基于激光雷达的挖掘机器人回转避障研究*
2017-09-11朱建新汪志杰赵喻明边国敏
朱建新, 罗 刚, 汪志杰, 吴 钪, 赵喻明, 边国敏
(1.中南大学 高性能复杂制造国家重点实验室,湖南 长沙 410083;2.山河智能装备股份有限公司 国家级企业技术中心,湖南 长沙 410100)
基于激光雷达的挖掘机器人回转避障研究*
朱建新1,2, 罗 刚1, 汪志杰2, 吴 钪2, 赵喻明1,2, 边国敏1
(1.中南大学 高性能复杂制造国家重点实验室,湖南 长沙 410083;2.山河智能装备股份有限公司 国家级企业技术中心,湖南 长沙 410100)
针对挖掘机器人在回转过程中易发生事故的现象,提出了工作装置回转避障方法。通过分析挖掘机器人工作装置的运动特性,结合运动学建立了挖掘机器人的运动学模型。利用安装在挖掘机器人两侧的激光雷达对作业环境进行识别,根据识别的障碍物求解可行域,并通过避障算法控制挖掘机器人避开障碍物。实验结果表明:挖掘机器人能安全避开障碍物,证明了方法的可行性。
挖掘机器人; 运动学模型; 激光雷达; 避障算法
0 引 言
挖掘机作为工程机械的主要装备之一,应用于工程建设中的诸多领域,其主要的工作方式为远程遥控和现场操作。远程遥控操作挖掘机不仅安全性高,而且操作简单、控制精度高[1]。实际上,挖掘机器人在两种工作方式中均可能在回转过程中发生事故。若使挖掘机器人在回转过程中进行环境识别,同时进行实时避障,可避免因环境变化或操作疏忽所引起的事故。
文献[2]提出了用广义逆法解决多自由度机器人避障问题,但其受不可行解的限制;文献[3,4]通过递归神经网络算法有效地改善了广义逆的不足,但对算法的实时性和鲁棒性要求很高。文献[5]通过超声波距离传感器实现了基于知识的自主避障,忽略了障碍物出现在规划的路径上。
因激光雷达相对其他测距传感器而言,具有扫描速度快、测距精度高、不易受环境干扰等优点[6,7]。本文采用激光雷达识别挖掘机周围环境信息。为减少挖掘机器人在作业中因回转引起的事故,提出了一种避免求解广义逆,降低对算法的要求和满足实际需求的避障方法,并通过实验验证了控制算法的可行性。
1 建模与障碍域划分
1.1 挖掘机器人运动模型建立
分析挖掘机器人的工作装置,可知工作装置通过油缸伸缩改变其关节角而实现位置变换,因此,通过挖掘机器人工作装置的关节角可以建立其运动学模型,进而驱动模型运动。
建立挖掘机器人工作装置的运动坐标系,如图1所示。
将挖掘机器人工作装置分为动臂(动臂、动臂油缸和斗杆油缸)、斗杆(铲斗油缸)和铲斗3个部分,并建立各自的局部坐标系,以动臂坐标系为绝对坐标系。

图1 工作装置坐标系
坐标系x0o0y0中,可通过式(1)计算动臂部分的关键点坐标
(1)
式中xa和ya为关键点的坐标值;la为关键点A到坐标原点O的距离;θa为AO与OF之间的夹角。l1,la和θa的值可通过测量得到。

(2)
(3)
式中0T1为坐标系x1o1y1相对于坐标系x0o0y0的变换矩阵;xb和yb为关键点的坐标值;lb为关键点B到坐标原点F的距离;θb为FQ与BF之间的夹角;l2,lb和θb可通过测量得到。

(4)
φ=θ2-π
(5)
(6)
式中0T2为坐标系x1o1y1相对于坐标系x0o0y0的变换矩阵;xc和yc为关键点的坐标值;lc为关键点C到坐标原点Q的距离;θc为FQ与QV之间的夹角。l3,lc和θc可通过测量得到。
用上述方法求解挖掘机器人工作装置的关键点坐标,并用编程软件建立工作装置的二维模型。通过上、下位机之间的通信,可将挖掘机器人工作装置的关节转角实时传递给运动模型中的关节转角变量,保证工作装置的二维模型与挖掘机器人工作装置同步运动,为后面挖掘机器人避障提供理论分析依据。
1.2 挖掘机器人障碍域划分
通过实验分析,设定合适的安全距离,使图1中的OF,FQ和QV分别向上和向下平移给定的距离,作为上、下边界线。粗略地定义出挖掘机器人工作装置障碍域的边界。因使用线性规划的方法添加约束条件会使问题变得复杂,所以采用等分的膨化圆作为约束条件。分别取O,F,Q,V对应的上、下边界的平移点的中点坐标,并将对应的上、下边界的中点坐标进行等分作为膨化圆的圆心,计算公式为
(7)
式中 (x,y)为膨化圆圆心坐标;(x1,y1)为起点中点坐标;(x2,y2)为终点中点坐标;n为总的等分数;μ为当前等分数。
根据动臂、斗杆和铲斗的尺寸和工作特性,分别确定各部分的等分数,并用等分点作圆心画膨化圆,以对应的上下边界线之间的距离为直径,最终的障碍域划分如图2所示。

图2 工作装置的障碍域
2 避障关节转角求解
将激光雷达横放并安装在与工作装置平行的位置,使其检测正前方的铅垂面,以使扫描的点直接投影到挖掘机器人工作装置的二维模型中,减少转换计算中的误差。
挖掘机器人在回转过程中的避障方式大体可分为工作装置向外伸避障、向内收避障和急停。对于障碍域下边界线而言,即为工作装置向外伸避障;而上边界线则向内收避障;挖掘机器人在障碍域内发现避不开的障碍物则为急停。因此,工作装置的避障关节转角就是边界线刚过障碍域内所有障碍点的转角。因实际中向内收避障的情况较少,以工作装置向外伸避障作分析。为简化分析,提取障碍域中一部分作障碍域简图分析计算,障碍域简图如图3。

图3 障碍域简图
如图3所示,由直线AD,m,n构成假定的障碍域,黑点为假定在障碍域内识别的障碍物。为简化避障过程,选取避障区域中一直线n为参考,当直线n由当前位置转到直线c位置时,工作装置便完成向外伸避障。在此过程中,障碍域绕O点转动的角度可通过直线k的旋转变化角度进行求解,此处记转动角度为θ,而
θ=θ1+θ2
(8)
θ3=arcsin(rOA/|b|)
(9)
θ1=arccos (b·k/(|b||k|))
(10)
式中θ2转换为θ3后,可通过式(9)求解;θ1为b(旋转中心O与障碍点构成的向量)与k(过旋转中心O且与避障域下边界平行的向量)构成的夹角,可通过式 (10)进行求解,θ的计算公式为
θ=arcsin(rOA/|b|)±arccos (b·k/(|b||k|))
(11)
式中 ±根据障碍点在直线k上、下方决定,上方为+,下方为-。对于动臂、斗杆和铲斗均可以用上述方法进行求解避障关节转角。向内收避障情况,仍可以用该方法计算,只需将式(11)中的±改为∓,rOA改为rOD。但是上述方法不能处理下列特殊情况
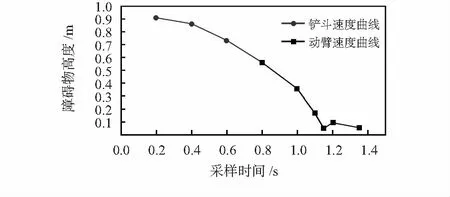
|b| (12) 对于式(12)中的2种特殊情况,处理如下:对于动臂而言,为了不让激光雷达识别到下车和驾驶室而引起误操作,使膨化等分圆的起点圆心向后移;而斗杆和铲斗出现式(12)中的2种情况,可通过动臂举升使斗杆和铲斗避开障碍物。 挖掘机器人回转避障方式可分为自主和半自主2种方式。自主避障为操作人员设定目标回转角度后,挖掘机器人自动回转到目标位置并能避开回转过程中的障碍物;半自主方式为操作手通过手柄操作挖掘机回转,当挖掘机器人识别到障碍物后,自主进行避障操作,随后恢复手柄操作功能。挖掘机器人回转避障过程,如图4所示。 图4 挖掘机器人回转避障过程 为了实现挖掘机器人工作装置回转避障,通过如下算法进行避障规划: 1)通过激光雷达识别障碍物信息,并根据障碍物分布情况做避障决策,具体为: a.判断障碍物是否在急停域内(挖掘机器人工作装置各关节角均处于极限位置时的障碍域),若在,则中断所有操作; b.若动臂、斗杆和铲斗的障碍域内均有障碍物,则执行动臂避障; c.若斗杆和铲斗障碍域内都有障碍物,则执行斗杆避障; d.若障碍物仅在动臂、斗杆和铲斗中的一个障碍域内,则执行对应工作装置避障; e.若障碍物出现在斗杆或铲斗的障碍域中且满足式(12)的条件或斗杆和铲斗油缸运动到接近极限位置时仍不能避开障碍物,则执行动臂避障; f.若障碍物点出现在障碍域和急停域之间,则中断回转操作而执行避障指令。 2)当发现障碍物时,利用式 (11)求解此时的避障关节转角Δθ1,Δθ2,…,Δθn,其中,n为障碍域内点的个数,通过比较选取最大的避障关节转角Δθmax,并与后一时刻的最大避障关节转角进行比较,取最大的避障关节转角,同时,保存最大障碍物点的坐标信息(xmax,ymax)。 3)对于步骤(1)中的情况,式(5)将判断最大障碍物点是否在障碍域内的结果作为避障的标志位;而对于其他情况(除急停外)将前一时刻的关节转角与最大避障关节转角之和(向外伸避障)或差(向内收避障)与当前关节转角进行比较,并将其结果作为避障的标志位。 4)通过求解的最大避障关节转角和设定的回转速度来确定相应工作装置的脉宽调制(pulse width modulation,PWM)的占空比,从而进行工作装置避障速度的控制。 实验平台的主要硬件有IFM控制器、采集卡、CAN/TCP、激光雷达、拉线传感器等,实验平台如图5所示。 图5 实验平台 实验如下:使挖掘机器人以平均速度为0.45 r/min的回转速度进行回转,并在挖掘机回转过程中将障碍物放置在与铲斗将要碰撞的位置。实验的实物如图6,为铲斗识别障碍物和铲斗避开障碍物。 图6 铲斗识别和避开障碍物 障碍物的高度为最大障碍物点到障碍域下边界的距离。图7为铲斗避障的过程,挖掘机器人一开始就识别最大障碍物点,且铲斗一直运动到极限位置,最后通过动臂的举升避开障碍物,随后也出现了轻微的抖动。 图7 铲斗避障过程 1)通过等分膨化圆来定义障碍域,不仅可以很好地识别障碍点信息并求解可行域,而且还可以根据障碍点的分布进行避障规划; 2)挖掘机器人工作装置在回转过程中避开障碍物实验,证明了方法的有效性; 3)将该控制研究应用到实际中,可避免挖掘机器人在回转过程中因操作疏忽或挖掘机器人周围环境变化所引起的事故。 [1] Liu Yang,Hassan Mohammad Shahidul,Yu Hongnian.Modeling and remote control of an excavator[J].International Journal of Automation and Computing,2010,7(3):349-358. [2] Maciekewski A A,Klein C A.Obstacle avoidance for kinematically redundant manipulators in dynamically varying environments[J].International Journal of RoboticsRes,1989,4:109-117. [3] Zhang Y,Wang J.Obstacle avoidance for kinematically redundant manipulators using dual neural network[J].IEEE Trans on Systems Man and Cybernetics—Part B:Cybernetics,2004,34(1):752-759. [4] Park Hyongju,Lee Sanghak,Chu Baeksuk,et al.Obstacle avoi-dance for robotic excavators using a recurrent neural network[C]∥IEEE Internation Conference on Smart Manufacturing Application,Kintex,2008:585-590. [5] 王 华,喻开安,冯培恩,等.挖掘机器人满斗运土和空斗返回过程的避障[J].建筑机械,1995,10(9):26-28. [6] 于金霞,蔡自兴,邹小兵,等.基于激光雷达的移动机器人障碍测距研究[J].传感器与微系统,2006,25(5):31-34. [7] 杨象军,项立宇,刘济林.基于四线激光雷达的校园道路的检测与跟踪[J].传感器与微系统,2013,32(9):134-138. Study on obstacle avoidance of excavator robot rotating based on laser radar* ZHU Jian-xin1,2, LUO Gang1, WANG Zhi-jie2, WU Kang2, ZHAO Yu-ming1,2, BIAN Guo-min1 (1.State Key Laboratory of High Performance Complex Manufacturing,Central South University, Changsha 410083,China; 2.National Enterprise R&D Center,Sunward Intelligent Equipment Co Ltd,Changsha 410100,China) Aiming at the phenomenon of excavator robots easily having accidents in the course of swing,a method is put forward for excavator robots to avoid barriers in this process.By analyzing kinetic characteristic of working device of excavator robot and combining kinematics,kinematics model for robot is established.Laser radar which are installed on both sides of the excavator robot working device are used to identify the operating environment in the process of the excavator robot swing.According to the identified obstacles to solve feasible region,the system will apply the obstacle avoidance algorithm to make the robot avoid obstacles.The experimental results show that the excavator robot prototype can safely avoid obstacles,which verifies the feasibility of the method. excavator robot; kinematics model; laser radar; obstacle avoidance algorithm 10.13873/J.1000—9787(2017)09—0041—04 2016—09—21 国家“十二五”科技支撑计划资助项目(2013BAF07B02) TP 242.2 A 1000—9787(2017)09—0041—04 朱建新(1965-),男,博士,教授,从事工程装备与电液控制自动化领域基础研究与实用开发工作。3 避障控制算法

4 实验论证


5 结 论
