水下蛙人呼吸声Mel倒谱特征的实验研究
2017-10-26朱知萌章佳荣
朱知萌,郭 育,王 冠,章佳荣
水下蛙人呼吸声Mel倒谱特征的实验研究
朱知萌,郭 育,王 冠,章佳荣
(中国船舶工业系统工程研究院,北京100094)
为提高水下蛙人呼吸声识别的准确度,提出一种基于Mel频率倒谱系数(Mel Frequency Cepstrum Coefficient,MFCC)的蛙人呼吸声信号特征匹配方法。计算呼吸声信号之间、信号与环境噪声及舰船辐射噪声的MFCC夹角和MFCC距离并进行匹配比较,以进行分类识别。某湖试验数据的处理结果表明:蛙人呼吸声与舰船辐射噪声及环境噪声的MFCC参数有着明显的差异,能够对蛙人呼吸声信号与干扰噪声进行区分,证明了基于MFCC特征算法的有效性,对发展港口、码头等近海海域附近的水下蛙人探测声呐和预警系统具有实际意义。
被动声呐;水下小目标;Mel频率倒谱系数;特征匹配
0 引言
近年来,蛙人对各国海军及海事安全构成的威胁逐年加剧,各国纷纷加大了针对蛙人的探测和识别研究。通常,在重要的港口、码头等近海海域以某种阵列布放传感器,形成一道或多道警戒线,对入侵的目标进行探测和识别。
国内外关于主动法探测蛙人已开展了较多研究,Sarangapani[1]等人基于傅里叶映射法(Fourier Modal Method,FMM)构建了蛙人目标强度模型;Hollet[2]等人计算得到特定频率的开式和闭式呼吸器的目标强度;Zampolli[3]等人利用软壳柱状空气腔和硬壳柱状空气腔来模拟蛙人的肺部组织和呼吸器的钢瓶,并通过实验得到了不同频率和散射方向的蛙人目标强度;姜卫[4]等人用动物的肺部组织来模拟蛙人肺部组织,并用比较法测量其目标强度,其平均目标强度在20~40 kHz频率范围内约为-25.3 dB;张波[5]等人对影响蛙人目标强度的因素进行了探究,通过理论仿真和实验,发现蛙人呼吸时产生的大量气泡对回波信号做出了主要贡献,是影响蛙人目标强度的最大因素,其次是蛙人携带的开式或闭式呼吸器,而蛙人的身体组织对目标强度的影响则微乎其微。
国内外基于被动方式探测蛙人的研究工作较少。美国斯蒂文森理工学院和荷兰防御应用科学研究院对蛙人辐射噪声进行了相关研究[6-12],并研制出了相应的SPADES和Delphinus水下被动探测系统,后者的最远探测距离可达350 m。国内张伟豪[13]等人对蛙人呼吸声信号的时频域特征进行了研究,并基于带通滤波法和匹配滤波法,对蛙人呼吸声信号提取了四种谱特征量,实验结果显示,匹配滤波法在蛙人运动到距离声呐40 m过程中的检测概率可达90%。
蛙人不同于水下安静目标,其具有较为规律的声辐射特性。蛙人吸气时,压缩空气在高压调节器及其管道中扩散,阀套产生的结构振动以及呼气气泡在上升过程中的破裂,都会向周围环境产生声辐射,其辐射的过程即为蛙人呼吸声信号向外传播的过程,利用被动声呐接收呼吸声信号,可对蛙人进行被动探测。蛙人的活动范围为近海海域,通常有较多舰船停靠或活动,被动声呐接收到的信号常常混有舰船辐射噪声和环境噪声,这些噪声则成为主要的背景干扰。对蛙人呼吸声信号和噪声信号进行特征提取,并对提取结果做进一步处理进而区分它们的类型,是蛙人被动探测的主要内容。
人耳的听觉系统具有较高的灵敏度和动态范围,能够在嘈杂环境中辨别出各种不同的声音信号。将人耳的这种优势应用到蛙人的探测中,能够较好地区分蛙人呼吸声信号与干扰噪声。在语音信号处理中,Mel频率倒谱系数结合了非线性信号中的倒谱分析技术与人耳的高分辨率特性而被广泛应用。本文通过提取信号的MFCC特征参量,利用呼吸声信号与噪声信号之间的MFCC夹角和MFCC距离进行匹配,找出蛙人呼吸声信号与噪声信号的差异,为水下蛙人的被动探测提供一种有效的方法。
1 信号倒谱分析理论
信号的倒谱是在对非线性信号进行同态处理过程中产生的物理量,旨在将非线性信号转换为线性信号进行处理。

设()为水声信道响应,则被动声呐接收到的信号()是由信号()和信道响应()卷积而成的卷积信号:
信号()将通过同态处理系统[]变换后可得到一个经过处理的卷积信号():
图1 同态系统分解
Fig.1 Decomposition of the homomorphic system
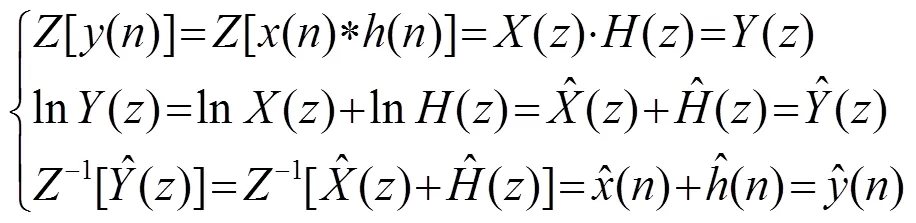
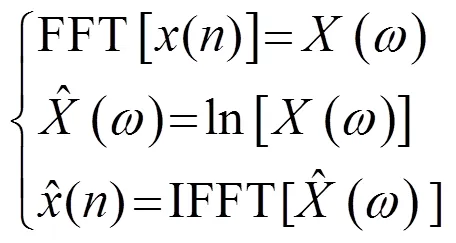

对式(6)取对数:


()即为信号()的倒谱(Cepstrum),称之为倒频率(Quefrency)。
2 基于人耳听觉特性的MFCC特征提取
Mel频率倒谱系数(MFCC)是一种基于人耳听觉感知机理所提取的特征参量。耳蜗是人耳辨别语音信号最关键的部位,具有多分辨率特性,理论上可等效为一个滤波器组,能对不同频率的信号产生不同的响应。根据Stevens和Volkman早年的研究[15],耳蜗的感知频率与信号的频率有如下关系:

2.1 Mel滤波器组的设计




2.2 MFCC特征参数提取
MFCC特征参数的提取步骤如图2所示,包括预处理、快速傅里叶变换、计算谱线能量、计算Mel滤波器能量和计算离散余弦变换(Discrete Cosine Transform, DCT)倒谱。

图2 MFCC参数特征提取流程
2.2.1 预处理
预处理是计算信号MFCC参数的基础,其主要包括信号分帧和加窗函数两个步骤。
2.2.2 快速傅里叶变

2.2.3 计算谱线能量
计算经过FFT变换后每一帧信号的谱线能量:
式中:表示第帧信号;表示频域上的第条谱线。
2.2.4 Mel滤波


2.2.5 求DCT倒谱
与传统傅里叶变换相比,DCT具有功率谱分量更加丰富、能量更加集中且不需要对信号的相位进行估算,减少了计算量和计算误差等优点,信号()的DCT如下[16]:
式中,()为正交因子,它为保证矩阵变换的规范性而存在,具体表示如下:
将式(15)计算出的Mel滤波器组的能量取对数后计算其DCT,即得到了信号的MFCC参量:

3 实验分析
3.1 实验简介
2014年9月在某湖进行湖上实验,用标准水听器采集了蛙人呼吸声信号、环境噪声和舰船辐射噪声,实验布放见图3。标准水听器位于水下6 m深处,蛙人位于水下3 m深处,在水中处于相对静止状态并保持均匀节奏呼吸,蛙人与标准水听器的水平距离为10 m;实验当天晴朗无风,气象条件良好。
实验所用的标准水听器型号为8104,灵敏度为-207 dB;测量放大器采用B&K2610型,放大倍数为-60 dB,实验设备如图4和图5所示。
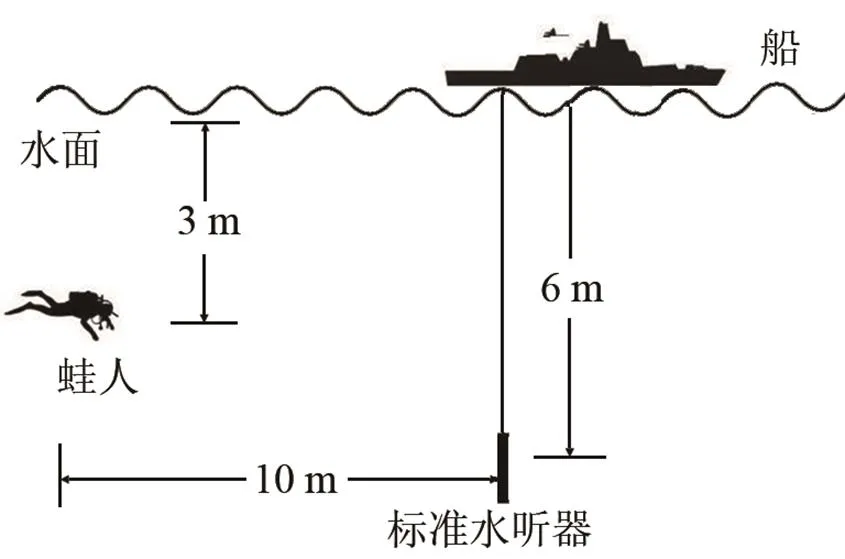
图3 实验布放示意图

图4 标准水听器8104
图5 测量放大器B&K2610
蛙人由一名身体素质良好、具有多年潜水经验的潜水教练员担任,并携带开式呼吸器进行水下任务,在湖面上用红色救生圈标记其水下的相对位置。如图6和图7所示。

图6 蛙人下潜
图7 潜水设备
3.2 实验数据处理
对湖试数据进行处理,分别对蛙人呼吸声信号、舰船辐射噪声和环境噪声提取MFCC特征,并对相邻周期呼吸声信号之间、相隔周期呼吸声信号之间、呼吸声信号与环境噪声之间及呼吸声信号与舰船辐射噪声之间的MFCC参量进行特征匹配,计算其MFCC夹角和MFCC距离。
本文截取接收到的蛙人呼吸声信号前7个周期进行处理,将每个周期的呼吸声信号与噪声信号都分为20帧,对140帧信号的MFCC参量进行统计平均。将两类信号的MFCC数值分别作为横坐标和纵坐标,坐标点为特征符号,特征符号的分布即为匹配结果:

对相邻周期呼吸声信号、相隔周期呼吸声信号、呼吸声信号与舰船辐射噪声、呼吸声信号与环境噪声的MFCC参量进行匹配,如图8~11所示。
在图8~11中,斜线为45°线,是MFCC参数匹配的准线,信号的MFCC特征越接近,则匹配情况越佳,特征符号应越靠近准线分布。从图中的结果可以看出,图8中蛙人相邻周期呼吸声信号之间和图9中相隔周期呼吸声信号之间的特征符号主要沿准线附近分布,呼吸声信号与环境噪声及舰船辐射噪声之间的特征符号在图中分布得较为分散。匹配结果表明:(1) 蛙人呼吸声信号彼此间的特性相近,周期不会改变蛙人呼吸声之间的相似性;(2) 蛙人呼吸声与噪声的特性存在巨大差异,MFCC是一种能够区分蛙人呼吸声与噪声的有效特征。值得注意的是,呼吸声信号与噪声之间的匹配结果虽然不在准线沿线分布,但其分布仍有一定规律性,为量化分析其中的差异,本文计算了其MFCC夹角与MFCC距离。
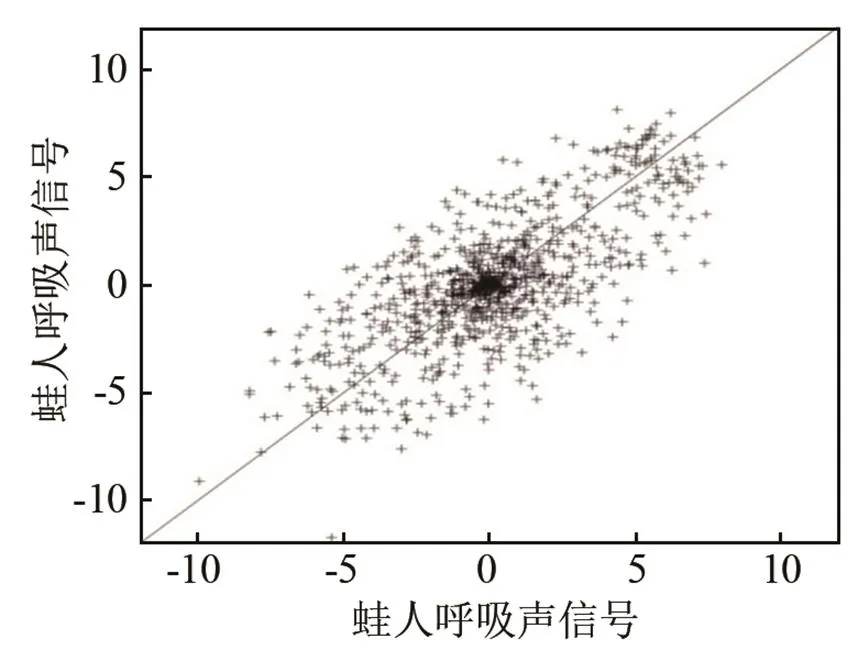
图8 相邻周期呼吸声信号MFCC参数匹配结果
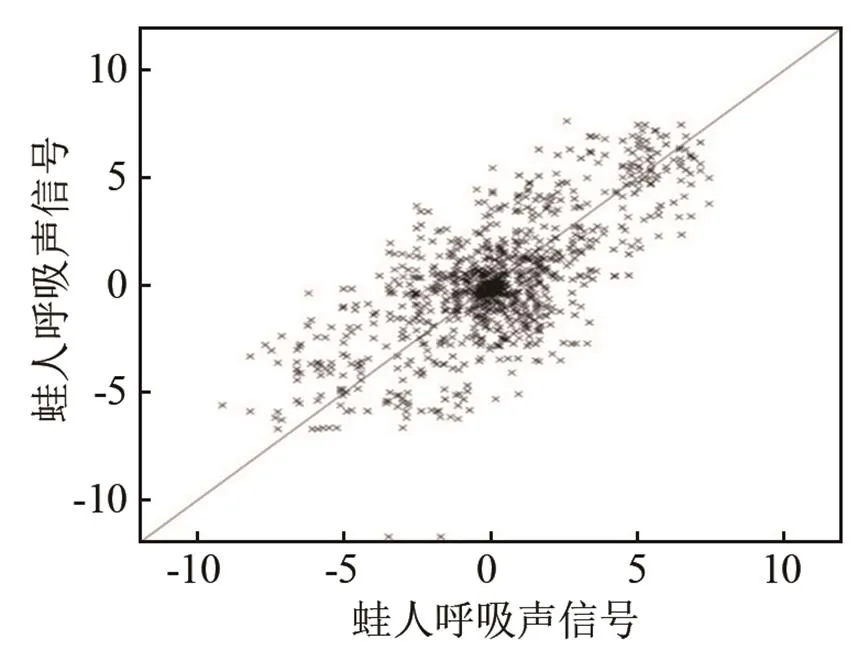
图9 相隔周期呼吸声信号MFCC参数匹配结果

图10 呼吸声信号与舰船辐射噪声MFCC参数匹配结果
3.2.1 MFCC夹角

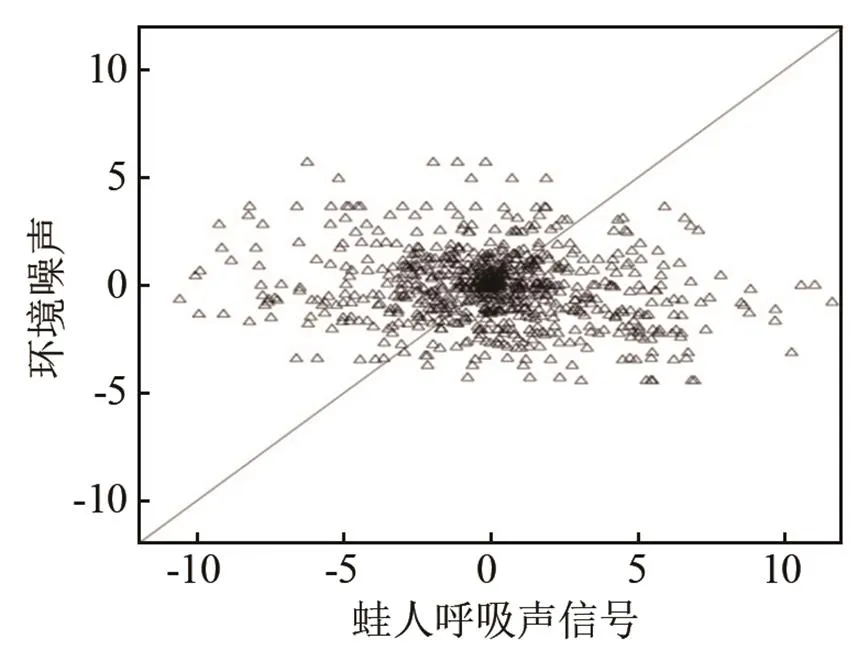
图11 呼吸声信号与环境噪声MFCC参数匹配结果
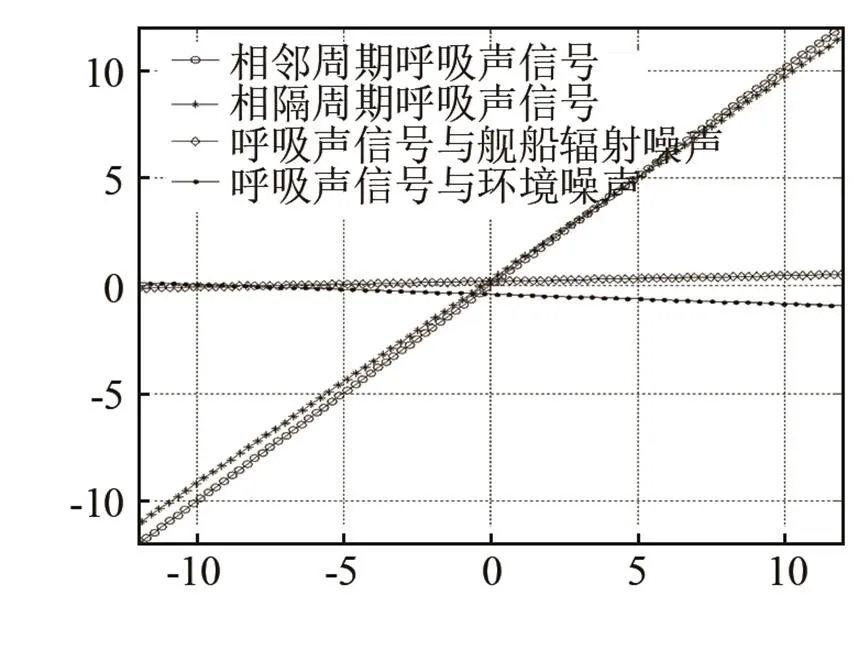
图12 MFCC特征拟合直线


表1 MFCC夹角
3.2.2 MFCC距离

从表2~4的计算结果可得出如下结论:(1) 相邻周期呼吸声信号之间的MFCC距离最小,其平均距离较为稳定,都在10上下浮动;而相隔周期呼吸声信号之间的MFCC距离与相邻周期呼吸声信号的MFCC距离没有明显差别,这个结果充分说明蛙人呼吸声信号的特性比较稳定,无论是否相邻,呼吸声信号都能够较好地进行MFCC参数匹配;(2) 呼吸声信号与舰船辐射噪声的MFCC距离最大,其平均距离较稳定地分布在30左右,这说明呼吸声信号与舰船辐射噪声信号之间的差异较为明显,通过这个数值可以有效地区分呼吸声信号与舰船辐射噪声;(3) 呼吸声信号与环境噪声的MFCC距离的平均值分布在16~18左右,该值域大于呼吸声信号之间的平均距离。现绘制各信号之间的MFCC参数平均距离曲线,如图13所示。
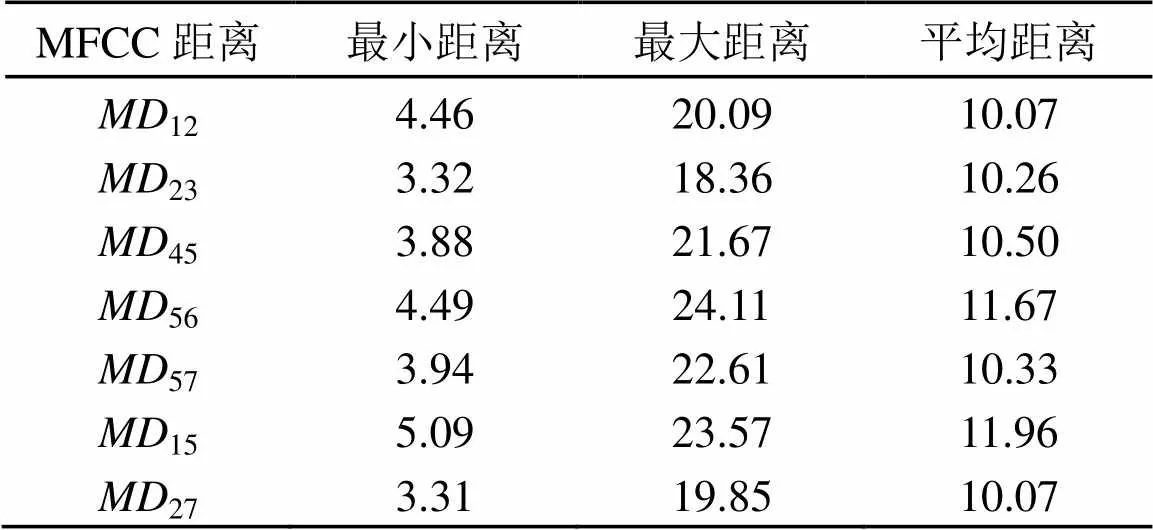
表2 不同周期的呼吸声信号之间的MFCC距离

表3 呼吸声信号与舰船辐射噪声之间的MFCC距离
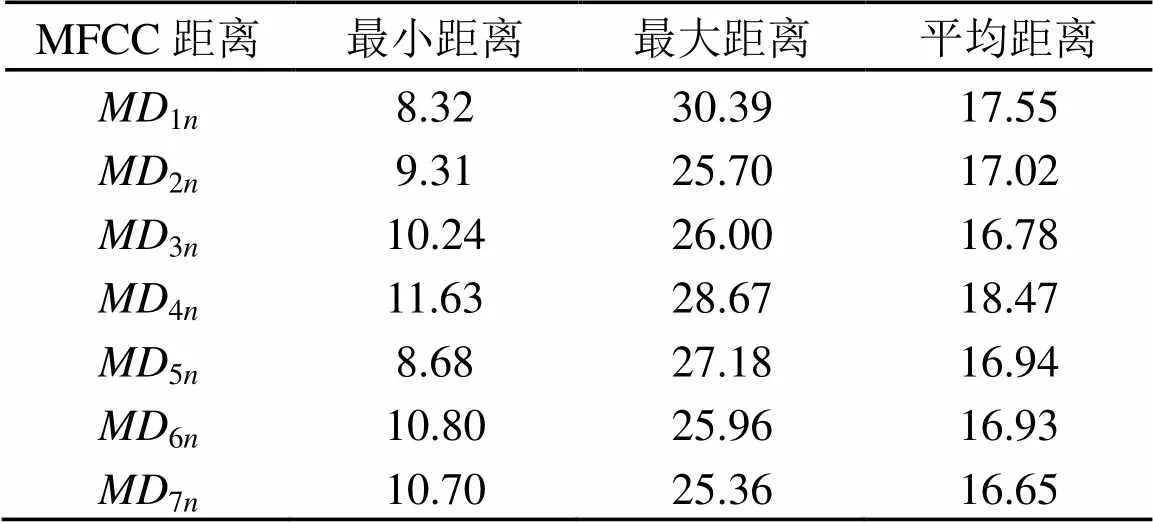
表4 呼吸声信号与环境噪声之间的MFCC距离

图13 各类信号间MFCC参数平均距离
从图13中可以看出,呼吸声信号之间、呼吸声信号与舰船辐射噪声及呼吸声信号与环境噪声的MFCC平均距离曲线分布于不重叠的区域,能够较好地将蛙人呼吸声信号、舰船辐射噪声及环境噪声进行区分。图中根据平均距离的分布值,可设置30和15两个检测阈值,当平均距离大于30时,可将接收信号判定为舰船辐射噪声;当平均距离介于15和20之间时,可将接收信号判定为环境噪声;当平均距离小于15时,则可判定接收信号为蛙人呼吸声信号,从而实现对水下蛙人的探测和识别。
4 结论
本文介绍了信号的倒谱分析模型和MFCC特征提取方法。结合湖试数据,提取了蛙人呼吸声、舰船辐射噪声和环境噪声的MFCC参量,得到了匹配蛙人不同周期呼吸声之间、呼吸声与舰船辐射噪声之间和呼吸声与环境噪声之间的MFCC参数的分布图。从参数分布线性拟合的MFCC辐射角和MFCC距离中得到的MFCC参量匹配结果能够反映不同信号的特征,可以作为辨别蛙人呼吸声与噪声的依据,并有如下结论:
(1) 匹配不同时段蛙人呼吸声的MFCC参数,分布有序,拟合直线辐射角接近45°,对于蛙人呼吸声与舰船噪声、蛙人呼吸声和环境噪声的MFCC参数,则分布散乱,拟合直线辐射角接近0°,体现了蛙人呼吸声信号与船舰干扰信号及环境噪声的显著差异;
(2) 从不同声信号的MFCC参数之间的距离计算得到,不同时段蛙人呼吸声信号MFCC距离为10左右,不具有显著差异;而呼吸声信号与舰船辐射噪声之间,以及呼吸声信号与环境噪声之间的MFCC距离分别为30左右和16~18左右,都具有显著差异。实验结果为有效改进蛙人的探测性能提供了重要依据。
[1] Sarangapani S, Miller J H, Potty G R, et al. Measurements and modeling of the target strength of divers[C]//6th Biennial Conference on Engneering Systems of Design and Analysis, vol. 2, Brest, France, 2005.
[2] Hollet R D, Kessel R T, Pinto M. At-sea measurements of diver target strengths at 100 kHz: measure technique and first results[R]. Hamburg, Germany: Undersea Defence Technology Conference and Exhibition 2006.
[3] Zampolli M, Jensen F, Tesei A. Review of target strength informat ion for waterside security applications[C]//Proceedings of the 1st Int. Conf. on Waterside Security (WSS 2008), Copenhagen, Denmark, August 2008.
[4] 姜卫, 范军, 胡碰. 声纳频段内动物体肺部组织目标强度的水下测量[J]. 声学技术. 2007, 26(5): 45-47. JIANG Wei, FAN Jun, HU Peng. The underwater measurement of the target strengths of animal lung tissue at the sonar frequency[J]. Technical Acoustics, 2007, 26(5): 45-47
[5] 张波, 马忠成. 蛙人目标强度的水下测量[J]. 声学技术, 2009, 28(5): 303-304. ZHANG Bo, MA Zhongcheng. Underwater measurement of target strength of diver[J]. Technical Acoustics. 2009, 28(5): 303-304.
[6] Borowski B, Sutin A, Roh H S, et al. Passive acoustic threat detection in estuarine environments[J]. Proc. SPIE, 2008, 6945: 694513- 694524.
[7] Stolkin R, Radhakrishnan S, Sutin A, et al. Passive acoustic detection of modulated underwater sounds from biological and anthropogenic sources[J]. oceans 2007, Sept. 29, 2007-Oct. 4, 2007: 1-8.
[8] CHEN X, WANG R, Tureli U. Passive acoustic detection of divers under strong interference[C]//MTS/IEEE Oceans 06, Boston, USA, 2006.
[9] Stolkin R, Sutin A, Radhakrishnan S, et al. Feature based passive acoustic detection of a diver[C]//SPIE Defense and Security Symposium, 2006.
[10] Kil W Chung, Hongbin Li, Sutin A. A frequency-domain multi-band matched-filter approach to passive diver detection. signals, systems and computers[C]//ACSSC 2007. Conference Record of the Forty-First Asilomar Conference on (11 April 2008), pp. 1252-1256.
[11] Stolkin R a, Florescu J.Probabilistic analysis of a passive acoustic diver detection system for optimal sensor placement and extensions to localization and tracking[C]//Oceans 2007 MTS/IEEE Conference, Vancouver, BC, 29 September October 2007.
[12] CHEN X, Tureli U. Passive acoustic detection of divers using single hydrophone[C]//40th Asilomar Conference on Signals, Systems, and Computers, ACSSC '06, Pacific Grove, CA, 29 October -1 November 2006.
[13] 张伟豪, 许枫. 水下蛙人被动探测技术实验研究[J]. 声学学报, 2012, 37(3): 301-307. ZHANG Weihao, XU Feng. Experiment and study of passive acoustic detection of underwater divers[J]. Acta Acustica, 2012, 37(3): 301-307.
[14] Herrera P, Peeters G, Dubnov S. Automatic classificatiton of musical instrument sounds[J]. Journal of New Music Research, 2003, 32(1): 3-21.
[15] Stevens S S, Volkman J, Newman E B. A scale for the measurement of the psychological magnitude of pitch[J]. J. Acoust. Soc. Am., 1937, 8(3): 185-190.
[16] 王娜, 陈克安. 基于人耳听觉特性的水下目标识别研究[C]//中国声学学会2006年全国声学学术会议论文集. 北京, 2006: 413-414. WANG Na, CHEN Kean. Investigation on underwater target recognition based on auditory characteristics[C]//Proceeding of ASC 2006 Chinese Acoustic Academy Conference, Beijing, 2006: 413-414.
Experimental research on Mel cepstrum feature of the underwater diver breathing-signal
ZHU Zhi-meng, GUO Yu, WANG Guan, ZHANG Jia-rong
(System Engineering Research Institute, Beijing 100094, China)
In order to improve the accuracy of the diver breathing-signal recognition, this paper presents a method of matching underwater diver breathing-signal based on MFCC. Breathing-signal of the underwater diver is obtained during the trial in Songhua River, Jilin province, and the MFCC angle and MFCC distance between breathing-signal, ship-radiated noise and ambient noise are calculated and matched. The results show that there is an obvious difference of the MFCC parameter between diver breathing-signal and noise, the validity of the MFCC based feature algorithm is verified, which has a reference value for the development of underwater diver sonar and early warning system in offshore areas.
passive sonar; underwater small target; Mel Frequency Cepstrum Coefficient (MFCC); feature matching
TB556
A
1000-3630(2017)-03-0286-07
10.16300/j.cnki.1000-3630.2017.03.016
2016-09-21;
2016-12-09
朱知萌(1990-), 男, 黑龙江哈尔滨人, 硕士, 工程师, 研究方向为水下小目标探测与识别、水声信号处理。
朱知萌, E-mail: zhuzhimeng@hrbeu.edu.cn。