星敏感器低频误差与陀螺漂移离线校正方法
2017-11-20赵琳谢睿达刘源郝勇
赵琳, 谢睿达, 刘源, 郝勇
哈尔滨工程大学 自动化学院, 哈尔滨 150001
星敏感器低频误差与陀螺漂移离线校正方法
赵琳, 谢睿达*, 刘源, 郝勇
哈尔滨工程大学 自动化学院, 哈尔滨 150001
获取高精度事后姿态数据是提高遥感平台成像质量的必要条件之一,离线处理可有效降低敏感器测量误差,从而获得更高的姿态确定精度。基于滤波的校正方法中,星敏感器低频误差(LFE)与陀螺漂移将产生耦合影响导致校正精度低,本文针对该问题推导了耦合误差的数学模型,并设计了一种两步双向平滑事后处理算法,将陀螺漂移与低频误差分两步校正,通过反复滤波剥离陀螺漂移与低频误差。同时,针对低频误差参数收敛速度慢、噪声参数调节困难的问题,利用一种基于极大似然估计(MLE)的固定窗口自适应双向滤波算法进行处理以获得更好的噪声估计,提高了收敛速度和收敛精度。文中仿真工况下,离线姿态确定精度可达到0.8″(3σ),低频误差参数完全收敛时间不超过4个轨道周期。
星敏感器; 低频噪声; 陀螺漂移; 卫星姿态测量; 事后处理; 姿态敏感器误差标定
现代对地观测卫星中,姿态确定精度直接影响遥感图像处理质量,而事后姿态处理往往可获得较高的姿态确定精度,因此能够高精度地进行事后姿态确定对遥感卫星至关重要。以先进对地观测卫星(Advanced Land Observing Satellite, ALOS)为例:精确指向与地理定位系统(Precision Pointing and geolocation Determination System,PPDS)是ALOS的地面子系统之一,由于不存在在轨计算量、实时性等约束,其可以实现高精度的卫星姿态与指向修正。根据现有资料[1-2],其地球观测中心(Earth Observation Center,EOC)可下载至少24 h的低速任务数据及来自跟踪与控制中心(Tracking And Control Center,TACC)的定位数据。PPDS主要实现以下功能:星敏感器误差校正、事后姿态处理、热变形建模与估计等。ALOS的典型在轨精度为(±3×10-4)°(3σ),而通过事后处理,其姿态精度可提高一倍以上,为(±1.4×10-4)°(3σ),此外,指向精度、稳定度经事后处理均有提升。
诸多学者对卫星姿态的事后处理进行了研究,主要研究对象包括卫星姿态敏感器误差的事后补偿和卫星姿态数据后处理等。事后处理主要是利用了处理时可以利用全部时间的测量数据、计算量不受限制等特性。Iwata等[3-5]针对ALOS数据事后处理进行了较全面的阐述,其主要通过对陀螺漂移的补偿和星敏感器星图再处理提高姿态精度。Lei和Yang[6]利用RTS(Rauch-Tung-Striebel)算法处理扩展卡尔曼滤波(EKF)姿态算法的数据。Yang和Lei[7]参考了Sarkka的部分成果[8]研究了利用无迹卡尔曼滤波(UKF)姿态确定算法配合RTS算法,形成URTS固定区间平滑算法,但未考虑敏感器误差补偿,仅对事后姿态数据进行了RTS处理,其处理精度低于Iwata的处理精度[4]。以上学者主要是针对滤波中的姿态误差或陀螺漂移进行平滑处理,但没有考虑到星敏感器低频误差(LFE)带来的影响。
星敏感器是星上精度最高的敏感器,但由于受到岁差、章动、低频误差等影响,其精度会受到很大影响,其中低频误差分量可达到十几至几十角秒,且该误差难以在轨消除,一般通过事后处理方可消除[9]。针对低频误差,熊凯等在文献[10]中提出的在轨校准方法精度有限;在文献[11]中提出的一种基于多模型自适应估计的算法,估计效果较好,但该算法理解性差,滤波参数调节复杂;在文献[12]中提出的基于地标信息的方法受到地标信息不准确、载荷误差的影响,校正精度有限。Schmidt等[13]提出用多项式拟合星敏感器四元数来提取低频误差,但受多项式精度限制,简单拟合效果不理想。Lai等对实验四号卫星安装的Astro10星敏感器进行系统校正,利用Vondrak滤波的方法进行处理,取得了较好的效果[14-15]。文献[16]分别讨论了星敏感器和陀螺的在轨标定,但没有对低频误差和陀螺漂移之间的耦合影响进行分析。综上,以上文献基本利用了滤波的方法对低频误差进行校正,但均没有考虑陀螺漂移与低频误差校正间的相互影响,且对滤波器的性能研究不深入。本文针对以上不足探讨以下内容:对滤波过程中低频误差参数与陀螺漂移间的耦合影响进行了推导,给出了具体的数学表达和分析;设计了一种两步双向平滑算法,剥离低频误差与陀螺漂移误差;针对低频误差参数在滤波中调参难、收敛难的问题,提出一种基于极大似然估计(MLE)固定时间窗口的双向自适应平滑算法。
1 低频误差参数与陀螺漂移估计过程分析
1.1 低频误差建模
低频误差的成因较多,根据文献[9,17-18],低频误差是由星敏感器光轴指向的周期性变化造成的,其中指向变化是由周期性的热弹性形变结合热滞后效应形成的。低频误差基本是以轨道周期呈现的规律未知的误差,根据文献[10-12,19],本文采用傅里叶级数对低频误差轮廓进行描述(如式(1)所示),利用傅里叶级数一方面可以有效拟合低频误差,另一方面低频成分可控,便于评价算法效能。
(1)
式中:Θx为x轴低频误差;a、b为傅里叶系数;ωorbit为轨道角速度;i为信号为轨道周期的若干倍频;k为仿真步数;τ为仿真步长。
低频误差体现在星敏感器坐标系下,通过式(2)转换至卫星本体系下。

(2)

1.2 低频误差与陀螺漂移影响分析
对于基于滤波的方法,需要对估计过程中可能产生的影响因素加以分析。低频误差参数估计过程中,由于星敏感器本身带有低频误差,因此利用该信息为基准不能剥离出误差参数;而陀螺信息与低频误差参数是不相关的,因此可以用陀螺信息作为基准。本节参考文献[19]的思路,对同时估计和分别估计陀螺漂移和低频参数时,二者间的相互影响进行了数学分析。
若状态量选取为X=[δqδbδκ]T,δq为四元数偏差,δb为漂移,δκ为低频参数,且
(3)
状态量选取为估计值与真实值之间的偏差,则非线性系统在线性化、离散化过程后,可建立如式(4)所示的状态方程与观测方程。
(4)
式中:Qk为系统噪声;Rk为量测噪声;且
(5)
(6)
(7)
其中:ci,k,si,k(i=1,2,…,n)为傅里叶级数的余弦和正弦分量。
假定新息序列υk与预测残差ρk为小量,则有
(8)
且有
δqk-δqk/k-1=ρk
(9)
由观测方程得
Zk=HkXk+Rk=δqk+φkδκk+Rk
(10)
同时,由式(8)得
(11)
将式(8)中的Zk代入式(10),得
(12)
由状态方程得
(13)
将式(9)和式(12)中的k时刻推进至k+1,并代入式(13),得
(14)
为了得到低频误差参数与陀螺漂移之间的关系,应尽量将四元数消除,由状态方程得

(15)
将式(15)和式(12)代入式(14),消除带四元数的项,并分别将低频误差参数与陀螺漂移整理至等式右侧,得
Qq,k-Qq,k-1-υk+Rk-ρk}
(16)

Qq,k+υk+1-Rk+1+ρk+1}
(17)
式(16)右侧第2项代表了陀螺漂移估计偏差对低频误差参数估计的影响,第3项代表其受到前一时刻低频误差参数估计不准确的影响,第4项则为与卫星机动有关的误差项;式(17)中也可明显分析出陀螺漂移估计受到低频误差影响。
Qq,k+1+Qq,k+υk+1-Rk+1+ρk+1]
(18)
由式(18)可以看出,低频误差将直接影响陀螺漂移,右侧第2项为低频误差变化带来的影响,第3项为与卫星机动角速度相关的误差分量。
由式(8)得
(19)
在滤波器内部,观测量由式(20)计算。

(20)


(21)

将式(21)代入式(20),得

(22)
与式(8)对照,可得
υk=δqϑ b,k/k-1+δqo
(23)
由式(23)可得陀螺漂移对低频误差分量估计的影响如式(24)所示。
Qq,k+1-Qq,k+Rk+1-ρk+1}
(24)
式(24)中,第4项、第5项中的υk和υk+1分别代表了未校准的陀螺漂移残差对低频误差估计的影响,第4项与卫星机动相关,第5项则与低频误差各阶分量的幅值有关。
由上述推导可得,低频误差参数估计与陀螺漂移估计是两个相互影响的过程,将二者分开估计或同时估计都会造成估计不准确。但是,分开估计较同时估计更为合理。首先,低频误差规律以轨道为周期,因此参数至少需要一轨甚至多轨的时间才能得到较好的收敛,但陀螺漂移估计收敛则较为迅速,一旦存在星敏感器信息,即可在较短时间内收敛。其次,陀螺漂移事后处理可通过反复平滑获得均方差较小的估计值,而低频误差参数则仅需要一次平滑处理即可,因此同时估计将造成极大的不方便。最后,低频误差参数会使状态量成倍递增,且部分高阶参数相对于陀螺漂移估计量级较低,滤波过程中漂移误差对其造成的影响较大,甚至出现发散的现象。综上,设计合适的策略将二者分开估计更有优势。
2 低频误差与陀螺漂移离线高精度校正
2.1 算法流程概述
低频误差与陀螺漂移分两步校正的算法流程如图1所示。用本文所提出的低频误差与陀螺漂移高精度事后校正方法获得陀螺与星敏感器原始数据后,首先不考虑低频误差进行反复平滑漂移估计,此阶段需进行多次平滑获得漂移估计值;而后利用经过校正的角速度测量数据与星敏感器原始数据进行低频误差参数估计,此阶段只需要一次平滑以获得收敛精度较高的估计值。上述过程重复多次,直至获得较好的误差估计,即频域上陀螺漂移估计与星敏感器输出均不含有低频分量。需要注意的是,为了保证足够的低频误差轮廓以获得低频误差参数估计值,在每轮循环的低频参数估计阶段均使用星敏感器输出的原始数据;同理为使陀螺漂移估计尽量小地受低频参数的影响,在陀螺漂移估计过程中使用的是上一轮循环校正过的星敏感器姿态数据。

图1 低频误差与陀螺漂移离线估计方法 Fig.1 Offline estimation method of low frequency error (LFE) and gyroscope drift
2.2 基于固定区间平滑的陀螺漂移精准估计算法
平滑是卫星数据事后处理的基本思想[3],本节将对陀螺漂移平滑过程进行推导。
1) 前向滤波
首先利用姿态运动学进行预测:

(25)
(26)

2) 后向滤波
后向滤波过程与前向滤波类似,将下标f替换为b,前向滤波通过k-1时刻预测k时刻值,后向滤波则利用k+1时刻预测k时刻值,相应公式按照该思路进行修改。
前向滤波状态量X初值一般取0,即姿态与陀螺漂移估计初始时刻为零,噪声协方差阵P按照经验设定初值,因此需要一定时间达到收敛状态,而后向滤波初值则取前向滤波终值,即
(27)
因此后向滤波状态量X及噪声协方差阵P在后向滤波初始时刻均有较高质量的估计。
3) 权值融合

(28)
式中:
(29)
同时,可以求得前后向漂移估计差为
(30)
则前后向滤波产生的状态量误差可表示为
(31)
平滑后的均方误差为
(32)
(33)
令
(34)
则利用平滑四元数偏差对后向姿态估计进行修正:
(35)
平滑后的陀螺常值漂移:
(36)
平滑后得到的陀螺漂移用于补偿当前三轴角速度并用于下一次平滑,平滑得到的最终漂移则补偿低频误差阶段使用的三轴角速度数据。
2.3 基于MLE自适应双向滤波的低频误差离线校正算法
1) 低频误差与陀螺漂移先验补偿

2) 自适应双向卡尔曼滤波平滑
前向卡尔曼滤波过程与陀螺平滑过程运算相类似,不同之处在于,滤波状态量扩展为
(37)
则观测矩阵为
(38)
为取得良好的收敛效果,在原有EKF的观测量中需剔除估计的低频误差分量:
(39)
(40)
式中:Κ为欧拉角姿态转换为四元数姿态的转换矩阵。在仿真研究中发现,由于低频误差的噪声特性是未知的,且参数量级相差大,在滤波的过程中,噪声参数调节复杂,经常出现激励不当导致的发散现象。因此推导一种基于更新序列残差的MLE自适应双向滤波方法,以提高收敛时间和收敛精度。
推导前有以下假设:
假设2状态转移矩阵Φ及观测矩阵H独立于α,即∂Hk/∂α=0,∂Φk/∂α=0。
假设3更新残差序列为白噪声序列。
假设4更新残差序列是与α相关的变量,即∂ΡδXk/∂α≠0。
在k时刻,与自适应变量α相关的测量概率密度函数为[12]
(41)
式中:m为测量值的数量;Pγk为残差序列的协方差矩阵;γk为残差序列。本文中,自适应参数α为噪声方差矩阵的对角线元素,如:αi=Rii或αi=Qii。为方便推导,对式(41)两边同时取对数,并同时乘以-2,则MLE过程中求取Ρ的最大解变为求解式(42)右侧的最小值。
(42)
考虑到内存、运算量及新的姿态测量更新数据的比重问题,即使是在事后运算中,也不必取全部时间的数据进行运算,因此采用开窗法,采用时间长度为N的观测窗口进行计算,因此MLE准则有如式(43)所示的形式。
(43)
式中:p为当前时刻。
对式(43)两边分别求取参数α的偏导数,通过变换有
(44)
由式(44)可知,MLE自适应滤波中需要调整的参数项为α和残差序列γk,但这两个参数的调整较为抽象,因此要将这两个变量与调整系统噪声Q与星敏量测噪声R联系起来。以下进行推导。
已知[20]
(45)
且有
(46)
将式(46)代入式(45),并求偏导,得
(47)
认为选定的观测k窗口长度可以使低频误差参数与四元数矢量部分达到稳定,因此状态转移矩阵相关的影响为零,因此有
(48)
将式(48)代入式(44)中,推导出如式(49)所示的基于更新残差序列的MLE自适应滤波参数调整准则。
(49)
当只对R进行调节时,假设Q为无关向量,即∂Qk/∂α=0,那么取αi=Rii,则有
(50)
利用式(51)求测量噪声替代固定值。
(51)
(52)

Qk=ΡδXk+Pk-ΦPk-1ΦT
(53)
其中:
(54)
δXk=Kkυk
(55)
其中:Kk为卡尔曼增益矩阵。式(37)~式(55)即基于MLE的前向自适应滤波参数调整流程。由于噪声估计准确,因此算法运行效率高、收敛性好。
值得注意的是,由于后向滤波初值即采用前向滤波终值,因此后向滤波不需要该自适应方法进行调节。
3 基于噪声方差阵的权值融合
将式(31)前后向状态估计误差修改为
(56)
得到平滑补偿信息后,姿态四元数仍按照式(35)补偿,低频误差按照式(57)进行估计。
(57)
与陀螺漂移反复平滑不同,低频误差参数估计仅进行一次融合获得更精确的收敛值,而非将反复平滑的结果叠加,其目的是要在陀螺漂移估计阶段消除星敏感器低频误差的影响,直至陀螺漂移与低频误差能够准确地剥离。
4 仿真结果
卫星轨道周期为90 min,陀螺信息输出频率为4 Hz,三轴常值漂移分别设置为[0.8 1.0 1.2]T(°)/h,常值漂移噪声均方差为0.02 (°)/h;相关漂移初值为[0.1 0.1 0.1]T(°)/h,相关漂移噪声均方差为0.1 (°)/h,相关时间常数为1 h,随机噪声为0.01 (°)/h,星敏感器输出频率为1 Hz,低频参数值的选取基于某遥感卫星星敏感器测量数据提取的低频轮廓,针对该组参数,信噪比设置为95,其他影响误差以0.1″(3σ)的白噪声代替。
陀螺测量数据按照式(58)所示的测量模型产生。
ωm=ω+b+d+ηg
(58)
式中:ωm与ω分别为陀螺测量值及卫星三轴真实角速度;b为常值漂移;d为时间相关漂移;ηg为陀螺测量随机噪声,假设为均匀分布的高斯白噪声。本文在陀螺建模阶段,没有考虑陀螺在轨运行时的周期性漂移。由于本文将陀螺漂移与低频误差分别迭代计算,因此即使陀螺存在周期性漂移,本文所提出的算法仍然能够将陀螺周期性误差与低频误差分离。
图2为含低频误差的星敏感器输出曲线,图3 为不考虑低频误差的陀螺漂移估计频谱。由图2 和图3可以看出,当不考虑低频误差时,漂移估计中存在幅值较大的低频误差,使得陀螺漂移估计具有较大的均方差,该仿真结果验证了本文式(18)得出的结论:不考虑低频误差时,低频误差对陀螺漂移估计造成较大影响。
图4给出了未考虑陀螺漂移残差时1阶、5阶傅里叶参数估计的情况。如图4所示,1阶傅里叶参数虽然收敛,但由于陀螺漂移残差的影响,其仍然有振荡的趋势,5阶傅里叶参数量级较小,因而图4(b)中这种振荡体现得较为明显。
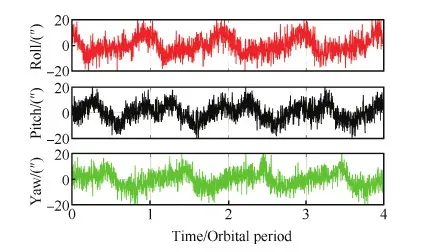
图2 含低频误差的星敏感器输出 Fig.2 Star sensor output with LFE

图3 未考虑星敏感器低频误差的陀螺漂移估计频谱 Fig.3 Spectrum of gyroscope drift estimation without considering star sensor LFE

图4 未考虑陀螺漂移的低频误差参数估计 Fig.4 LFE parameter estimation without considering gyroscope drift
根据上述参数估计对星敏感器进行校正时,获得如图5所示的校正结果,校正残差幅值约为2″,低频误差未得到很好的校正,由图5(b)可以看出,三轴姿态频谱中,低频误差分量虽然得到抑制,但未能消除。以上仿真结果验证了式(24)中陀螺漂移残差将影响低频误差估计的结论。
文献[10]提出将低频误差参数与陀螺漂移一同估计,本文对该方法进行了仿真分析,评价估计效果时取第8~10轨达到稳态时的数据进行分析。如图6所示,将低频误差参数与陀螺漂移一同估计时,由于对陀螺漂移一同进行了估计,因此收敛效果优于单独估计低频误差的情况,但参数收敛后仍有振荡,且参数收敛周期较长。
图7为同时估计漂移和低频误差时的卫星姿态估计结果。如图7(a)所示,随着低频误差参数与陀螺漂移估计参数的逐渐收敛,姿态确定误差越来越小,但如图7(b)所示,即使达到算法收敛的状态,任然无法消除全部低频误差,姿态信息中仍有以轨道周期或其倍频分量为周期的较大的低频误差。
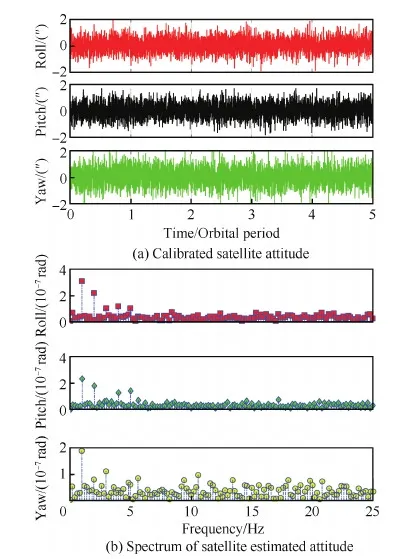
图5 仅考虑低频误差时卫星三轴姿态的校正结果 Fig.5 Results of satellite 3-axis attitude calibration considering only LFE
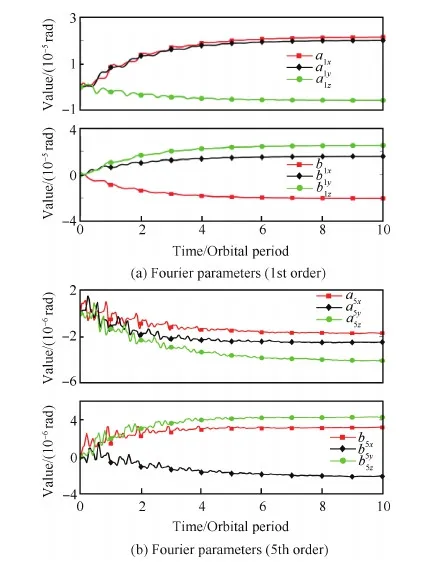
图6 同时估计陀螺漂移和低频误差参数时的低频误差估计结果 Fig.6 LFE estimation results when gyroscope drift and LFE parameters are estimated simultaneously
如图8所示,由于低频误差参数与陀螺漂移一同估计,而低频参数收敛时间长,导致陀螺漂移收敛时间长,且陀螺在初始阶段振荡剧烈,振荡幅值达到了±3 (°)/h,且收敛后频谱分析显示,仍有幅值约为0.01 (°)/h的低频误差残余,校正精度有限。
上述仿真结果证明了式(3)~式(17)数学分析的正确性,即一同估计误差将会降低估计精度,且会导致陀螺收敛周期变长。仿真数值结果如表1 和表2所示。

图7 同时估计陀螺漂移和低频误差参数时卫星姿态的估计结果 Fig.7 Satellite attitude estimation results when gyroscope drift and LFE parameters are estimated simultaneously
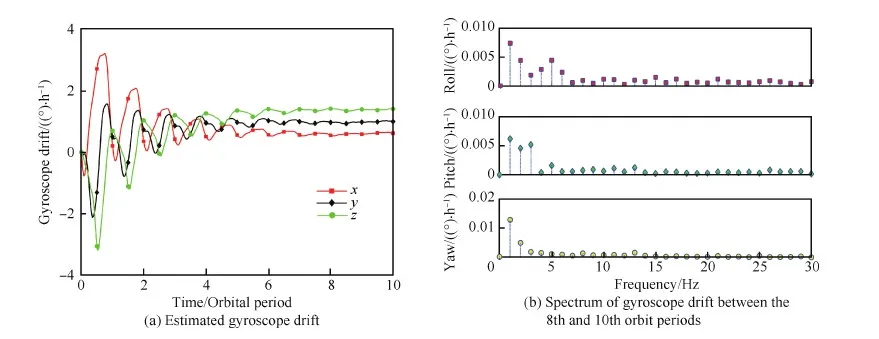
图8 同时估计陀螺漂移和低频误差参数时的陀螺漂移估计结果 Fig.8 Gyroscope drift estimation results when gyroscope drift and LFE parameters are estimated simultaneously
表1 同时估计陀螺漂移与低频误差时的校正结果Table 1 Calibration results when gyroscope drift and LFE are estimated simultaneously
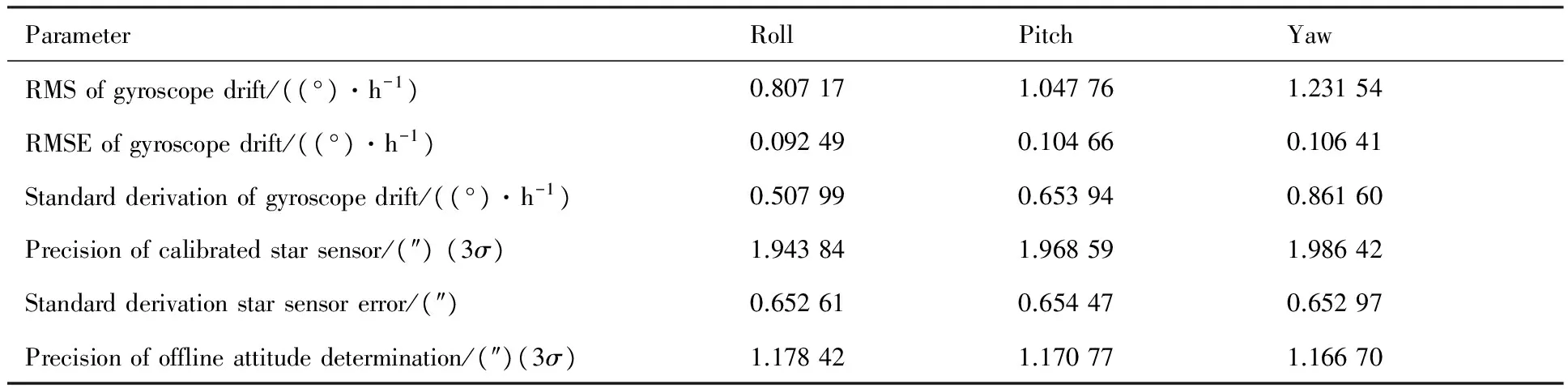
ParameterRollPitchYawRMSofgyroscopedrift/((°)·h-1)0.807171.047761.23154RMSEofgyroscopedrift/((°)·h-1)0.092490.104660.10641Standardderivationofgyroscopedrift/((°)·h-1)0.507990.653940.86160Precisionofcalibratedstarsensor/(″)(3σ)1.943841.968591.98642Standardderivationstarsensorerror/(″)0.652610.654470.65297Precisionofofflineattitudedetermination/(″)(3σ)1.178421.170771.16670
Notes: RMS——Root Mean Square; RMSE——Root Mean Square Error.
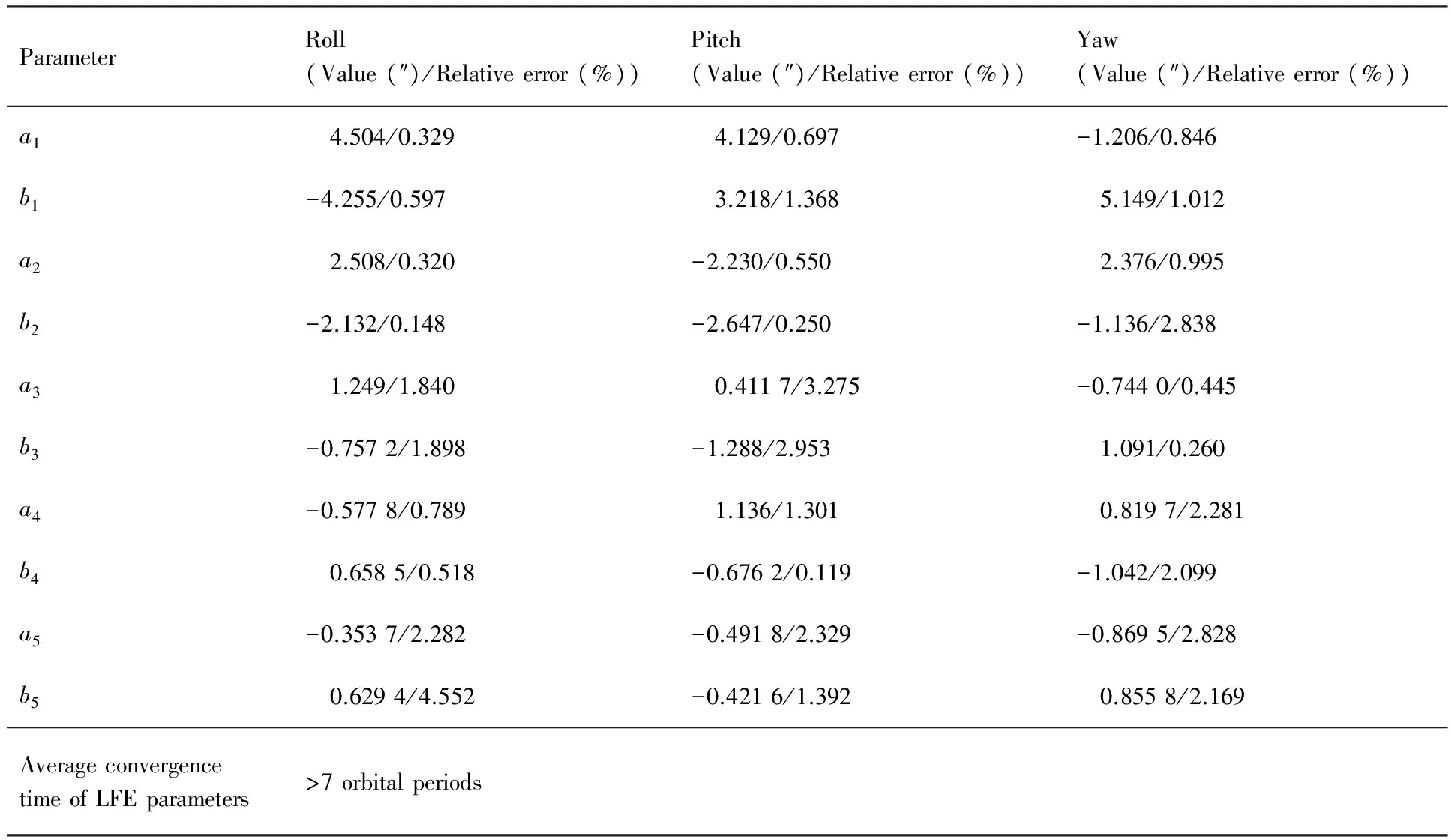
表2 陀螺漂移与低频误差同时估计时低频误差参数的估计结果Table 2 LFE parameter estimation results when gyroscope drift and LFE are estimated simultaneously
如表1所示,原有估计方法得到的陀螺漂移均方根误差(RMSE)的量级约为0.1 (°)/h,星敏校正精度约为2″,综合处理精度在1.17″左右,由表2可知,参数收敛时间超过7个轨道周期,且参数估计不稳定,部分低阶误差参数估计出现了较大偏差。针对上述情况,应用本文第2节提出的离线处理算法,进行仿真验证,图9和图10为仿真结果。
如图9所示,第1次循环处理中,经过反复平滑,三轴陀螺漂移误差均方差明显降低,但由于低频误差影响,明显可观察其存在周期性误差。由图9(b)和图9(c)可知,低频误差存在于陀螺漂移估计与校正后的星敏感器数据中。
如图10所示,经过3次循环,陀螺漂移已去除趋势项,通过分析其频谱也可以看出陀螺漂移与星敏数据低频误差影响基本被校正。
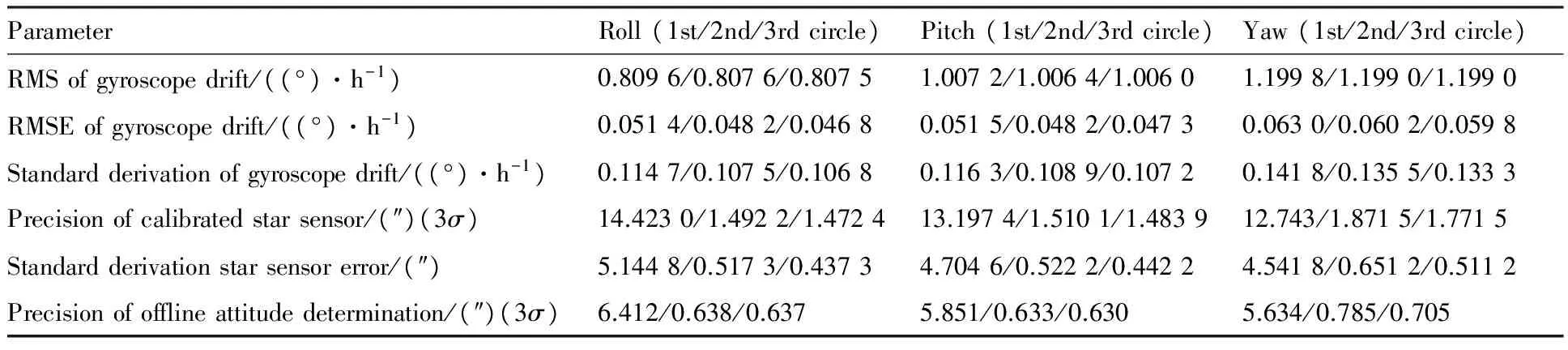
表3和表4给出了图9和图10所示结果的具体数值结果,表3所示为本文所提基于双向滤波的两步法的具体仿真结果,对循环过程中的每一次的陀螺漂移、星敏感器校正及姿态确定精度及残差的离散程度进行了评估,表4为运用该算法得到的低频误差参数值的最终仿真结果。仿真过程中,陀螺漂移估计平滑次数设定为3,低频参数平滑次数设定为1,整体循环估计次数在第3次循环满足条件。
由表3所示,经过3次校正后,陀螺漂移估计标准差与星敏感器校正残差标准差明显降低,分别由[0.114 7 0.116 3 0.141 8] (°)/h和[5.144 8 4.704 6 4.541 8] (″)降低至[0.106 8 0.107 2 0.133 3] (°)/h和[0.437 30.442 2 0.511 2] (″),表明经过算法处理,二者估计误差的离散程度有了明显降低,同时经过算法处理,星敏感器输出姿态精度由[14.423 0 13.197 4 12.743 5] (″)(3σ)提升至 [1.472 4
1.483 9 1.771 5] (″)(3σ),即量级由10″提升至1″,在以上处理结果的基础上,三轴事后处理精度由[6.412 5.851 5.634](″)(3σ)提升至[0.637 0.630 0.705] (″)(3σ),其精度得到了大幅度的提升,证明了本文所提出的基于双向滤波的两步法校正是有效的。同时,对比表4与表2,可以看出,傅里叶参数估计精度有一定提升,尤其对于幅值较大的低阶低频分量估计精准度有较大提升,这也是星敏感器校正精度提高的重要原因,同时参数收敛周期也由7轨以上减少至2~4轨,证明了本文基于MLE的双向自适应滤波算法的有效性。
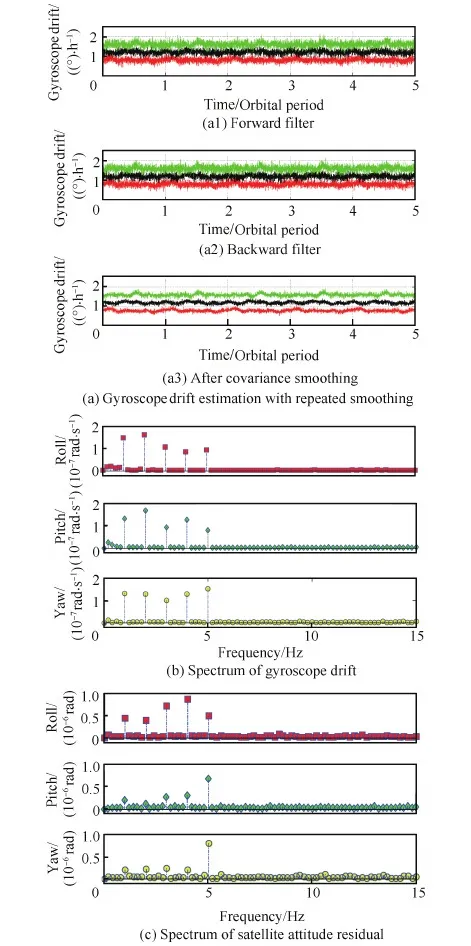
图9 第1次循环校正结果 Fig.9 Calibration results after the 1st circle
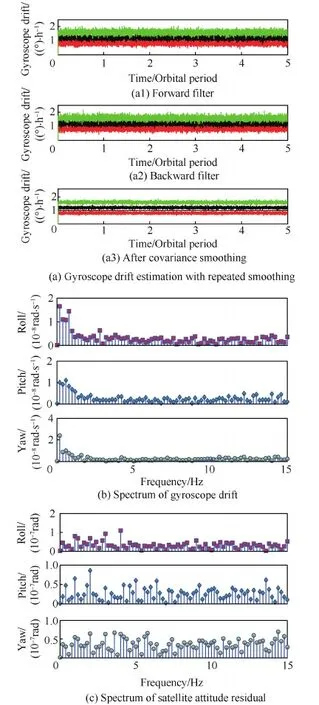
图10 第3次循环校正结果 Fig.10 Calibration results after the 3rd circle
表3 基于反复滤波的两步法校正结果Table 3 Calibration results of two-step repeated filtering algorithm
ParameterRoll(1st/2nd/3rdcircle)Pitch(1st/2nd/3rdcircle)Yaw(1st/2nd/3rdcircle)RMSofgyroscopedrift/((°)·h-1)0.8096/0.8076/0.80751.0072/1.0064/1.00601.1998/1.1990/1.1990RMSEofgyroscopedrift/((°)·h-1)0.0514/0.0482/0.04680.0515/0.0482/0.04730.0630/0.0602/0.0598Standardderivationofgyroscopedrift/((°)·h-1)0.1147/0.1075/0.10680.1163/0.1089/0.10720.1418/0.1355/0.1333Precisionofcalibratedstarsensor/(″)(3σ)14.4230/1.4922/1.472413.1974/1.5101/1.483912.743/1.8715/1.7715Standardderivationstarsensorerror/(″)5.1448/0.5173/0.43734.7046/0.5222/0.44224.5418/0.6512/0.5112Precisionofofflineattitudedetermination/(″)(3σ)6.412/0.638/0.6375.851/0.633/0.6305.634/0.785/0.705
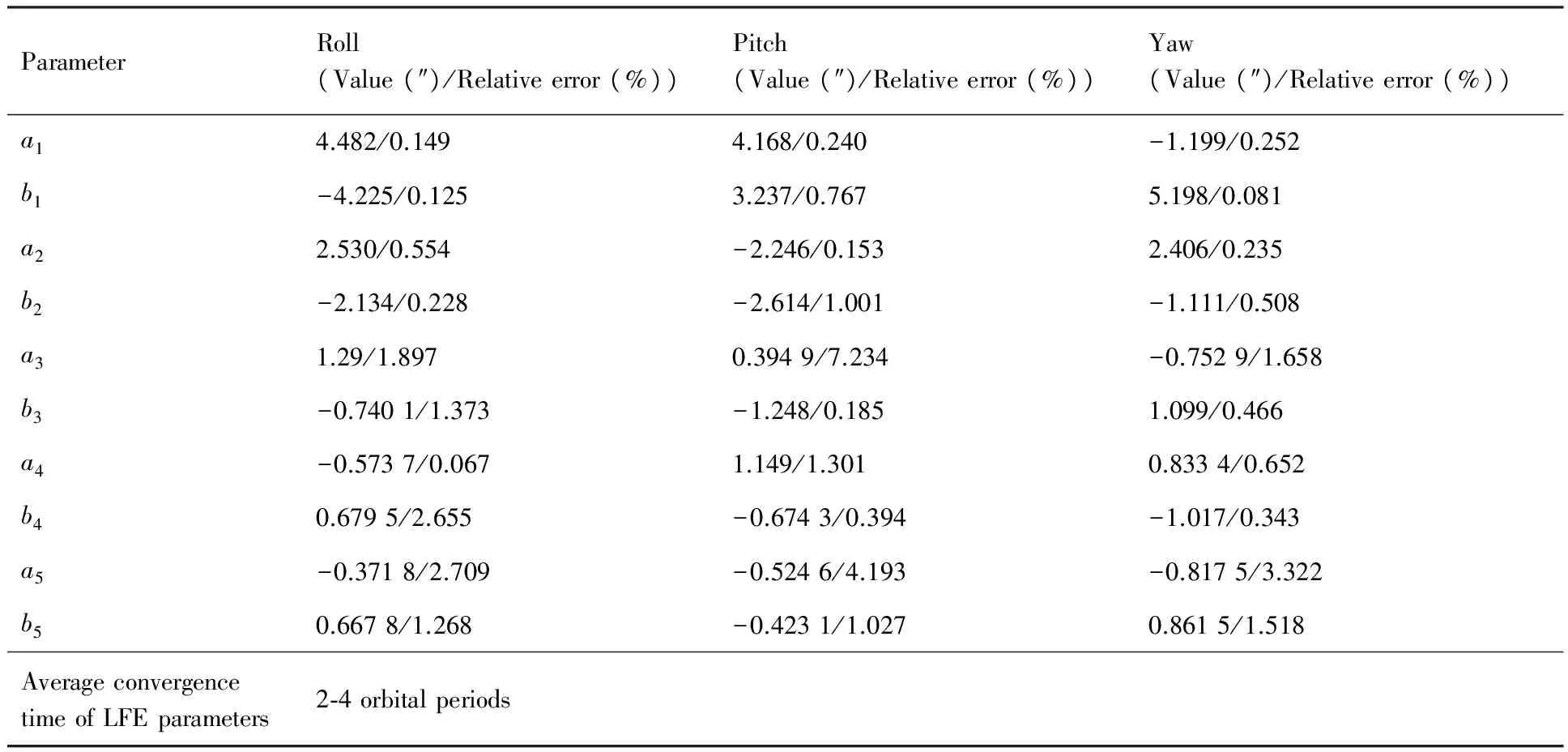
表4 基于反复滤波的两步法低频误差参数估计结果Table 4 LFE parameter estimation results of two-step repeated filtering algorithm
5 结 论
1) 针对低频误差与陀螺漂移的耦合影响进行数学分析,得到结论:无论将低频误差与陀螺漂移一同估计或分开估计,误差估计过程中都会产生相互影响,但针对二者误差特性不同,分开估计能够获得更优的估计效果。
2) 在上述结论的基础上,提出一种基于双向滤波的两步离线校正算法,通过反复平滑获得精准陀螺漂移估计,通过基于MLE的双向自适应滤波算法获得收敛精度较高的低频参数估计,仿真表明,所提出的算法能有效剥离星敏感器低频误差与陀螺漂移间的耦合影响,提高离线姿态确定精度。
[1] IWATA T. Advanced land observing satellite (ALOS): On-orbit status and platform calibration[C]//Geoscience and Remote Sensing Symposium. Piscataway, NJ: IEEE Press, 2007.
[2] IWATA T, ISHIDA H, OSAWA Y. Advanced land observing satellite (ALOS): Enabling technologies and platform performance[C]//Proceedings of SPIE 71060, Sensors, Systems, and Next-generation Satellites XII. Bellingham, WA: SPIE, 2008.
[3] IWATA T, UO M, KAWAHARA T. Ground-based precision attitude determination using repeated smoothing with sequential rate bias and attitude estimation[C]//AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010: 8451.
[4] IWATA T. Precision attitude and position determination for the advanced land observing satellite (ALOS)[C]//Proceedings of SPIE—The International Society for Optical Engineering. Bellingham, WA: SPIE, 2005: 5659.
[5] IWATA T, HOSHINO H, YOSHIZAWA T, et al. Precision attitude determination for the advanced land observing satellite (ALOS): Design, verification, and on-orbit calibration[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Reston: AIAA, 2007.
[6] LEI X, YANG J. Application of RTS optimal smoothing algorithm in satellite attitude determination[C]//International Conference on Intelligent Control and Information Processing. Piscataway, NJ: IEEE Press, 2011: 978-982.
[7] YANG J, LEI X. Satellite attitude determination in post-processing based on URTS optimal smoother[C]//2012 12th International Conference on Control, Automation and Systems (ICCAS). Piscataway, NJ: IEEE Press, 2012: 267-272.
[8] SARKKA S. Unscented Rauch-Tung-Striebel smoother[J]. IEEE Transactions on Automatic Control, 2008, 53(3): 845-849.
[9] 卢欣, 武延鹏, 钟红军, 等. 星敏感器低频误差分析[J]. 空间控制技术与应用, 2014, 40(2): 1-7.
LU X, WU Y P, ZHONG H J, et al. Low frequency error analysis of star sensor[J]. Aerospace Control and Application, 2014, 40(2): 1-7 (in Chinese).
[10] 熊凯, 宗红, 汤亮. 星敏感器低频误差在轨校准方法研究[J]. 空间控制技术与应用, 2014, 40(3): 8-13.
XIONG K, ZONG H, TANG L. On star sensor low frequency error in-orbit calibration method[J]. Aerospace Control and Application, 2014, 40(3): 8-13 (in Chinese).
[11] XIONG K, ZONG H. Performance evaluation of star sensor low frequency error calibration[J]. Acta Astronautica, 2014, 98: 24-36.
[12] 熊凯, 汤亮, 刘一武. 基于地标信息的星敏感器低频误差标定方法[J]. 空间控制技术与应用, 2012, 38(3): 11-15.
XIONG K, TANG L, LIU Y W. Calibration of star sensor’s low frequency error based on landmark information[J]. Aerospace Control and Application, 2012, 38(3): 11-15 (in Chinese).
[13] SCHMIDT U, ELSTNER C, MICHEL K. ASTRO 15 star tracker flight experience and further improvements towards the ASTRO APS star tracker[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Reston: AIAA, 2008.
[14] LAI Y W, LIU J H, DING Y H, et al. Precession-nutation correction for star tracker attitude measurement of STECE satellite[J]. Chinese Journal of Aeronautics, 2014, 27(1): 117-123.
[15] LAI Y W, LIU J H, DING Y H, et al. In-flight quality evaluation of attitude measurements from STECE APS -01 star tracker[J]. Acta Astronautica, 2014, 102: 207-216.
[16] 赖育网, 谷德峰, 刘俊宏, 等. 星敏感器/陀螺在轨系统误差分析与校准[C]//第三届高分辨率对地观测学术年会分会论文集. 北京: 中国学术期刊电子出版社, 2014.
LAI Y W, GU D F, LIU J H, et al. In-flight systematic error analysis and calibration for star tracker/gyro[C]//3th China High Resolution Earth Observation Conference. Beijing: China Academic Journal Electronic Publishing House, 2014 (in Chinese).
[17] 王晓东. 大视场高精度星敏感器技术研究[D]. 长春: 中国科学院研究生院, 长春光学精密机械与物理研究所, 2003: 15-50.
WANG X D. Study on wild-field-of-view and high-accuracy star sensor technologies[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Graduate University of Chinese Academy of Science, 2003: 15-50 (in Chinese).
[18] ROGERS G D, SCHWINGER M R, KAIDY J T, et al. Autonomous star tracker performance[J]. Acta Astronautica, 2009, 65(1-2): 61-74.
[19] WANG J Q, XIONG K, ZHOU H Y. Low-frequency periodic error identification and compensation for star tracker attitude measurement[J]. Chinese Journal of Aeronautics, 2012, 25(4): 615-621.
[20] MOHAMED A H. Optimizing the estimation procedure in INS/GPS integration for kinematic applications[D]. Calgary: University of Calgary, 1999: 62-65.
(责任编辑: 张玉, 徐晓)
URL:www.cnki.net/kcms/detail/11.1929.V.20160801.1037.006.html
Offlinecalibrationmethodoflowfrequencyerrorofstarsensorandgyroscopedrift
ZHAOLin,XIERuida*,LIUYuan,HAOYong
SchoolofAutomation,HarbinEngineeringUniversity,Harbin150001,China
High-accuracypostattitudedataiscriticaltotheimprovementofimagequalityofremotesensingplatforms.Duringofflineprocessing,errorsofattitudesensorscanbeefficientlycalibratedtoachievehigherprecisionofattitudedetermination.However,couplinginfluenceoflowfrequencyerror(LFE)andgyroscopedriftcancausethedecreaseofcalibrationprecision.Inordertosolvetheproblem,amathematicalmodeloftheinfluenceisderivedinthispaper.Meanwhile,atwo-stepbidirectionalsmoothingalgorithmisproposedtocalibratedseparatelygyroscopedriftandLFE.GyroscopedriftandLFEcanbeperfectlyseparatedwiththeproposedmethod.InordertosolvetheproblemsofslowconvergenceofLFEparametersandthedifficultyoftuningnoiseparametersamaximum-likelihood-estimation(MLE)basedbidirectionaladaptivefilteringalgorithmisdeveloped,whichcanimprovebothconvergencespeedandprecisiondramatically.Underthesimulationconditioninthispaper,theaccuracyofofflineattitudedeterminationreaches0.8″(3σ)andtheconvergencetimeofLFEparametersisnotmorethan4orbitalperiods.
starsensor;lowfrequencynoise;gyroscopedrift;satelliteattitudemeasurement;post-processing;errorcalibrationofattitudesensor
2016-06-22;Revised2016-07-11;Accepted2016-07-18;Publishedonline2016-08-011037
s:NationalNaturalScienceFoundationofChina(61273081);HeilongjiangPostdoctoralScientificResearchDevelopmentFund(LBH-Q14054);theFundamentalResearchFundsfortheCentralUniversities(HEUCFD1503)
.E-mailxieruida_paper@163.com
2016-06-22;退修日期2016-07-11;录用日期2016-07-18; < class="emphasis_bold">网络出版时间
时间:2016-08-011037
www.cnki.net/kcms/detail/11.1929.V.20160801.1037.006.html
国家自然科学基金 (61273081); 黑龙江省博士后科研启动金 (LBH-Q14054); 中央高校基本科研业务费专项资金 (HEUCFD1503)
.E-mailxieruida_paper@163.com
赵琳, 谢睿达, 刘源, 等. 星敏感器低频误差与陀螺漂移离线校正方法J. 航空学报,2017,38(5):320552.ZHAOL,XIERD,LIUY,etal.OfflinecalibrationmethodoflowfrequencyerrorofstarsensorandgyroscopedriftJ.ActaAeronauticaetAstronauticaSinica,2017,38(5):320552.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2016.0218
V448.2
A
1000-6893(2017)05-320552-14