积分对象的扩展非最小化状态空间预测控制
2017-10-18董旭吴胜梁逸敏俞纪鲲
董旭,吴胜,梁逸敏,俞纪鲲
(浙江邦业科技股份有限公司,杭州 310052)
积分对象的扩展非最小化状态空间预测控制
董旭,吴胜,梁逸敏,俞纪鲲
(浙江邦业科技股份有限公司,杭州 310052)
传统的预测控制在处理积分对象时,往往会因为模型与过程的失配,导致过程在受到持续干扰时会达到一个异于设定值的稳态。首先将积分对象的传递函数模型转换为扩展非最小化状态空间模型,然后结合预测控制完成对积分对象的控制。基于扩展非最小化状态空间模型的预测控制能有效地处理模型失配情况下的各种干扰,最后的仿真例子验证算法的有效性。
积分对象;扩展非最小化状态空间模型;预测控制;干扰
0 引言
积分过程对象广泛存在于实际工业过程中,例如锅炉汽包水位、精馏塔液位等[1]。由于模型与过程间的失配,当遇到连续的干扰时,传统的预测控制对积分过程的控制往往会失效,最终积分过程会达到一个异于设定值的稳态[2]。
对于积分过程的预测控制,很多学者做了相应的研究。邹涛等[3]分析了传统算法在模型失配的情况下无法对积分过程进行优化控制的原因,提出了一种新的反馈校正环节来改进传统算法。戴连奎[4]提出了一种改进的动态矩阵控制(DMC)算法,克服了传统算法中不能有效消除输入阶跃扰动所引起的控制余差的问题。针对非自衡对象DMC算法模型不易建立的问题,张政江等[5]提出了一种基于阶跃响应的非自衡对象DMC算法,该算法对于设定值变化以及输入扰动均无余差。刘桂芝等[6]针对DMC算法无法直接对非自衡对象进行控制的问题,推导了一种基于阶跃响应的改进DMC算法,该算法具有很强的抗干扰能力。Zhang Bin等[7]基于脉冲响应模型以及新的误差校正方法提出了一种积分对象的预测函数控制方法。Alvarez,Luz A等[8]结合预测控制以及实时优化提出了一种新的控制结构来解决积分对象的控制问题。Zhang,R.D.等[9]提出了一种基于扩展非最小化状态空间模型的预测控制策略,该方法的状态变量直接由实际输入输出组成,同时比传统预测控制拥有更多的调节自由度。
本文在文献[9]提出的方法的基础上,推导出了积分对象的扩展非最小化状态空间的预测函数控制,该方法有效地抵抗了各类干扰,同时其内部的调节自由度也保证了更好的综合控制性能。
1 积分对象的扩展非最小化状态空间模型
本文中,我们选取的积分对象的传递函数如下所示:

其中,s为拉普拉斯变换算子,K为模型的增益,T为模型的时间常数,t为模型的滞后时间。
在采样时刻Ts下,式子(1)中的传递函数可以转变为下面的离散方程:

其中,a1,a2,b1,b2为对应的离散系数,y(k),u(k)为k时刻过程的输出与输入,d为在采样时间Ts下的滞后周期。
在式子(2)左右两边各加上差分算子Δ可得:

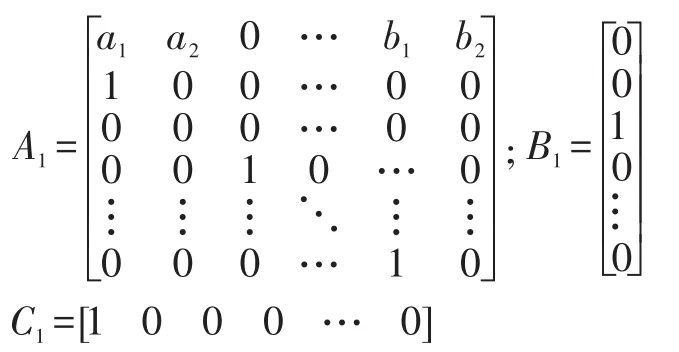
选取状态变量如下:

对应的非最小化状态空间模型为:

其中
定义设定值为c,跟踪误差可以计算如下:

结合式子(5)和(6),我们可以得到:

引入新的状态变量如下:

对应的扩展非最小化状态空间模型为:

其中:
矩阵中的0表示的是合适维数的零向量。
2 预测函数控制器设计
在本文中,我们选取预测函数控制来设计控制器。基于公式(9),我们可以得到未来时刻的状态预测输出:

其中,P为预测时域。
目标函数选取如下:

其中,Q,R分别为状态变量以及控制增量的加权。
结合式子(10)和(11),对目标函数J求导可得控制律如下:

得到控制增量Du(k)后,可构成如下控制量作用于被控积分对象。
3 仿真

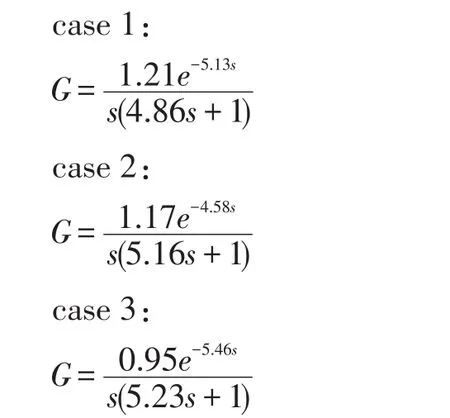
为了验证本文方法的有效性,这里引入文献[7]中的方法作为对比,同时由于实际中不可避免地存在各种干扰,这里我们选择三组失配的例子来进行验证。三组失配的例子如下:
本节选取文献[7]中的例子:
这里采样周期为1s,设定值为1,在k=100的时刻在输入端加入幅值为-0.1的阶跃干扰。对于文献[7]中的方法,参考轨迹柔化系数为0,旋转因子为0。对于两种方法,其余的控制参数如下所示:

表1 两种方法的控制参数
图1-3展示了三个例子下的输出响应,从整体上来说,本文中的方法的综合控制性能要优于文献[7]中的方法。在图1、图2和图3中,我们可以很清晰地看出本文的响应曲线更加光滑,超调以及震荡更加小;在抗干扰性能上,本文中的方法比文献[7]中的方法更优。
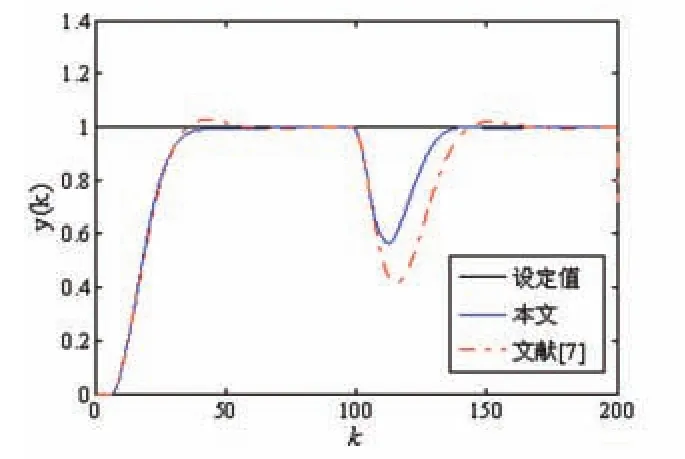
图1 case 1下两种方法的输出
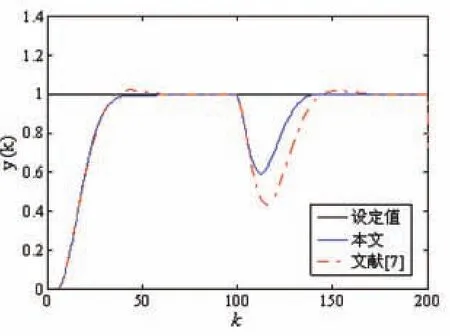
图2 case 2下两种方法的输出

图3 case 3下两种方法的输出
4 结语
本文提出了一种扩展非最小化状态空间模型的积分对象预测控制方法。该方法能很好地抵抗积分对象受到的各类干扰,同时其内部拥有的设计自由度可以保证控制器更好的综合控制性能。
[1]Santoro,B.F.,Odloak,D.Closed-Loop Stable Model Predictive Control of Integrating Systems with Dead Time[J].Journal of Process Control,2012,22(7):1209-1218.
[2]Wu,S.,Cui,Y.C.,Zhang,R.D.Predictive Control of Integrating Processes Based on a Novel Error Correction Method[C].33rd Chinese Control Conference,2014.
[3]邹涛,王丁丁,丁宝苍,于海斌.积分过程预测控制的稳态分析及反馈校正[J].控制理论与应用,2014,31(2):165-174.
[4]戴连奎.非自衡系统的动态矩阵控制[J].控制理论与应用,1999,16(5):744-746.
[5]张政江,孙优贤.基于阶跃响应的非自衡对象预测控制[J].控制与决策,2001,16(3):378-379.
[6]刘桂芝,李平,陈红艳.一类非自衡对象的改进动态矩阵控制[J].自动化与仪器仪表,2003(2):3-4.
[7]Zhang,B.,Yang,W.M.,Zong,H.Y.A Novel Predictive Control Algorithm and Robust Stability Criteria for Integrating Processes[J].ISA Transactions,50(3):454-460.
[8]Alvarez,L.A.,Francischinelli,E.M.,Santoro,B.F.Stable Model Predictive Control for Integrating Systems with Optimizing Targets[J].Industrial&Engineering Chemistry Research,2009,48(20):9141-9150.
[9]Zhang,R.D.,Xue,A.K.,Wang,S.Q.An Improved State-Space Model Structure and a Corresponding Predictive Functional Control Design with Improved Control Performance[J].International Journal of Control,2012,85(8):1146-1161.
Abstract:Caused by the model/plant mismatch in practice,the integrating process achieves the new steady state which is different from the set-point when it encounters a continuous disturbance under the control of the conventional predictive control.Firstly the transfer function model of the integrating process is transformed into the extended non-minimal state space(ENMSS)model.Then the predictive control is introduced to deal with the integrating process based on such model.The proposed approach can handle various disturbances under model/plant mis⁃matched cases for the integrating process,and the case study illustrates its effectiveness finally.
Keywords:Integrating Process;Extended Non-Minimal State Space Model;Predictive Control;Disturbance
Extended Non-minimal State Space Model Predictive Control for the Integrating Process
DONG Xu,WU Sheng,LIANG Yi-min,YU Ji-kun
(Zhejiang Banyear Technology Co.Ltd.,Hangzhou 310052)
精细化工气体反应和精馏的先进控制和优化项目、国家国际科技合作专项项目:工业回转窑能源管理和控制一体化关键技术(No.015DFA60200)
1007-1423(2017)26-0018-04
10.3969/j.issn.1007-1423.2017.26.004
董旭(1971-),男,辽宁锦州人,本科,工程师,研究方向为模型预测控制
吴胜(1988-),男,湖北荆门,硕士,软件开发工程师,研究方向为预测控制、PID控制
梁逸敏(1990-),女,浙江绍兴人,硕士,助理工程师,研究方向为热力工程模拟与优化,Email:liangym@bonyear.com
俞纪鲲(1955-),男,美国籍,博士,先进控制工程师,研究方向为先进过程控制
2017-06-27
2017-09-10
