基于干扰方位跟踪的自适应干扰抑制方法
2017-10-26曾祥旭章新华李鹏焦义民
曾祥旭,章新华,李鹏,焦义民
基于干扰方位跟踪的自适应干扰抑制方法
曾祥旭1,章新华2,李鹏3,焦义民1
(1. 海军大连舰艇学院研究生队,辽宁大连 116018;2. 海军大连舰艇学院军事海洋系,辽宁大连 116018;3. 哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001)
针对复杂海洋环境中声呐探测弱目标易被强干扰淹没的问题,提出一种对被动声呐探测到的强干扰源进行跟踪抑制的方法,通过对观测数据的互谱密度矩阵(Cross Spectral Density Matrix,CSDM)进行特征分解,根据干扰方位范围的先验知识,对干扰源的方位进行跟踪,依据方位信息选择代表强干扰的特征向量,依此根据不同的算法重构剔除了干扰信息的CSDM。数值仿真和海试数据验证结果表明,该方法能够在已知干扰初始方位区域的情况下自适应地抑制强干扰,较好地保留并提取目标信息,检测出感兴趣的目标。该方法为后续的目标识别与跟踪提供了有利条件。
自适应干扰抑制;干扰方位跟踪;互谱密度矩阵;特征分解
0 引言
在复杂的海洋环境中,尤其在海面干扰数目多、干扰强度大的情况下,被动声呐探测范围内的感兴趣弱目标信号往往被强干扰所淹没,传统的目标检测算法无法有效地检测出弱目标。研究如何得到具有更高信干比与信噪比的信号,从而提高对弱目标的检测能力具有重大意义。
在以前的研究工作中,提出了一种基于强干扰抑制的弱目标检测方法,其思想源于Cox在2000 年提出的一种子空间的自适应干扰抑制方法[1]:在短时间内(较少的采样次数)干扰强度远大于目标信号强度时,大特征值对应的就是强干扰占主导的特征向量,通过重构剔除该部分特征向量的互谱密度矩阵来对强干扰进行抑制。基于强干扰抑制的弱目标检测方法通过常规波束形成得到空间上的能量分布从而预估计强干扰个数,将这几个能量最强的信号当作干扰并利用特征子空间进行抑制,提高了对弱目标的检测能力。通过数值仿真与海试数据验证了该方法的可行性和有效性,其优势在于,不需要任何关于干扰或是目标的先验信息,普适性较强。但是该方法仍然存在一些缺陷。
在以前的研究工作中发现在宽带环境下使用该方法进行宽带非相干处理时,由于水下目标的线谱分量存在,在某些子频带,能量最强的几个信号不一定就是干扰,也有可能是感兴趣的水下弱目标。这意味着该方法在这些子频带上将要抑制的几个最强的信号也有可能包含感兴趣目标,所以该方法在宽带环境下有效抑制强干扰的同时也会抑制感兴趣弱目标的能量,在检测目标信号的性能上具有局限性。基于此,本文在对干扰方位进行跟踪的基础上,对每一个子带上的干扰进行针对性较强的抑制,可以有效地保留目标的信息,提高了目标检测性能。
1 数据模型



2 自适应干扰跟踪抑制方法
根据上述阵列数据模型,其各个频率分量对应的基阵接收数据波束形成的空间功率谱估计为[3]

其中,使用常规波束形成(Conventional Beam Forming,CBF)[4]方法时,
使用最小方差无失真响应(Minimum Variance Distortionless Response,MVDR)[5]方法时,
其中,为宽带处理的频点数。
根据特征分解方法[7],互谱密度矩阵可以分解成以下的形式:


并且其子矩阵满足:



在实际应用中,我们往往无法实时、精确地知道干扰的真实方位,但是由于干扰的能量往往比较大,相比弱目标跟踪更为容易,由此可以通过对干扰源进行跟踪得到干扰所在方位的范围。

由式(14)即可得到对干扰方位区域内的干扰进行了抑制的空间功率谱估计,可表示为

宽带处理的空间谱估计由各频率分量空间谱求和再平均得到:
3 数值仿真与理论分析
本节通过数值仿真来分析自适应干扰跟踪抑制方法的有效性。在MVDR方法的基础上,对应用该方法处理前后的处理结果进行比较。仿真过程中假设48阵元、相邻阵元间距为5 m的水平均匀线列阵,信源采用单频信号,声速为1 500 m/s。仿真中用零均值高斯白噪声模拟阵元噪声,并且各阵元间噪声相互独立,噪声与信号、信号与信号以及信号与干扰之间都相互独立。两个信噪比为-5 dB的目标分别位于40°和90°;两个干噪比分别为30 dB和25 dB的强干扰位于43°和85°;三个干噪比为5 dB的干扰分别位于20°、60°和110°。
仿真中,已知干扰范围为83°~87°与41°~45°,得到该方法应用前后的MVDR归一化空间功率谱估计如图1、2所示。
比较图1和图2可知,利用该方法进行干扰抑制前后的空间功率谱估计,使用MVDR方法得到的结果中,空间谱图中的目标峰值完全被强干扰的旁瓣掩盖,无法检测出目标信号;经过本文方法处理后MVDR得到的结果中,有效抑制了在43°和85°方位的两个强干扰,准确地检测出了在40°和90°方位的两个弱目标。数值仿真结果表明,本文提出的自适应干扰跟踪抑制方法能够有效地抑制强干扰、检测弱目标,极大地提高了输出信干比和信噪比。
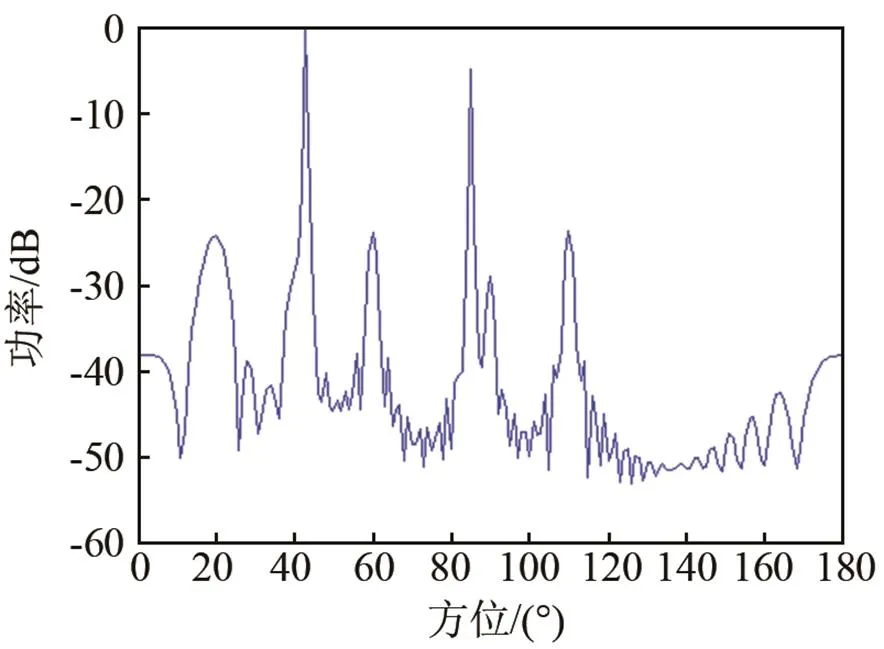
图1 干扰抑制前MVDR归一化功率谱估计
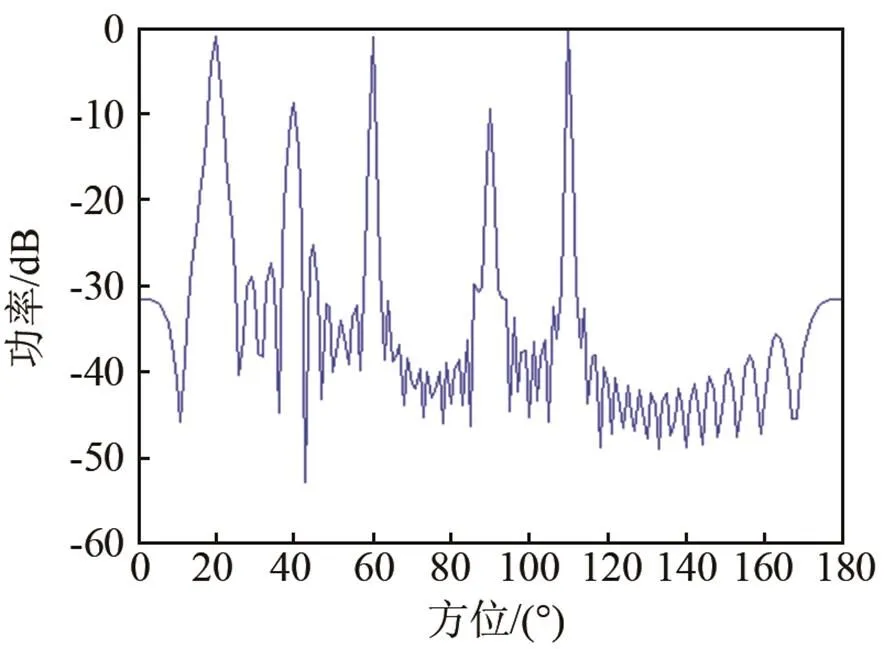
图2 干扰抑制后MVDR归一化功率谱估计
该方法需要初始干扰方位范围的先验信息,后续的干扰方位范围可以通过在本文的前期工作中对干扰源的有效跟踪得到。相比常规的对目标进行跟踪检测的方法,由于干扰的能量强度往往较大,对干扰的跟踪抑制较为容易实现,这是该方法的优势所在,并且相比较前期工作提出的基于强干扰抑制的弱目标检测方法,该方法可以更好地保留目标信息。
4 海试数据验证
海上数据采集过程中,阵列为48阵元、2 m阵元间隔的拖曳线阵,声速约为1 500 m/s,处理频段满足半波长。图3是CBF与本文方法对实际水中目标估计的方位历程对比。
从图3对海上实测数据的处理结果来看,被动声呐探测海域内同时存在多个强度不一、轨迹不同的强干扰。常规波束形成方法对于强干扰的航迹检测非常清晰,而对于123°左右的感兴趣弱目标的检测比较模糊,对于其余空间方位的弱信号的检测能力也非常有限。而通过对初始方位为48°和93°左右的强干扰源进行跟踪抑制,可以看出几个强干扰的历程被明显抑制,而123°左右的感兴趣弱目标的轨迹得到了明显增强。
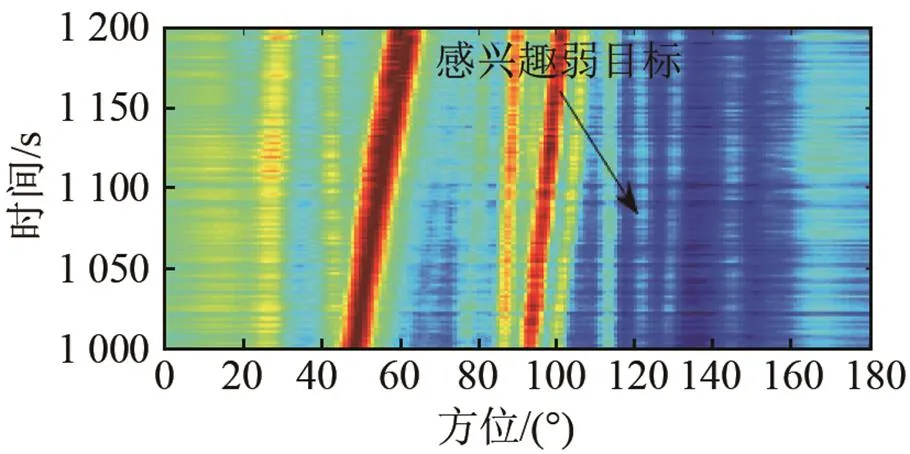
(a) CBF历程图
(b) 干扰源跟踪抑制历程图
图3 使用CBF和本文提出方法的目标方位历程对比
Fig.3 The comparison between target azimuth histories of using CBF and the proposed method in this paper
5 结论
本文提出了基于干扰方位跟踪的干扰抑制与目标检测方法,利用对干扰方位的跟踪,得到实时的干扰方位区域估计,通过子空间类干扰抑制方法重构剔除了干扰的CSDM,提高了输出信干比和处理增益。数值仿真表明,该方法可以有效地抑制已知初始方位的强干扰,为进一步的目标检测提供了有利条件。
本文方法需要对干扰方位进行跟踪,而后自适应地进行干扰抑制,运算量较大,并且该方法在目标与干扰交叉的情况下也有局限性,会同时对干扰以及邻近方位的目标进行抑制。在后续研究中,将在本方法的基础上,通过水面水下的起伏特性差异来抑制水面干扰,检测水下目标,进一步提高干扰抑制能力。
[1] Cox H. Multi-rate adaptive beamforming(MRABF)[C]//Proc. Sensor Array and Multichannel Signal Processing Workshop, Cambridge MA, 2000(13): 306-309.
[2] 王永良, 陈辉, 彭应宁. 空间谱估计与算法[M]. 北京: 清华大学出版社, 2004: 18-81. WANG Yongliang, CHEN Hui PENG Yingning. Spatial spectrumestimation and algorithm[M]. Beijing: Tsinghua University Press, 2004: 18-81.
[3] 陈阳. 水声阵列信号处理理论及实验研究[D]. 哈尔滨: 哈尔滨工程大学, 2009. CHEN Yang. Theoretical and experimental study on underwater acoustic array processing[D]. Harbin: Harbin Engineering University, 2009.
[4] 孙超. 水下多传感器阵列信号处理[M]. 西安: 西北工业大学出版社, 2007: 230-277. SUN Chao.Underwater multi sensor array signal processing[M]. Xian: Northwestern Polytechnical University Press, 2007: 230-277.
[5] Capon J. High-resolution frequency-wavenumber spectrum analysis [J]. Proceedings of the IEEE, 1969, 57(8): 1408-1418.
[6] Gorodnitsky I F, Geoge J S, Rao B D. Neuromagnetic source imaging with focuss: A recursive weighted minimum norm algorithm[J]. J. Electroenceph Clinical Neurophysiol, 1995, 95(4): 231-251.
[7] 张贤达. 矩阵分析与应用[M]. 北京: 清华大学出版社, 2004. ZHANG Xianda. Matrix analysis and application[M]. Beijing: Tsinghua University Press, 2004.
[8] 岳剑平. 水下目标被动跟踪研究[D]. 哈尔滨: 哈尔滨工程大学, 2004. YUE Jianping. The study on passive tracking of underwater moving target[D]. Harbin: Harbin Engineering University, 2004.
A method of adaptive interference suppression based on interference azimuth tracking
ZENG Xiang-xu1, ZHANG Xin-hua2, LI Peng3, JIAO Yi-ming1
(1. Graduate Student Division, Dalian Navy Academy, Dalian 116018, Liaoning, China;2. Department of Military Oceanography, Dalian Navy Academy, Dalian 116018, Liaoning, China;3. Department of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, Heilongjiang, China)
For sonar detection in real ocean environment, the target of interest is often submerged in strong interferences. In this paper, a method with the feature that some of the most powerful interferences detected by the sonar can be adaptively tracked and suppressed is proposed. According to the priori information of these strong interference azimuth ranges, we use the eigen-decomposition of the cross-spectral density matrix(CSDM) of observation data adaptively to track these strong interferencesand choose the eigenvectors representing the strong interferences. Then the CSDM that eliminates the interference information is reconstructed by using different algorithms. The validation results of numerical simulation and sea trial data show that this method can effectively suppress interferences, extract the target information and detect the target of interest.Moreover, this method can provide favorable conditions for subsequent target recognition and tracking.
adaptive interference suppression;interference azimuth tracking; cross-spectral density matrix; eigen- decomposition
TN911.7
A
1000-3630(2017)-03-0293-04
10.16300/j.cnki.1000-3630.2017.03.017
2016-10-04;
2016-12-08
国家自然科学基金资助项目(61271443)
曾祥旭(1994-), 男, 江西于都人, 硕士研究生, 研究方向为水声信号处理。
曾祥旭, E-mail: 1092075664@qq.com
