星光导航技术现状与发展综述
2017-09-23李春艳孙大开夏梦绮
卢 欣,李春艳,李 晓,孙大开,夏梦绮
(北京控制工程研究所,北京 100090)
星光导航技术现状与发展综述
卢 欣,李春艳,李 晓,孙大开,夏梦绮
(北京控制工程研究所,北京 100090)
对国内外星光导航技术的研究现状和发展过程进行综述和总结,汇总介绍国外几种典型应用平台星敏感器的发展现状.最后阐述星光导航技术面临的问题和未来的发展趋势.
星光导航;星敏感器;技术现状
0 引 言
星光导航系统(又被称为天文导航系统,celestial navigation system,CNS)是以太阳、月亮、恒星等自然天体作为参照物来得到载体位置或姿态的一种导航系统[1].星敏感器是星光导航中最常用的姿态测量器件,它以恒星作为姿态测量的观测目标,能够输出相对于惯性坐标系的姿态四元数,为航天器的姿态控制或星光导航系统提供高精度的姿态信息[2].
星光导航技术作为一种被动、抗干扰能力强的导航手段,可输出飞行器的姿态、航向等信息,并作为平台和惯性测量组合导航系统的重要组成部分,有效提高平台和惯性导航组合导航系统的导航能力及其可靠性,尤其在战时,较GPS和无线电导航手段具备其独特的优越性.星光导航方式具有如下技术特点:1)被动式测量、自主式导航;2)导航及定向精度高,定位精度仅次于GPS;3)抗干扰能力强,可靠性高;4)可同时提供位置和姿态信息;5)导航误差不随时间积累.
1 国外技术现状
美、苏、英、法等国在20世纪80年代前一直将星光导航系统的研制和发展放在重要位置,研制了应用于水面舰艇、潜艇、飞机、导弹、卫星等多平台的系列装备.
星光导航系统的高精度测量能力可同时获得高精度的位置、航向信息,可用于惯性导航系统的误差校正.恒星目标的不可干扰性使得星敏感器在安全性有需求的领域有着极其重要的地位.利用星光导航信息校正惯性导航系统位置和航向的方法,在飞机、船舶等平台上获得了广泛的应用.
俄罗斯和美国注重实效并投巨资进行星光定位系统和星光导航技术的基础理论研究与实验室建设.美国海军天文台天文应用室主任P.M.Janiczek认为,星光导航系统的测星精度可达到1″,定位精度可达到30 m[3],即作为GPS导航系统的辅助替代手段.
星光导航方法是一种被动式自主测量方式,其定位定向误差不随时间的增长而发散,不需要设立陆基台站或向空间发射轨道运动体.它以恒星体为导航信标,不受外界电磁波干扰,具有隐蔽好、安全性和可靠性高等优点.
1.1海基平台
星光导航技术在潜艇和水面舰船上已得到了普遍应用[4].美国和俄罗斯的潜艇、远洋测量船和航空母舰上均装备有星光导航系统.美国研制了SCAR天体跟踪潜望镜,并在北极星潜艇上装备11型天体跟踪潜望镜;法国“胜利”级弹道导弹核潜艇上装有M92光电天文导航潜望镜;原苏联研制了HZH对空导航潜望镜,在G级弹道导弹潜艇上装备了普鲁东综合导航系统.各国舰艇上也采用星光导航设备,包括俄罗斯“德尔塔”级弹道导弹核潜艇、前苏联“台风”级弹道导弹核潜艇、D-l、D-II和D-III级弹道导弹核潜艇,维克托-III,“奥斯卡”级巡航导弹核潜艇,“基辅”号航母,德国212型潜艇及法国“碧水晶”级核潜艇等[5-6].
1964年美国研制并装在大西洋靶场测量船阿诺德将军号上的FAST星体跟踪器,光学口径为400 mm,夜间可测+7.0等星,白天可测+3.0等星,定位精度为180 m,航向精度为20″.美国红宝石测量船上装有NAST(nothrop automatic star tracker)星体跟踪器,采用慢扫描敏感器件,夜间测+3.5等星,白天测+2.5等星,定位精度为250 m.
2006年3月,美国成功研制出可在海平面白天观测的DayStar系统,如图1所示.在午后太阳位于天顶时系统能探测+7.1等星.在有薄云的情况下仍能可靠工作,比DayStar系统体积更小、性能类似的星敏感器系统将在飞机导航系统上得到应用,与惯导系统进行组合并提供高精度导航参数.
1.2机载平台
随着航空六分仪、天文罗盘和星敏感器设备的出现,星光导航技术在飞机平台的应用迅速发展[7-8],如美国的中远程轰炸机[9],C2141A大型运输机,SR271高空侦察机,其中美军B22A远程战略轰炸机上安装的是加州诺思罗普公司研制的NAS226型天文/惯性导航系统,B2轰炸机上安装了NAS227型星光/惯性导航系统,苏联的Tu216、Tu295、Tu2160轰炸机等均使用了星光导航设备.
美国RC-135侦察机系统最初使用的是利顿公司的LN-20框架式星跟踪器.它采用反射式卡塞格林光学系统,视场6′,星点测量精度为1.2″.
2005年,诺格公司被美国空军选中为其RC-135侦察机系列提供30套LN-120G高精度星光导航系统.这是一种可昼夜跟踪星体的GPS增强型星光惯性导航系统,与LN-20星光导航系统相比,LN-120G系统增加了综合全球定位系统,采用了零锁陀螺仪技术、先进的加速度计和新型天体望远镜技术.
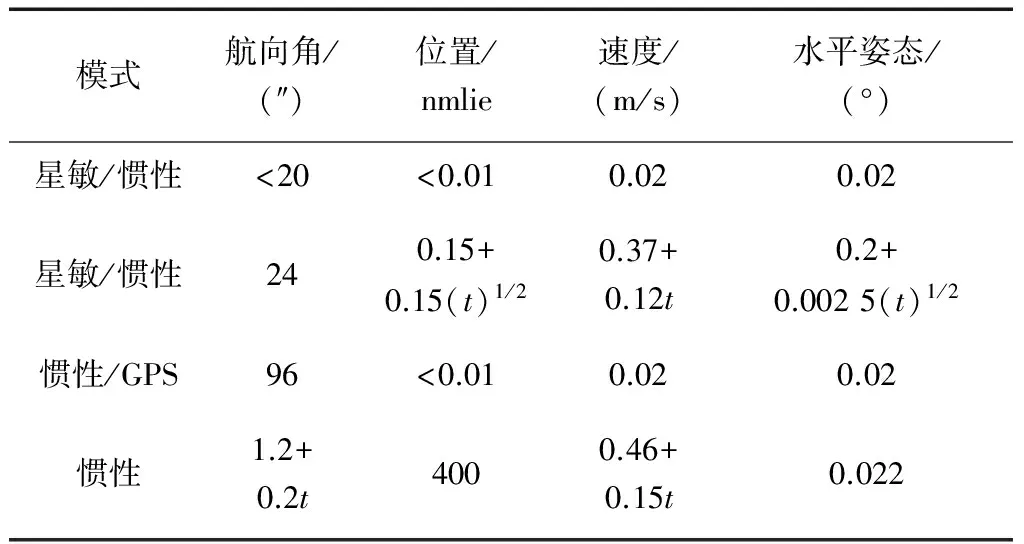
表1 LN-120G组合导航系统性能指标Tab.1 The performance indexes of LN-120G integrated navigation system
1.3弹载平台
1964-1974年期间,前苏联研制的RSM-40潜射导弹首次采用了星光辅助制导技术.其后研制的SS-N-8、SS-N-18III、SS-N-20等都采用了星光辅助制导技术.
美国星光导航设备研究最早开始于Snark地-地洲际导弹.B-2隐形轰炸机使用的星光-惯性制导系统来源于Snark导弹,采用反射式卡塞格林光学系统,视场0.7′,数据更新时间小于1 min[10].
弹载星敏感器一般安装在惯性平台上或安装在可以旋转的框架上.20世纪90年代,借鉴卫星星敏感器的设计经验,Northrop公司开发了用于星光制导的OWLS(opitcal wide-angle lens startracker)星敏感器.它采用捷联式安装,无活动部件,采用全息光学系统,同时在3个指向上具有3°视场.OWLS使用CCD探测器,敏感波段0.6~0.8 μm,在白昼条件下地面可观测到+5等星,测星精度达到1″.
MK6星光-惯性制导系统是由Draper实验室设计集成的,用于Trident IID-5潜射导弹,于1990年服役.MK6是4框架陀螺平台,星敏感器安装在平台上.其光学系统为两片式卡塞格林结构,主镜和次镜使用铍材料,表面镀银,无镜桶结构,直接安装在平台孔中.探测器采用90×90像素CCD器件及半导体致冷器.星敏感器光学系统孔径约51 mm,带有机械快门,遮光罩采用弹簧压紧方式,使用时弹出.
法国Sodern公司为潜射战略导弹M51设计了SED20弹载星敏感器如图4所示.2007年SED20在M45导弹上搭载飞行试验成功,进行了恒星观测试验.
天基平台是星光导航技术的最佳应用环境,国外自20世纪80年代开始研制,以美、德、英、丹麦等国较为突出,至今已有多种产品在卫星、飞船、空间站上得到应用[11-13].
国外星敏感器包括基于CCD和APS两类产品,发展趋势为长寿命(15年以上)、甚高精度(优于1″)[14-15]及高动态性能(15(°)/s~20(°)/s)[16-17],应用范围由中低轨道及高轨道发展至近空间应用,主流产品的性能特点如下,技术指标如表2所示.
1)基于CCD器件,大视场、相对较低的探测星等、较高的数据更新率、中高精度,采用一体化和模块化设计或分体式结构,体积质量小、功耗低.其动态性能是目前国外研制厂商追求的主要技术指标之一.其中,EADS SODERN新近公布的HYDRA 星跟踪器的动态性能尤为突出,可实现无陀螺卫星姿态控制,可确定角速度最高可达10(°)/s,在姿态丢失情况下,可在8(°)/s角速度下完成姿态捕获;10(°)/s角速度和5(°)/s2加速度下数据更新率为30 Hz.
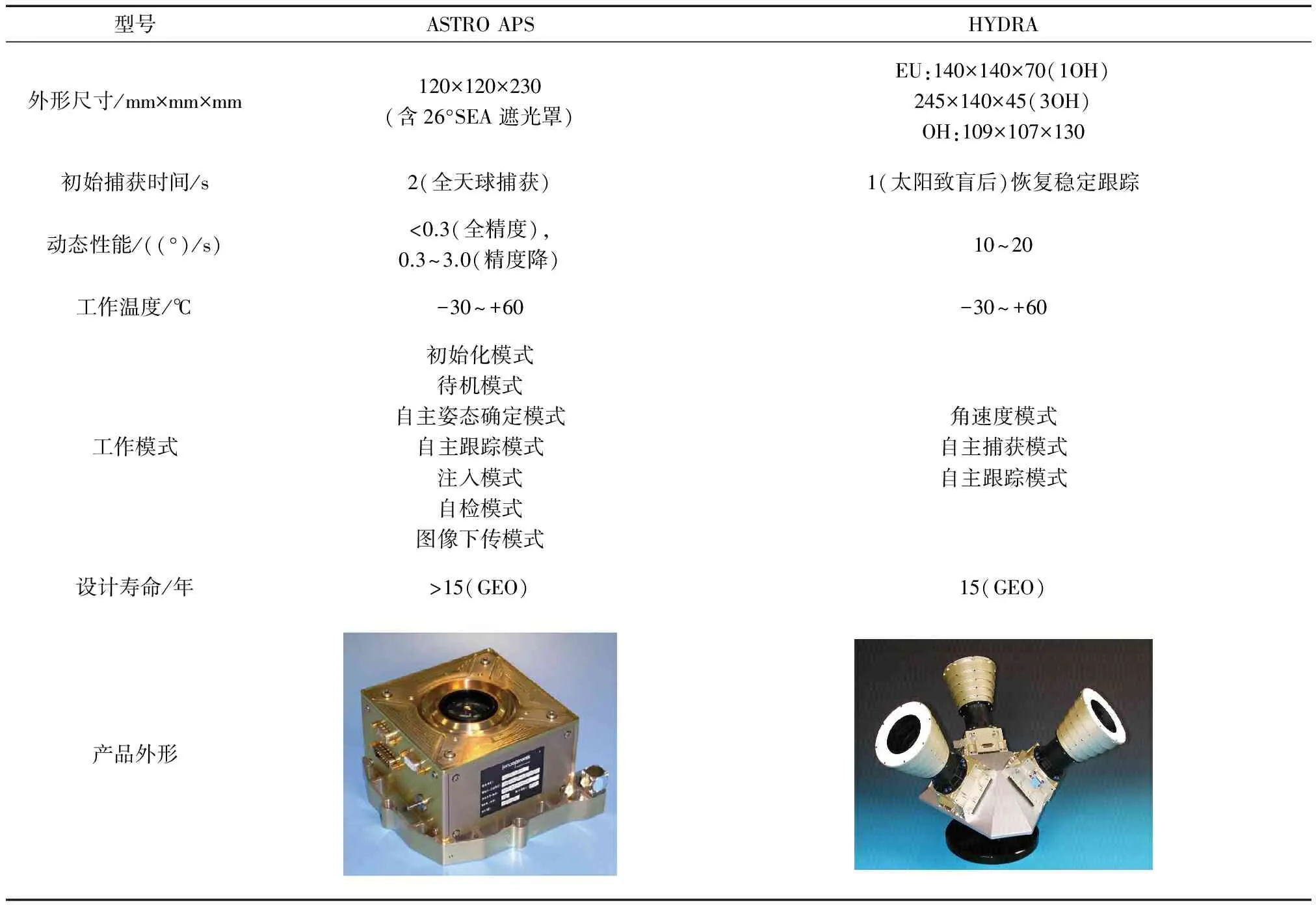
2)基于APS器件,大视场,精度优于2″(1σ),一体化或分体式结构,寿命8~12年,体积和功耗更低[18];基于无陀螺工作模式的多探头、模块化处理器的星敏感器已经得以应用.典型产品德国Jena-Optronik公司的ASTRO APS和法国SODERN公司的 HYDRA.
3)视场较小,基于CCD的甚高精度星敏感器为高精度空间望远镜及高精度控制系统提供了必须的姿态测量手段.
国际上同步开展的还有超高精度星敏感器的研发和应用,典型的产品有洛克西德.马丁公司开发的AST-301自主星跟踪器和法国SODERN 的SED36星敏感器.
1.5其他平台
星相机为一种特殊的星敏感器,常用于科学试验气球的精确定位.通常,试验气球工作的40 km处仍有较为明亮的天空背景.因此,气球用星相机作为自主式姿态敏感器[19-20],仍需解决白天观星问题.气球搭载的大口径亚毫米波望远镜(BLAST)采用一对冗余的星相机实现空中精确定位[20].其白天观星是通过选用大口径长焦距光学系统以及特定波长的红光滤光片,配合1.22 m长的遮光罩的解决方案,保证太阳在任何方向时冗余星相机均可观测恒星.2005年,BLAST在瑞典基律纳成功飞行4天,证实了在典型的白天条件下,照相机可提供绝对精度优于5″,输出频率1 Hz的实时定位.
按照工作安排,试点地区试点期为2012—2014年,下一阶段要完成以下工作:一是要按照试点方案进度安排,确保在2014年年底前完成全部试点工作;二是认真对照已批复的试点方案,逐一梳理工作任务,重点关注进度滞后的工作,查找问题,寻求解决办法;三是对下一阶段工作制定科学合理的工作计划,严格按照试点方案实施进度要求,分层次、分步骤地完成既定任务;四是抓好试点验收环节,研究建立科学合理的验收指标体系,制定完善的验收方案,确保试点工作内容、进度和质量符合试点方案要求。

表2 国外几种典型天基平台星敏感器技术指标Tab.2 The key parameters of many kinds of typical star sensor overseas
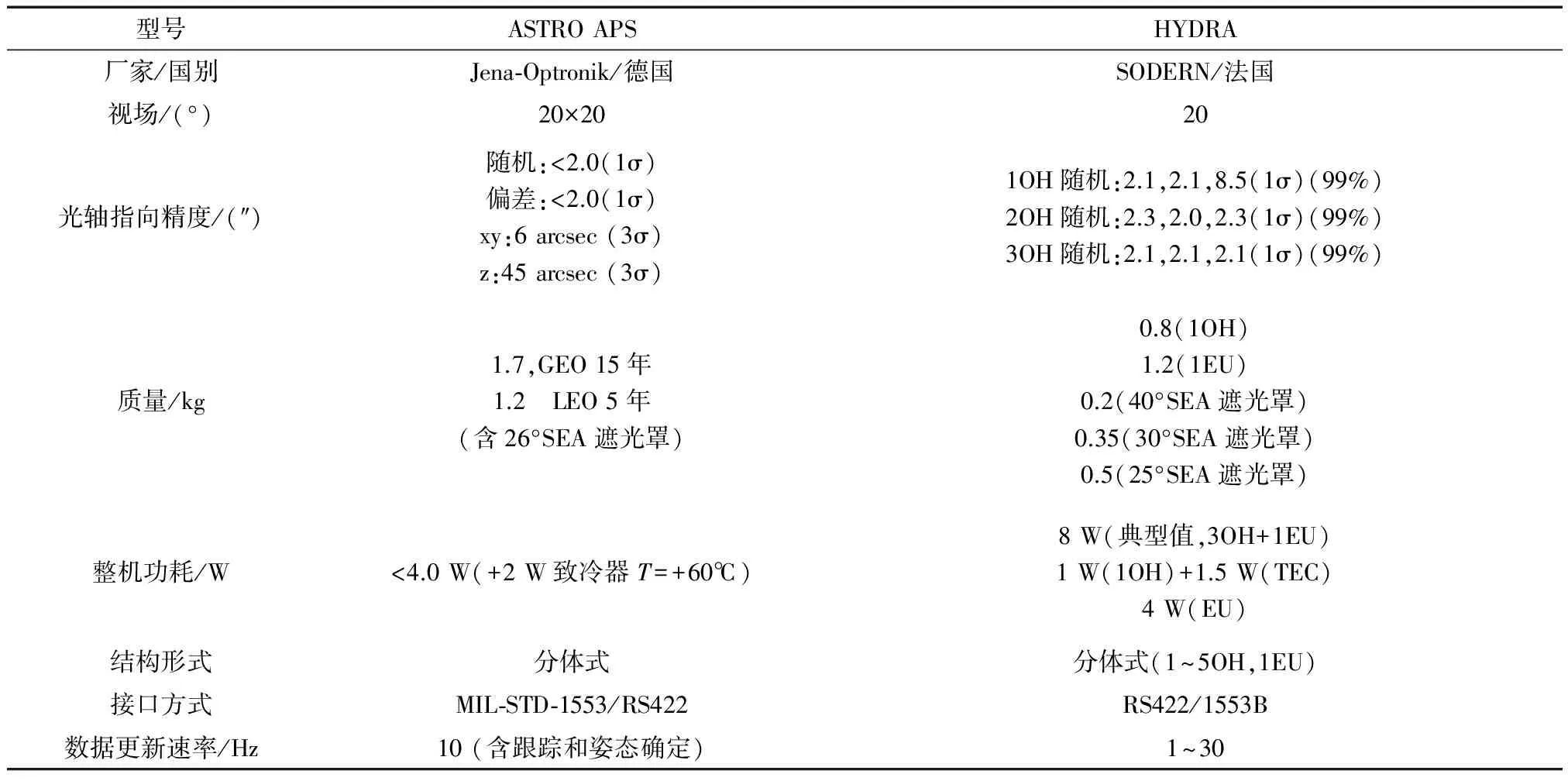
表3 基于APS星敏感器技术指标Tab.3 The key parameters of typical based on APS star sensor overseas
续表
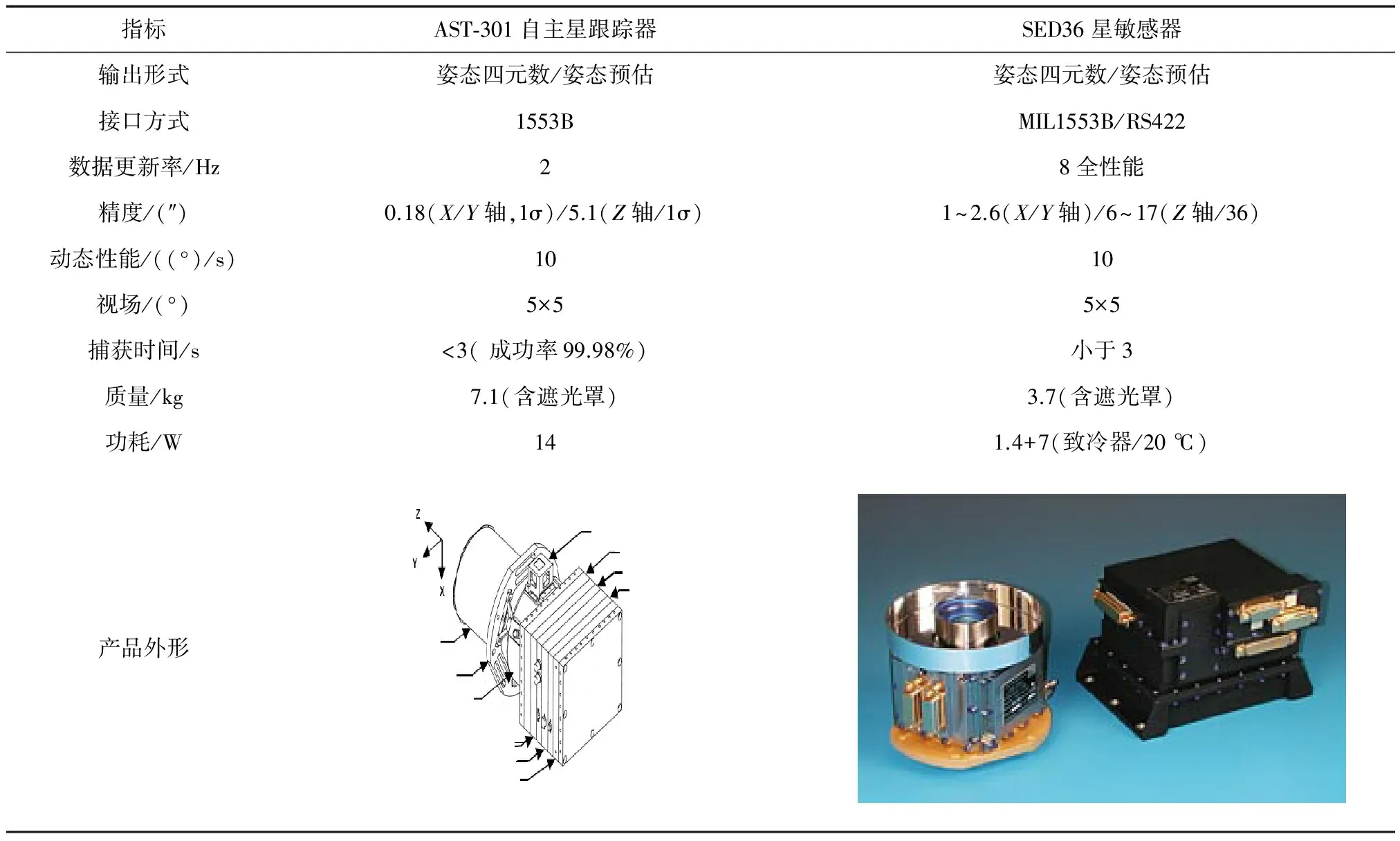
表4 国外典型甚高精度星敏感器技术指标Tab.4 The key parameters of typical very high accuracy star sensor overseas
NASA的Marshall空间飞行器研究中心在20世纪90年代末期为高空气球的定位研制了可在白天工作的星敏感器,如图5所示.其工作高度约为40 km.采用光学滤波使星敏感器在R和I波段(600~1000 nm)工作,在白天最恶劣的情况下可探测+7.8~+8.1等星.仿真数据与实测数据误差约为10%,即使在27 km左右高空背景亮度增大5倍时,仍能观测到较多的恒星.
箭载星敏感器一般应用在火箭上面级,与惯导平台构成姿态确定系统,其实际飞行高度已超过近空间的高度,与卫星等航天器的应用环境类似,因为其应用对象与常规卫星应用有区别,在此将其归入近空间应用一类.美国Wisconsin大学空间天文实验室研制的箭载ST5000星敏感器用于探空火箭与D级卫星上面,已应用于9个探空火箭的飞行,其中后3次飞行对火箭成功进行了姿态控制.ST5000星敏感器由敏感器头部与控制电路两部分组成[21-23],采用分体式结构,其主要性能指标如表5所示.
2 国内技术现状
2.1国内发展现状
中国的星光导航技术总体发展较慢,虽然航天领域星光导航技术发展己经逐步赶上发达国家技术水平,但在近地星光导航技术方面,与发达国家相比技术相对落后.
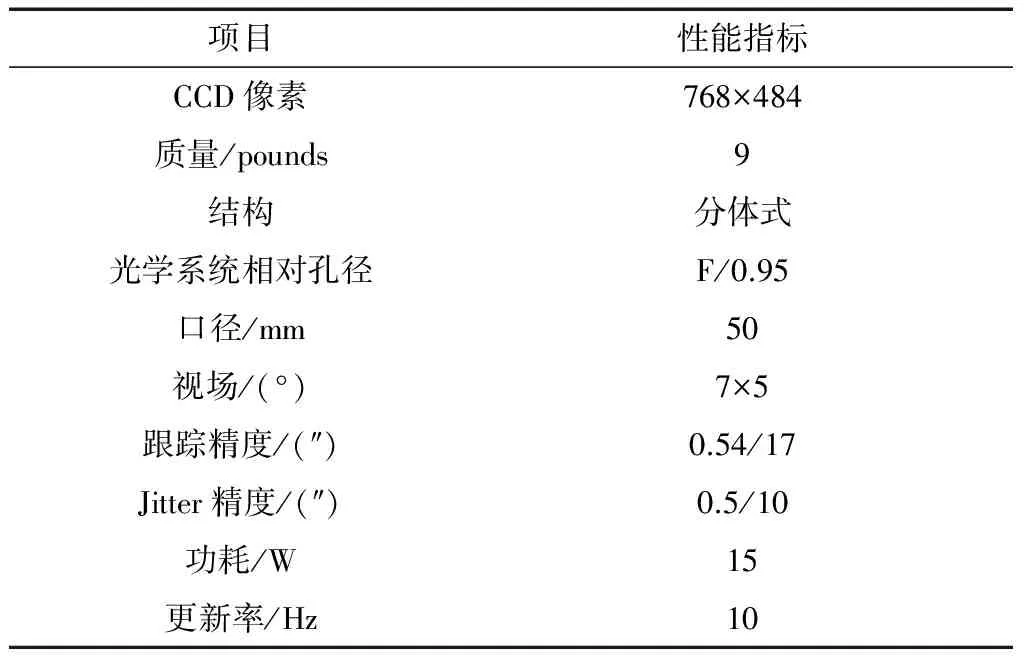
表5 ST5000星敏感器性能指标Tab.5 The performance indexes of ST5000 star tracker
近几十年来,我国开展近地星光导航技术研究,先后研制出多种星光导航设备,可以进行昼夜工作,白天观测太阳,夜间观测星体,定位精度和航向精度相对较高,这些设备自动化程度高,可直接输出载体相对于惯性坐标系之间的相对姿态信息.随着半导体技术的应用的成熟,我国在开发星敏感器技术上有了长足的发展,先后研制出了昼夜均可以观测星体的星敏感器,并且观测精度相对较高,达到了国外同类产品技术水平.随着我国军事技术及需求的快速发展,星敏感器已经成为国内各种武器装备平台及系统的基本配置之一.但相对于国外同类产品的先进水平,国内星光导航系统在全天时全天候测星能力、星光/惯性组合导航精度、动态性能、数据更新率、可靠性和寿命方面还有差距,且国产星敏感器质量和功耗较大.
2.2国内外发展现状对比
国内外星敏感器主要技术指标的对比情况如表6~10所示.
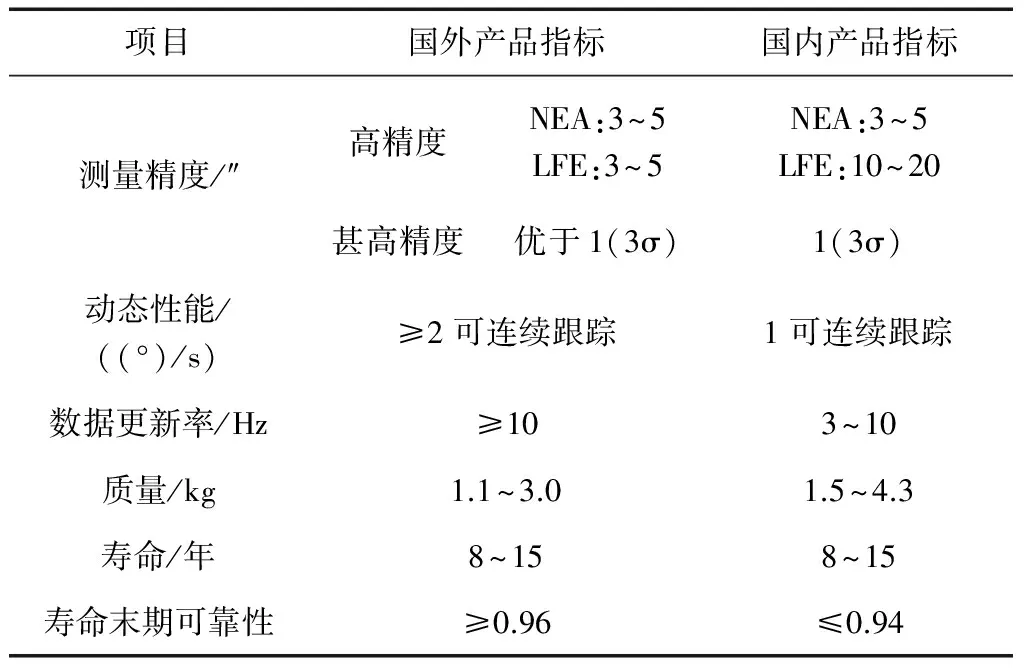
表6 国内外星敏感器主要技术指标Tab.6 The key parameters of star sensor used for outer space between domestic and foreign
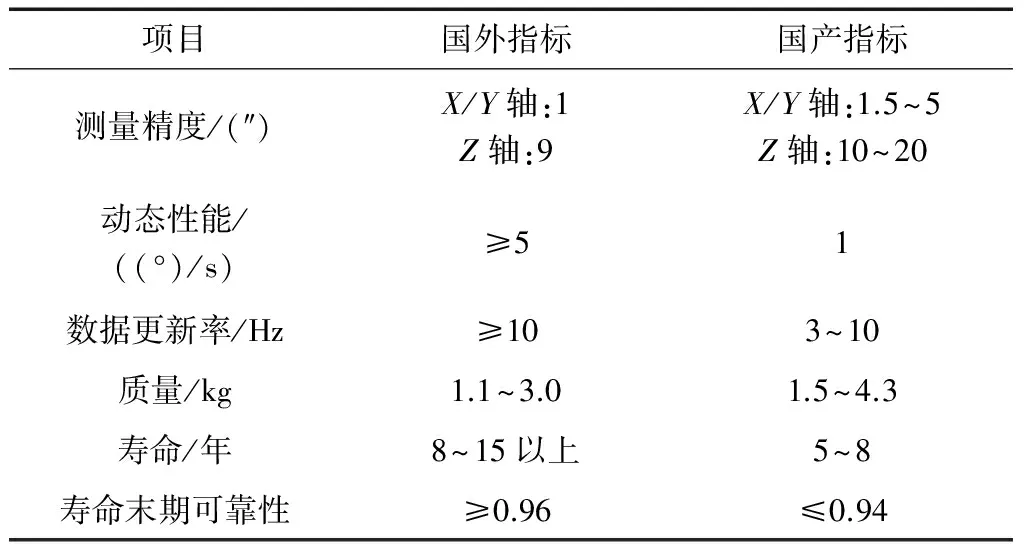
表7 国内外弹载星敏感器主要技术指标Tab.7 The key parameters of star sensor used for missile between domestic and foreign
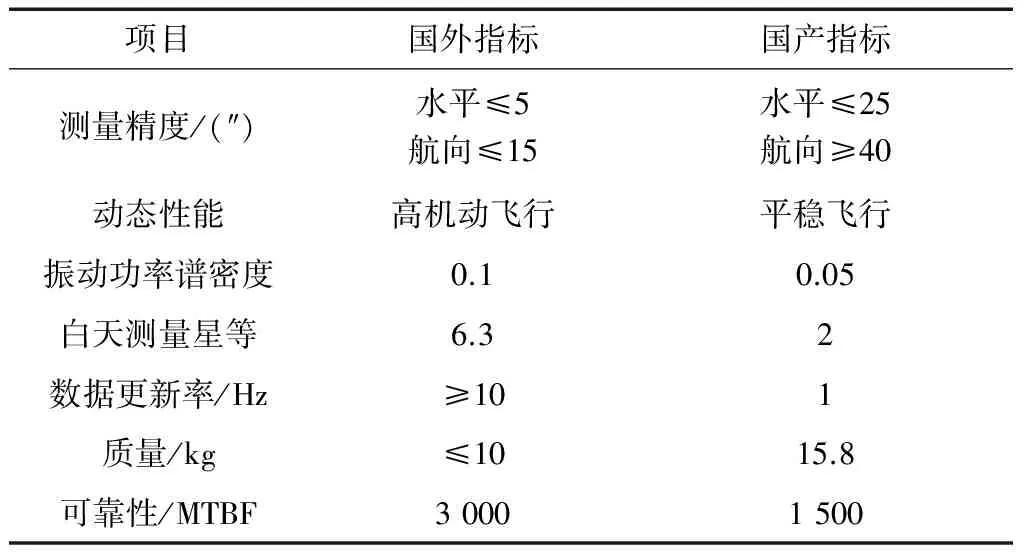
表8 国内外机载星敏感器主要技术指标Tab.8 The key parameters of star sensor used for plane between domestic and foreign
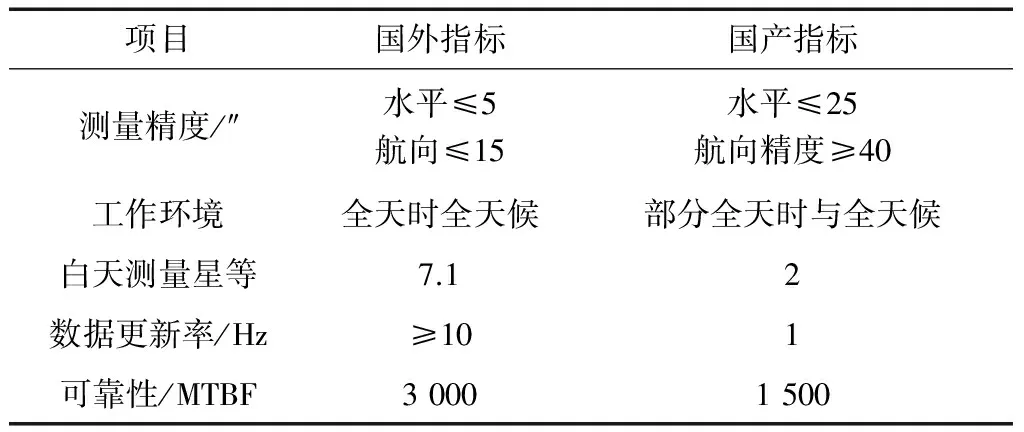
表9 国内舰载/潜载星敏感器主要技术指标Tab.9 The key parameters of star sensor used for naval vessel/submarine between domestic and foreign

表10 国内外星光导航系统主要技术指标Tab.10 The key parameters of starlight navigation systems between domestic and foreign
从表6~10可以看出,相对于国外同类产品的先进水平,国产舰载/潜载星敏感器在全天时全天候测星能力、天文/惯性组合导航精度、动态性能、数据更新率、可靠性和寿命方面还有差距,且国产星敏感器质量较大、功耗偏大.
3 发展趋势及研究方向
从国内外研究现状可以看出,星光导航技术的应用领域逐渐扩大,从一般的航海六分仪到自主星敏感器、水下专用的星光导航潜望远镜定位系统、航空航天领域中的飞机导弹定位系统发展到卫星与航天飞机的惯性/星光组合导航系统,高精度、低成本、小型化、全自主、全天候的星光导航系统是今后发展趋势.
1)采用星光/惯性深组合技术,提高组合导航或制导精度.将星光导航技术与惯性导航、卫星导航等技术融合,形成综合导航系统,以满足海基平台、机载平台、弹载平台等高精度导航和武器精确打击的需求.
2)无基准信息的全自主星光导航技术.星光自主导航属于导航技术的重要发展方向,研究高精度大气折射模型,使新一代星敏感器具有自主导航能力,并具有定姿、定位的功能.通过提高星光导航系统的自动化程度、可靠性与导航数据更新率,开展利用星光折射/星光色散原理获得高精度基准信息的全自主星光导航技术及工程化研究.
3)提高星光导航的泛平台适应性及全天候测星能力.发展高灵敏度射电探测传感器,研制和装备更高精度射电星敏感器,满足惯导全天候校正需求.发展短波红外星体跟踪技术,与可见光测星技术集成,使星敏感器具有多波段测星能力,实现全天候高精度导航.提高星敏感器白天测星能力,从而提高设备导航的可用度和精度,并将此类技术扩展到新的应用平台.
4)提高星光导航设备精度,减小星光导航设备体积、重量.满足高空高速巡航导弹或超音速飞机等武器平台对高性能星光导航设备的需求,除实现较高导航精度,系统可靠性和小型化、更高的数据更新率也是高性能星光导航系统的重要发展方向.
4 结 论
星光导航作为一种被动、抗干扰能力强的导航手段,可有效提高平台和惯导组合导航系统的导航能力及其可靠性,实现自主导航.中国星光导航技术虽起步较晚,但技术水平提升较快,通过研制自主星光导航系统,开展持久可靠星光自主导航技术研究,可提升航空、航天、武器装备等平台的自主导航能力,为构建中国的空间自主导航体系提供技术支撑.
[1] LIEBE C C. Star trackers for attitude determination[J]. IEEE Transactions on Aerospace and Electronic Systems Magazine, 1995, 10(6): 10-16.
[2] ALEXANDER C D. Design of a day/night star camera system[J]. Proceedings of SPIE, 1999,3779:47-54.
[3] ROELOF W H, VAN B. Sirtf autonomous star tracker[J]. Proceedings of SPIE, 2003, 4850: 108-121.
[4] LEVINE S, NADEAU F, MILLER R. Autonomous stellar angular reference systems (stars) for hypervelocity startegic systems and space based interceptors[C]//Position Location and Navigation Symposium. New York: IEEE, 1992.
[5] ATKINSON D, AGNEW J, MILLER M. The B-2 Navigation system[C]//Aerospace and Electronics Conference. New York: IEEE, 1993: 345-354.
[6] KURT L D, BRIAN D R. Daytime aspect camera for balloon altitudes[J]. Optical Engineering, 2002,41(10):2641-2651.
[7] LIEBE C C, GROMOV K, MELLER D M. Toward a stellar gyroscope for spacecraft attitude determination[J]. Journal of Guidance, Control and Dynamics, 2004, 27(1): 91-99.
[8] JEFFREY W P, KENNETH H N, KURT P J.The ST5000: a high-precision star tracker and attitude determination system[C]//Space Teleseopes and Instrumentation 2008: Optical, Infraved, and Millimeters. Washington D.C.: SPIE, 7010,70104H-1-70104H-6.
[9] PERCIVAL N, The ST5000: an attitude determination system with low-bandwidth digital imaging[C]//Astronomical Data Analysis Software and System(ADASS),2001.
[10] GLENN J K. Stellar augmented inertial guidance for ballistic missiles[C]//IEEE Transactions on Military Electronics. New York: IEEE, 1963.
[11] ENRIGHT J, SINCLAIR D, GRANT C, et al. Towards star tracker only attitude estimation[C]//Small Satellite Conference, 2010.
[12] LAI Y, LIU J, DING Y, et al. Precession-nutation correction for star tracker attitude measurement of STECE satellite[J]. Chinese Journal of Aeronautics, 2014, 27(1): 117-123.
[13] A.HARRISON S. A versatile stellar-referenced inertial platform[C]//IEEE Transactions on Aerospace And Electronic Systems. New York: IEEE, 1966, 2(6): 497- 492.
[14] EISENMAN A R, LIEBE C C, JRGENSEN J L. Astronomical performance of the engineering model advanced stellar compass[J]. Proceedings of SPIE, 1996, 2810: 252-262.
[15] YOUNG E F, MELLON R, PERCIVAL J, et al. Sub-arcsecond performance of the ST5000 star tracker on a balloon-borne platform[C]//Aerospace Conference. New York: IEEE, 2012: 1-7.
[16] CRASSIDIS J. L. Angular velocity determination directly from star tracker measurements[J]. Journal of Guidance, Control and Dynamics, 2002, 25: 1165-1168.
[17] DAN M, JAMES S. New ball aerospace star tracker achieves high tracking accuracy for a moving star field[J]. Proceedings of SPIE, 2004(5430): 43-52.
[18] MICHAELS D L, SPEED J F. New ball aerospace star tracker achieves high tracking accuracy for a moving star field[C]//Acquisition, Tracking, and Pointing XVIII. Washington D.C.: SPIE, 2004, 43-52.
[19] LIEBE C C. Accuracy performance of star trackers-a tutorial[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38: 587-599.
[20] ROELOF W H, VAN BEZOOIJEN. Sirtf autonomous star tracker[J]//Proceedings of SPIE, 2003(4850): 108-121.
[21] LAWRENCE W C. The HDOS HD-1003 star tracker[J]//Proceedings of SPIE, 1995(2466): 93-95.
[22] SCHMIDT U. Autonomous star tracker based on active pixel sensors(APS)[C]// Proceedings of the 5thInternational Conference on Space Optics. Toulouse, 2004: 355-358.
[23] CARL C L, LEON A, GEORGE D, et al. Micro APS based star tracker[C]//Aerospace Conference. New York: IEEE, 2002.
CurrentSituationandDevelopmentTrendsofStarlightNavigationTechnology
LU Xin, LI Chunyan, LI Xiao, SUN Dakai, XIA Mengqi
(BeijingInstituteofControlEngineering,Beijing100090,China)
The research situation and progress of starlight navigation are analyzed. The current situation of many kinds of typical star sensor overseas are collected and presented. At last, the current problem and development trends of starlight navigation are introduced.
starlight navigation; star sensor; current situation
V448.2
:A
: 1674-1579(2017)04-0001-08
10.3969/j.issn.1674-1579.2017.04.001
2017-05-08
卢欣(1961—),男,研究员,研究方向为空间光学敏感器;李春艳(1977—),女,高级工程师,研究方向为光学成像敏感器;李晓(1984—),男,高级工程师,研究方向为飞机平台星敏感器技术;孙大开(1984—),男,高级工程师,研究方向为舰载星敏感器技术;夏梦绮(1993—)女,硕士研究生,研究方向为近空间星光导航算法.
