弹载捷联星敏感器强光规避策略及算法
2017-09-23王海涌王腾飞钟红军王可东
王海涌,王腾飞,钟红军,王可东
(1.北京航空航天大学宇航学院,北京 100191; 2.北京控制工程研究所,北京 100090)
弹载捷联星敏感器强光规避策略及算法
王海涌1,王腾飞1,钟红军2,王可东1
(1.北京航空航天大学宇航学院,北京 100191; 2.北京控制工程研究所,北京 100090)
星敏感器光学系统及成像阵列易受太阳和月亮强光干扰.针对弹载捷联星敏感器提出一种规避强光的解析几何方法.通过天文公式解算出观星时刻太阳、月亮矢量,将其转换到当地地理坐标系下;将太阳、月亮方位、地心指向和星敏感器圆视场的几何分布关系划分为3种类型,并结合星敏感器遮光罩太阳月亮规避角参数,分别建立矢量公式求解星敏感器光轴的指令指向;利用STK仿真软件进行算法验证,选择任意时间段并设定星敏感器光轴指向,经本算法解算的光轴指令指向均可成功规避太阳月亮和地平.该算法可实现星敏感器光学系统的自主保护、观星窗口的选择,可以通过姿态机动实现太阳和月亮的规避和有效星光观测.
星敏感器;光学系统;遮光罩;规避角;姿态机动
0 引 言
星敏感器通过观测恒星星光实现自主姿态确定[1].太阳星等为-26.76 Mv,月亮星等为-12.6 Mv,而星光是弱光,通常星敏感器探测恒星星等为0~8 Mv[2],太阳的照度相当于5 Mv星的 1 012 倍,针对星光所设计的光学成像系统不适应太阳、月亮强光.当太阳光聚焦在像面阵列,长时凝视可能会烧毁像素,当月亮进入视场成像,会导致灰度饱和,也是一种强光干扰.此外,太阳或月亮临近星敏感器规避角时,会对整个成像平面带来杂光干扰[2-4].对于安置于伺服稳定平台的星敏感器,或飞行器本体允许姿态机动的捷联星敏感器,在飞行器已具有粗略位姿信息的前提下,对于初次观星或后续每次观星窗口的开启,可以预先采取强光规避策略,控制星敏感器光轴自动躲避太阳,以保护星敏感器光学系统.
1 坐标系定义
(1)赤道惯性坐标系OXiYiZi
坐标原点在地心,OZi轴垂直于赤道平面指向地球北极,OXi指向春分点,OYi轴与OXi轴和OZi轴构成右手直角坐标系.
(2)航天器轨道坐标系OXoYoZo
坐标原点在航天器质心,OZo轴指向地心,OXo轴在轨道平面内垂直于OZo指向航天器运动方向,OYo轴与OXo轴和OZo轴构成右手直角坐标系.
(3)航天器本体坐标系OXbYbZb
航天器本体坐标系与航天器固连,OXb、OYb、OZb轴分别被称为航天器的滚动轴、俯仰轴、偏航轴.当航天器在零姿态时,卫星本体坐标系与卫星轨道坐标系重合.
(4)星敏感器测量坐标系OXsYsZs
坐标原点为光轴与CCD平面焦点,OXs轴在CCD平面上,指向水平扫面像素序号增大方向,OZs轴垂直于星敏感器平面并沿光轴方向指向外,OYs轴与OXs轴和OZs轴构成右手直角坐标系,如图1所示.
2 日月单位矢量和坐标变换
太阳的黄经黄纬(λs,βs)和月亮的黄经和黄纬(λm,βm)由天文公式解算获得[5].在观测时刻,日月单位矢量坐标在地心黄道坐标系下表示为:
(1)
获得黄赤交角ε后,地心黄道坐标系和地心赤道直角坐标系(i系)的转移矩阵则为绕X轴的基元旋转矩阵
(2)
那么,在i系下,太阳月亮单位矢量分别计算如下:
(3)
将太阳月亮矢量继续表达为轨道坐标系(o系)下的坐标:
(4)
式中,Coi是i系到o系的姿态转换矩阵,在轨导航计算机可以实时生成该矩阵数据.
最后星敏感器光轴指向矢量也需转换到轨道坐标系o系下.假定星敏感器以捷联方式安装于飞行器本体,比如导弹,星敏感器和导弹本体存在一个安装矩阵Cbs.星敏感器测量坐标系的Z轴沿光轴,则测量坐标系系光轴矢量坐标
Bs=[0 0 1]T
(5)
在o系下的光轴矢量坐标:
Bo=CobCbsBs
(6)
式中,Cob就是从飞行器本体到o系的姿态转移矩阵,其初始粗略值由惯性测量单元的三轴陀螺测量值解算获得[6].
3 强光规避数学模型及策略
太阳规避角定义为以星敏感器光轴为旋转轴的某一圆锥角范围,当太阳目标进入太阳规避角范围内,杂光干扰将导致观测失效.为了便于分析,采用一个等价视角,认为有一个圆锥以太阳方位为对称轴,其锥角值等于太阳规避角,当星敏感器光轴进入太阳规避锥内,导致观测无效.对于月亮规避角采用同样的视角进行分析.
图2展示了一个通常的例子,在轨道坐标系o系下分布有4个矢量:太阳矢量So、月亮矢量Mo、地心矢量Eo和星敏感器光轴矢量Bo.填充阴影的圆代表了测者地平,轨道坐标系的Xo和Yo轴位于其上,第3轴Zo与地心矢量方向Eo重合.太阳规避角为εsun、月亮规避角为εmoon、星敏感器圆视场FOV以及光轴天顶距σb太阳天顶距σsun月亮天顶距σmoon.
建立星敏感器强光规避策略,就是避免星敏感器视轴进入太阳或月亮规避锥.在长期轨道运行过程中,地球、太阳、月亮具有固有的天体运动及空间布局,再加上星敏感器光轴,4个矢量的几何分布有多种.所有分布情形划分成3个基本类型,强光规避算法及策略将围绕这3个基本类型以及类型所属的具体情形分别建立.
3.1类型Ⅰ:太阳月亮位于测者地平之下的规避策略
若太阳和月亮都位于测者地平之下,如图3所示,星敏感器光轴允许的指向范围为红色虚线标示的圆锥体,其半锥角取(90°-εsun/2),因为当太阳恰位于测者地平的边界情形时,规避角将跨越地平之上和之下各εsun/2.

(7)
3.2类型Ⅱ:太阳和月亮两者之一位于测者地平之上
(1)只有太阳位于测者地平之上
再细分为2种子情形:
① 太阳天顶距为[0°,δ]
这里δ是一个小角度值,比如3°或5°,也就是太阳临近于天顶太阳规避锥覆盖天顶周围大部的情形.那么星敏感器需要远离天顶周围,考虑边界条件,光轴天顶距σb范围设定为[εsun/2+δ,90°-FOV/2],如图4所示. 满足如下关系式:
(9)
式中,地心矢量Eo=[0 0 1].
② 太阳天顶距为[δ, 90°]
该情形下太阳矢量远离天顶,如图5所示,可以令光轴矢量位于地心矢量和太阳矢量所构成的平面内,即三矢量共面,混合积为0,即方程组(12)的第2个方程.显然在该平面内光轴越远离太阳,规避效果越好.数学关系符合如式(9)所示,式(9)中的第3个和第4个约束关系式可以确保星敏感器光轴远离太阳矢量,而不是夹在太阳矢量和地心矢量之间.最后,光轴天顶距σb的允许变化范围是[εsun/2-δ,90°-FOV/2].
(9)
式中光轴天顶距σb在允许变化范围是[εsun/2-δ,90°-FOV/2]选定一个值,方程组(9)的解就可以作为下一步姿态机动控制的指令值.
(2)只有月亮位于测者地平之上的情形
可以参考如上①和②两种子情形的分析方法建立数学模型,方法基本相同.
3.3类型Ⅲ:太阳和月亮均位于测者地平之上
(1)月亮规避锥嵌入于太阳规避锥之内
该情形下月亮规避锥整体嵌入在太阳规避锥之内,如图6所示,数学特征是太阳矢量和月亮矢量夹角小于εsun-εmoon.问题简化为可以只考虑外边的太阳规避锥,处理方法则与3.1所述完全相同.
(2)月亮规避锥没有嵌套在太阳规避锥之内
该情形下,两个规避锥不存在嵌套的关系,则需要同时规避太阳和月亮.数学特征是太阳-月亮角距大于εsun-εmoon,如图7所示.太阳和月亮2个矢量构成平面Π,可以令光轴指令指向沿着平面Π的法向,而且保持位于地平之上,建立如下关系式:
Bo=So×Mo
(10)
还需要进行如下判断:光轴矢量Bo和Eo夹角如果小于 90°(BoEo<0), 就说明Bo位于地平之下了,那么取Bo的反向矢量必然位于地平之上,作为光轴矢量即可.
(3)光轴指令指向临近地平
该特殊情形指的是,虽然可以同时规避了日月强光,但光轴指令指向过于临近地平,容易招致受到地气光的干扰.所以,应该指定一个安全的高度角h,以规避地气光,要求光轴被抬高h后,应该依然保持与平面Π的法向矢量Π和地心矢量Eo共面.符合如下关系式:
(11)
式中Π是平面Π的法矢量,第3个方程关系式可以保障光轴始终位于地平之上.
4 STK仿真实例及分析
4.1仿真环境设计
“全导式”弹道导弹具有姿态和轨道机动能力,为捷联星敏感器提供了规避太阳和月亮强光的姿态机动条件及可行性.伺服平台安装的星上星敏感器也可以实现光轴指向的控制.
仿真生成一个地球低轨卫星轨道,卫星本体坐标系与轨道坐标系重合[7],星敏感器捷联安装,光轴始终朝向天顶.轨道六要素设定为:a=6 646.27 km,e=1.8×10-5,i=23.26°,f=0°,ω=0°,Ω=0°.轨道面为黄道面(轨道倾角i=23.26°)在该轨道运行过程中星敏感器视场有更多机会受到太阳光和月亮光的干扰[8].
图9中展示了一个STK测试中视场方向、太阳月亮方位及地心的矢量分布图,卫星姿态的初始值设定为:[0 0 0]°,视场是15°×15°,其外接圆测量范围如图9中黄色图案.
设定太阳规避角εsun为60°,月亮规避角εmoon为25°.当光轴-太阳角距大于30°(εsun/2),同时光轴-月亮角距大于12.5°(εmoon/2)时,意味着星敏感器不会被太阳月亮强光干扰,观测是有效的.令规避算法涉及的参数δ等于5°,h等于20°.
4.2仿真结果
从00:00:00到04:00:00 10 Jan 2011时段,星敏感器视场仅受月光的干扰,如图10(a)的蓝色虚线2所示,适用于3.2(2)小节所述的规避算法,规避结果(蓝色实线线段4)月亮-光轴角距大于εmoon/2,表明星敏感器光轴指令指向远离了月亮规避锥.同时连带了太阳-光轴角距变化(红色实线线段所示),它是被动调整的.
从00:00:00到04:00:00 1 Feb 2011时段,蓝色虚线2和红色虚线1表明了太阳和月亮同时闯入了太阳规避锥和月亮规避锥范围,采用3.3(2)所述规避算法,令观测指令指向为太阳月亮矢量所构成平面的法向,因而在图10(b)中看到一个幅度为90°的半方波(红实线线段3和蓝实线线段4重合).
从00:00:00到04:00:00 14 Feb 2011时段,符合3.1所述情形,太阳-光轴角距和月亮-光轴角距都符合规避要求,不再需要任何姿态机动,如图10(c)所示,没有生成任何指令姿态.
从00:00:00到04:00:00 15 Sep 2011时段,符合3.2(1)②所述情形,所需要考虑的只是太阳,算法生成的光轴指向成功规避了太阳光,同时导致了月亮-光轴角距的随动变化,如图10(d)所示,角距仍远大于月亮规避角.
挑选12个轨道时刻,强光干扰情况和规避效果,如表1所示.
只要太阳-光轴角距小于30° (εsun/2) 或月亮-光轴角距小于12.5° (εmoon/2),就说明有强光干扰,经过规避算法生成光轴指令指向,表1中的α′、β′值均满足大于太阳月亮半规避角值,强光规避成功.
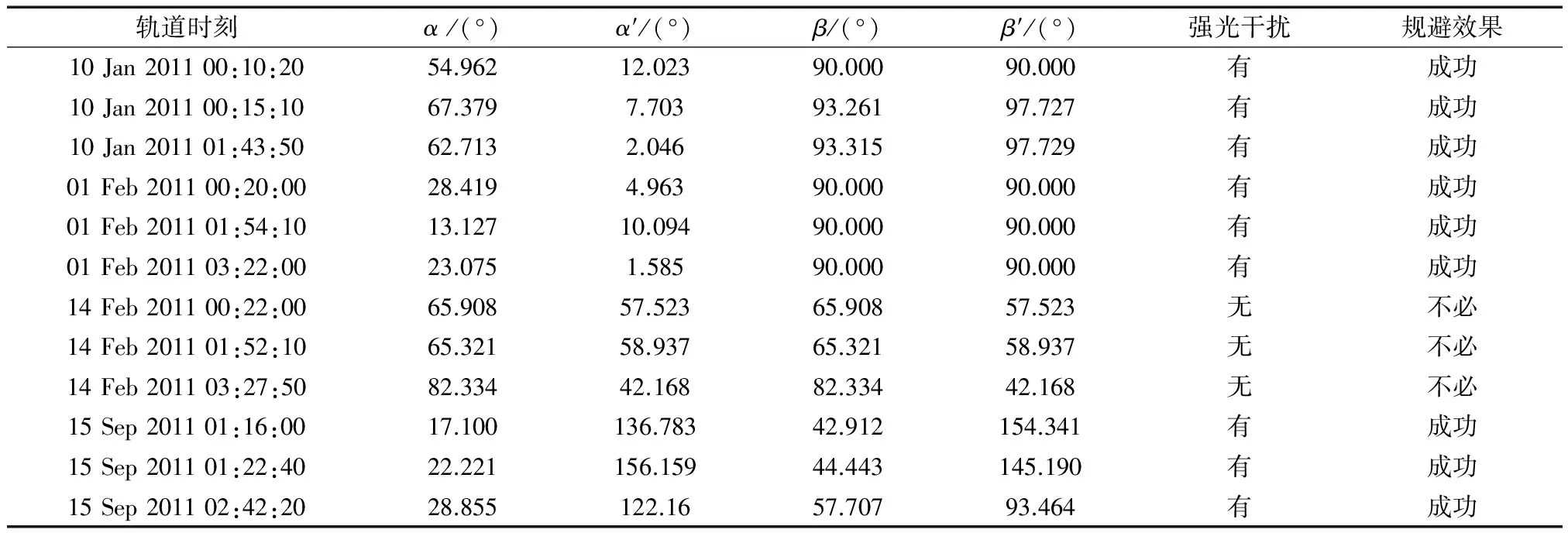
表1 光轴当前指向、指令指向及规避效果Tab.1 The current boresight orientations, the command ones and the evasion results
注:α、β分别代表太阳-光轴夹角和月亮-光轴夹角;α’,β’则分别代表生成规避指令的太阳-光轴夹角和月亮-光轴夹角.
5 结 论
通过对星敏感器光轴、太阳矢量、月亮矢量和地心矢量空间几何分布的全面分析,建立了强光规避策略和算法,从而确保星光观测的有效性.首先,通过天文公式和观测时间获取太阳和月亮的矢量并进行坐标转换;然后将矢量空间几何分布划分为3大类型,针对每个类型下具体分布情形均建立了矢量公式,计算出星敏感器光轴的指令指向;最后基于STK工具进行了仿真验证,结果表明光轴指令指向可以成功实现强光及地平的规避.
本算法思想由具体工程需求触发而产生,存在局限性,比如捷联载体须具有姿态机动能力,或者星敏感器安装于伺服平台上.不过考虑到强光干扰是星敏感器领域的一个普遍的问题,本算法的基本思想尤其是矢量公式的构建,对于其它工程应用仍然具有理论指导意义和参考价值.
[1] HUFFMAN K M, SEDWICK R J, STAFFORD J, et al. Designing star trackers to meet micro-satellite requirements[C]//SpaceOps 2006 Conference-9thInternational Conference on Space Operations. Rome, 2006.
[2] MARTIN M, JOHN E. Validating microsatellite star tracker baffle tests[C]//AIAA/AAS Astrodynamics Specialist Conference. Washington D.C.: AIAA, 2014.
[3] 梁士通,钟红军,刘婧. 一种高精度星敏感器用遮光罩[J]. 空间控制技术与应用, 2016,42(2): 53-56. LIANG S T,ZHONG H J,LIU J.Improved baffle used for star sensor[J].Aerospace Control and Application,2016,42(2): 53-56.
[4] ZHAO L, SU Z H, HAO Y. The star sensor layout based on geometric position analysis[C]//IEEE International Conference on Automation and Logistics, ICAL. New York: IEEE, 2012.
[5] JEAN M, WILLMANN, B. Astronomical Algorithms[M].1stediton.,1991.
[6] WERT J R.Spacecraft attitude determination and control[M]. Astrophysics and Space Science Library, Volume 73, 2002:764.
[7] Analytical Graphics Inc(AGI). STK User’s Manual, Version 5.0.1, 2002.
[8] SCHMIDT U, ELSTNER C, MICHEL K. ASTRO 15 star tracker flight experience and further improvements towards the ASTRO APS star tracker[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Washington D.C.: AIAA, 2008.
StrategyandAlgorithmonEvasionofSunlightandMoonlightforMissile-BorneStrapdownStarTracker
WANG Haiyong1, WANG Tengfei1, ZHONG Hongjun2, WANG Kedong1
(1.SchoolofAstronautics,BeihangUniversity,Beijing100191,China;2.BeijingInstituteofControlEngineering,Beijing100090,China)
Attitude determination of star tracker is executed by observing star light, which is rather weak, the optics and the imaging array are not applicative to the sun and the moon, the two strong light sources in the space, so a geometrical analytic method is put forward for star tracker to evade strong light sources. First, the sun and moon direction vectors at the observing time are calculated according to the astronomical equations and converted to the local geographic coordinate system. Then, the geometrical relationships among the direction vectors of the sun, the moon the geocenter and the conical FOV of star tracker are divided into 3 classes totally, combined with the exclusive angle parameters of the sunlight and of the moonlight designed for the baffle, the vectorial equations are built for each case to solve the command boresight orientation to direct the following attitude maneuver. Finally, the algorithm verification is carried out using STK (Satellite Tool Kit). The simulation environment is set up by selecting a spell of time and settling the boresight orientation of the star tracker, to conduct a scenario that has more chances for the Sun and the Moon lights interfering into the star tracker FOV or the baffle. After many times of tests, the commanded orientation of the boresight by the algorithm always succeeds in evading the sun, the moon and the horizon plane. This method can conduct protecting of the optics of the star tracker autonomously, selection of star observation window, and can carry out the valid starlight observation by the evasion of the Sun and the moon through attitude maneuver.
star tracker; optics; baffle; exclusive angle; attitude maneuver
V1
:A
: 1674-1579(2017)04-0019-06
10.3969/j.issn.1674-1579.2017.04.003
2017-04-18
王海涌(1969—),男,讲师,研究方向为天文导航,组合导航,星敏感器;王腾飞(1993—),男,硕士研究生,研究方向为导航,嵌入式系统;钟红军(1978—),男,研究员,研究方向为星敏感器;王可东(1975—),男,副教授,研究方向为组合导航.
