双馈风力发电机的一次调频控制
2017-09-12李时东袁清晨徐大为
胡 浪,李时东,袁清晨,徐大为
(湖北民族学院 信息工程学院,湖北 恩施 445000)
双馈风力发电机的一次调频控制
胡 浪,李时东*,袁清晨,徐大为
(湖北民族学院 信息工程学院,湖北 恩施 445000)
风电机组并网冲击导致系统惯性降低,双馈风机发电机可通过对励磁电流的控制改变电机转速,从而利用转子动能调节功率支撑,减小对电网的扰动.针对变速风电机组的综合调频问题,通过对风力发电机一次调频特性的分析,结合矢量控制调功、附加功率惯性控制和PI变桨控制技术,实现了双馈风机一次调频组合控制,基于Matlab搭建了双馈风机发电系统仿真模型,仿真结果显示所采用的组合控制方案能对系统提供功率支撑,提高了系统频率稳定性.
双馈风力发电机;矢量控制;惯性控制;最大功率跟踪;变桨控制;调频
双馈风机因为具有独立的励磁绕组,相较于同步发电机而言,调节能力更强,通过调节励磁电流频率控制发电机转速,利用转子动能调节负荷,减小对电网的扰动,弱化高渗透率带给电网系统安全稳定运行的不利影响.
当前的主流双馈风机多采用基于定子磁链的矢量控制策略实现变速恒频发电和有功无功的独立解耦,它可以独立调节电磁转矩和无功功率、可实现最大风能捕获、传动链机械应力小,为电网提供必要的电压和频率支撑.同时,由于双馈风机通过变换器与电网相连,其与电网的弱耦合性导致转子侧不能响应频率的变换,因此调频能力有限.随着装机容量增加及其高渗透率,风电机组的机械惯性使得直流电压易受风电功率波动影响而失稳.研究双馈变速风机的快速有功功率控制,基于虚拟惯量,结合矢量控制和变桨控制技术,开发风电机组惯性支持与调频能力,从而为电网提供动态支撑是非常有意义的.
1 双馈风电机的功率控制
双馈发电机的定子直接和电网连接,转子经过一套双向功率变换器和电网相连,如图1所示.其风力机捕获的机械功率PM如式(1)所示[1]:
PM=0.5ρπCp(λ,β)R2ν3
(1)

图1 双馈风力发电机系统模型Fig.1 Doubly-fed wind power generator system model
其中:ρ为空气密度(0.125kg/m3);Cp(λ,β)为风能利用系数;λ为叶尖速比;λ=ωMR/ν;ωM为风力机的机械转速;β为桨距角;R为风力机风轮半径;ν为风速.
当双馈风力机运行在低于额定风速时,通过控制发电机实现不同风速下的风机捕获功率的PM最大化,经过对风力机转速的调节,维持最佳叶尖速度比来实现.风力机在不同桨距角下捕获的最大风能时,Cp(λ,β)最大应满足[2]:
∂Cp(λ,β)/∂λ=0
(2)

双馈风电机可以通过控制转子侧变流器的电流将转子侧的转速降到较低,相比定风速型风机能够提供更多的等效惯量.基于定子磁链定向的矢量控制[5]常用于双馈风机的功率独立解耦.当d轴定向于定子磁链时,电压与q轴同向,定子有功和无功功率为:
(3)
(4)

通过d轴q轴电流分别控制有功和无功功率,使得功率跟踪问题转化为式(3)~(4)中电流指令值的跟踪问题[6].由于忽略定子电阻,实际的定子功率不会恰好是目标值,误差还可能来自电机其它参数,为消除误差,在本文中,设计增加两个功率外环实现对功率的补偿,从而实现d轴电流和q轴电流跟踪,达到控制有功和无功功率的目的,包含外环控制器的电流跟踪模型如式(5)~(6):
(5)
(6)
其中:νdr,νqr为d、q轴转子电压,σ电机的漏电感系数,Lr转子电感,ψds、ψqs为d、q轴定子磁链,ωr转子角速度.
双馈风机采用矢量控制技术能够实现电流和功率的解耦控制,这也使得转子的动能惯性被隐藏起来,当电网因切机,负荷变化和瞬时故障而引起系统频率变化时,无法响应频率的变化,因此需要在矢量控制的基础上加入惯性调节和有功备用.
2 调频控制策略
2.1 风电机转子惯性控制
转子惯性控制的基本思想:改变转子侧变流器的电流,从而调节转速瞬时变化,通过释放或者存储风电机旋转的部分动能,以快速响应系统频率的暂态变化,提供类似于传统机组的转动惯性[7].
风电机组功率的参考值为:Pref=PMPPT+ΔP.
附加功率控制器添加基于频率偏差变化的附加功率为:
其中:Δf为系统频率偏差;Kdf为频率偏差微分比例系数;Kpf为频率偏差比例系数.
2.2 变桨控制
利用桨叶的迎风角度变化,增加或减小机械功率的输入,使其运行于最大功率点(或其下某点),从而释放或存储一定的备用容量.随着桨距角增加,机组留有的备用功率也增加.功率-转速特性曲线如图2所示:
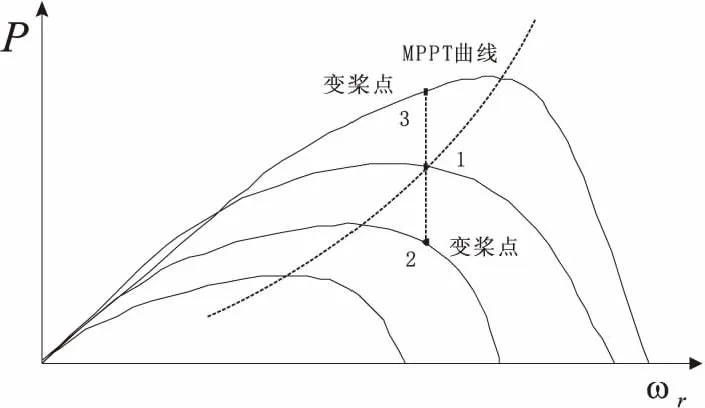
图2 功率-转速特性曲线Fig.2 Power-speed characteristic curve
当风力机稳定运行在最大功率点1时,系统频率为50Hz工频,输出功率为P1;若电网负载功率增加引起电网频率下降,则需要风电机组提供更多的有功功率支撑.通过减小桨距角β增加机组的风能捕获,提升输出功率,如从点1上升到3,此时机组输出功率从P1上升到P3;反之,当电网负载减小,电网频率上升,桨距角增大,风能捕获降低,运行点从1到2,机组减载运行提供更多的功率备用.
通过叶片桨距角调节进行一次调频[8-9],未能考虑虚拟惯性的影响,结合桨距角调节和虚拟惯性[10-11],考虑了频率偏差和功率偏差反馈,但没有考虑功率的备用.本文在综合考虑桨距角调节和虚拟惯性的基础上,增加了有功备用和转速偏差反馈,为二次调频提供功率支撑,改进双馈风电机组的变桨控制方程为:
(8)
式中:K为频率偏差比例系数;βω为在转速恒定区时的桨距角;β0为减载备用运行时的桨距角;T1为时间常数.
3 算例仿真
3.1 双馈风力发电系统仿真模型

图3 仿真系统结构图Fig.3 Simulation system structure diagram
3.1.1 风力发电系统模型 在Matlab中建立如图3所示的通用仿真系统模型.为了验证双馈风电机组综合调频控制的问题.该仿真系统模型四台常规机组分在两个区域中.区域1包括机组1和2,区域1的所有负荷接入节点7,有功负荷为967MW;机组3和4位于区域2中,节点9的有功负荷为1 767MW.每台机组都装有调速器、电力系统稳定器和励磁系统.两区域通过中间线8互相联接.风电场有250台总容量为500MW双馈风电机组.C1和C2为无功功率补偿装置.

图4 虚拟惯性控制模块Fig.4 Virtual inertia control module
3.1.2 控制器模型
1)虚拟惯性控制模型.虚拟惯性参与调频是一个暂态过程,之后会快速恢复转速.为避免转速还原过程向系统吸收有功功率,导致系统频率的二次下降[12].结合式(8),增加转速保护系统模块使得附加功率恒定以维持转速稳定,添加转速恢复启动模块使系统恢复稳定后再使附加功率减小直到零.建立虚拟惯性控制器模型如图4.图4中,高通滤波器的作用是通过阻断稳态输入信号避免持久频率偏差影响控制策略.低通滤波器的作用是消除频率测量时噪音的干扰.
2)变桨控制器模型.通过频率偏差和功率偏差反馈,考虑功率的备用为二次调频提供功率支撑的变桨控制的一次调频控制器如图5.
3.2 仿真结果分析
考虑在节点7突然增加200MW有功功率负荷,分别在以下情形时,对系统的频率响应情况进行讨论.①双馈风电机组不参加调频;②双馈风电机组采用惯性控制调频策略;③双馈风电机组采用改进变桨控制调频策略;④双馈风电机组采用综合调频控制策略.

图5 一次调频控制结构图Fig.5 Control diagram of primary frequency regulation
图6显示了上述4种情况下有功功率负荷突增后,节点8的频率响应特性.从仿真结果可以看出,当双馈风电机组不参与频率调节时,系统频率偏差幅值最大,频率下降最明显;由于系统等效惯性增加,双馈风电机组采用惯性控制减少了系统频率偏差,系统频率下降变缓;后两种情形下,频率偏差幅值更小,频率偏差波动平缓,频率调整过程比较平稳.

图6 有功功率响应Fig.6 Active power response
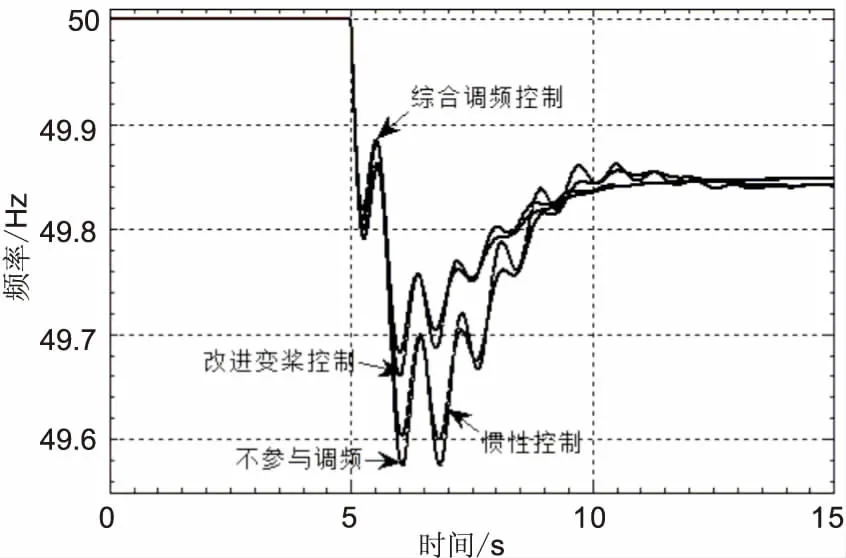
图7 系统的频率响应Fig.7 Frequency response of the system
图7显示了4种不同情形下双馈风电机组注入有功功率的响应曲线.惯性控制策略时,有明显的功率振荡;另一方面,采用改进变桨控制策略时,双馈风电机组注入的有功功率比惯性控制的要多;双馈风电机组综合调频控制输出的有功功率能够更快、较平稳地达到其额定输出功率.结合4种情形下的频率响应曲线可知:双馈风电机组参与频率调节时,其迅速注入的有功功率,能够快速的给负荷突变提供有功补偿,减少了频差波动的幅值.且双馈风电机组注入的有功功率越多,系统频率偏差幅值就越小.在调节频率的瞬时过程中,双馈风电机组是通过释放部分转子中的旋转动能来增加其额外的注入功率.双馈风电机组参与频率调节负荷突增时会引起转速下降,惯性控制策略转速下降程度比改变桨进控制策略下的情形小.采用改进变桨控制时,其转速下降程度比虚拟惯性控制恢复到最佳转速的时间短.结合频率响应曲线可知:改进控制策略与惯性控制策略相比,能获得更好的频率响应,但双馈风电机组的转速变动较大.
4 结论
通过对传统变桨控制一次调频控制调频策略的改进,结合矢量控制、惯性控制和变桨控制的模型性能良好,4种工况下的仿真结果显示:
1)采用改进变桨控制策略时,双馈风电机组注入的有功功率比惯性控制策略时要多.
2)双馈风机在综合调频控制策略下,不仅具有可控的惯性响应,也具有一次调频能力,有功备用使其具有相对的二次调频能力.
3)双馈风电机组参加频率调节时,有功功率的注入,能够快速的给负荷突变提供有功补偿,减少了频差波动的幅值.
[1] 艾青.变速恒频风力发电机组最大能量捕获策略研究[J].湖北民族学院学报(自然科学版),2012,30(2):207-210+214.
[2] 陈家伟,陈杰,龚春英.变速风力发电机组恒带宽最大功率跟踪控制策略[J].中国电机工程学报,2012(27):32-38+179.
[3] 柳伟,顾伟,孙蓉,等.DFIG-SMES互补系统一次调频控制[J].电工技术学报,2012(9):108-116.
[4] 汝冰,杨玉鹏,刘志武,等.风电机组参与电网一次调频的控制策略研究[J].黑龙江电力,2015(1):42-48,53.
[5] 徐占华.矢量控制在双馈异步内力发电系统中的应用[J].内蒙古民族大学学报(自然科学版),2017,10(2):32-33.
[6] 接峰,黄进.三相PWM整流器直接功率控制的新调制方法[J].电力电子技术,2006,40(4):9-11.
[7] 慧凝.双馈风力发电机组的虚拟惯性调频技术综述[J].黑龙江科技信息,2016(7):87-88.
[8] MAURICIO J M, MARANO A, GOMEZ-Exposito A, et.al.Frequency regulation contribution through variable speed wind energy conversion systems[J].IEEE Trans On Power Systems,2009,24(1):173-180.
[9] YE W,DELILLE Gr,HERMAN B,et al.High wind power penetration in isolated power systems-assessment of wind inertial and primary frequency responses[J].IEEE Transaction on Power Systems,2013,28(3):1-9.
[10] 晓荣,赵猛,王毅.双馈感应风力发电机组复合频率控制策略研究[J].电力系统保护与控制,2012(8):20-24,29.
[11] 曹军,王虹富,邱家驹.变速恒频双馈风电机组频率控制策略[J].电力系统自动化,2009,33(13):78-82.
[12] 丁磊,尹善耀,王同晓,等.考虑惯性调频的双馈风电机组主动转速保护控制策略[J].电力系统自动化,2015(24):29-34,95.
责任编辑:时 凌
Primary Frequency Control of Doubly-fed Wind Power Generator
HU Lang,LI Shidong*,YUAN Qingchen,XU Dawei
(School of Information Engineering,Hubei University for Nationalities,Enshi 445000,China)
The system′s inertia will be decreased when the wind turbine is connected to the grid,and the doubly-fed fan generator can change the speed of the motor by controlling the excitation current so that the power of the rotor can be adjusted to reduce the disturbance to the power grid.For the overall frequency of variable speed wind turbine,a doubly-fed fan frequency modulation control is achieved by analyzing the primary frequency of the wind turbine and combining with the vector control of power modulation,additional power inertia control and PI pitch control technology.The simulation model of doubly-fed generator system is built based on Matlab,and the simulation results show that the composite control scheme used in this paper can provide power support for the system and improve the frequency stability of the system.
doubly-fed wind generator;vector control;inertial control;maximum power tracking;pitch control;frequency regulation
2017-05-27.
国家自然科学基金项目(31360408).
胡浪(1989-),男,硕士生,主要从事电力系统及其自动化的研究;*
李时东(1971-),博士,教授,主要从事信息处理、控制系统和算法优化等的研究.
1008-8423(2017)03-0339-04
10.13501/j.cnki.42-1569/n.2017.09.020
TM614
A
