基于交叉证认的EMD小波滤波在大桥动态监测去噪中的应用
2017-11-30胡夏闽朱绍奇
吴 杰, 胡夏闽, 乔 燕, 余 腾, 朱绍奇, 马 静
(1. 宿迁学院 建筑工程学院, 江苏 宿迁 223800; 2. 南京工业大学 土木工程学院, 南京 211816)
基于交叉证认的EMD小波滤波在大桥动态监测去噪中的应用
吴 杰1, 胡夏闽2, 乔 燕1, 余 腾1, 朱绍奇1, 马 静1
(1. 宿迁学院 建筑工程学院, 江苏 宿迁 223800; 2. 南京工业大学 土木工程学院, 南京 211816)
在大桥动态位移监测中,为了更好地滤除噪声,提出了一种改进的交叉证认EMD小波滤波方法。即先用EMD对信号进行分解,再用交叉证认方法自适应地算出噪声主导分量,最后用小波阈值对噪声主导分量进行滤波;其中阈值函数选取极为关键,给出了一种新的阈值函数计算方法;最后进行信号重构。实例分析表明,该方法能够更有效地滤除噪声,提取大桥振动信息,是一种高效的去噪方法。
交叉证认;EMD小波;小波阈值;大桥动态监测
由于车辆荷载、环境侵蚀、人为作用以及养护维修不及时,桥梁结构在其长期服役期间将不可避免地发生累积损伤和疲劳破坏[1]。斜拉桥主梁变形主要由温度、车辆及风引起,其中温度荷载相对于车辆荷载变化缓慢,风荷载相对于车辆荷载对主梁竖向位移的影响也很小,因此从GPS(Global Positioning System)监测数据中分离出车辆荷载引起的位移具有可行性[2]。国内外学者研究表明,结构振动振幅一般为10~200 mm,频率为0.1~10 Hz,表现为低频振动。动态变形监测是桥梁结构健康监测的重要内容之一,全球导航卫星系统(Global Navigation Satellite System, GNSS)和自动型全站仪(Rototic Total Station, RTS)是目前获取结构动态变形信息的两种主要手段[3]。余加勇等[4]通过自动全站仪监测了桥梁结构位移和振动频率,表明其监测方法精度能满足实际工程要求。黄声享等[5-7]对基于GPS和测量机器人的大桥几何监测系统进行了研究,表明该系统稳定、可靠,具有独特的优越性。另外,在温度、风速、车辆荷载等环境条件的影响下,结构实测模态参数会在一个较宽的范围内波动[8-9];因此,利用实时监测数据进行结构异常和损伤诊断是桥梁健康监测的基本目的。
GPS已广泛应用于各种结构健康监测中,定位精度主要受到多路径和观测噪声的影响[10]。包括随机噪声、非随机噪声和粗差,可以通过适当的滤波方法进行处理[11]。刘霞等[12]对基于EMD(Empirical Mode Decomposition)的小波阈值地震信号去噪进行了研究;罗飞雪等[13]对基于交叉证认的EMD滤波在GPS多路径效应中的应用进行了研究;夏楠等[14]对卡尔曼滤波与粒子滤波相结合的非线性滤波算法进行了研究。
目前,去噪方法主要有EMD去噪、小波去噪、FIR滤波、Vondrak滤波、卡尔曼滤波、f-x滤波、Radon变换法等。大多数时频分析方法都带有基底,把空间看作是基底的展开;各个分量频率固定不随时间变化。而EMD方法是一种处理非线性非平稳时间序列的方法,其本质是对信号进行平稳化处理,各分量具有明显的物理意义,分量的HHT(Hilbert-Huang Transform)变换具有意义;是一种没有基底的自适应方法;但目前也存在一些需要研究的问题,如端点效应处理、模态混叠问题、均值曲线拟合、停止准则讨论等。
传统EMD方法直接舍弃高频分量,去噪同时也会去掉部分有用信号;为了提高滤波效果,本文提出了一种基于交叉证认的EMD小波滤波方法,并对观测数据进行了计算比较,结果表明该方法较其它方法降噪性能有显著改善。
1 交叉证认方法
交叉证认的思想是把实测的含噪时间序列数据分为滤波样本和证认样本,然后相互交叉证认实现信号和噪声的分离。具体过程如下:
(1)如果含有噪声的原始数据为奇数个,则在后面补零,使其个数为偶数N。
(2)把观测时序(ti,xi),i=1,2,…,N分为奇数样本一(t1,2m-1,x1,2m-1)和偶数样本二(t2,2m,x2,2m),m=1,2,…,N/2。把奇数样本一作为滤波样本,对偶数样本二随机取样,作为证认样本(样本数为N1lt;lt;N/2,取N1=0.1N)。
(3)把奇数样本一进行自适应EMD分解,得到N2个IMF(Intrinsic Mode Function)分量和一个趋势分量rn。
(4)假设k(k=1,2,…,N2)~N2的IMF分量之和为去噪后的滤波值f′,并用相应的插值方法内插出证认样本对应时刻的值f′(t2, i)。计算证认样本对滤波值的方差
(1)
式中,pj为对样本二的某次随机划分,j=1,2,…,W,W为随机取样数,本文取20。
(5)计算W个证认样本方差均值
(2)
(6)由于滤波样本为原数据的一半,因此取原数据EMD分解后的k+1~N2IMF分量及趋势部分r之和为原数据EMD滤波后的信号部分[15]。
考虑到防止端点效应的影响,选取原始数据中间70%的部分进行计算。交叉证认方法通过证认样本对滤波样本的最小方差均值来确定信号层,是一种完全自适应的方法,不需要先验信息和频谱分析。
2 EMD小波滤波
2.1 EMD小波原理
EMD分解能把非平稳、非线性原始数据自适应地分解为稳态和线性的单组分本征模态函数IMF。把复杂的信号分解成有限个有瞬时频率有意义的、幅度或频率受调制的高频和低频的本征模态分量[16]。本质是通过特征时间尺度获得本征振动模式,再由本征振动模式来分解时间序列数据[17]。EMD方法能够较好地消除短期脉冲的干扰,但过滤白噪声能力不如小波阈值法。
由于短期脉冲一般幅值较大,小波阈值法对其过滤效果较差。由于白噪声的方差和幅值随小波分解层数而逐渐变小,所以小波阈值法对白噪声过滤较好;而信号方差和幅值与小波分解的尺度无关。所以二者结合互取所长滤波效果更好,具体过程如下:
(1)对原始观测数据进行EMD分解,得到各尺度分量IMF1,IMF2, …,IMFn和趋势项rn。
(2)进行交叉证认计算,得到噪声主导分量和信号主导分量。


写成流程图形式:

图1 EMD小波分解流程图Fig.1 Flow chart of EMD-wavelet
2.2 小波阈值方法的改进
用小波对EMD分量去噪是否成功的关键是小波阈值的选取。阈值选取过大,会去掉部分有用信号;阈值过小,则去噪不彻底。由Lipschitz Exponents理论可知
log2|W2jf|=log2A+jα
(3)
式中:j为小波变换尺度;α为Lipschitz指数。
随机噪声的Lipschitz指数为-0.5-ε(εgt;0),小波去噪时,各个尺度阈值一般按折线方式递减;小波变换后模值的上界衰减是符合指数规律的。本文给出的阈值计算函数
(4)

2.3 小波分解层数的确定
在小波分解过程中,分解层数越大,噪声模极大值的幅值及稠密度越小,信号模极大值的幅值及稠密度越大。因此采用以下自适应方法确定分解层数。
设EMD噪声分量小波分解第i层细节系数d(t)(t=1,2,…,M),自相关函数为

(5)

(1)选择小波函数,对EMD某噪声分量进行一层分解,得到逼近系数a1和细节系数d1,对d1进行白噪声检验。
(2)如果检验不通过则对a1继续进行分解,分解为a2和d2。对d2进行白噪声检验,如果通过检验则继续对a2进行分解检验,如果此重复直到dp不通过检验为止。

(4)用阈值处理后的细节系数和p-1层逼近系数ap-1重构得到噪声分量中提取出来的有用信号。
3 时频分析
对于满足单组分的时序数据X(t)的HHT变换

(6)
式中,P为柯西主分量。
从而得到复信号
Z(t)=X(t)+iY(t)=a(t)eiθ(t)
(7)
其中,

(8)
瞬时频率

(9)
则原数据可表示为
(10)
Hilbert谱为
(11)
边缘谱为

(12)
式中,T为序列的时间长度。
频率ωi(t)和幅值ai(t)组成二维傅里叶频谱图;t、ωi(t)和ai(t)组成三维频谱图。
3 实例分析
苏通大桥位于南通市和常熟市之间,主要由北岸接线工程、跨江大桥工程和南岸接线工程三部分组成。大桥于2003-06开工,2008-06-30建成正式通车。大桥位于长江下游,受台风影向明显,且季节和日温差大,恶劣环境影响明显。
试验中采用3台Trimble 5700双频GPS接收机,其中,一台接收机作为基准点,要求观测环境好,视野开阔,周围无遮挡;另两台作为监测点分别设置在1/2和1/4跨处桥面护栏上。
数据采集时间在2014-01-22,取13:30:00~14:30:00的监测数据,监测时平均风速3~4级,温度在8.2~9.8 ℃。按动态观测模式连续观测,三个测站同步观测约1 h,卫星高度角限值设置为13°,采样频率为10 Hz。图2为y方向观测位移时程和FFT(Fast Fourier Transform)变换结果。

(a)原始数据 (b)FFT频谱图2 原始数据及FFT变换结果Fig.2 Original data and the result of FFT transform
由图2(a)可知,大桥横向位移受温度、车载等因素影响不明显,只与风等随机荷载有关。由图2(b)可知,被激发的主频率有要有3个。
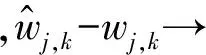
图3(a)对被噪声污染的原始信号进行EMD分解,共有13个IMF分量和1个趋势项r13;图3(b)为各分量FFT变换对应的频谱图。由频谱图可见,随着EMD分解的深入,各分量频谱中心逐渐左移;IMF1分量频谱占据整个频率轴,绝大部分是噪声,然后随分解层次的增加噪声慢慢减少。根据交叉证认方法计算得出前7个分量为噪声主导分量。为了对此进行验证,再计算了分解后的各分量自相系数和能量。其中IMF1~IMF7自相关系数较小,在0点达到最大,然后向两侧快速衰减。自相关系数计算和交叉证认计算结果相互印证,都表明IMF1~IMF7各分量由噪声主导。
(a)EMD分量 (b)FFT变换图3 大桥y方向位移EMD分解及各分量FFT变换Fig.3 EMD decomposition of the bridge displacement in the y direction and Fourier transform of each component
图4(a)为噪声信号通过小波阈值提取有用信号的部分;图4(b)为其对应的FFT频谱。滤波过程如下:小波阈值去噪,此处选用8 db小波基对IMF分量进行分解,分解层数由前面介绍的自适应方法计算;并对分解后的小波系数利用本文的阈值函数进行阈值处理,再根据小波逆变换进行信号重构,得到各IMF分量去噪后的信号。再利用去噪后EMD分量及信号主导分量和趋势项重构信号。由去噪后各分量频谱可见,去噪后各分量频率小于0.5 Hz,和图2原始数据FFT变换主频率所在区间一致,表明高频噪声基本被清除掉,说明本文提出的阈值函数去噪效果比较好。

(a)小波阈值去噪后各EMD分量 (b)去噪后EMD分量FFT频谱图4 小波阈值去噪后EMD分量及FFT变换Fig.4 The EMD components after the wavelet threshold de-noising and Fourier transform of each component
图5(a)为原始数据自适应小波阈值去噪后结果,图5(b)为直接弃掉噪声主导的EMD分解后的前7个分量后用剩余分量重构后得到的信号,图5(c)为对原始信号直接用小波去噪后重构得到的信号。由图5(b)可见,该方法显然去噪过于“彻底”,去噪的同时也丢掉了部分有用信息。小波去噪的效果不够稳定,主要取决于小波基和分解层数等,图5(c)可见小波直接去噪后信号抖动幅值比较厉害,表明还存在一定噪声,去噪不够彻底。
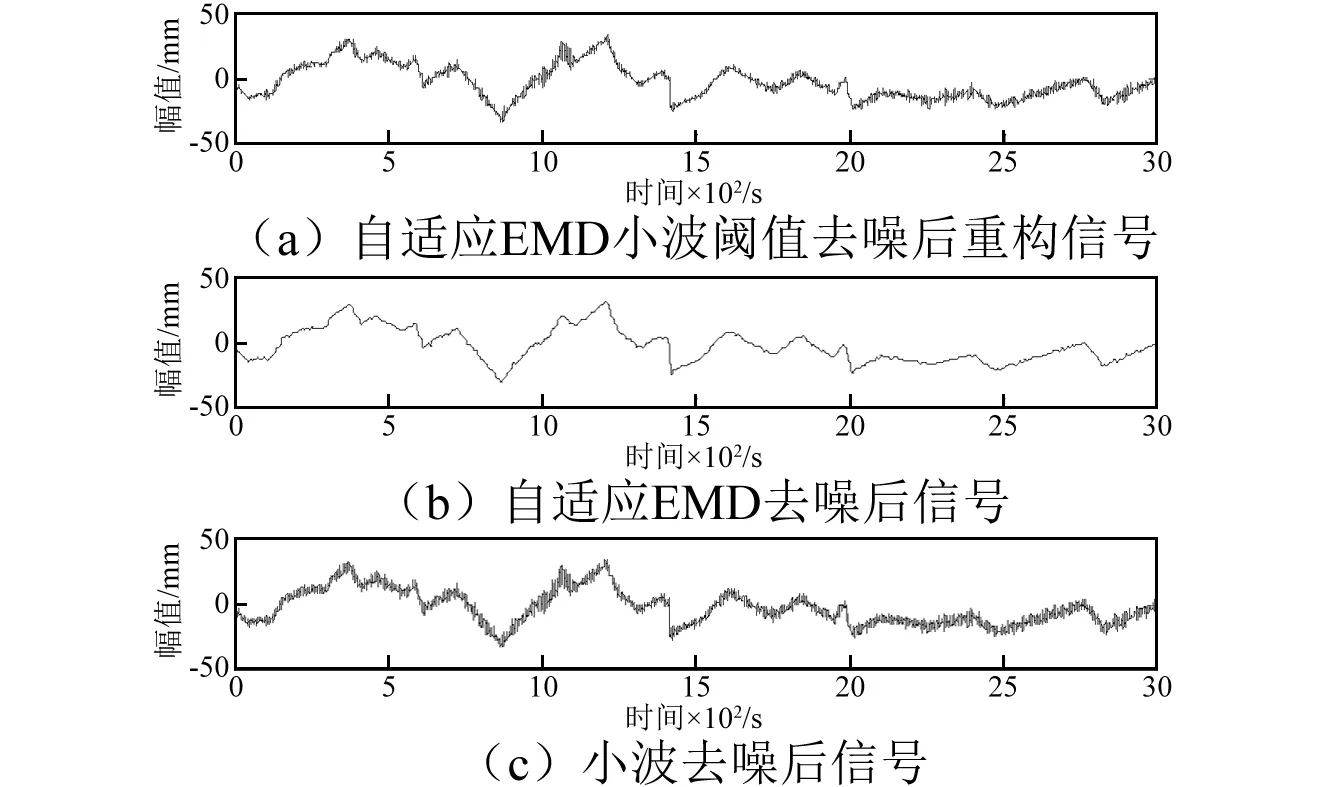
图5 三种方法去噪结果Fig.5 The de-noising results of three ways

由表1可见,小波去噪噪声方差较小,表明去噪不够彻底,而EMD去噪噪声方差较大,表明有过度去噪的可能。同时,自适应EMD小波去噪方法去噪后的信号与原信号的相关性最好,其信噪比也最大。

表1 不同去噪方法去噪效果
图6为原信号和去噪后信号经过HHT变换得到的瞬时二维频谱图。图中很明显有三条主频率线,但去噪前的图6(a)中充满了噪声干扰,图6(b)去噪后噪声基本已经很不明显,表明去噪效果较好。

(a)原信号HHT频谱 (b)自适应EMD小波去噪后 HHT频谱图6 去噪前及去噪后信号HHT频谱Fig.6 The signal HHT spectrum before and after de-noising
5 结 论
基于对大桥实测横向GPS动态位移数据,用自适应交叉证认EMD小波方法、EMD及小波滤波三种方法进行去噪处理研究,得到结论如下:
(1)交叉证认方法能够很好的自适应地给出EMD分解噪声主导分量与信号主导分量,并与其它验证方法相吻合。
(2)对于噪声主导的EMD分量,仍会含有少量有用信息,只有进一步提取出来信号才比较完整。目前大多处理方法是把噪声主导分量直接摒弃,这样会造成信号失真。本文对噪声主导分量进行了进一步的信号提取。
(3)对EMD噪声主导分量进行小波提取剩余信号的效果取决于小波基函数及阈值函数,本文提出了新的阈值函数,该阈值函数符合Lipschitz Exponents理论,具有连续及高阶可导的特性,并通过与其它方法相比较,表明该阈值函数能很好地提取噪声中的剩余信号。
(4)大桥振动有其固有频率,但其频率会随外界温度等因素影响而有一些变化;噪声的频谱范围很广,因此大桥去噪应该是带通去噪,即准确判断大桥当前主频,对由噪声主导的低频信号采用带通滤波器过滤,这样去噪效果可能更好,这需要进一步研究。
(5)交叉证认EMD小波去噪法通过二次去噪,在大桥动态监测中能去掉大部分噪声,同时很好保留了有用信号,是一种高效的大桥动态监测信号去噪方法。
[ 1 ] 李宏男,田亮,伊廷华,等. 大跨斜拱桥结构健康监测系统的设计与开发[J]. 振动工程学报,2015,28(4): 574-584.
LI Hongnan,TIAN Liang,YI Tinghua,et al.Design and development of structural health monitoring system for long span skew arch bridge[J]. Journal of Vibration Engineering,2015,28(4): 574-584.
[ 2 ] 夏坚,宗周红,杨泽刚,等. 基于GPS的大跨斜拉桥车辆荷载模型[J]. 中国公路学报,2016,29(1): 44-52.
XIA Jian,ZONG Zhouhong,YANG Zegang,et al.Vehicle load model of large-span cable-stayed bridge based on GPS[J]. China Journal of Highway and Transport,2016,29(1):44-52.
[ 3 ] 余加勇. 基于GNSS和RTS技术的桥梁结构健康监测[J]. 测绘学报,2015,44(10): 1177.
YU Jiayong. GNSS and RTS technologies based structural health monitoring of bridges[J]. Acta Geodaetica et Cartographica Sinica,2015,44(10): 1177.
[ 4 ] 余加勇,邵旭东,孟晓林,等. 基于自动型全站仪的桥梁结构动态监测试验[J]. 中国公路学报,2014,27(10):55-63.
YU Jiayong,SHAO Xudong,MENG Xiaolin,et al.Experiment of dynamic monitoring of bridge structures using robotic total station[J]. China Journal of Highway and Transport,2014,27(10): 55-63.
[ 5 ] 黄声享,杨保岑,张鸿,等. 苏通大桥施工期几何监测系统的建立与应用研究[J]. 测绘学报,2009,38(1): 66-72.
HUANG Shengxiang,YANG Baocen,ZHANG Hong,et al. Real-time dynamic monitoring with GPS and georobot during sutong bridge construction[J]. Acta Geodaetica et Cartographica Sinica,2009,38(1): 66-72.
[ 6 ] 黄声享,杨保岑,游新鹏. GPS动态几何监测系统在桥梁施工中的应用研究[J]. 武汉大学学报(信息科学版),2009,34(9): 1072-1075.
HUANG Shengxiang,YANG Baocen,YOU Xinpeng. Applications of GPS dynamic geometric deformation monitoring system to sutong bridge[J]. Geomatics and Information Science of Wuhan University,2009,34(9):1072-1075.
[ 7 ] 吴杰,胡夏闽,赵吉先,等. 测量机器人系统在苏通大桥动态监测中的应用研究[J]. 公路,2016(1): 81-85.
WU Jie, HU Xiamin, ZHAO Jixian, et al. Study on dynamic of sutong bridge based on georobot system[J]. Highway, 2016(1): 81-85.
[ 8 ] 邓扬,李爱群,刘扬,等. 基于监测数据的大跨度悬索桥频率与环境条件的相关性模型[J]. 中南大学学报(自然科学版),2014,45(7): 2401-2409.
DENG Yang,LI Aiqun,LIU Yang,et al.Correlation models of modal frequencies and environmental conditions for a long-span suspension bridge based on monitoring data[J]. Journal of Central South University(Science and Technology),2014,45(7): 2401-2409.
[ 9 ] 袁慎芳,梁栋,高宁,等. 基于结构健康监测系统的桥梁数据异常诊断研究[J]. 电子科技大学学报,2013,42(1):69-74.
YUAN Shenfang,LIANG Dong,GAO Ning,et al.The bridge data diagnosis research based on structral health monitoring system[J]. Journal of University of Electronic Science and Technology of China,2013,42(1): 69-74.
[10] 韩厚增,王坚,孟晓林. GPS与加速度计融合桥梁变形信息提取模型研究[J]. 中国矿业大学学报,2015,44(3):549-556.
HAN Houzeng,WANG Jian,MENG Xiaolin. Reconstruction of bridge dynamics using integrated GPS and accelerometer[J]. Journal of China University of Mining amp; Technology,2015,44(3): 549-556.
[11] 章浙涛,朱建军,匡翠林,等. 一种小波包混合滤波方法及其应用[J]. 武汉大学学报(信息科学版),2014,39(4): 471-475.
ZHANG Zhetao,ZHU Jianjun,KUANG Cuilin,et al.A hybrid filter method based on wavelet packed and its application[J]. Geomatics and Information Science of Wuhan University,2014,39(4): 471-475.
[12] 刘霞,黄阳,黄敬,等. 基于经验模态分解(EMD)的小波熵阈值地震信号去噪[J]. 吉林大学学报(地球科学版),2016,46(1): 262-269.
LIU Xia,HUANG Yang,HUANG Jing,et al.Wavelet entropy threshold seismic signal denoising based on empirical mode decomposition(EMD) [J]. Journal of Jilin University(Earth Science),2016,46(1): 262-269.
[13] 罗飞雪,戴吾蛟,伍锡锈. 基于交叉证认的EMD滤波及其在GPS多路径效应中的应用[J]. 武汉大学学报(信息科学版),2012,37(4): 450-453.
LUO Feixue,DAI Wujiao,WU Xixiu. EMD filtering based on cross-validation and its application in GPS multipath[J]. Geomatics and Information Science of Wuhan University,2012,37(4): 450-453.
[14] 夏楠,邱天爽,李景春,等. 一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J]. 电子学报,2013,41(1):148-152.
XIA Nan,QIU Tianshuang,LI Jingchun,et al.A nonlinear filtering algorithm combining the kalman filter and the particle filter[J]. Acta Electronica Sinica,2013,41(1): 148-152.
[15] 黄文肖,戴瑜兴,李加升. 基于cross-validation的小波自适应降噪方法[J]. 湖南大学学报(自然科学版),2008,35(11): 40-43.
HUANG Wenxiao,DAI Yuxing,LI Jiasheng. Adaptive wavelet denoising based on cross-validation[J]. Journal of Hunan University(Natural Sciences), 2008, 35(11): 40-43.
[16] 柏林,刘小峰,秦树人. 小波-形态-EMD综合分析法及其应用[J]. 振动与冲击,2008,27(5): 1-4.
BO Lin,LIU Xiaofeng,QIN Shuren. Hybrid wavelet-morphology-EMD analysis and its application[J]. Journal of Vibration and Shock,2008,27(5): 1-4.
[17] 杨世锡,胡劲松,吴昭同,等. 旋转机械振动信号基于EMD的希尔伯特变换和小波变换时频分析比较[J]. 中国电机工程学报,2003,23(6): 102-107.
YANG Shixi,HU Jingsong,WU Zhaotong,et al.The comparison of vibration signals’ time-frequency analysis between EMD-based ht and wt method in rotating machinery[J]. Proceedings of the CSEE,2003,23(6): 102-107.
EMD-waveletfilteringbasedoncross-validationanditsapplicationinbridgedynamicmonitoring
WU Jie1, HU Xiamin2, QIAO Yan1, YU Teng1, ZHU Shaoqi1, MA Jing1
(1. School of Civil Engineering and Architecture,Su Qian College, Suqian 223800,China;2. College of Civil Engineering, Nanjing Tech University, Nanjing 211816, China)
In order to filter out noise, an improved EMD-wavelet filtering method based on cross-validation was proposed for bridge dynamic displacement monitoring. At first, the signal was decomposed with the EMD-wavelet method, and then the dominant component of the noise was calculated with the cross-validation method adaptively, and finally the dominant component of noise was filtered with the wavelet threshold. It was very critical to select the function of thresholds. This paper proposed a new threshold function calculation method. Example analysis shows that the method can more effectively filter out noise and extracts bridge vibration information. It is a highly efficient de-noising method.
cross-validation; EMD-wavelet; wavelet threshold; bridge dynamic monitoring
国家自然科学基金项目(51078080);江苏省高校自然科学研究项目资助(13KJB420004);江苏省科技支撑(工业)项目 (BE2014026)
2016-06-24 修改稿收到日期: 2016-09-18
吴杰 男,硕士,副教授,1975年生
U446.2;P228.4
A
10.13465/j.cnki.jvs.2017.22.033
