预置舵角下超空泡航行体运动过程弹道特性研究
2017-11-09时素果王亚东刘乐华杨晓光
时素果, 王亚东, 刘乐华, 杨晓光
(北京机电工程研究所, 北京 100074)
预置舵角下超空泡航行体运动过程弹道特性研究
时素果, 王亚东, 刘乐华, 杨晓光
(北京机电工程研究所, 北京 100074)
为研究超空泡航行体在水平面机动转弯过程中的弹道特性,采用航行体头部设置预置舵角方法实现,开展了0°、3°和6°预置舵角下航行体自由运动的试验研究。试验在水池中进行,采用高速摄影观察不同预置舵角下的空泡演化过程,采用内测装置测量航行体运动参数,获得了不同预置舵角下超空泡航行体水平运动过程中的弹道特性。试验结果表明:当预置舵角为0°时,航行体侧向力由于非定常因素扰动小幅波动,但均值基本为0;当存在预置舵角时,随着预置舵角的增大,轴向力和侧向力不断增加;预置舵角可以控制超空泡航行体的弹道水平机动转弯,且预置舵角越大、弹道越容易转弯,但舵角过大会导致航行体弹道失稳。
流体力学; 超空泡航行体; 预置舵角; 机动转弯; 弹道; 试验研究
0 引言
航行体超空泡技术是指在空化器和人工通气的共同作用下,形成一个包裹自身的大型气泡,以此来大幅度降低摩擦阻力,从而使得水下航行体获得90%的减阻量[1]。借此,水下航行体的速度可提高到100 m/s以上[2-3],这种减阻水平将对水下武器的研制产生巨大的影响。但由于超空泡航行体流场的特殊性与复杂性,使得该技术在实际应用中面临诸多挑战,其中在超空泡状态下航行体能否机动或者机动过程中弹道是否稳定成为目前研究的热点,国内外很多学者对此开展了大量的研究。
近年来,国外学者Kirschner等[4]和Vasin[5]基于势流理论预测空泡形态,简化系列数学模型,构建了最基本的超空泡航行体动力学模型。Kulkarni等[6]和Kirschner等[7]基于单自由度研究了无控条件下超空泡射弹的运动过程,获得了其动力学行为,掌握了航行体水平航行的一些典型特征参数变化规律。Geol等[8]采用空泡膨胀独立性原理的方法,在考虑空泡记忆效应的基础上,获得了超空泡航行体尾部滑行的非线性力,建立了超空泡航行体非线性动力学模型。Vanek等[9]研究了超空泡航行体6自由度运动,在小扰动线性化的基础上分析了运动稳定性,发现纵向和横向在无控条件下运动均处于稳定状态。国内学者对超空泡状态下的弹道特性也进行了大量研究,蒋运华等[10]采用理论和数值模拟相结合的方法,考虑航行体与空泡之间的相互关系,建立了水动力计算方法和动力学方程,获得了巡航段水平面弹道特性。文献[11-13]基于流场数值模拟方法和运动学方程,建立了超空泡航行体动力学仿真模型,获得了超空泡航行体巡航状态下纵平面内的动力学行为,发现超空泡航行体在无控条件下仍具有一定的稳定性。曹伟等[14-15]建立了自然超空泡航行体在纵平面内简化的运动方程,编制了相应的弹道程序,并对其在100 m/s左右速度区段内的典型弹道特性进行了分析,实现了定深直航、变航向、变深度等典型弹道机动。冯光等[16]应用细长体理论获得了超空泡航行体的流体动力,进行了动力学建模,仿真并获得了超空泡航行体的运动弹道。从上述研究成果可以看出研究超空泡状态下弹道特性的必要性,但在弹道特性研究中,空泡形态和流体动力主要采用经典的势流理论经验公式或者数值模拟方法获得,建立的动力学模型也进行了大量简化处理,未经试验验证,因此迫切需要采用试验研究这种最能真实反映物理流动过程的方法开展研究。
本文主要通过建立的一套水下高速航行试验装置,通过试验研究的方法开展预置舵角下水下航行体高速自由航行试验,通过高速录像观察航行体水下高速航行过程的空泡演化规律,通过内测装置测量了航行体运动参数,在上述数据的基础上分析了超空泡航行体机动过程弹道特性。
1 试验装置与方法
超空泡航行体水下高速航行过程试验示意图见图1. 开展试验时,将试验模型安装在发射管内,通过发射架将发射管安放在水下要求的深度,发射炮以不同的压力发射,使试验模型产生不同的水下航行速度,用高速摄像系统记录入水过程空泡流场演化过程,用内测装置测量试验模型的运动姿态;航行体在水下高速运动一段时间后,在空泡未能包裹航行体现象出现之前,将被回收防护装置一并回收。

图1 超空泡航行体自由航行过程试验示意图Fig.1 Schematic diagram of free motion experiment of supercavitating vehicle
其中,试验水池长70 m、宽44 m、深10 m;试验模型在水下高速航行后,为避免在试验过程中对水池底部或壁面造成破坏,采用悬挂钢板方式对模型实施拦截;发射装置包含发射炮、发射架和高压气体压缩机3部分,加速炮管(内径100 mm,长6 000 mm)管口设置有隔水薄膜,其工作原理为:将一定量的氮气注入有限体积的炮腔内,调节阀门并通过气压表标定气压强度,使试验模型在恒定气压的持续作用下经加速炮管加速到一定速度后射入水池。
测量运动参数时,选取以发射点为零点的地面坐标系OXYZ,以及建立原点位于航行体质心的弹体坐标系oxyz来描述超空泡航行体运动,起始运动时刻,地面坐标系和弹体坐标系零点重合。
6自由度运动系统采用模块化设计,3个通道的加速度计通过延长线与主板连接,加速度计模块采用单面电路板设计,用两个螺钉刚性连接在内测支架上,以有效避免主电路板自身振动带来的影响。内测装置主要技术指标为:轴加速度计,量程:70g;轴角速率陀螺,量程:2 000°/s;采样精度:16位;采样率:3 kHz(6通道同步);容量:128 KB,最大采样率时可存储约3.5 s数据。
高速摄像系统采用美国REDLAKE公司HG-100K型号、机载内存为4 GB的高速摄像机,以1 000帧/s的速度对整个入水过程进行记录。
为了实现航行体头部向空泡内通气的功能,选择碳纤维气瓶(尺寸为φ62 mm×300 mm,额定压力为30 MPa,容积为0.5L)置于模型内部。试验前瓶内充入一定压力(p≤10 MPa)的气体后保持密封状态装入试验模型,航行体开始运动时刻用重块撞击惯性阀打开通气管路,高压气体从航行体前端通气孔流入空泡内。
2 试验模型
设计一个符合超空泡流型的试验模型开展水下高速航行试验,模型重量为7.6 kg,长800 mm,最大直径100 mm,试验模型前端面直径35.2 mm,具体外形如图2所示。

图2 试验模型实物和尺寸图Fig.2 Physical photograph and size of experimental model
主要无量纲参数轴向力系数Cx、侧向力系数Cz分别定义如下:

(1)

(2)
式中:Fx和Fz分别为航行体所受到的轴向力和侧向力;u为超空泡航行体运动过程不断变化的速度;Ac为圆柱段面积;ρl为水的密度。
3 试验结果分析
为了探索超空泡航行体机动转弯过程的弹道特性,采用航行体头部设置预置舵角的方法,开展不同预置舵角下航行体水下高速自由航行试验研究,其中预置舵角分别设计为0°、3°和6°,速度为60 m/s,通气压力为4 MPa.
为了分析不同预置舵角下超空泡航行体运动过程的弹道特性,图3和图4分别给出了3种预置舵角下航行体运动过程中的受力与弹道特性曲线。

图3 不同预置舵角下超空泡航行体 运动过程的受力曲线Fig.3 Force curves of supercavitating vehicle free motion at different preset rudder angles

图4 不同预置舵角的运动参数曲线Fig.4 Motion parameters curves at different preset rudder angles
针对超空泡航行体自由航行过程的受力,从图3可知,轴向力在一定值附近小幅波动,随着预置舵角的增大,在出筒的瞬间,由于尾气的影响使轴向力变化规律不明显,不再分析。随着时间的推移,轴向力的绝对值随着预置舵角的增大而增大,这是因为随着舵角的增大,空泡不再对称,沾湿面积增大。这一现象与俄罗斯经典理论公式超空泡航行体轴向力随着空化器舵角的增大而增大的结论一致。对于侧向力,当预置舵角为0°时,航行体侧向力由于非定常因素的扰动而小幅波动,但均值基本为0,随着预置舵角的增加,侧向力不断增加。
表1 3种预置舵角下空泡流场演化过程
Tab.1 Evolutionary processes of cavity at three preset rudder angles
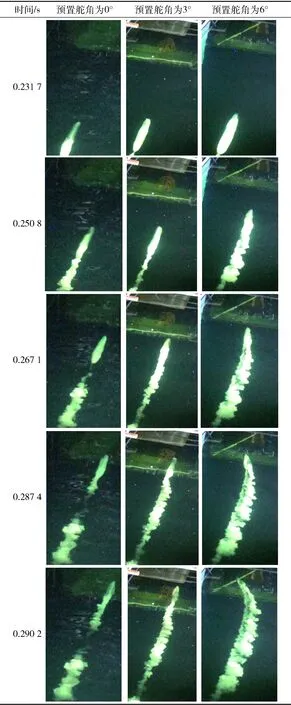
图4分别给出了不同预置舵角下的运动参数曲线,结合受力图可知,当预置舵角为0°时,航行体未受到侧向力,即不存在偏航力矩,水下航行体以直航高速运动,水平面弹道曲线基本为一条直线,弹道并未发生弯曲,偏航方向的位移基本上为0 m. 当有预置舵角时,超空泡航行体高速运动,航行体在侧向力的作用下对质心形成偏航力矩,使航行体的弹道以一定的点为圆心转弯,迫使航行体弹道产生偏转。预置舵角越大,受到的侧向力和力矩越大,转动半径越小。
为了详细分析产生上述现象的原因,表1给出了3种预置舵角下航行体运动过程中典型时刻空泡形态图。结合图3、图4和表1可知,在超空泡航行体水下高速运动过程中,空泡形态并非一种固定形态,而是随着超空泡航行体的运动而变化。当预置舵角为0°时,由于非定常因素扰动的影响,超空泡航行体尾部左右轻微拍动空泡壁,但仍处于运动平衡状态,运动轨迹基本为一条直线,具体见运动参数曲线。针对本次实验,当有预置舵角时,超空泡航行体受到向左方向的侧向力,导致航行体向左转弯,与常规航行体的转弯不同。在向左转弯的过程中超空泡航行体尾部右侧拍击空泡壁,局部沾湿,产生恢复力和力矩,随着拍击运动的增强,沾湿面积增大,尾部力和力矩增大,使尾部向泡内运动,使得航行体的转弯过程趋势减小,偏航角度减小,预置舵角产生的力和力矩再次大于尾部受到的力和力矩,进一步向左转弯,使弹道逐渐完成偏转运动,此过程可通过空泡形态演变过程及偏航角曲线等可知。
随着预置舵角的增大,弹道曲线的回转半径减小,弹道更容易转弯。但预置舵角也不能太大,如在进行6°舵角试验过程中,超空泡航行体转弯过程没有出现明显得拍击现象,这是因为舵角过大,其产生的偏转力矩致使试验模型迅速出现转弯,而此过程中尾部拍击产生的恢复力相对为一小值,最终导致弹道失稳,故实际应用过程中舵角应小于此值。因此,最大预置舵角值应基于航行体外形和空泡流型的不同而定。
4 结论
本文对不同预置舵角下超空泡航行体自由航行过程进行了试验研究,分析了不同预置舵角下超空泡航行体运动过程的弹道特性,得出以下结论:
1)通过预置舵角可以控制弹道机动转弯,且预置舵角越大、弹道越容易转弯、机动半径越小,但预置舵角过大,会导致航行体弹道失稳;
2)当预置舵角为0 ℃时,航行体侧向力由于非定常因素的扰动而小幅波动,但均值基本为0,当存在预置舵角时,随着预置舵角的增加,轴向力和侧向力将不断增加。
References)
[1] 傅慧萍.回转体超空泡流减阻特性及稳定性研究[D].上海:上海交通大学,2003.
FU Hui-ping. Research on drag reduction characteristics and motion stability of supercavitating axisymmetric body[D]. Shanghai: Shanghai Jiao Tong University,2003.(in Chinese)
[2] 傅金祝.超空泡水中兵器[J].水雷战与舰船防护,1998(2):2-4.
FU Jin-zhu. Underwater supecavitating bodies [J]. Mine and Warship Protection,1998(2):2-4.(in Chinese)
[3] 陈兢.新概念武器- 超空泡水下高速武器[J].飞航导弹,2004(10):34-37.
CHEN Jing.New-concept weapons - the underwater supercavitating high-speed vehicle [J]. Aerodynamic Missile Journal,2004(10):34-37.(in Chinese)
[4] Kirschner I N, Uhlman J S. Overview of high-speed supercavitating vehicle control[C]∥Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, CO, US: American Institute of Aeronautics and Astronautics Inc.,2006:3100-3116.
[5] Vasin A D. The principle of independence of the cavity sections expansion (Logvinovich’s principle) as the basis for investigation on cavitation flows[R]. Brussel,Belgium: von Karman Institute for Fluid Dynamics,2001.
[6] Kulkarni S,Pratap R.Studies on dynamics of a supercavitating projectile[J].Applied Mathematical Modeling,2000,24(2):113-129.
[7] Kirschner I N,Rosenthal B J,Uhlman J S.Simplified dynamical systems analysis of supercavitating high-speed bodies[C]∥5th International Symposium on Cavitation. Osaka,Japan: MARIN,2003.
[8] Geol A. Robust control of supercavitating vehicles in the presence of dynamic and uncertain cavity[D].FL,US: University of Florida,2005.
[9] Vanek B,Bokor J,Balas G J,et al. Longitudinal motion control of a high-speed supercavitation vehicle[J]. Journal of Vibration and Control, 2007,13(2):159-184.
[10] 蒋运华.水中超空泡流及航行体弹道特性研究[D]. 哈尔滨:哈尔滨工程大学,2012.
JIANG Yun-hua. The investigation of the supercavitation flows underwater and the trajectory characteristics of the vehicles[D].Harbin:Journal of Harbin Engineering University,2012. (in Chinese)
[11] 于开平,张广,邹望,等.超空泡航行体纵向平面动力学行为的CFD分析[J].船舶力学,2014,18(4):370-376.
YU Kai-ping, ZHANG Guang, ZOU Wang, et al. CFD analysis of the dynamic behavior of supercavitating vehicle in the longitudinal plane[J]. Journal of Ship Mechanics,2014,18(4):370-376.(in Chinese)
[12] 王京华,魏英杰,于开平,等.基于空泡记忆效应的水下超空泡航行体建模与控制[J].振动与冲击,2010,29(8):160-163.
WANG Jing-hua, WEI Ying-jie, YU Kai-ping, et al. Modeling and control of underwater supercavitating vehicle based on memory effect of cavity[J]. Journal of Vibration and Shock, 2010,29(8):160-163.(in Chinese)
[13] 赵成功,王聪,孙铁志,等.初始扰动对射弹尾拍运动及弹道特性影响分析[J].哈尔滨工业大学学报,2016,48(10):71-76.
ZHAO Cheng-gong, WANG Cong, SUN Tie-zhi, et al. Analysis of tail-slapping and ballistic characteristics of supercavitating projectiles under different initial disturbances[J].Journal of Harbin Institute of Technology, 2016,48(10):71-76.(in Chinese)
[14] 曹伟,魏英杰,韩万金,等.超空泡航行体典型弹道特性仿真研究[J].哈尔滨工程大学学报,2010,31(3):323-328.
CAO Wei, WEI Ying-jie, HAN Wan-jin, et al. Simulating the trajectory of supercavitating vehicles[J].Journal of Harbin Engineering University,2010,31(3):323-328.(in Chinese)
[15] 曹伟,魏英杰,韩万金,等.自然超空泡航行体弹道稳定性分析[J].哈尔滨工业大学学报,2012,44(1):26-30.
CAO Wei,WEI Ying-jie,HAN Wan-jin,et al. Simulation of the trajectory stability of natural supercavitating vehicles[J]. Juornal of Harbin Institute of Technology,2012,44(1):26-30.(in Chinese)
[16] 冯光,颜开.超空泡航行体水下弹道的数值计算[J].船舶力学,2005,9(2):1-8.
FENG Guang, YAN Kan. Numerical calculation of underwater trajectory of supercavitating bodies[J]. Journal of Ship Mechanics,2005,9(2):1-8.(in Chinese)
ResearchontheTrajectoryCharacteristicsofSupercavitatingVehicleatPresetRudderAngle
SHI Su-guo, WANG Ya-dong, LIU Le-hua, YANG Xiao-guang
(Beijing Electro-Mechanical Engineering Institute,Beijing 100074,China)
The turning maneuver trajectory characteristics of the supercavitating vehicle on the horizontal plane are realized by presetting the rudder angles in the head of supercavitating vehicle, and the free motion of vehicle at the preset rudder angles of 0°, 3°and 6° is investigated in experiment. The experiment is done in a pool. The eveluationary process of cavity is observed by using a high-speed video camera, the motion parameters of vehicle are measured using a built-in measuring device,and the turning maneuver trajectory characteristics of supercavitating vehicle on the horizontal plane at different preset rudder angles are acquired. The experimental results show that the side force of vehicle shows a small fluctuation due to the perturbation of the unsteady factors when the preset rudder angle is 0°, but the average value is basically 0. When the preset rudder angle exists, the axial and side forces increase with the increase in the preset rudder angle. The preset rudder angle can be used to control the horizontal turning maneuver of supercavitating vehicle. The larger the preset rudder angle is, the easier the turning maneuver is, but an overlarge preset rudder angle may cause the trajectory destabilization.
fluid mechanics; supercavitating vehicle; preset rudder angle; turning maneuver; trajectory; experimental study
2017-03-03
国家自然科学基金项目(11602260)
时素果(1982—), 女, 工程师。 E-mail: shisuguo@126.com
TJ630.1
A
1000-1093(2017)10-1974-06
10.3969/j.issn.1000-1093.2017.10.013
