基于Bipod结构的星敏感器遮光罩安装结构优化设计
2017-09-23陈建峰余成武程会艳武延鹏
陈建峰,余成武,程会艳,隋 杰,武延鹏
(北京控制工程研究所,北京 100190)
基于Bipod结构的星敏感器遮光罩安装结构优化设计
陈建峰,余成武,程会艳,隋 杰,武延鹏
(北京控制工程研究所,北京 100190)
星敏感器是航天器中常用的姿态确定仪器,其测量精度较高,且受外界环境因素、尤其是温度因素影响显著.星敏感器的热稳定性对其精度有着重要的影响,为改善星敏感器的热稳定性,提出一种基于Bipod结构的星敏感器遮光罩安装结构优化设计.通过仿真分析,此设计极大的改善了星敏感器结构的热稳定性,提高了星敏感器在轨工作时光轴指向精度的稳定性,且星敏感器的强度与刚度条件均能满足安全设计要求.
星敏感器;Bipod结构;优化设计
0 引 言
星敏感器是航天器中常用的姿态确定仪器,硬件部分主要包括光学系统、机械结构、遮光罩以及电路等.星敏感器的测量精度较高,且受外界环境因素影响显著,尤其是温度因素(太阳辐照等外热流、深空背景辐射、星敏感器内部热耗、卫星热辐射等).在进行星敏感器结构设计时,除了要满足保证强度、刚度、稳定性等前提条件外,还要考虑整机的热设计及热稳定性设计.
由于工作环境的特殊性,星敏感器内部的传热方式通常为热传导、热辐射,无对流换热.这种条件不利于星敏感器传热,导致星敏感器内部温度不易均匀分布.在轨工作时,随着星敏感器交替进入阳照区与阴影区,星敏感器所受的外热流情况也随之发生交替变化.星敏感器中不乏易受温度变化影响的部位,例如法兰、遮光罩、镜头等.这些部位在温度环境发生变化时,其热变形会导致星敏感器精度稳定性下降.其中以遮光罩最为典型.遮光罩一般位于星敏感器结构的前端,且出于抑制杂光的要求用,其内部为吸收比较高的黑色.在受到太阳光的直接照射时,温升很快且温度较高;在进入阴影区无阳光照射时,温度又很快下降.在设计星敏感器结构时,通常在遮光罩与敏感器本体结构之间采取隔热设计.
热稳定性设计的目的即为在变化的空间温度环境作用下,一是保证星敏感器中对温度变化敏感结构温度的均匀性,二是保证一个结构在发生热变形时对另外结构的影响最小.星敏感器在轨环境条件恶劣,其精度对环境条件尤其是温度条件非常敏感.星敏感器的热稳定性对其精度有着重要的影响.本文针对这一设计目标,提出了一种基于Bipod结构的星敏感器遮光罩安装结构的优化设计.
1 Bipod结构
常见的Bipod结构的外观为二脚架形式,又称A字架[1].其作用主要有:1)能够降低支撑结构的重量,从而减轻产品的质量;2)Bipod结构多为离散多点支撑,热阻较大,能够有效隔热;3)Bipod结构相比传统支撑结构有较大柔性,能有效降低变形传递,有较好的卸载能力,尤其是温度载荷.
按照Bipod结构与被支承部组件连接的不同方式,可分为正向Bipod和逆向Bipod两种.正向Bipod通过3个点和被支承部组件连接,而逆向Bipod通过6个点和被支承部组件连接.常用的Bipod有一体式和分体式;一体式在结构上是一个整体,而分体式通常由两个独立杆件组合构成一个Bipod结构.此外,某些Bipod结构中还会附加柔性结构(柔节)设计,以增加其卸载能力[2].
例如Geoeye 主反射镜的支承结构就是分体式逆向Bipod结构[3],如图1所示.
再如西安光机所设计的某反射镜的支承结构采用带有柔节一体式正向Bipod结构[4],如图2 所示.
韩国标准科学研究院的研究人员也提出了一种带有柔性的Bipod结构来支承反射镜,并对其进行了设计优化[5],如图3所示.
Bipod结构在大口径望远系统中被广泛使用,多用来作为反射镜的支承,在星敏感器中应用还不太多.目前仅有AST301星敏感器的壳体与安装法兰间采用一体、逆向Bipod结构设计[6],如图4所示.
2 星敏感器结构优化设计
2.1星敏感器原设计方案
星敏感器原设计方案如图5所示.
原设计方案是将遮光罩安装于强度刚度均较好的一体结构上,遮光罩与星敏感器法兰之间通过一个圆锥台式的支撑结构连接.这种支撑结构虽然强度较好,但质量、刚度较大,遮光罩受热变形极易传递至星敏感器法兰上.另外遮光罩的热量也会随着遮光罩支撑结构传递至星敏感器法兰上.综合上述两种原因,采用此种设计不利于保证星敏感器在空间环境中的热稳定性.为提高星敏感器的热稳定性,本文提出基于Bipod结构的遮光罩支撑方案.
2.2Bipod结构设计要求
在进行Bipod结构设计时,需要考虑的参数主要包括高度、杆件间夹角、杆件所构成平面的倾斜角度、支撑截面几何参数等.Bipod结构设计首先应当满足强度和刚度要求.强度要求是任何机械结构设计时必须遵循的基本条件.Bipod支撑结构应保证被支承部组件及其支撑结构组件在工作环境条件下,包括严苛的发射环境及空间环境下,均不会发生破坏.刚度条件则是保证被支承部组件变形满足精度要求的必要条件.此外Bipod支撑结构的设计必须能够对空间环境温度载荷进行卸载,保证星敏感器的结构热稳定性.此外,文献[7]还建议配套的Bipod结构应用同一块材料加工.
2.3Bipod结构方案设计
在星敏感器原设计基础上,选择合适的Bipod结构支承方式.星敏感器在轨工作时,遮光罩的温度变化尤为剧烈.一方面为减小遮光罩温度变化对星敏感器本体结构温度的影响,一方面为减小遮光罩的热变形对星敏感器本体结构变形的影响,本文选择在遮光罩与星敏感器本体结构之间设计安装Bipod支撑结构.
由于星敏感器体积小重量轻,因此本文采用一体化Bipod结构设计.其中,Bipod支撑结构组件与本体结构安装法兰接触的6个点沿圆周均布.
由于遮光罩组件质量较轻,因此选用正向Bipod结构,即Bipod结构与遮光罩组件之间为三点接触,Bipod结构与星敏感器本体结构的安装法兰间为六点接触.另外,在设计Bipod结构时,其高度条件还需保证遮光罩与光学系统的位置关系不变,以免影响遮光罩的遮光效果.
为进一步加强遮光罩与本体结构之间的隔热设计,Bipod两脚架选用钛合金TC4材料.为增加星敏感器强度及刚度,在两脚架两脚间设计了加强梁.
3 星敏感器仿真分析
3.1星敏感器热-结构耦合仿真分析
为比较两种结构方式的差异,本文就外热流照射在遮光罩时星敏感器的光轴指向偏角进行了热-结构耦合仿真分析对比.仿真分析工况与边界条件设置为:在星敏感器主体法兰安装孔处施加固定约束;在遮光罩一侧外表面处设置热流密度,模拟太阳照射;在星敏感器外表面处设置热辐射系数,模拟其受深空冷背景辐射.两种结构方式的星敏感器分析时的边界条件与约束保持一致.
首先进行热分析,得到星敏感器的温度分布情况,如图6~7所示.由图中分析可知,原设计方案法兰温度远高于采用设计方案法兰的温度,说明Bipod方案的隔热效果优于原方案.此外从温度分布上看,Bipod方案法兰温度的均匀性明显优于原方案.
再将星敏感器温度场作为载荷施加到星敏感器结构上,进行静力学分析,得到星敏感器的热应力以及热变形情况.其中星敏感器主体法兰的变形云图与应力云图分别如图8~9所示.
由分析可知,在此约束条件和载荷作用下,星敏感器主体法兰最大变形量为0.067 mm,达到较大的量级.此时,将法兰上表面(光学系统安装面)的节点坐标导出,经数据拟合得到其法向量与Z轴(光轴方向)的夹角为0.27″.
将星敏感器遮光罩的支承结构更改为Bipod结构之后,在相同的约束与载荷条件下再次对星敏感器进行热-结构耦合分析.得到星敏感器主体法兰的变形、应力云图如图10~11所示.
由分析结果可知,此种状态下的星敏感器主体法兰最大变形量为0.003 4 mm,想比原状态有显著降低.将法兰上表面的节点坐标导出并通过平面拟合,得到其法向量与Z轴的夹角为0.1″,法兰的角变形也显著降低.
从上述分析结果看,采用Bipod结构的支承方式极大地减小了星敏感器主体法兰的应力与变形,改善了主体法兰上表面的角变形情况.由于光学系统直接安装在主体法兰上,其变形直接影响光学系统的光轴指向.当变形较小时,对光学系统指向稳定性的影响也会较小.
3.2星敏感器在轨光轴指向漂移分析
根据卫星运行轨道参数、星敏感器温控方案以及星敏感器内部电子元器件的功率等设置好边界条件以及约束条件,进行高温、低温两种工况条件下的瞬态热分析.此处的高温、低温工况均指轨道条件,高温工况与低温工况条件如表1所示.
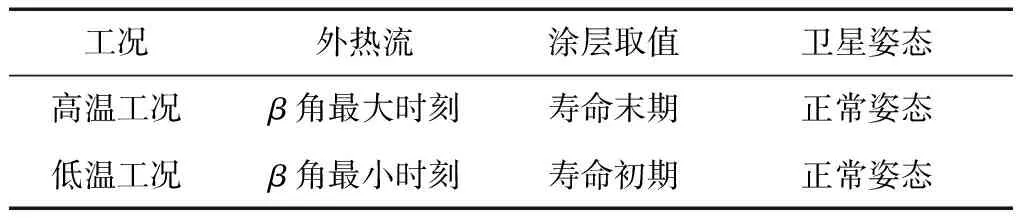
表1 工况设置Tab.1 The setting of working conditions
为简化后续热-结构耦合仿真分析,将一个轨道周期每隔240 s取一个计算点,将该时刻的温度数据作为载荷施加到星敏感器的分析模型上进行热-结构耦合仿真分析.其中一轨周期约90 min,假设起始时刻为进入阳照区时刻,60 min后进入阴影区.即第1~17时刻为阳照区,18~26时刻为阴影区.
在得到不同温度条件下的星敏感器变形结果之后,提取星敏感器光学系统镜面的变形数据,进行光轴指向漂移分析.
由于分析时镜片的面型由离散数据拟合而来,存在一定的计算误差.在计算星敏感器光轴指向精度时应当将此部分的误差滤除.因此在分析一个轨道周期内光轴指向漂移变化时,需用各时刻光轴指向漂移减去某一个基准值.本文以星敏感器光轴指向漂移在一个轨道周期内的中值作为参考.经仿真分析与计算,相对光轴指向精度的变化经计算如图12~13所示.
图中圆形数据点所示为绕X轴指向精度,方形数据点所示为绕Y轴指向精度,单位为″.高温工况条件下,在一个轨道周期中,绕X轴光轴指向偏角波动范围为±0.3″,绕Y轴光轴指向偏角波动范围为±0.24″.
低温工况条件下,在一个轨道周期中,绕X轴光轴指向偏角波动范围为±0.2″,绕Y轴光轴指向偏角波动范围为±0.17″.星敏感器在不同轨道时期(成像区区间为700~3 200 s)的精度如表2所示.
通过上述分析可知,采用Bipod支承结构星敏感器在考虑光学系统变形时,其在一个轨道周期中的光轴指向精度变化优于±0.3″,达到了设计指标.
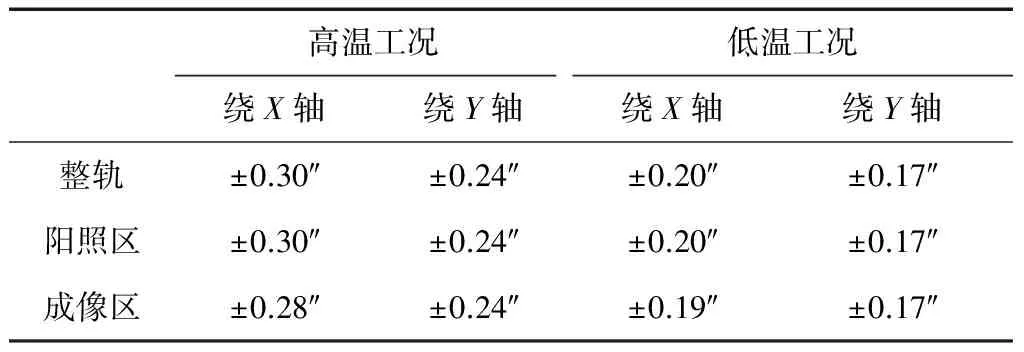
表2 绕Y、X轴光指向精度漂移Tab.2 The drift of accuracy of optic pointing direction about axis Y and axis X
3.3星敏感器抗力学条件分析
星敏感器抗力学条件分析中加速度、随机振动、冲击振动分析条件如表3所示.
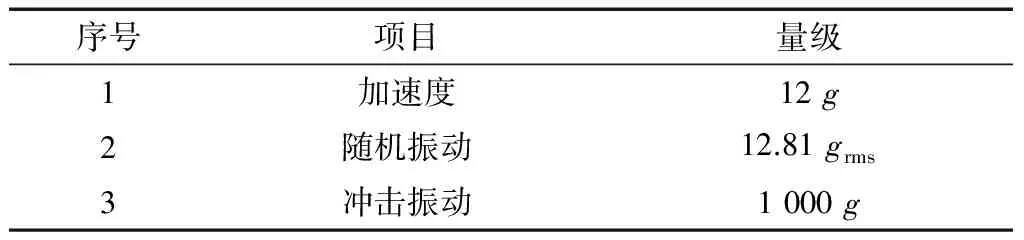
表3 星敏感器力学分析条件Tab.3 The condition of mechanical analysis
为验证含有Bipod结构的星敏感器是否满足强度、刚度要求,通过有限元软件对星敏感器的模态进行仿真分析,得到星敏感器前6阶模态的固有频率如表4所示.
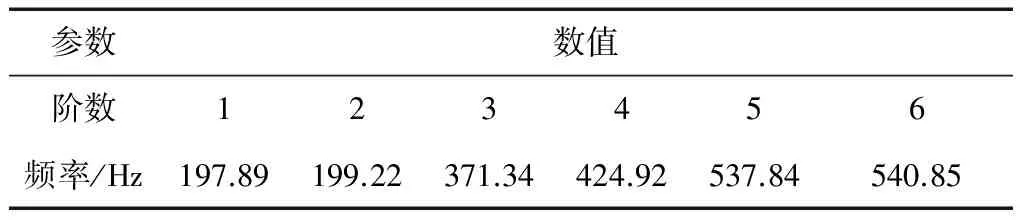
表4 星敏感器前6阶固有频率Tab.4 The 6-order extended natural frequency of the star tracker
由仿真结果可知,1阶固有频率为197.89 Hz,满足航天器中结构基频>100 Hz的要求.满足刚度条件.
在随机响应分析中,星敏感器最大应力(3σ)为512.64 MPa,位于Bipod两脚架上.在冲击响应分析中,星敏感器最大应力为333.53 MPa,同样位于Bipod两脚架上.由于两脚架材料为TC4,其屈服强度为860 MPa,因此星敏感器的强度满足设计要求.
综上,本文所提出的BIPOD支承结构设计方案均能满足强度、刚度条件.
4 结 论
本文为改善星敏感器热稳定性以及光轴指向精度稳定性,提出了一种基于Bipod支撑结构的遮光罩支撑设计方案.通过一系列的仿真分析证明了该方案的有效性.与原方案相比,采用Bipod支撑结构的星敏感器的主体法兰变形显著改善,光轴指向精度的稳定性也有明显提高.且采用Bipod支撑结构的星敏感器也有着较好的强度条件与刚度条件.因此,采用Bipod支撑结构的星敏感器设计方案在满足抗力学环境设计要求之外,还能有效改善其结构热稳定性,并保证星敏感器在轨指向精度的稳定性.
[1] PETROVSKY G T, TOLSTOY M N, LJUBARSKY S V. A 2.7-meter-diameter silicon carbide primary mirror for the SOFIA telescope[R].SPIE, 2199: 263-269, 2006.
[2] 马尧. 空间反射镜组件Bipod柔性元件卸载能力分析[J].航天返回与遥感,2013,34(3):74-80. MAO R. Offloading capacity analysis of bipod flexure in space mirror assembly[J].Spacecraft Recovery & Remote Sensing,2013,34(3):74-80.
[3] 连华东,金建高,宫辉. 空间反射镜Bipod结构设计研究[C]//第23届全国空间探测学术交流会论文摘要集.北京:中国空间科学学会,2010.
[4] CHU C, LI Y, CHAI W, et al. Design of Bipod flexures for space mirror[C]//International Symposium on Photoelectronic Detection and Imaging 2011: Space Exploration Technologies and Applications. Washington D.C.: SPIE, 2011.
[5] HAGYONG K,YANG H S . Design optimization of a 1-m lightweight mirror for a space telescope[J].Optical Engineering, 2013,52(9):091806.
[6] ROELOF W H, BEZOOIJEN V . SIRTF autonomous star tracker[J].IR Spacce Telescopes and Instruments,2014,4850:108-121.
[7] PAUL M, ALISON N, BUCK H. Sensitivity evaluation of mounting optics using elastomer and bipod flexures[J]. Proceedings of SPIE Optomechanics, 2003, 5176: 26-35.
AnOptimalDesignofStarTrackerBaffleBasedonBipodStructure
CHEN Jianfeng, YU Chengwu, CHENG Huiyan, SUI Jie, WU Yanpeng
(BeijingInstituteofControlEngineering,Beijing100094,China)
Star tracker (ST) is a sensor with high accuracy, which is wildly applied to measure the attitude of spacecraft. The accuracy of a ST can be easily influenced by the outer environment, especially by the temperature environment. Since the heat stability is important for the accuracy of ST, an optimal design method for the baffle based on Bipod structure is presented to improve the heat stability. Through FEA simulation, this design is proved to be effective in intensity and rigidity, and greatly improved the heat stability, and enhances the stability of optical axis directing accuracy while the ST is working in orbit.
star tracker; Bipod structure; optimum design
V448
:A
: 1674-1579(2017)04-0068-05
10.3969/j.issn.1674-1579.2017.04.012
2017-04-18
陈建峰(1987—),男,工程师,研究方向为航天器姿态测量;余成武(1978—),男,高级工程师,研究方向为航天器姿态测量;程会艳(1984—),女,高级工程师,研究方向为航天器姿态测量;隋杰(1985—),男,工程师,研究方向为航天器姿态测量;武延鹏(1977—),男,研究员,研究方向为航天器姿态测量.
