LCL型并网逆变器的改进数字单环控制技术
2017-11-22万晓凤丁小华聂晓艺刘志宇胡海林余运俊
万晓凤,丁小华,聂晓艺,刘志宇,胡海林,余运俊
南昌大学信息工程学院,江西南昌 330031

【电子与信息科学/ElectronicsandInformationScience】
LCL型并网逆变器的改进数字单环控制技术
万晓凤,丁小华,聂晓艺,刘志宇,胡海林,余运俊
南昌大学信息工程学院,江西南昌 330031
建立逆变侧电流单环反馈控制LCL型并网逆变器数学模型,研究数字控制延时对系统稳定性的影响,得出系统稳定控制下的约束延时区间.为减小数字控制延时,通过前移脉宽调制比较寄存器装载时刻的方法,在未提高采样频率的情况下将采样延时减小为采样周期的1/2,使系统达到临界稳定状态;对比分析结果表明,采用参数优化的方法对传统相位补偿算法进行改进,在提高系统相位裕度的同时能降低系统高频增益,提高系统稳定性.仿真和实验结果验证了改进方法的有效性.
分布式电力技术;LCL型并网逆变器;单环控制;数字控制延时;脉宽调制;超前补偿器
为解决LCL滤波器欠阻尼问题,常采用无功率损耗的有源阻尼法(active damping, AD)[1].基于附加变量反馈的AD方案在模拟系统中达到了理想的控制效果[2-3],却在数字系统中受控制延时的影响可能失效,故仍需附加额外的延时补偿算法[4-6].为优化性能及降低成本,电流单环控制的延时补偿算法成为近年研究热点.邹常跃等[7-9]指出,受控制延时影响,逆变侧电流单环控制下系统相角裕度(phase margin,PM)可能不足甚至为负,且延时在谐振频率fres处的相位滞后值与延时大小及谐振频率与控制频率之比fres/fs呈正比[7].以延时为1.5倍控制周期Ts为例,当fres/fs处于(1/6,1/2]时,相位滞后导致系统在fres处的PM值为负值,此时系统恒不稳定.邹常跃等[7]通过优化代码执行及更改采样点角度的方式控制延时大小,但其所控制的延时区间有限,且忽略了较大延时对中低频率段相位造成的影响.张兴等[8-9]通过调整fres/fs改善系统稳定性,但在实际系统中fs受限于传感器精度及数字信号处理器(digital signal processing, DSP)运算速度,且过高的fs极易将开关谐波引入回路以致系统稳定性恶化[5],影响fres的L和C参数受系统额定功率的限制,调整范围依然有限.
本研究采用逆变侧电流单环控制,分析其在离散域下控制延时对系统稳定性的影响,指出延时不利于系统稳定性,故该方案下应减小延时.采用调整脉宽调制(pulse width modulation, PWM)更新时刻以减小延时及附加改进型超前补偿器以补偿相位滞后的方法,给出补偿器及电流控制器的参数设计方法.该算法能有效提升逆变侧电流单环控制数字系统的稳定性.
1 系统模型及稳定域分析
1.1 连续域模型
基于LCL滤波器的单相并网微逆变器拓扑如图1[2].其中,L1和L2分别为逆变侧和网侧滤波电感;C为滤波电容;Udc和Ug分别为直流母线电压和电网电压;iL1和iL2分别为逆变侧和网侧电流.为简单起见,忽略无源元件的寄生电阻.
就单电流反馈控制而言,iL1和iL2均可为反馈量[10].考虑到iL1控制利于保护逆变桥,本研究以iL1单环控制为研究对象.图2给出了该方案在连续域下的控制框图[7],可得iL1至参考电流iref的传递函数如式(1).
(1)

图1 LCL型的单相并网逆变器拓扑[2]Fig.1 Topology of LCL-type single phase grid-connected inverter[2]
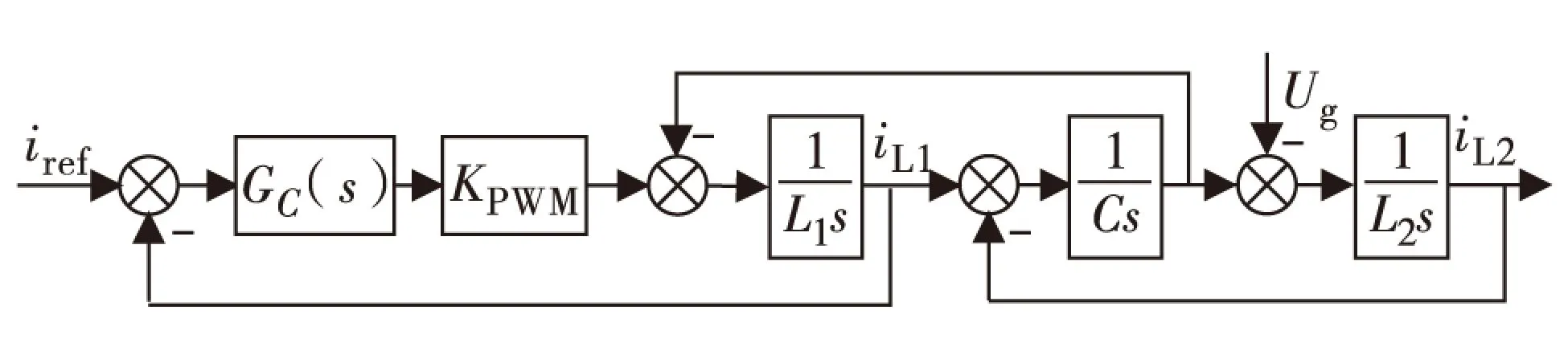
图2 逆变侧电流反馈控制连续域控制框图Fig.2 Control block diagram of continuous model of inverter-side current feedback control

1.2 离散域模型
典型PWM调制采用同步对称规则采样法,在每个开关时刻进行电流采样并更新控制信号,如图3[4].其中,T1为采样延时;T2为计算延时;Vm为调制波;Vtri为三角载波.控制信号更新时刻相对采样信号存在延时[11],称为控制延时Td, 其值为Ts. 另外,PWM调制存在零阶保持特性,其延时取为0.5Ts, 故系统总延时为1.5Ts. 为得到系统离散传递函数,考虑延时并采用零阶保持器法离散化式(1),得到式(2).
(2)
其中,z为z变换算子.
1.3 数字控制延时对系统稳定性的影响
为突出延时变化对系统稳定性的影响,本研究中LCL及控制参数均取固定值,频率之比约为1/4,母线电压Udc=350 V,电网有效电压Ug=220 V;电网频率f0=50 Hz;逆变侧电感L1=5 mH;网侧电感L2=1 mH;滤波电容C=0.22 μF;采样(控制)频率fs=50 kHz;逆变侧电感寄生电阻r1=0.93 Ω;网侧电感寄生电阻r2=0.3 Ω.图4为根据式(2)绘出离散系统的伯德图.由于无法避免PWM的延时效应,延时分别为取0.5Ts、Ts、 3.5Ts和4.5Ts.

图4 不同Td下GOPEN(z)的伯德图Fig.4 Bode diagram of GOPEN(z) with different Td
不考虑控制器的影响时,系统可能在开环截止频率fc处和正谐振峰f1~f2之间满足相位负穿越条件.由图4可知,延时为0.5Ts时系统未发生负穿越;增至Ts时系统将在f2处达到临界穿越状态;继续增至3.5Ts时,临界穿越频率减至f1, 且此阶段在fc处也可发生相位负穿越;此后当延时处于[3.5Ts,4.5Ts]时,在f1~f2不会发生相位负穿越;直至增至4.5Ts时,系统在f2处再次发生负穿越.由于系统不存在单位圆外的开环极点,也无相位正穿越情形,即正穿越次数为零,根据奈奎斯特稳定判据,系统稳定时负穿越次数一定为零,故系统谐振稳定的延时区间包含[0,Ts]和[3.5Ts,4.5Ts].
值得一提的是,延时过大造成系统稳定的开环截止频率骤降,严重影响系统的动态响应能力及低频段稳定性,如图4,故不予考虑.因此,稳定运行的延时区间应为[0,Ts], 且可知该区间内延时越小,系统在f2处PM愈大,即系统稳定裕度愈大,故应尽量减小该延时以提高系统稳定性[7-9].
2 控制策略分析及控制器设计
根据控制理论,通过大幅降低电流控制器的比例增益来衰减谐振峰,可避免谐振的发生[12].然而此时控制带宽显著下降,削弱了系统动态响应及低频谐波抑制能力,故不予考虑.就本系统而言,由于Td引入的相位滞后使系统PM下降直至失稳,减小延时是提升系统稳定性最直接的方法,但Td减小区间有限[5],而超前补偿器是提升系统PM最直接的方法,故本研究采用调整PWM更新时刻以减小延时并附加改进型超前补偿器来校正系统的相频特性的方法.本研究所提方法的控制框图如图5.
2.1 数字控制延时减小方法
典型PWM调制模式下,Td固定为Ts.若可保证T1、T2之和小于0.5Ts, 则控制信号更新时刻也可从波峰处移至波谷[9],如图3.对于减小T1和T2的方法,除了选取更高性能的传感器及DSP,也可通过将采样子程序移入运行速度更高的RAM或将与控制无关的代码移至控制周期的前部执行等[7].

图5 本研究方法控制框图Fig.5 Control diagram of the proposed method
控制信号更新时刻调整后,电流采样仍在每个开关周期的波峰处进行,而将DSP中控制信号更新时刻提前了0.5Ts. 在未提高采样频率及引入高频谐波的情形下,可将原来的Td由Ts降至0.5Ts.
2.2 超前补偿器的设计
针对控制延时,Dannehl 等[13]将延时简化为一阶滞后环节进行补偿,Wang等[14]采用线性预测器实现相位超前,但两者本质皆为超前补偿器.本研究分析两者与典型超前补偿器的差异,给出最优参数设计.典型超前补偿器经增益补偿后形式为
Glead(s)=(Ts+1)/(αTs+1)
(3)

当T=1.5Ts时,得到文献[13]中控制器的形式,而文献[14]中控制器经前向欧拉法反变换后形式为
G(s)=(2Tss+1)/(Tss+1)
(4)
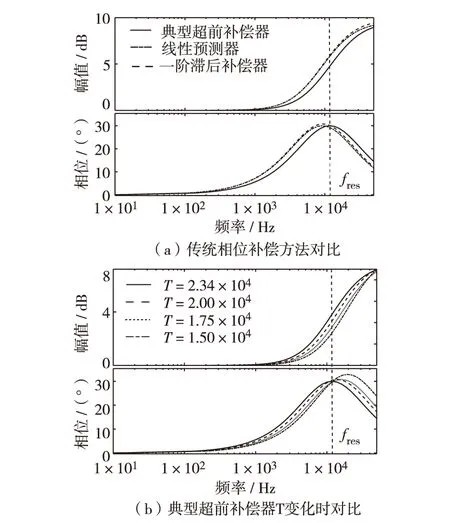
图6 基于超前补偿器的相位补偿方法伯德图Fig.6 Bode diagrams of phase compensation method based on lead compensator
为减小高频信号的放大作用,本研究取工程实践所需的最小PM,即θmax=30°. 因此可得α=1/3,T=2.34×10-5s,且1.5Ts=3.00×10-5s.图6(a)为上述补偿器的伯德图,可知相对典型超前补偿器,传统补偿器的θmax均向左偏移,且相对增益也更大,进一步限制了超前补偿器的应用范围.若减小T, 则中心频率可向右偏移,相对增益也会减小.取T=2.00×10-5s (α=1/3.05)、 1.75×10-5s (α=1/3.10)和1.50×10-5s (α=1/3.40), 此时3组参数均在谐振频率处取得30°超前角,如图6(b).
2.3 电流控制器参数设计
由于LCL滤波器的低频特性与L滤波器类似,故设计电流控制器时可等效为感值为L1+L2的L滤波器.本研究选取准PR控制器为[15]
(5)
其中,Kp为比例系数;Kr为谐振系数;ω0为基波角频率,取为100π;ωi为谐振项带宽,取ωi=π.
Kp取决于系统开环截止频率fc, 而fc又受限于系统的PM.通常为保证系统有足够的PM,需使fc<1/10fs[16-18].Kp值为
Kp=2πfc(L1+L2)/Udc
(6)
设fc=fs/10, 则Kp=0.55.Kr的取值需兼顾fc处的PM及电流稳态误差[19],本研究取Kr=75. 考虑电感寄生电阻r1和r2, 绘制出未校正系统的开环伯德图,如图7(a).此时系统在fres处PM和幅值裕度(gain margin,GM)均接近0.由1.3节分析可知,Td=0.5Ts时,系统在f2处的PM最小,故取为系统的PM,并取首次相位负穿越点处为系统GM.

图7 系统开环伯德图Fig.7 Bode diagram of the open loop system
为补偿超前补偿器的高频放大作用,本研究取Kp=0.25. 为防止离散化后准PR控制器谐振频率偏移,采用前向差分法和后向差分法结合的方法对式(5)进行离散化,得到其离散形式为[19]
GPR(z)=Kp+
(7)
就本系统而言,延时为1.5Ts时,系统需补偿的相角超过60°,故仅考虑延时为Ts下补偿器的效果对比,且取相同的Kp值.由图7可知,未补偿时系统在谐振频率处PM严重不足,采用传统补偿方法后PM有所提高,但仍未达到30°的工程要求,而改进后的补偿器,PM达35°,GM也有所提高,谐振抑制效果更佳.
2.4 鲁棒性分析
因延时引入的相位滞后为[7]
φdelay=(fres/fs)2π(λ+1/2)
(8)
传统数字控制中λ=1, 逆变侧电流单环控制临界稳定时fres/fs=1/6. 采用本研究方法,λ=0.5, 以超前补偿器最大超前角为60°计算,可得系统临时fres/fs=5/12, 改进后算法极大的提高了系统的稳定区间.另外,由于L、C及电网阻抗Lg的变化,fres也会发生偏移:若L、C或Lg增大,则由式(1)可知,fres减小有利系统稳定,但在一定程度上降低了控制带宽;反之,fres增大不利于系统稳定.图7(b)给出了C减小25%,Lg=2.6 mH[20-21]时的系统伯德图,验证了上述分析.可见,参数在一定程度内变化时,系统仍具有较好的稳定裕度.
3 仿真与实验验证
3.1 Simulink仿真验证
采用Matlab软件Simulink模块搭建如图1电路进行仿真,得到如图8的逆变侧电流反馈控制在延时为Ts下的仿真图.其中,图8(a)为无补偿控制并在0.030 s时切入寄生电阻;图8(b)和(c)为分别附加传统、改进型补偿器,并在0.045和0.065 s时分别进行满载与半载切换.可知仅将延时减小为Ts时,系统难以保持稳定.切入寄生电阻后,入网电流渐稳,但谐振明显,稳定裕度严重不足;引入传统补偿器后,谐振仍明显,且在负载变化时超调量较大;引入改进补偿器后,无明显谐振现象,超调量也大幅降低,表明改进算法下系统稳定性大幅提升.

图8 入网电流仿真波形Fig.8 The simulation waveforms of line current
图9为L1、L2及C变化时系统阶跃响应仿真图.由于谐振频率的升高有利于逆变侧电流反馈控制的稳定性,因而考虑使谐振频率上升的变化情形:分别减小L和C标称值的25%,对应的谐振频率分别上升2.7%、15.5%和13.0%.可知参数扰动下,系统仍具有较好谐振抑制能力及动态响应能力,表明鲁棒性较强.

图9 LCL参数扰动下入网电流仿真波形Fig.9 The simulation waveform of line current under disturbance of LCL parameters
3.2 实验验证
为验证上述分析及仿真所得结论,在单相并网微逆变器上进行实验验证,主控芯片采用TI公司的DSP系列TMS320F28035.实验参数亦如1.3节所列,结果见图10.由图10(a)可知,仅将Td减至0.5Ts时,系统本身的阻尼可使系统稳定运行,但入网电流仍存在明显谐波.而在附加超前补偿器后,入网电流得到明显改善.其中,图10(b)和(c)为未改进与改进后补偿器下的入网电流波形,可见未改进补偿器引入了高频噪声,不利于系统的稳定运行.图10(c)入网电流的总谐波失真(total harmonic distortion,THD)为2.6%,谐振谐波含量低于0.3%,达到并网要求.

图10 并网电流满载稳态实验波形Fig.10 The experimental waveforms of line current under full load steady state
图11为系统满载与半载之间互相切换的动态过程.可知,负载切换过程中,电流跟踪效果仍很好,极短时间内即跟踪到新电流参考值,且超调量较小,与仿真结果吻合,表明本方法有效.

图11 入网电流满载与半载之间的跳变Fig.11 The experimental transient response of line current with reference current changing
结 语
本研究分析逆变侧电流单环控制在控制延时影响下的特性,指出延时会减小其相位裕度甚至导致不稳定.采用调整控制信号更新时刻的方法减小系统延时、附加改进型超前补偿器补偿系统相位滞后的方法,提高系统稳定性.尽管该方法将fres临界稳定值从1/6fs提高到5/12fs, 略小于LCL谐振频率的理论设计上限1/2fs. 但其原理简单,无需附加额外的传感器及复杂的控制算法,降低了系统成本,在工程实践中具有一定应用价值.后续研究将围绕继续提升临界稳定频率至设计上限值.
引文:万晓凤,丁小华,聂晓艺,等.LCL型并网逆变器的改进数字单环控制技术[J]. 深圳大学学报理工版,2017,34(6):577-583.
/
[1] Chi Zhang, Dragicevic T, Vasquez J C, et al. Resonance damping techniques for grid-connected voltage source converters with LCL filters: a review[C]// IEEE International Energy Conference. Cavtat, Croatia: IEEE, 2014: 169-176.
[2] 许津铭,谢少军,肖华锋.LCL滤波器有源阻尼控制机制研究[J].中国电机工程学报,2012,32(9):27-33.
Xu Jinming, Xie Shaojun, Xiao Huafeng. Research on control mechanism of active damping for LCL filters[J]. Proceedings of the CSEE, 2012, 32(9): 27-33.(in Chinese)
[3] Bao Chenlei, Ruan Xinbo, Wang Xuehua, et al. Step-by-step controller design for LCL-type grid-connected inverter with capacitor-current-feedback active-damping[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1239-1253.
[4] Pan Donghua, Ruan Xinbo, Bao Chenlei, et al. Capacitor-current-feedback active damping with reduced computation delay for improving robustness of LCL-type grid-connected inverter[J]. IEEE Transactions on Power Electronics, 2014, 29(7): 3414-3427.
[5] Yang Dongsheng, Ruan Xinbo, Wu Heng. A real-time computation method with dual sampling modes to improve the current control performance of the LCL-type grid-connected inverter[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4563-4572.
[6] Wagner M, Barth T, Alvarez R, et al. Discrete-time active damping of resonance by proportional capacitor current feedback[J]. IEEE Transactions on Industry Applications, 2014, 50(6): 3911-3920.
[7] 邹常跃,刘邦银,段善旭,等.并网逆变器中数字控制延时对系统稳定性的影响及其优化设计[J].中国电机工程学报,2015,35(2):411-417.
Zou Changyue, Liu Bangyin, Duan Shanxu. Influence of delay on system stability and its optimization in grid-connected inverters[J]. Proceedings of the CSEE, 2015, 35(2): 411-417.(in Chinese)
[8] 张 兴,陈 鹏,余畅舟,等.LCL滤波并网逆变器逆变侧电流多次采样的单闭环控制策略[J].电力系统自动化,2016(11):87-92.
Zhang Xing, Chen Peng, Yu Changzhou, et al. Single closed-loop strategy based on multi-sampled inverter side currents for grid-connected inverters with LCL filters[J]. Automation of Electric Power Systems, 2016(11): 87-92.(in Chinese)
[9] 盘宏斌,欧思程,刘林海,等.LCL型并网逆变器数字单环控制延时影响与稳定域分析设计[J].电力系统自动化,2016,40(6):85-90.
Pan Hongbin, Ou Sicheng, Liu Linhai, et al. Influence on delay and stable domain analysis and design based on digital single-loop control of grid-connected inverter with LCL-filter[J].Automation of Electric Power Systems,2016,40(6): 85-90.(in Chinese)
[10] Wang Jianguo, Yan Jiudun, Zou Jiyan. Inherent damping of single-loop digitally controlled voltage source inverters with LCL filters[J]. IEEE, International Symposium on Industrial Electronics, 2016:487-492.
[11] Zhang Xiaotian, Spencer J W, Guerrero J M. Small-signal modeling of digitally controlled grid-connected inverters with LCL filters[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3752-3765.
[12] Dannehl J, Liserre M, Fuchs F W. Filter-based active damping of voltage source converters with filter[J].IEEE Transactions on Industrial Electronics, 2011, 58(8): 3623-3633.
[13] 许津铭,季 林,葛小伟,等.计及逆变器侧电流反馈影响的LCL滤波器参数优化设计[J].中国电机工程学报,2016,36(17):4656-4664.
Xu Jinming, Ji Lin, Ge Xiaowei, et al. LCL-filter optimization design with consideration of inverter-side current feedback control impacts[J]. Proceedings of the CSEE, 2016, 36(17): 4656-4664.(in Chinese)
[14] Wang Jianguo, Yan Jiudun, Jiang Lin, et al. Delay-dependent stability of single-loop controlled grid-connected inverters with LCL filters[J]. IEEE Transactions on Power Electronics, 2015, 31(1): 743-756.
[15] Jalili K, Bernet S. Design of filters of active-front-end two-level voltage-source converters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5): 1674-1689.
[16] 李泽斌,罗 安,田 园,等.LCL型光伏并网逆变器电流内环控制方法[J].电网技术,2014,38(10):2772-2778.
Li Zebin, Luo An, Tian Yuan, et al. Inner current loop control method for photovoltaic grid-connected inverter with LCL filter[J].Power System Technology, 2014, 38(10):2772-2778.(in Chinese)
[17] Pan Donghua, Ruan Xinbo, Wang Xuehua, et al. Analysis and design of current control schemes for LCL-type grid-connected inverter based on a general mathematical model[J]. IEEE Transactions on Power Electronics, 2017, 32(6): 4395-4410.
[18] Yepes A G, Vidal A, Malvar J, et al. Tuning method aimed at optimized settling time and overshoot for synchronous proportional-integral current control in electric machines[J]. IEEE Transactions on Power Electronics, 2014, 29(6): 3041-3054.
[19] 阚加荣,谢少军,吴云亚,等.逆变器侧电流反馈的LCL滤波并网逆变器参数设计[J].电力系统自动化,2013,37(17):119-124.
Kan Jiarong, Xie Shaojun, Wu Yunya, et al. Parameter design of LCL filter grid-connected inverter using inverter-side current feedback strategy[J].Automation of Electric Power Systems,2013, 37(17): 119-124.(in Chinese)
[20] Pan Donghua, Ruan Xinbo, Bao Chenlei, et al. Optimized controller design for LCL-type grid-connected inverter to achieve high robustness against grid-impedance variation[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1537-1547.
[21] Liserre M, Teodorescu R, Blaabjerg F. Stability of photovoltaic and wind turbine grid-connected inverters for a large set of grid impedance values[J]. IEEE Transactions on Power Electronics, 2006, 21(1): 263-272.
【中文责编:方圆;英文责编:木柯】
2017-01-10;Accepted2017-05-09
Professor Wan Xiaofeng. E-mail: xfwan_jx@163.com
Animproveddigitalsingle-loopcontrolschemeforgrid-connectedinverterswithLCLfilter
WanXiaofeng,DingXiaohua,NieXiaoyi,LiuZhiyu,HuHailin,andYuYunjun
Information Engineering School, Nanchang University, Nanchang 330031, Jiangxi Province, P.R.China
We establish a mathematical model of LCL-type grid-connected inverter with single-loop control of the inverter-side current and obtain the constraint delay interval of stable system by analyzing the relationship between the digital control delay and system stability. In order to reduce the digital control delay, we decrease the sampling delay from one sampling period to 1/2 sampling period and make the system reach the critical stable state without increasing the sampling frequency by moving forward the register loading time of the pulse width modulation. It is found that compared with the traditional compensation algorithm based on lead-leg compensator, the adoption of parameter optimization method in this paper can not only improve phase margin, but also reduce the high frequency gain of the system, thus increasing stability of the system. The experimental results demonstrate the feasibility of the proposed control strategy.
distributed power technology; LCL-type grid-connected inverter; single-loop control; digital control delay; pulse width modulation; lead-leg compensator
Foundation:National International Cooperation Foundation of Science and Technology of China(2014DFG72240);Science and Technology Land Plan of Jiangxi Province(KJLD14006); Graduate Innovation Foundation of Jiangxi Province(YC2016-S009)
:Wan Xiaofeng, Ding Xiaohua, Nie Xiaoyi, et al. An improved digital single-loop control scheme for grid-connected inverters with LCL filter[J]. Journal of Shenzhen University Science and Engineering, 2017, 34(6): 577-583.(in Chinese)
TM 46
A
10.3724/SP.J.1249.2017.06577
国家国际科技合作专项资助项目(2014DFG72240);江西省高等学校科技落地计划项目( KJLD14006);江西省研究生创新专项资金资助项目(YC2016-S009))
万晓凤(1964—),女,南昌大学教授、博士生导师.研究方向:分布式发电与微电网、储能及其应用研究.E-mail:xfwan_jx@163.com
