平滑参考调节来提升电力驱动系统的动态响应
2018-07-04
汽车文摘 2018年7期
动态的系统在实际中出现超调现象不是我们期望的,不以牺牲系统响应速度为代价来减少超调量,可以提升系统允许运作的范围,使系统可以更接近极限工况去工作。关于设定值的调整的先前方法是提出了一种有效的策略去提升设定值的轨迹,通过基于响应的趋势和它的临近设定值的点来临时修正设定值,然而,这项策略是为不迟钝的固态单元所设计,它不能直接应用于应用程序,例如电子驱动系统,频繁的步改变设定值可能造成机械应力,这篇文章处理这个问题并且提出了一种交替的策略,基于连续性的改变设定值而不是离散的,提出的方法被运用于电子驱动系统,仿真和实验的结果证明了提出方法的理想行为。
在控制中,控制参数的选择对于有限带宽的物理系统是在响应速度、超调量、闭环系统稳定时间之间的一种权衡,典型的情况是允许某个大小的超调来换取更快响应速度。然而,超调减少了允许的系统的运作范围,而且,它可能破坏系统的运作限制而导致不稳定的情况,因此,减轻超调带给响应速度在闭环系统的影响是意义重大的。

Fig 3.运用SSPAACE来提升设定点的轨迹
之前的工作提出了一种叫做SPAACE的策略去提高设定值的跟踪能力(Fig 3.)。尽管证明了良好的行为,SPAACE不能直接应用于电子驱动系统(Fig 4.),因为有设定点步长的改变可能造成力矩的波动,并且反过来造成机械的疲劳和压力。在本文中,基于监控交换机制的方法被开发出来,以改善系统的跟踪能力,减少超调而不影响系统的速度。SSPAACE的设计和应用是很容易的,从其他不同工况的仿真和实验的结果证明了SSPAACE产生更小的超调,并且修改设定点比SPAACE更加平滑。
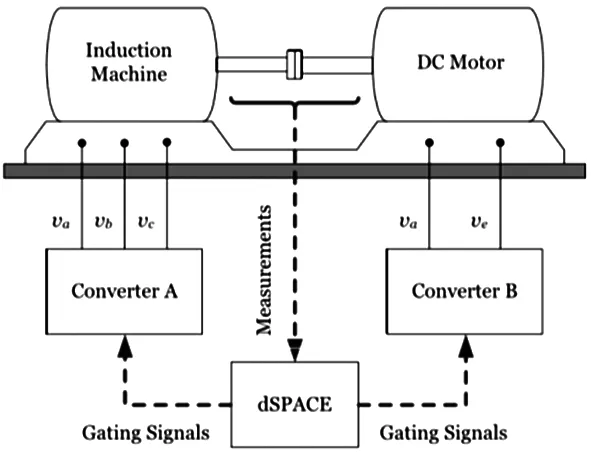
Fig 4.所研究的驱动系统原理图
