下两侧车轮的受力相同;
4) 忽略车辆转向系、轮胎及悬架等非线性因素对车辆侧倾稳定性的影响;
5) 假设轮胎的参数不变,两个前侧及两个后侧轮胎的运动轨迹相同,同轴的内外侧轮胎有相同的转角和侧倾角;
1.1 动力学模型
根据以上假设建立三自由度简化模型,如图1所示。

图1 三自由度简化模型
设纵向速度恒定,忽略侧倾与横摆方向的转动惯性积的影响,以及非簧载质量以及前后轴不同运动特性对侧倾的影响,考虑前轮转角影响以及簧载质量在侧倾时的作用,将车辆行驶过程中车辆侧向、横摆及侧倾运动的方程表达如下:

(1)
aFyfcosδw-bFyr
(2)

(3)

忽略轮胎侧向力的非线性影响,定义前后车轮的等效侧偏刚度分别为Cαf、Cαr、,αf、αr分别为前轮和后轮的侧偏角,车辆前后轮的线性侧向力表达如式(4)(5)所示。

(4)

(5)
将式(4)(5)代入式(1)~(3),最终得到三自由度侧倾运动方程,如式(6)所示。
(6)
1.2模型验证
为了验证模型的有效性,在Simulink环境下进行干路面蛇形输入仿真,模拟转向盘输入来自实车试验,车辆前进速度为60 km/h。图2为仿真与实车试验所获得的车辆横摆角速度曲线对比。可以看出:仿真曲线与试验曲线吻合程度较高,仿真所得车辆横摆角速度稍小于试验值,主要由于建模过程中的车辆结构简化以及簧上簧下质量分配可能存在误差。但仿真曲线整体趋势与试验曲线一致,能够用于进行车辆侧倾敏感性的仿真分析。

图2 蛇形输入下车辆仿真与试验曲线对比
2 虚拟试验
目前,国内外严格针对车辆侧倾的评估试验标准还没有颁布,现在比较通用的对汽车稳定性进行评价的试验有J-turn试验和鱼钩(fish-hook)试验。本文按照上述2个试验的标准进行仿真,仿真试验中设定路面谱的附着系数为0.9,微型客车重心高度为800 mm。
J-turn试验和鱼钩试验共同点是需要提前确定转向盘转角的基准。首先,进行汽车侧向性能特征测试。汽车以80 km/h的速度直线行驶,在整个转向过程中,驾驶员通过调节加速踏板保持车速不变,即转向盘开始匀速转动,角速度为13.5 (°)/s,转角一直增大到270 °,然后在270 °的位置保持2 s,之后经过4 s匀速回到0 °。试验分左右两个方向,各进行3次。画出侧向加速度随时间变化曲线。对其加速度曲线的线性区进行线性拟合,拟合范围在0.1~ 0.4 g,用侧向加速度曲线与转向输入曲线找到0.3 g对应的转角位置A′,对6次测试结果的A′取平均值为A0。A0将用于J-弯试验和鱼钩试验的转角输入值的确定。利用前述模型进行仿真试验,所得A0为27.5 °。
2.1 鱼钩试验
汽车直线行驶,初始车速为75 km/h,司机松开加速踏板,0时刻触发自动转向机,并在0时刻前开始采集数据,自动转向机使转向盘转角按图3变化,即转角以720(°)/s匀速增大,当转角增大到6.5A0时保持0.25 s,然后用720(°)/s匀速反向转动到-A,保持3 s,再匀速(速度随意)回到0°。由于所建立的三自由度模型输入为前轮转角,需要将转向盘转角除以本车转向系统角传动比15.6。模拟所得车辆侧向加速度及车身侧倾角曲线如图4所示。
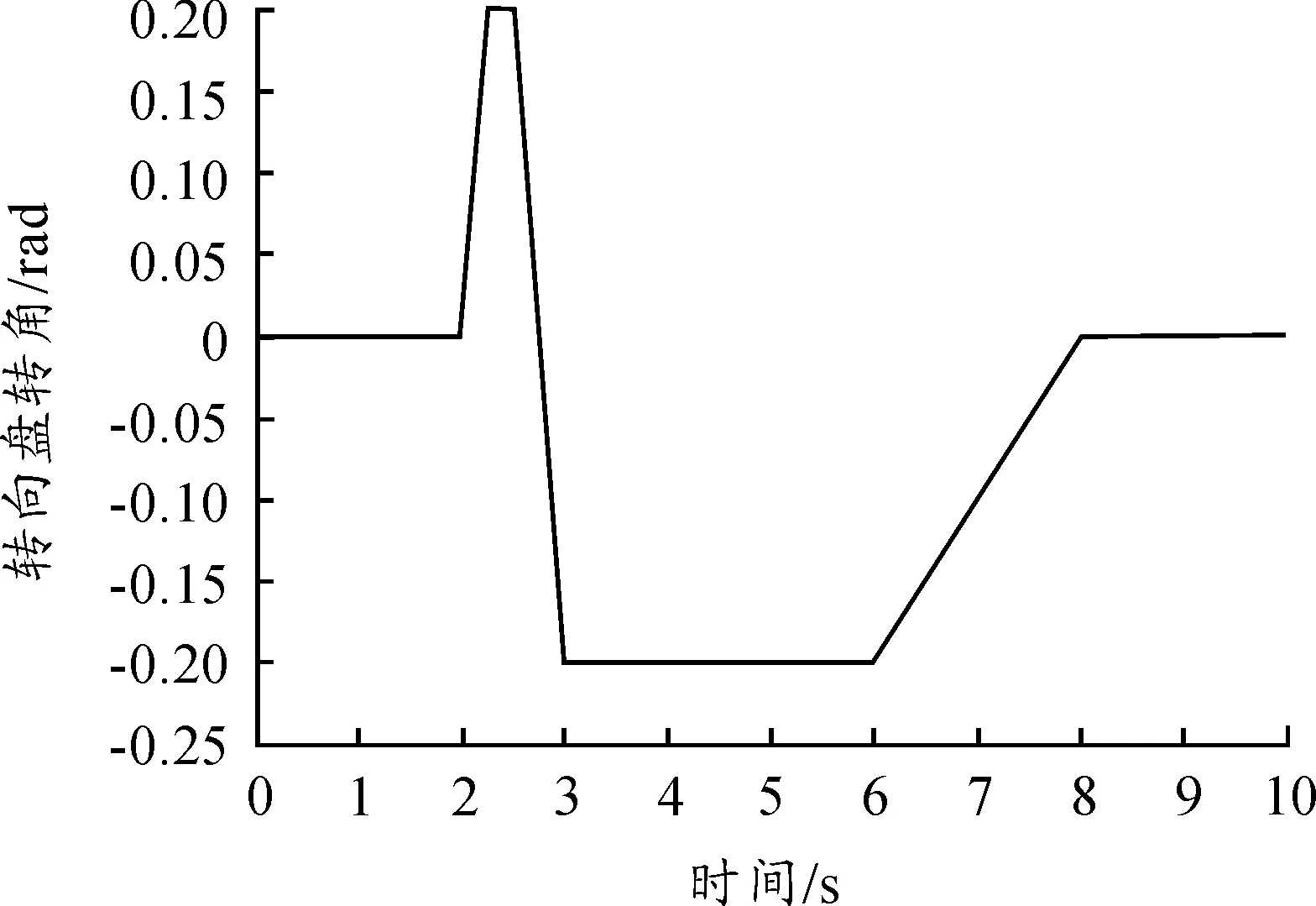
图3 鱼钩试验转向盘转角输入
由图4可以看出:侧向加速度与转向盘转角曲线变化趋势相近,方向相反,在急转弯的过程中侧向加速度最大值达 0.87g。车身侧倾角变化趋势与转向盘输入变化趋势一致,最大车身侧倾角达0.27 rad,达到了侧倾极限。此阶段转向盘转角变化速度较大,同时车辆行驶速度较高,两者同时叠加影响了车辆侧倾敏感性。
2.2 J弯试验
转向盘转角输入如图5所示,汽车直线行驶,初始车速为80 km/h,司机松开加速踏板,t=1 s时刻触发自动转向机,并在0时刻开始采集数据,自动转向机使转向盘转角按图7变化,即转角以1 000(°)/s匀速增大,增大到A=8A0,当转角增大到A时保持4 s,然后用2 s的时间匀速回到0°。由于所建立的三自由度模型输入为前轮转角,需要将转向盘转角除以本车转向系统角传动比15.6。模拟所得车身侧倾角及侧向加速度曲线,如图6所示。

图4 鱼钩试验所得车身侧倾角及车辆侧向加速度曲线

图5 NHTSA J-弯试验转向盘转角输入
由图6可知:转向盘开始反向转向时,车辆侧向加速度迅速增大,最大值达0.68g。同时,车身侧倾角最大值达到0.35 rad,车辆处于失稳临界状态。随着转向盘转角的变化,车辆重新回到稳定状态。主要因为此次模拟试验初始车速增加到了80 km/h,说明随着车速的增加,转向盘转角或转角速度对车辆侧倾影响的敏感性增加。

图6 NHTSA J-弯模拟试验所得车身侧倾角及车辆侧向加速度曲线
3 单参数影响敏感度分析
本文分析车辆结构参数、路面参数及驾驶员输入对车辆侧倾稳定型的影响,因此假设车辆质心高度不变,分别选取悬架侧倾刚度、车速、转向盘转角,考查某一参数变化对车辆侧倾运动输出参数的影响。
依据当前美国侧倾法规49CRF Part 575的规定,无论是静态测试还是动态测试均以车轮轮胎有无离开地面为判断依据,本文选定车辆动态垂向载荷转移率(VTRd)作为评价指标。
车辆动态垂向载荷转移率是指车辆的左、右车轮垂直载荷之差与其之和的比值,定义为车辆横向载荷转移率,其表达式如式(7)所示。
(7)
式中:FL为车辆左侧前后车轮垂直载荷之和;FR为车辆右侧前后车轮垂直载荷之和。
依据三自由度车辆运动方程(6),车身绕位于地面上的轮距中心点的受力平衡方程为:
hr2sinφ+gsinφ)=0
则有

hr2sinφ+gsinφ)
(8)


(9)
由式(9)可以看出:车辆侧倾稳定性指标可以根据车辆运动过程中的运动状态实时计算,由此可以作为是否发生侧倾的判断依据,VTRd的绝对值越大,车辆越容易发生侧翻。
3.1 侧倾刚度的影响
图7为鱼钩输入下改变悬架等效侧倾刚度所获得的动态载荷转移率对比,可以看出:车辆动态载荷转移率随着悬架等效侧倾刚度的增加而减小,车辆侧倾趋势减小。当悬架等效侧倾刚度小于10 kN·m/rad时,其对动态载荷转移率的影响较大,而当悬架等效侧倾刚度值大于10 kN·m/rad时,其变化对动态载荷转移率的影响差别不是很大,这是因为当悬架等效侧倾刚度增加到一定值以后,簧上质量与簧下质量近似一个刚体,此时影响车辆侧倾的主要因素变成了车辆质心高度,因此动态载荷转移率差别较小。
3.2 车速变化影响
动态载荷转移率随车速的变化如图8所示,可以看出:动态载荷转移率最大值随着车速的增加而增加。其他因素不变,当车速增加到80 km/h时,动态载荷转移率最大值达到-1,车辆处于失稳状态。随着转向盘转角的回正,车辆恢复到稳定运行状态。因此可以认为:当车辆处于急转弯状态时,车速越高,车辆发生侧倾的危险性越大。

图7 悬架等效侧倾刚度对动态载荷转移率的影响

图8 车速对动态载荷转移率最大值的影响
3.3 转向盘转角变化影响
固定车速输入为50 km/h时,改变转向盘转角阶跃输入,分析车辆动态载荷转移率的变化趋势,如图9所示。由于本文所建立的模型为车辆前轮转角输入,此处描述为车辆前轮转角与动态载荷转移率之间的变化关系。可以看出:当前轮转角在15°以下时,车辆能够保持稳定运行状态,但当前轮偏转角超过15°时,动态载荷转移率最大值则容易超过稳定范围(一般认为动态载荷转移率超过±0.8时,车辆处于侧倾失稳门限),车辆易于发生侧倾失稳。说明在车辆转弯状态下,需要减小转向盘转角或者减小转向盘转角速度,以维持车辆的稳定运行状态。

图9 前轮转角对动态载荷转移率的影响
4 结论
本文利用Matlab/Simulink建立车辆三自由度侧倾模型,进行虚拟蛇形及阶跃转向试验,用于分析车辆侧倾失稳对车辆本身及外界参数变化的敏感度。
1) 建立某微型客车的三自由度侧倾动力学模型,并利用干路面蛇形试验数据,对所建立的模型进行验证,结果表明:该三自由度模型可以用来进行车辆转弯过程中侧倾稳定敏感性的研究。
2) 利用J弯及鱼钩试验标准,进行车辆模拟试验,对两种典型输入下车辆的侧向加速度和车身侧倾角进行分析,得出结论认为车速及转向盘转动速度对车辆侧倾运动输出参数的影响较大。
3) 提出动态载荷转移率,结合车辆运动状态,对侧倾敏感性进行分析。确定悬架等效侧倾刚度、车速及转向盘转角3个参数,进行车辆侧倾敏感度分析,其中车速本身对车辆侧倾失稳的影响不大,但结合转向盘转角之后,对车辆的侧倾趋势影响增大,当车速增加到80 km/h以上时,较小的转向盘转角变化就会使车辆发生侧倾。
[1] National Highway Traffic Safety Administration.Traffic safety facts 2012:A compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[R].Washington DC:Department of Transportation,2012.
[2] 张雷,金智林,赵曰贺,等.基于ADAMS的汽车侧翻稳定性仿真分析[J].重庆理工大学学报(自然科学),2015,29(10):24-28.
[3] 邵毅明,司红建,查官飞.大客车侧翻安全性仿真分析[J].重庆理工大学学报(自然科学),2013,27(2):6-12.
[4] 郝海舟,符志.某客车侧翻的计算机模拟测试[J].客车技术与研究,2015(1):23-25.
[5] 黄晨,陈龙,江浩斌,等.稳态工况下横摆角速度与侧倾角的关系分析[J].农业机械学报.2014,45(2):34-39.
[6] 赵健,郭俐彤,朱冰,等.基于底盘集成控制的轻型汽车防侧翻控制[J].汽车工程,2014,36(3):334-339.
[7] 张衍成.基于Matlab/Simulink的车辆主动悬架模糊控制仿真研究[D].沈阳:辽宁工业大学,2014.
[8] YOON Jangyeol,YI Kyongsu.A Roll-Rollover Mitigation Control Scheme based on Rollover Index[C]//Proceedings of the 2006 American Control Conference.USA:[s.n.],2006.
[9] YIM Seongjin,PARK Youngjin.Design of rollover prevention controller with linear matrix inequality-based trajectory sensitivity minimisation[J].Vehicle System Dynamics,2011,49(6):1225-1244.
[10] 王西建.轻型汽车神经网络非线性解耦底盘集成控制研究[D].长春:吉林大学,2013.
[11] 李红志,李亮.车辆转向过程稳定性分析与控制[J].清华大学学报(自然科学版),2010,50(8):1282-1 285.
[12] 宋小文,李杰.一种改进的汽车侧倾模型及其应用研究[J].汽车工程,2009,31(10):971-975.
[13] 马春卉,吴志林,王良模,等.汽车ESP系统的建模和控制方法[J].南京理工大学学报(自然科学版),2010,34(1):108-112.
[14] 杜峰,闫光辉,魏朗,等.主动四轮转向汽车最优控制及闭环操纵性仿真[J].汽车工程,2014,36(7):848-852.
(责任编辑刘 舸)
StudyofLightVehicleRolloverTendencyBasedonVertical-LoadTransferRate
LI Shengqin, TAN Lijun
(Traffic College, Northeast Forest University, Harbin 150040, China)
Taking a mini-bus as the research object, a three degree freedom multi-body dynamics model is developed using Matlab/Simulink to analyze mini-bus dynamics and sharp turn stability. Using the J-turn and NHTSA Fish-hook virtual tests, the influence of vehicle velocity and steering angle on the vehicle lateral acceleration and vehicle body rollover angle are analyzed. The influences of mini-bus structure, traffic conditions, and external conditions on the rollover tendency were also analyzed in single-factor experiments. A correlation between the vehicle parameter of center of gravity location and rollover propensity is found, and the results show that the vehicle center of gravity is the most important parameter which influenced the rollover tendency of mini-bus, and combined of the vehicle velocity, the steering velocity also has some influence on the rollover stability of mini-bus. The results can be used to improve mini-bus redesigns, to improve risk prediction, and to reduce the incidence of traffic accidents.
mini-bus; vertical-load transfer rate ; rollover tendency; single parameter; virtual test
2017-05-20
黑龙江省自然科学基金资助项目(E2016003);中央高校基本科研业务费专项资金资助项目(DL13CB07)
李胜琴(1976—),女,黑龙江哈尔滨人,博士,副教授,主要从事车辆系统动力学及控制研究,E-mail:lishengqin@126.com。
李胜琴,谭丽军.基于垂向载荷转移率的微型客车侧倾敏感性研究[J].重庆理工大学学报(自然科学),2017(11):9-15.
formatLI Shengqin,TAN Lijun.Study of Light Vehicle Rollover Tendency Based on Vertical-Load Transfer Rate[J].Journal of Chongqing University of Technology(Natural Science),2017(11):9-15.
10.3969/j.issn.1674-8425(z).2017.11.002
U461.6
A
1674-8425(2017)11-0009-07