人体颈肩按摩机械手设计研究
2017-12-06赵维超刘庆运
赵维超,刘庆运
(安徽工业大学 机械工程学院, 安徽 马鞍山 243032)
人体颈肩按摩机械手设计研究
赵维超,刘庆运
(安徽工业大学 机械工程学院, 安徽 马鞍山 243032)
为促进人体颈肩按摩智能化,基于人体颈肩的按摩穴位与按摩手法,对人体颈肩按摩机械手进行了机构设计。应用Solidworks设计出三维模型,并通过Solidworks中插件motion对其进行运动仿真分析,以用来验证按摩机械手强度设计和轨迹设计的合理性,为人体颈肩按摩机械手的研制提供必要的理论基础。
人体颈肩;按摩机械手;三维模型;运动仿真
随着科学技术的发展,计算机已经成为人们日常生活中必不可少的一部分。坐在电脑前,不知不觉就变成了久坐一族,导致头痛、目眩或者颈椎的不适,其中颈背酸痛更令很多白领们不堪其扰。针对这一现象,笔者设计研究的按摩机械手将应用于人体颈肩穴位的按摩,将现代化的机械工艺与传统的中医学相结合,以实现中医按摩手法。
人体按摩的常用穴位有40多个[1-3],但每个穴位具有不同的功效,所以按摩穴位的选择也很多,可以根据自己的需要选择不同的穴位。如脑力劳动者,用脑过多,此时可以采取按摩头面部的穴位,而体力劳动者,四肢酸痛,则可以采取按摩四肢背部的穴位等。但是仅仅了解穴位还远远不够,人体遍布穴位,怎样才能按摩得舒适,这又将考验按摩的手法及操作姿势是否标准。
操作时需要注意,力量应直接作用于穴位的外表皮肤。平时若出现身体不适症状,如因看书或低头过久,感到腰背酸痛等症状均可选择相关穴位进行适当的按摩,调节人体生理机能,从而缓解身体不适。
1 人体颈肩按摩穴位的研究
按摩是以中医基础理论为指导[4],通过专业的手法所产生的作用力应用于人体体表的特殊穴位,从而达到调节人体生理机能的目的。
按摩的作用十分广泛,具有调节血液循环、增强心脏功能、调节神经功能;增加机体抗病能力;同时,还能提高自身免疫功能,矫正骨与关节的位置异常,改善关节的功能、修复创伤组织、增加皮肤弹性、消除肌肉疲劳,增进肌肉的动力等功能。
通过进一步的研究发现:按摩时需运用不同的手法给穴位施加压力,如颈部和上肢常用按摩手法一般有推、揉、揉捏、叩打等。人体颈肩按摩机械手主要是针对颈肩上的7个常用按摩穴位:风池穴、天柱穴、大椎穴、肩井穴、秉风穴、肩髎穴、天宗穴进行按摩研究。下面笔者将分别叙述每个穴位的手法及功效,并参照身高175 cm成年男性标准尺寸建立人体穴位模型。
1.1 人体颈肩按摩穴位位置与功效
风池穴的位置:通过将双手掌心贴住耳朵,十指自然张开抱头,拇指慢慢往上推,在脖子与发际的交接线会发现有一凹处,便是风池穴。其按摩功效:消除黑眼圈,改善颈部僵硬,消除肩膀酸痛,还能治疗头痛,缓解眩晕,以及缓解日常生活中出现的落枕现象。
天柱穴的位置:可以在后颈部正下方凹处找到,也就是颈脖子处有一块突起的肌肉,这块肌肉外侧凹处,后发际正中旁开约2 cm左右便是天柱穴。其按摩功效:经常按摩能够治疗颈椎酸痛、头痛、鼻塞,对高血压的治疗有显著效果。
大椎穴的位置:位于人体的颈部下端,找到第七颈椎棘突下凹陷处即是大椎穴。若发现突起骨并不明显,可以让患者适当活动颈部,不动的骨节为第一胸椎,其位置约与肩平齐。其按摩功效:可以舒缓夏季的常见病如中暑等症状,此外还对治疗肩背疼痛起到很好的辅助作用。
肩井穴的位置:位于肩上位置,前直乳中。其按摩功效:如有头重脚轻、眼睛疲劳时可以适量按摩肩井穴,而且有助于治疗肩背痛、颈项、肩周炎、肩软组织损伤、上肢痛等,效果显著。
秉风穴的位置:位于人体的肩胛部,冈上窝中央,天宗穴直上,举臂时如有凹陷即是秉风穴。其按摩功效:经常按摩能够缓解治疗肩臂疼痛、肩周炎,如有患者上肢酸麻或患支气管炎可以适当在此处按摩。
肩髎穴的位置:位于人体肩部,肩髃后方,每当臂外展时,于肩峰后下方即会呈现一处凹陷,便是此穴位。其按摩功效:可以缓解上肢麻痹或瘫痪的症状。
天宗穴的位置:位于肩胛部,在冈下窝中心凹陷的位置,与第四根胸椎相齐平。其按摩功效:如有患者有肩膀酸痛、气喘、肩部疾病等症状,可以通过按摩缓解。 除此之外,还可缓解肩关节周围肌肉劳累、促进气血运行,甚至能够丰胸美乳、对于预防乳腺增生也有很好的效果。
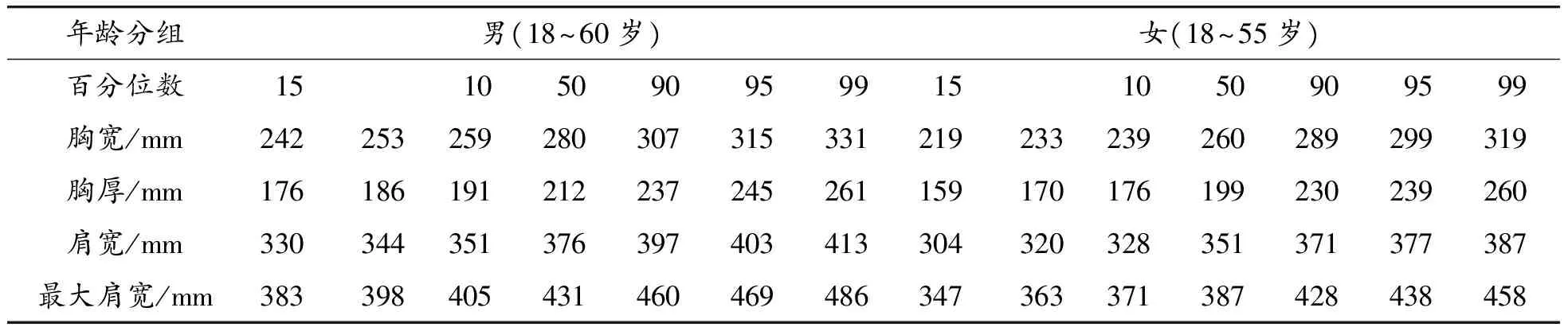
表1 人体肩部标准尺寸
1.2 人体颈肩按摩穴位建模
通过对上述颈肩按摩穴位位置的研究,为了进一步合理化完成机械按摩手设计,将参考人体正常标准尺寸(如表1所示),并结合风池穴、天柱穴、大椎穴、肩井穴、秉风穴、肩髎穴、天宗穴这7个常用穴位的位置,最后参照身高为175 cm成年男性标准尺寸,建立人体颈肩穴位三维模型,如图1所示,人体颈肩尺寸如图2所示,从而对按摩机械手拟人化设计提供尺寸参数。
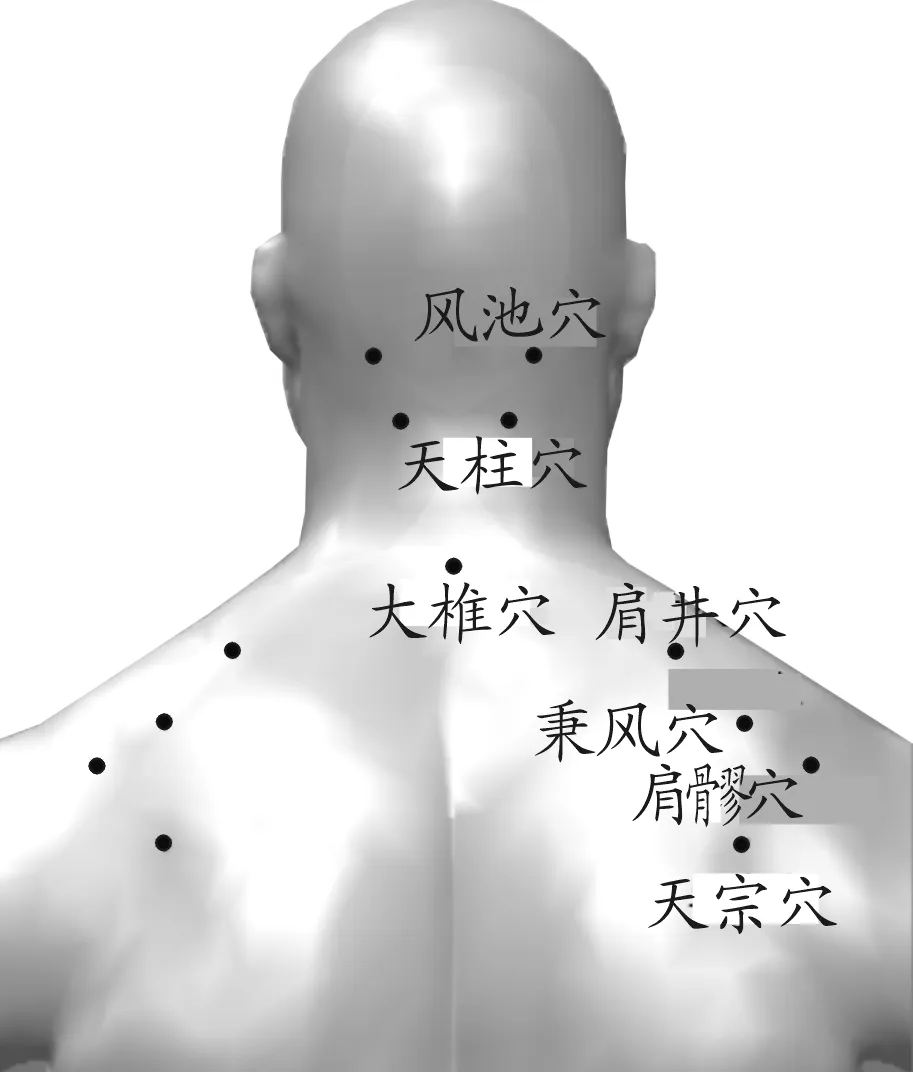
图1 颈肩三维模型穴位图
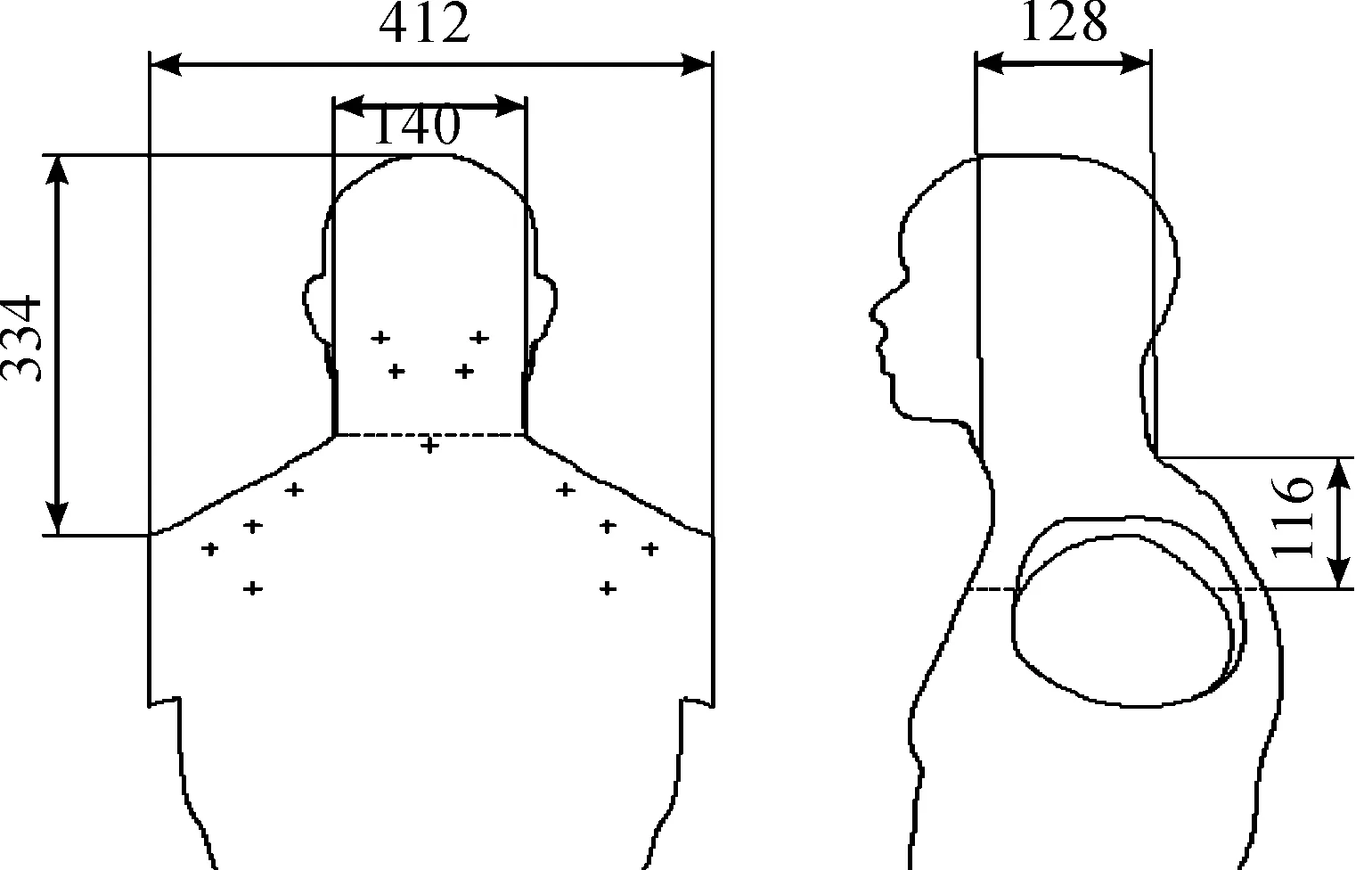
图2 人体颈肩尺寸图
2 人体颈肩按摩机械手的建模
人体颈肩按摩机械手是由手指部件、手掌部件、驱动与回转装置这3个部件组成。其主要实现的功能是将机械手指部件根据人体的需要移动到相对应的穴位位置上。 人体颈肩按摩机械手的机构设计可以分为机械手所有零部件的三维建模与所有零部件的装配。首先,通过模拟人手的大小尺寸,在按摩手法要求的基础上,先对模拟出人体颈肩按摩机械手的相关零件的结构和尺寸设计出合适的三维模型,运用Solidworks软件的相关功能进行对零部件的装配,进而装配出所需要的模拟样机。因此,可以得出其每一个按摩机械手零部件的三维建模都会是按摩机械手模拟样机的基础。
2.1 人体颈肩按摩机械手机构特征
机械手自由度的选择与机构设计的复杂程度有关,为了满足颈肩穴位的按摩要求,实现机械手手指执行适当的按摩穴位位置,研究的人体颈肩按摩机械手腕需具备3个自由度,按照模拟人手的尺寸设计,模拟建模的机械手具有4个手指部件,每个手指部件都具有2个活动关节即具有2个自由度,机械手腕需要旋转以用来调节位置,因此在手腕处具有1个回转装置即具有1个自由度。人体颈肩按摩机械手的运动应该是手臂和按摩机械手的运动结合而成。其中,机械手臂的自由度是为了满足机械手在按摩空间的位置以及运动的范围,最终实现调整空间姿态,本文对手臂的结构设计暂不考虑。
2.1.1 按摩机械手手指部件
人体颈肩按摩机械手手指部件是由指连接关节和指尖关节2个关节组成,通过2个驱动气缸的伸缩完成这2个关节的摆动,最终实现手指的按捏。其中,气缸的选用需要满足一定的压力范围,根据人手尺寸以及气缸的选用尺寸,最终设计出人体颈肩按摩机械手手指部件。图3所示为按摩机械手手指部件的三维建模。 图4所示为按摩机械手手指的运动范围。

图3 按摩机械手手指部件

图4 按摩机械手手指的运动范围
2.1.2 按摩机械手手掌部件
由于按摩机械手是按照人体手比例设计的,故需要满足4个手指的安装空间以及支撑强度,还需要能满足气囊空间的安放,因此空间需要紧凑,材料的选用需要有一定的强度,选择采用16Mn。
2.2 驱动与回转装置
通过对按摩力度的研究,按摩力度范围为0~8 kg,因此按摩机械手手指部件的2个关节的驱动选用气缸驱动[5]。气缸驱动的特点是工作介质为气体,需要通过气体的气压传递动力,便于控制,维护相对方便,成本低。
通过对气缸压力的计算,选用的气缸的缸径设定为10 mm;所用气缸行程的设定应满足手指关节开张范围以及指尖的摆动范围,综合上述要求选定气缸1行程为35 mm,气缸2行程为10 mm。有了这样微型气缸主要参数的确定,整个人体颈肩按摩机械手模拟样机的设计也就有相应的参数。
由于按摩机械手手腕需要满足360°旋转的条件才能更好地调整按摩的位置,因此按摩机械手手腕回转装置准备采用微型回转支撑[6]。 回转支撑由马达、回转支承、蜗杆等几个部件组建而成,其核心部件是回转支承,可以承受多个方向的轴向力、径向力和力矩。
根据人体穴位模型尺寸、人体标准尺寸、气缸的选用尺寸、回转装置的选用尺寸等,设计出人体颈肩按摩机械手,其实现的张合角度及尺寸如图5所示;结合建立的人体颈肩三维模型进行模拟按摩,如图6所示。
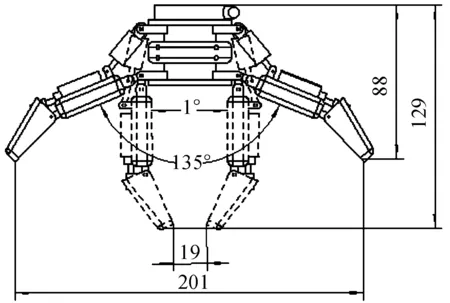
图5 按摩机械手张合对比
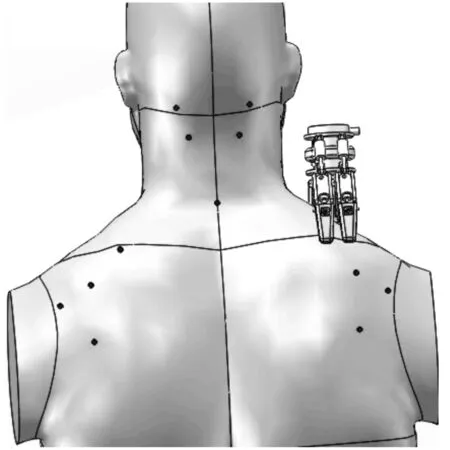
图6 按摩机械手三维按摩模拟
气缸输出力:
式中:F为 理论气缸出力(N);P为空气压力(bar);d为活塞杆直径(mm)。
F′=85%F
F′表示效率为85%时的输出力。
1 MPa=10 kg/cm2
1 N=0.1 kgf
d=10 mm;P=0.8 MPa
故而符合设计要求。
3 按摩机械手手指部件运动学的建模
机械手手指部件运动学的主要研究方向是各连杆变换之间位移的关系、速度的关系以及加速度的关系,其中同样包括正运动学和逆运动学,在完成机械手设计、制造和控制的实践之前,还需要具备机械手运动学的理论基础。当已知机械手所有关节变量参数时,就可以通过其正运动学来计算出所需末端执行器的位姿;再根据算出的最终数据,通过反推导求得机械手每个连杆的转角,最终实现对机械手运动学模型的分析。
图7所示是机械手的手指部件[7],可把它当作是一个开式运动链,其是由2根连杆之间通过关节串连而建立起来的。为了研究机械手各连杆之间的运动关系,此处可采用D-H坐标法[8]建立机械手手指部件连杆坐标系,如图8所示。
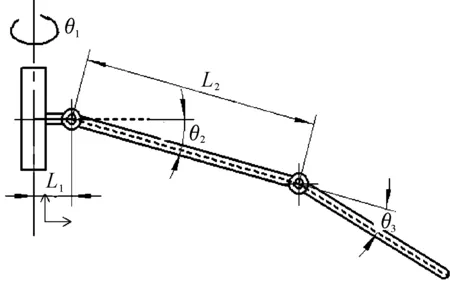
图7 机械手手指简图
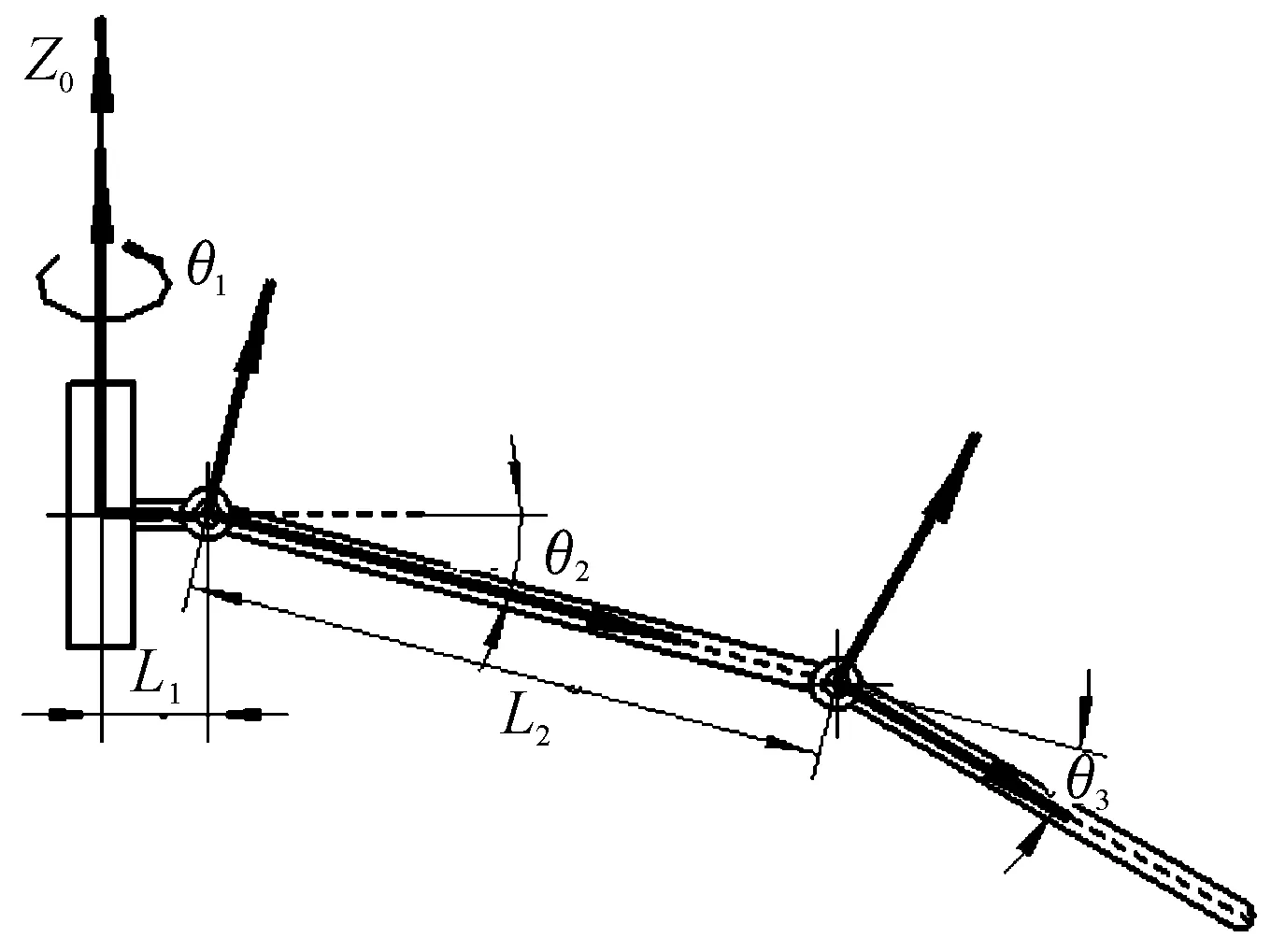
图8 机械手手指部件连杆坐标系
通过依据所建立的连杆坐标系如表2所示,有助于快速确定机械手手指部件各杆件结构参数和关节变量。
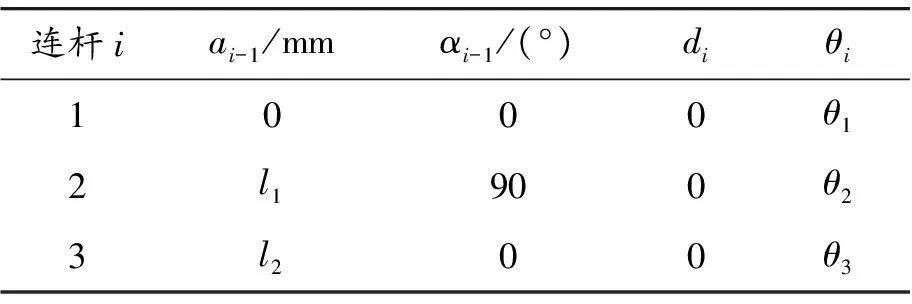
表2 机械手手指部件连杆参数

Rot(z,θi)Trans(z,di)=
(1)
根据连杆变换通式以及连杆参数,可以得到按摩机械手手指部件各连杆的变换矩阵:
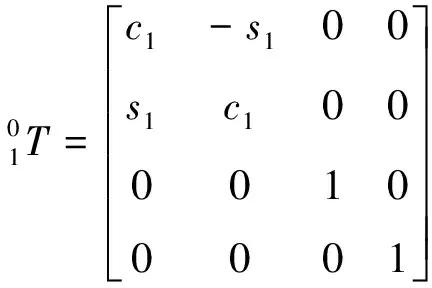
(2)
式中si=sinθi,ci=cosθi,i=1、2、3。
根据多级连杆变换传递规律得:
(3)
由以上的相对变换得:
(4)
式中:
c23=cos(θ2+θ3),s23=sin(θ2+θ3)
根据以上分析,得到机械手手指部件运动学方程的齐次坐标表达式:
(5)


末端机械手手指部件关于坐标系{3}的坐标设为
(6)
其为坐标系{3}的原点,末端机械手手指部件关于基座坐标系{0}的坐标设为
(7)
可以表示末端机械手手指部件在空间任意位姿,将式 (4)、 (6) 、(7) 代入式(5)得:
(8)
(9)
机械手手指部件的雅可比矩阵[9]可对式 (9)中关节变量参数θ1、θ2、θ3求偏导数,算出空间按摩机械手手指部件雅克比矩阵:
(10)
4 按摩机械手手指部件的运动学仿真
作为工程学中常用的Solidworks软件,功能众多,其中的Motion插件[10]可以帮人们建立一个虚拟样机仿真工具,能实现全面的动力学和运动学仿真,并可得到所需的参数,比如在建模中需要求得零件各部的作用力、反作用力、速度、加速度以及位移等,而且能更加直观地以动画、图形以及表格等多种形式输出结果。人体颈肩按摩机械手手指部件主要运动是由指连接关节和指尖关节的运动组成,因此我们将建立好的三维装配体模型转入Motion插件中,再通过添加仿真约束,加入所需的马达、阻力、引力,最终建立仿真模型条件,并对虚拟样机的动力和运动进行分析。
指尖关节的运动是通过连接关节装置里的驱动气缸的伸缩来实现的,通过设计的气缸行程为10 mm,在添加了驱动约束条件下对指尖的关节进行仿真,最终实现指尖关节仿真的运动范围角为28°,最后通过运用的仿真结果来生成指尖关节的图解,其中图9~11分别为指尖关节的位移-时间、角速度-时间、线性速度-时间。这些数据可用来验证按摩机械手的合理性。

图9 指尖关节的位移-时间

图10 指尖关节的角速度-时间
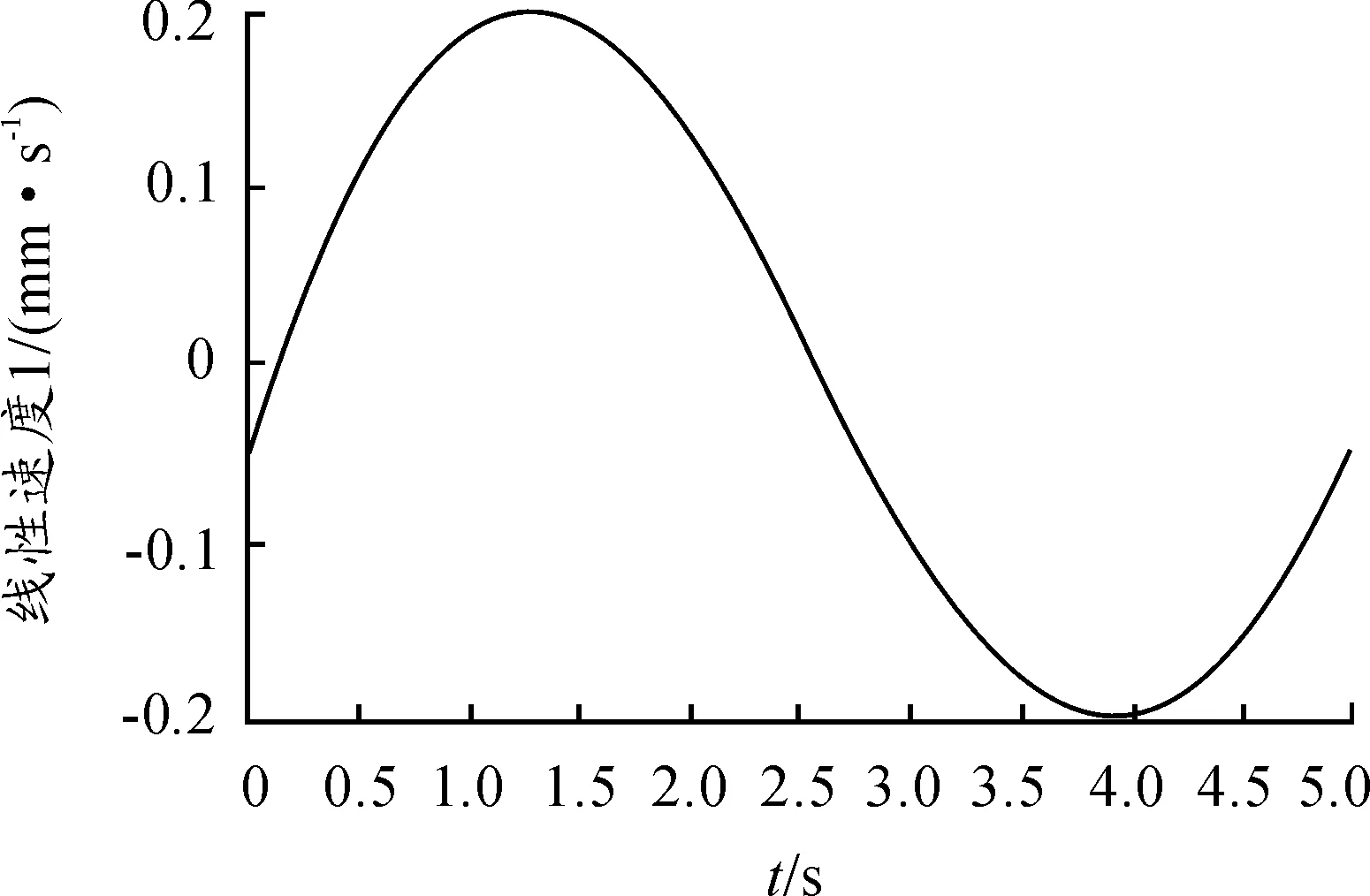
图11 指尖关节的线性速度-时间
5 结束语
基于人体颈肩的穴位特征与中医按摩手法,对人体颈肩按摩机械手进行机构设计,通过对按摩机械手手指部件运动学的分析和仿真,得到虚拟样机的运动过程分析和预期设计相符合,验证了按摩机械手的设计合理性,为人体颈肩按摩机械手的进一步研制奠定了理论基础。
[1] 傅海坤.养生保健穴位按摩法(一)[J].双足与保健,2003(1):8-10.
[2] 傅海坤.养生保健穴位按摩法(二)[J].双足与保健,2003(2):26-30.
[3] 傅海坤.养生保健穴位按摩法(三)[J].双足与保健,2003(3):35-40.
[4] 高焕兵,鲁守银,王涛,等.中医按摩机器人研制与开发[J].机器人,2011(5):553-562.
[5] 李海龙,王恒斌,李林涛,等.一种气缸选型模拟计算方法[J].液压气动与密封,2014(2):27-28.
[6] 谢艳平.具有360°回转功能的六自由度运动平台的优化设计[D].武汉:华中科技大学,2008.
[7] 刘博,张玉茹,任大伟,等.人手食指运动学建模[J].机器人,2007(3):214-218.
[8] 雷静桃,王峰,俞煌颖.四足机器人轨迹规划及移动能耗分析[J].机械设计与研究,2014(1):29-34.
[9] 米士彬,金振林.基于雅克比矩阵求解并联机器人位置正解方法[J].燕山大学学报,2011(5):391-395.
[10] 李大磊,丁天涛,程建民,等.基于SolidWorks Motion的空间摆动机构的运动分析[J].制造业自动化,2011(22):70-71.
(责任编辑林 芳)
StructureDesignofHumanBodyNeckandShoulderMassageManipulator
ZHAO Weichao, LIU Qingyun
(School of Mechanical Engineering, Anhui University of Technology, Ma’anshan 243032, China)
In order to promote the massage intelligent of human body neck and shoulder, the massage manipulator mechanism of human body neck and shoulder is designed based on the human body neck and shoulder massage acupuncture points and massage technique. It will use Solidworks to establish the three-dimensional model massage manipulator of human body neck and shoulder, and it will focus on the analysis of the manipulator motion simulation to verify the rationality of the design of mechanical strength design and trajectory in order to promote the development of the human body neck and shoulder massage manipulator, which provides necessary theoretical basis for the research of human body neck and shoulder massage manipulator.
human body neck and shoulder; massage manipulator; three-dimensional model; motion simulation
2017-07-03
安徽高校省级自然科学研究重点项目(KJ2014A028)
赵维超(1990—),男,硕士,主要从事机械工程研究,E-mail:469651410@qq.com。
赵维超,刘庆运.人体颈肩按摩机械手设计研究[J].重庆理工大学学报(自然科学),2017(11):102-108.
formatZHAO Weichao,LIU Qingyun.Structure Design of Human Body Neck and Shoulder Massage Manipulator[J].Journal of Chongqing University of Technology(Natural Science),2017(11):102-108.
10.3969/j.issn.1674-8425(z).2017.11.015
TH122
A
1674-8425(2017)11-0102-07
