车路协同环境下信号交叉口车速引导策略
2017-11-04贾丰源李中兵陈庆东马小陆曾庆喜
贾丰源, 李中兵,陈庆东,马小陆,曾庆喜
(1.奇瑞汽车股份有限公司,安徽芜湖 241000;2. 安徽工业大学电气与信息工程学院,安徽马鞍山 243002; 3.南京航空航天大学无人驾驶车辆研究中心,江苏南京 210016)
1008-1542(2017)05-0432-06
10.7535/hbkd.2017yx05004
车路协同环境下信号交叉口车速引导策略
贾丰源1, 李中兵1,陈庆东1,马小陆2,曾庆喜3
(1.奇瑞汽车股份有限公司,安徽芜湖 241000;2. 安徽工业大学电气与信息工程学院,安徽马鞍山 243002; 3.南京航空航天大学无人驾驶车辆研究中心,江苏南京 210016)
为降低车辆需停车通过信号交叉口的可能性,减少停车时间,针对在三、四线城市交叉口区域实时的车辆排队长度数据不易或无法获得这一实际情况,提出车路协同环境下的车速引导策略。搭建了车载交通灯提醒系统,并对安徽省芜湖市衡山路-凤鸣湖北路交叉口的交通灯进行了数据采集。在实际数据的基础上,运用VISSIM软件进行仿真验证,结果表明,在高峰和平峰流量时车速引导策略均能有效降低单车行程时间,平均降低比率分别为9.2 %和13.0 %,且改善效果在平峰流量时优于高峰流量时。该车速引导策略提高了信号交叉口的交通效率,为车路协同环境下车速引导的实际有效运用提供了思路。
无线通信技术;车路协同;交通灯;VISSIM;车速引导;交叉口
自20世纪50年代以来,缓解交通拥堵、降低交通延误一直是研究人员关注的一个话题。近年来,车路协同系统成为智能交通的研究热点,欧美等发达国家都在积极推进相关技术的研究[1]。它是基于无线通信、传感检测技术获取车辆和道路信息,通过车-车、车-路之间的信息交互和共享,实现车辆与道路基础设施之间的智能协作与配合,以达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标[2]。

图1 车速引导示意图Fig.1 Vehicle speed guidance
车路协同环境下信号交叉口车速引导过程如下:首先,交通信号灯的路侧单元向车辆广播信号灯配时信息、当前所处相位以及当前相位剩余时间;再由车载单元通过当前车辆的速度、位置、信号相位剩余时间,计算出对驾驶员提示的建议行驶速度,如图1所示。适用于城市及郊区有信号灯交叉口,有助于驾驶员接近信号灯时调整行驶速度,提高车辆不停车通过交叉口的可能性[3]。
国内外学者提出了多种车路协同环境下的车速引导策略。QING[4]利用车路协同技术实时的交通数据建立了基于车头时距的车队判别算法,并建立了信号控制优化模型用于干道多交叉口之间的协调控制。KANG等[5]介绍了一种基于车路协同的城市交叉口交通控制系统,该系统通过速度引导消除交叉口两难区。ABULEBDEH等[6]分析了动态车速控制的可行性。MALAKORN等[7]考虑在两相位、低流量的条件下,通过改变信号相位,让车辆不停车通过,研究表明在此情况下可降低车辆延误时间和燃料使用。YANG等[8]以城市郊区干道为研究对象,构建了车速引导策略,并利用VISSIM对其进行验证。CHEN等[9]通过路侧可变信息板来进行车速引导,提出了动态车速引导与动态信号控制相结合的信号控制优化方法,用于干道多交叉口之间的协调控制。NEKOUI等[10]通过实地模拟的方式验证了车路协同环境下车速诱导的方式,可有效缓解不同种情况下车辆的紧急避让及防撞问题。FENG等[11]提出了用于信号灯自适应控制的车速引导策略,借助VISSIM软件仿真模拟了在高渗透率和低渗透率车路协同应用场景下延误的减少情况。ZHAO等[12]利用集成PARAMICS与驾驶模拟器的网联汽车平台研究车速引导,结果表明引导后能减少9%的燃油消耗。LI等[13]采用车速引导策略解决了信号交叉口两难区问题。RAKHA等[14]提出了基于车路协同的信号交叉口车速引导策略,用于提升燃油使用率。CAI等[15]提出了无信号控制交叉口的车速引导模型,并借助Q-PARAMICS进行了仿真验证,结果表明较之感应式信号控制方法,该模型能有效降低平均延误及排队长度。WU等[16]和李鹏凯等[17-18]在车路协同环境下以交叉口车辆停车时间最小化为目标,提出面向个体车辆的车速引导机制与模型,并在此基础上以交叉口整体效益最佳为目标,提出多车协同车速引导模型,并进行了仿真验证。张存保等[19]提出车路协同环境下信号控制交叉口两难区问题改善方法的工作流程,综合运用车速引导、动态绿灯时间延长等措施降低车辆进入两难区的概率。梅朝辉等[20-21]提出了车路协同环境下干线交叉口信号协调控制模型,并研究了速度引导模型,利用VISSIM软件仿真验证,结果表明,相比定时控制和MAXBAND协调控制,该方法能较好地减少交叉口延误和停车次数。
大部分车速引导策略都引入了“进口道车辆排队长度”这一参数,然而在实际应用场景开发过程中三、四线城市交叉口区域实时的车辆排队长度数据不易或无法获得。因此,根据这一实际情况,笔者综合考虑信号相位、车辆位置、速度等信息,提出车路协同环境下的车速引导策略,以减少单车停车时间为目标,提高车辆不停车通过信号交叉口的可能性,减少停车等待时间。
1 车载交通灯提醒系统
依据车路协同系统的功能需求,搭建了车载交通灯提醒系统,包括车载交通灯提醒单元和路边单元两部分。车载交通灯提醒单元包括车载计算模块、无线通信模块、高精度定位模块及显示模块,如图2所示。车载计算模块选用了三星公司的Exynos 4412高性能处理器,主频为1.4 GB,基于 Cortex-A9 内核的四核处理器,大幅度降低系统的功耗,可满足算法的实时性要求。无线通信模块通过串口与车载计算模块进行数据通信,选用美国德州仪器公司的ZigBee模块CC2530作为无线收发核心芯片,用于接收来自路侧单元的交通灯状态数据。高精度定位模块采用北斗星通公司生产的北斗天璇C200-AT型号定位产品,具有全天候、高精度、实时连续性等特点[22],经过实际测试,不设基站的情况下,车辆的位置定位精度可达到1.2 m,满足车速引导定位需求。

图2 车载交通信号灯提醒单元实物图Fig.2 Vehicular traffic signal reminder unit
路侧单元包括通信模块和计算模块,选用了与车载单元相同的ZigBee模块作为通信模块,同时也作为计算模块。
2 车速引导策略
假设条件如下:不考虑相邻交叉路口的影响;不考虑行人、非机动车的干扰;不考虑二次停车;不考虑交叉路口其他车道通行状况;不考虑多车相互干扰状况;不考虑车辆的加减速状况;由于在三、四线城市,交叉口路口处的排队长度常常无法获得或不易获得,所以不考虑排队长度对引导车速的影响。设t为驾驶员从接收到路侧单元信息后至驶过停车线所用时间,则有
式中:v0为当前车速,km/h;v为引导车速,取整数,v=1, 2, 3, …,km/h;l为车辆至停车线的距离,m;lv为车辆的车长,m;la为车辆的位置定位精度,m;a为车辆的加速度,m/s2;td为驾驶员看到车速引导信息并开始加减速的延迟时间,参考文献中根据驾驶模拟器得到的试验数据,可取为3 s[19]。
车速引导考虑以下3种情形。
1)车辆在到达交叉路口时,绿灯已经亮起,应使车辆在绿灯结束前通过交叉路口。当车辆预计驶过停车线时间t小于等于绿灯剩余时间tg时,表明车辆可在绿灯时段内通过交叉口,则有优化函数fg:
其约束条件为
式中:vmax为道路限速值,引导车速v应满足道路限速要求,km/h;vmin为驾驶员挂三档时且不加油门或踩刹车时的车速,方便驾驶员控制车速。
2)车辆到达交叉路口时,红灯已经亮起,车辆停车等待,应引导车辆维持速度,减少车辆停车等待时间,并在最短时间通过交叉路口。在无车辆排队时,车辆预计驶过停车线时间大于等于红灯剩余时间tr,表明车辆到达停车线时刻红灯已转为绿灯,则有优化函数fr:
其约束条件为
式中tr为红灯剩余时间,s。
3)车辆到达交叉路口时,红灯已经亮起,在有车辆排队时,车辆可能会逐渐减速直至队尾排队停车等待。为方便工程应用,当前车速v0小于城市交通高峰时段的平均车速v′时,估算排队消散时间t′:


其约束条件为
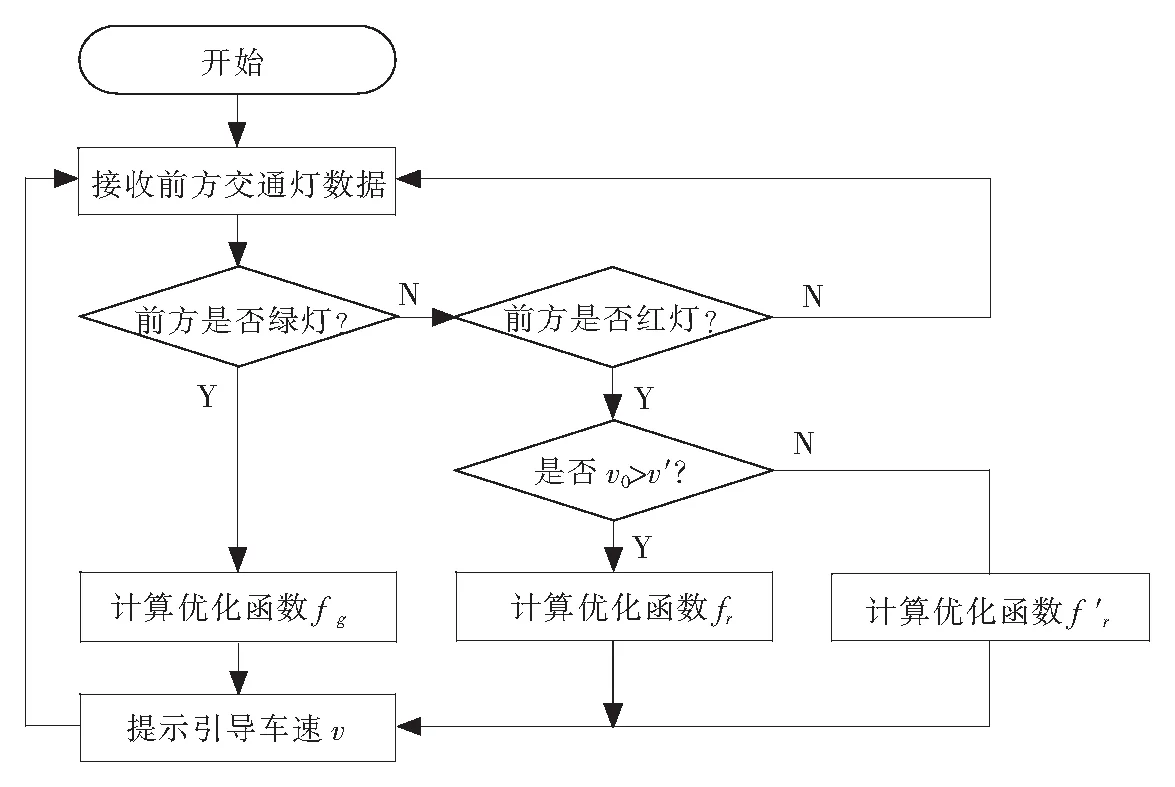
图3 车速引导策略的工作流程Fig.3 Flow chart of the speed guidance strategy
车速引导策略的工作流程如图3所示。求解过程是从当前车速向两侧遍历寻优,当优化函数值为0或遍历自变量取值范围内所有的值后,停止遍历,获得最优解。
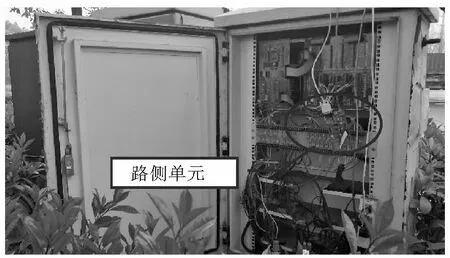
图4 路侧单元实物图Fig.4 Road side unit
3 交通灯数据采集
为验证车速引导策略的可行性,采集了安徽省芜湖市衡山路-凤鸣湖北路交叉路口的交通信号灯数据。通过路侧单元将交通信号灯的数据从位于交叉口的信号机控制柜传输到车载交通信号灯提醒单元,路边单元与信号机控制柜间通过串口进行数据通信,如图4所示。传输数据的内容包括:相位号、红灯剩余时间、绿灯剩余时间、绿闪剩余时间、黄灯剩余时间、全红剩余时间等,消息频率为2 Hz。经过数次实地测试,最远距交叉口停车线150 m处,车载交通灯提醒单元可稳定地接收来自路侧单元的数据。
4 实证分析
4.1 仿真建模
VISSIM是由德国PTV公司开发的微观交通流仿真软件,可作为分析许多交通问题的有力工具。选取衡山路-凤鸣湖北路交叉口进行实证研究,以VISSIM为仿真平台,利用Visual Basic 2013编程软件及VISSIM-COM接口对其进行二次开发,实现车辆车速引导,验证车速引导策略。
衡山路-凤鸣湖北路交叉口共有4个进口,本文重点选取东进口直行右转车道(简称直右)为研究对象,交叉口车道功能划分如表1所示。

表1 衡山路-凤鸣湖北路交叉口各车道功能
东西方向交通信号灯周期为122 s,绿灯时间为32 s,交叉口配时如表2所示。根据交通信号灯数据采集实地测试结果,仿真方案中采取当车辆距离停车线150 m处开始接收车速引导提示,仿真示意图如图5所示。

图5 衡山路-凤鸣湖北路交叉口仿真示意图Fig.5 Intersection of Hengshan Road and North Fengming Lake Road


参数运行方向东西方向南北方向机动车相位左直左 直相位时间/s3232 48周期/s 122
4.2 数据分析
选取衡山路-凤鸣湖北路交叉口的高峰和平峰时段的交通流量数据,分别进行仿真试验,其结果见表3。

表3 仿真试验结果
从表3可以看出,在高峰和平峰流量下,车速引导策略均可降低单车行程时间,平均降低比率分别为9.2%和13.0%。平峰流量下改善效果高于高峰流量,其原因在于,高峰流量下因车辆排队和密集的车流而不能充分发挥车速引导策略的作用,同时高峰流量下因车辆排队导致直行右转车道的右转车辆排队而无法顺利实施右转,致使行程时间较长。
5 结 论
通过以上分析与研究,可以得出如下结论。
1)车速引导改善单车行程时间的效果受交通流量的影响,平峰流量下其改善效果较好,随着交通流量的增加,其改善效果降低。在高峰和平峰流量下均可降低单车行程时间,平均降低比率分别为9.2%和13.0%。
2)高峰时段因右转车辆排队无法顺利实施右转,车速引导改善平均行程时间的效果受到影响。
3)仿真结果表明,提出未引入排队长度参数的车速引导策略可有效降低单车行程时间,提高交通效率,具有较好的实际应用价值。
本文仅对单车进行分析,未考虑车辆的加减速及多车相互干扰状况,交叉路口其他车道通行状况对本交叉路口通行策略制定的影响仍需要进一步研究。
/
[1] 赵志国,王冬冬. 重型车辆侧翻预警技术研究现状及发展趋势[J]. 河北科技大学学报,2013, 34(2):108-112.
ZHAO Zhiguo, WANG Dongdong. Research status and development trend of side tumbling pre-warning technology of heavy vehicle [J]. Journal of Hebei University of Science and Technology, 2013, 34(2):108-112.
[2] 龙文民,褚端峰,施辉,等.车路协同环境下紧急车辆优先通行方法研究[J].中国安全科学学报, 2015, 25(7): 141-146.
LONG Wenmin, CHU Duanfeng, SHI Hui, et al. Algorithm research on traffic priority for emergency vehicles based on cooperative vehicle infrastructure system [J]. China Safety Science Journal, 2015, 25(7): 141-146.
[3] FuTURE-TIAA车联网联合工作组.智能网联汽车基本应用[R].北京:车载信息服务产业应用联盟, 2016: 18.
[4] QING He. Robust-intelligent Traffic Signal Control within a Vehicle-to-Infrastructure and Vehicle-to-Vehicle Communication Environment [D]. Tucson: The University of Arizona, 2010.
[5] KANG Lei, LIN Bin, ZHAO Zhan, et al. The traffic control system at urban intersections during the phase transitions based on VII [C]// International Conference on Computer Application and System Modeling (ICCASM). [S.l.]:[s.n.], 2010: 137-141.
[6] ABULEBDEH G, CHEN H. Exploring the potential benefits of intellidrive enabled dynamic speed control in signalized networks [C]// Transportation Research Board. [S.l.]:[s.n.],2010: 1-19.
[7] MALAKORN K J, PARK B. Assessment of mobility, energy, and environment impacts of intellidrive-based cooperative adaptive cruise control and intelligent traffic signal control [C]// Proceedings of the 2010 IEEE International Symposium on Sustainable Systems and Technology. [S.l.]:[s.n.],2010: 1-6.
[8] YANG Yudi, CHEN Shenyang, SUN Jian. Modeling and evaluation of speed guidance strategy in VII system [C]// 13th International IEEE Annual Conference on Intelligent Transportation Systems. [S.l.]:[s.n.],2010: 1045-1050.
[9] CHEN Shenyang, SUN Jian, YAO Jing. Development and simulation application of a dynamic speed dynamic signal strategy for arterial traffic management [C]// 14th International IEEE Annual Conference on Intelligent Transportation Systems. [S.l.]:[s.n.],2011: 1349-1354.
[10] NEKOUI M, NI D, PISHRO-NIK H. Development of a VII-enabled prototype intersection collision warning system [J]. International Journal of Internet Protocol Technology, 2009, 4(3): 173-181.
[11] FENG Yiheng, HEAD K L, KHOSHMAGHAM S, et al. A real-time adaptive signal control in a connected vehicle environment [J]. Transportation Research Part C, 2015, 55: 460-473.
[12] ZHAO Yunjie, WANG A, HOU Yunfei, et al. Integrated traffic-driving-networking simulator for the design of connected vehicle applications: Eco-signal case study [J]. Journal of Intelligent Transportation Systems, 2014, 20(1): 1-13.
[13] LI Mozan, ZHANG Linan, YANG Xiaoguang. A review of yellow dilemma problem and a dynamic speed guidance system design based on CVIS [J]. Procedia-Social and Behavioral Sciences, 2013, 96: 473-479.
[14] RAKHA H, KAMALANATHSHARMA R K. Eco-driving at signalized intersections using V2I communication [C]// Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems. [S.l.]:[s.n.], 2011: 341-346.
[15] CAI Baigen, ZHENG Ziru, SHANGGUAN Wei, et al. Unsignalized cooperative optimization control method based on vehicle speed guidance and information interaction [C]// Proceedings of 17th International Conference on Intelligent Transportation Systems. [S.l.]:[s.n.], 2014: 57-62.
[16] WU Wei, LI Pengkai, ZHANG Y. Modelling and simulation of vehicle speed guidance in connected vehicle environment [J]. International Journal of Simulation Modelling, 2015, 14(1): 145-157.
[17] 李鹏凯,杨晓光,吴伟,等.车路协同环境下信号交叉口车速引导建模与仿真[J].交通信息与安全,2012,30(3):136-140.
LI Pengkai, YANG Xiaoguang, WU Wei, et al. Modeling vehicle speed guidance at signalized intersections under IntelliDriverSM [J]. Journal of Transport Information and Safety, 2012, 30(3): 136-140.
[18] 李鹏凯,吴伟,杜荣华,等.车路协同环境下多车协同车速引导建模与仿真[J]. 交通信息安全, 2013,31(2): 134-139.
LI Pengkai, WU Wei, DU Ronghua, et al. Modeling and simulation of multi-vehicles cooperative speed guidance under connected vehicles [J]. Journal of Transport Information and Safety, 2013,31(2): 134-139.
[19] 张存保,陈超,严新平.车路协同下信号控制交叉口两难区问题改善方法[J].中国安全科学学报,2012,22(6):86-91.
ZHANG Cunbao, CHEN Chao, YAN Xinping. Methods for alleviating dilemma zone problem of signal control intersection based on cooperated vehicle infrastructure system [J]. China Safety Science Journal, 2012, 22(6):86-91.
[20] 梅朝辉. 车路协同环境下干线交叉口信号协调控制方法研究[D]. 武汉:武汉理工大学, 2014.
MEI Chaohui. Research on Arterial Traffic Signal Coordinated Control Method Based on Cooperative Vehicle Infrastructure System [D]. Wuhan: Wuhan University of Technology, 2014.
[21] 张存保,冉斌,梅朝辉,等. 车路协同下道路交叉口信号控制优化方法[J]. 交通运输系统工程与信息, 2013, 13(3): 40-45.
ZHANG Cunbao, RAN Bin, MEI Zhaohui, et al. An optimization method of traffic signal control based on cooperative vehicle infrastructure system [J]. Journal of Transportation Systems Engineering and Information Technology, 2013, 13(3): 40-45.
[22] 张鹏娜,曾庆喜,祝雪芬, 等. 卫星定位软件接收机研究综述[J]. 河北科技大学学报,2016, 37(3): 220-229.
ZHANG Pengna, ZENG Qingxi, ZHU Xuefen, et al. Research progress of satellite positioning software receiver [J]. Journal of Hebei University of Science and Technology, 2016, 37(3): 220-229.
Vehicle speed guidance strategy at signalized intersection based on cooperative vehicle infrastructure system
JIA Fengyuan1, LI Zhongbing1, CHEN Qingdong1, MA Xiaolu2, ZENG Qingxi3
(1.Chery Automobile Company Limited, Wuhu, Anhui 241000, China; 2. Institute of Electrical and Information Engineering, Anhui University of Technology, Maanshan, Anhui 243002, China; 3. Self-driving Vehicle Research Center, Nanjing University of Aeronautics and Astronautics, Nanjing, Jiangsu 210016, China)
In order to reduce stopping time of vehicle at a signalized intersection, aiming at the difficulty, even the impossibility to obtain real-time queue length of intersection in third and fourth-tier cities in China sometimes, a speed guidance strategy based on cooperative vehicle infrastructure system is put forward and studied. For validating the strategy, the traffic signal timing data of the intersection at Hengshan Road and North Fengming Lake Road in Wuhu is collected by a vehicular traffic signal reminder system which is designed. The simulation experiments using the acquired data are done by software VISSIM. The simulation results demonstrate that the strategy under high and low traffic flow can effectively decrease the link travel-time, reducing average ratio is 9.2 % and 13.0 %, respectively, and the effect under low traffic flow is better than that under high traffic flow. The strategy improves efficiency of traffic at a signalized intersection and provides an idea for the application of vehicle speed guidance based on cooperative vehicle infrastructure system.
wireless communication technology; cooperative vehicle infrastructure system; traffic light; VISSIM; speed guidance; intersection
TP274
A
2017-06-01;
2017-07-17;责任编辑:冯 民
国家自然科学基金(51505221);安徽省博士后研究人员科研活动经费资助项目(2016B086);国家发改委物联网专项项目((2012)1149)
贾丰源(1983—),男,吉林敦化人,博士,主要从事车联网技术方面的研究。
曾庆喜博士。E-mail:jslyzqx@nuaa.edu.cn
贾丰源,李中兵,陈庆东,等.车路协同环境下信号交叉口车速引导策略[J].河北科技大学学报,2017,38(5):432-437.
JIA Fengyuan,LI Zhongbing,CHEN Qingdong,et al. Vehicle speed guidance strategy at signalized intersection based on cooperative vehicle infrastructure system[J].Journal of Hebei University of Science and Technology,2017,38(5):432-437.
