纱线毛羽骨架及长度的跟踪测量
2017-09-03孙银银潘如如高卫东
孙银银, 张 宁, 吴 洋, 潘如如, 高卫东
(1. 常熟理工学院 艺术与服装工程学院, 常熟 江苏 215500; 2. 江南大学 纺织服装学院, 无锡 江苏 214122)
纱线毛羽骨架及长度的跟踪测量
孙银银1, 张 宁2, 吴 洋2, 潘如如2, 高卫东2
(1. 常熟理工学院 艺术与服装工程学院, 常熟 江苏 215500; 2. 江南大学 纺织服装学院, 无锡 江苏 214122)
针对现有图像法毛羽测量存在的缺陷,提出了一种用于毛羽分析和长度测量的纱线毛羽骨架跟踪算法。首先以10像素为步长,作纱线条干边缘曲线对毛羽骨架的分割线,得到毛羽起点;接着在毛羽延伸方向上对毛羽起点的上5-邻域点或下5-邻域点进行判断,得到新的毛羽路径点,进行邻域点的重复判断,直到没有毛羽路径点存在,依次记录所有毛羽点生成毛羽路径,并提出了多毛羽路径点和交叉毛羽的解决方案;最后根据2点间的距离计算出毛羽路径中相邻毛羽路径点的像素,从而得到毛羽的测量长度。对长毛羽的跟踪测量和固定分割长度测量的结果显示,毛羽骨架及长度的跟踪测量算法可将测量长度提高24.3%~666%,测量结果较为精确。
纱线毛羽; 毛羽骨架; 毛羽长度; 跟踪算法
纱线毛羽是衡量纱线和织物外观与质量的重要指标之一[1-2]。长毛羽过多会使织造和染色工序生产效率降低,且布面易起球[3-4]。在纱线生产过程中对纱线毛羽进行准确检测,有效控制毛羽的产生,一直是纺织企业面对产品质量控制的主要任务之一[5-6]。纱线毛羽空间形态的复杂多变,使得现有的光电式毛羽仪在测量毛羽长度时,存在检测盲区和信息采集不全等缺陷[7-8]。随着科学的不断发展和学科间的相互交叉、融合,采用图像处理和分析技术实现对纱线毛羽测量也有了新的发展趋势[9-11]。在现有的研究中,由于图像中毛羽弯曲多变,相互交叉,因此现有毛羽分析算法无法获取形态复杂多变的毛羽全部信息,达到对毛羽长度的准确测量。
本文在已有毛羽分析、测量算法的基础上,提出基于毛羽骨架分析和跟踪算法,用于得到完整的毛羽骨架信息,较好地避免了毛羽信息的遗漏。以纱线条干边缘曲线毛羽测量基准线,先检测出毛羽起点,对毛羽起点的上、下5-邻域点进行毛羽点判断,直到没有新的毛羽点存在,依次记录所有毛羽点生成毛羽路径,计算出毛羽路径中所有毛羽点的总像素,从而得到毛羽的测量长度。
1 毛羽长度测量
由于不同纤维的自身特性,使得纱线毛羽空间形态各异,延伸方向多变,采集的纱线图像中毛羽排列杂乱无章,造成毛羽精确测量的困难,纱线毛羽样本的6帧图像均是由MOTIC视频显微镜捕获。为便于对毛羽进行测量,运用MatLab图像处理软件对所有图像进行灰度转换、OTSU图像分割、形态学运算和图像骨架一系列图像处理后,分别得到纱线条干和毛羽骨架[7],如图1、2所示。

图1 纱线条干二值图像Fig.1 Binary images of yarn core. (a) Sample 1; (b) Sample 2; (c) Sample 3; (d) Sample 4; (e) Sample 5; (f) Sample 6

图2 纱线毛羽骨架Fig.2 Yarn hairiness skeletons. (a) Sample 1; (b) Sample 2; (c) Sample 3; (d) Sample 4; (e) Sample 5; (f) Sample 6
将条干边缘曲线设置为测量分割线,平行于纱线条干,做毛羽骨架的等距分割线,距离为1 mm,测量6帧纱线毛羽样本图像中大于等于1、2、3、4、5、6 mm的毛羽根数,即采用固定长度法得到毛羽长度和根数的分级统计结果,如表1所示。
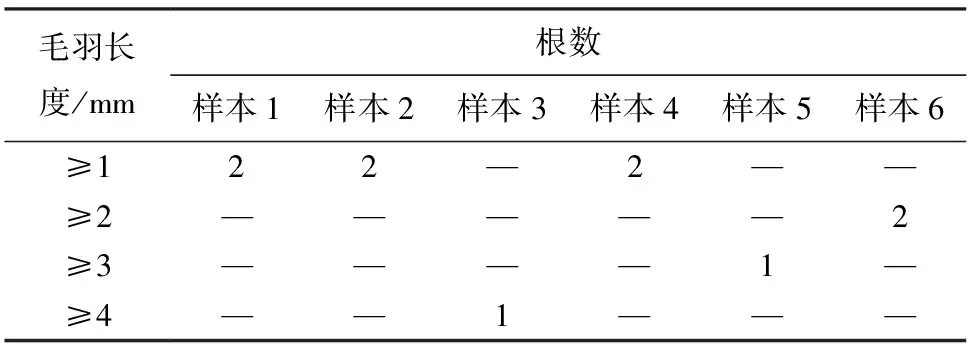
表1 固定分割测得的毛羽长度和根数
由测得的毛羽长度可知,采用固定长度分割毛羽对毛羽长度的测量存在较大误差。造成这种结果的主要原因为纱线毛羽不仅在延伸方向存在弯曲和卷曲,而且在纱线条干轴向存在较长的倒向延伸和相互交叉,以至于现有的光电法毛羽仪和图像毛羽测量,无法实现全毛羽的信息分析,因而不能得到精确的毛羽测量长度。
2 毛羽骨架跟踪
为获取完整的毛羽骨架信息,运用跟踪算法用于确定毛羽骨架路径。由图2中6帧纱线毛羽骨架图像可看出,毛羽形态各异致使现有的跟踪算法无法实现对不同形态的毛羽进行准确跟踪,因此要想准确地跟踪每根毛羽,需设计适应性较好的跟踪算法。
2.1 毛羽起点
二维纱线图像中,条干边缘与毛羽相连的点即是毛羽起点,即毛羽衍生的起始点。要实现毛羽跟踪,就必须先确定毛羽骨架的起点。从纱线条干图像中提取条干边缘曲线,记作E,找出上边缘点的上邻域点QS或下边缘点的下邻域点QX,如图3所示。

图3 纱线条干边缘点的上、下5-邻域点Fig.3 Upper and lower 5-neighborhoods of yarn edge points
以QS和QX为毛羽骨架起点,分别对QS的上5-邻域点(n1,n2,n3,n4和n5)和QX的下5-邻域点(n1,n2,n3,n4和n5)进行判断,若n1,n2,n3,n4和n5中存在像素为1的点,那么点QS和QX即为毛羽起点,且QS为上毛羽起点(纱线图像中,条干上面的部分),QX为下毛羽起点(纱线图像中,条干下面的部分),以此得到图2的6帧毛羽骨架图像中的毛羽起点个数见表2中的初始值所列。由表2中所列毛羽起点个数的初始值及表1中毛羽的长度和根数可看出,由上述方法检测到的毛羽起点存在误判,起点个数远多于图像中毛羽的根数,因此需对所提出的毛羽起点判断方法进行优化。

表2 图2中毛羽骨架起点的个数
2.2 毛羽起点的优化
针对毛羽起点判断存在的错误,依次进行以下2步的毛羽起点优化。
1)纱线分割时,条干边缘的部分粗节和小刺被分割成毛羽,即假毛羽,造成毛羽起点的错误和增加,如图4所示。纱线条干分割出来时,图4(a)中A部位的部分条干被分割毛羽,如图4(c)中的A2部位,进而在提取毛羽骨架的过程中,形成毛羽骨架,影响毛羽起点判断。

图4 假毛羽的形成Fig.4 Forming of false hairiness. (a) Part of yarn binary image; (b) Part of yarn core; (c) Part of yarn hairiness; (d) Part of hairiness skeleton
为避免因纱线分割对毛羽起点判断造成的影响,在距离条干边缘10像素点处,用条干边缘曲线分割毛羽,边缘曲线与毛羽的交叉点即为新的毛羽起点。优化中避免了假毛羽的存在对像素点的影响,提高毛羽起点的正确性,优化后的毛羽起点个数,见表2中的改进1所列。优化过程中被忽略的10像素内毛羽长度,可在计算毛羽长度时直接加上10像素。
2)条干曲线分割毛羽时,毛羽中部分直线形态与条干边缘曲线中的部分直线形态重叠,造成一根毛羽有多个相邻的毛羽起点。为避免毛羽起点的重复,保留毛羽起点中相邻且行数相同、列数最小或最大的毛羽起点,其余的删除。经过这次改进后得到的毛羽起点个数如表2中的改进2所列。结果显示经过2次优化,毛羽起点的个数大幅度减小,每帧图像中的毛羽起点可基本确定,最终确定图2中6帧毛羽骨架图像中毛羽起点如表3所列。

表3 毛羽起点位置
2.3 毛羽路径
毛羽形态变化的随机性,使毛羽路径中相邻毛羽点的相对位置随机性较大,造成毛羽路径跟踪困难。同一种跟踪方法无法实现对所有毛羽的同时跟踪,因此,要以毛羽起点为基点,对所有毛羽进行逐一跟踪。以毛羽起点为初始点,依次记录所有毛羽路径点生成毛羽路径。纱线毛羽路径判断示意图如图5所示,A中Q点表示毛羽起点,若Q点为上毛羽起点(纱线图像中位于纱线条干上部),n1,n2,n3,n4,n5为Q点的上5-邻域点;若Q点为下毛羽起点(纱线图像中位于纱线条干上部),n1,n2,n3,n4,n5为Q点的下5-邻域点。

图5 纱线毛羽路径Fig.5 Path of yarn hairiness
毛羽路径点的判断过程和毛羽路径生成步骤如下。
1)分别对毛羽起点Q的上、下5-邻域点进行毛羽路径点判断,结果显示Q的上5-邻域点中仅有n5的像素为1,其下5-邻域点中仅有n4的像素为1,这就表明n5和n4分别为Q的上毛羽路径点和下毛羽路径点,将n5和n4记作Q1和q1,得到的毛羽路径分别是[Q,Q1,…]和[Q,q1,…],如图5中B所示。
2)将Q1和q1记作新的毛羽起点,分别对Q1上5-邻域点和q1的下5-邻域点进行新一轮的毛羽路径点判断。其中,Q1的左邻域点n2和q1的左邻域点和右邻域点n1和n2是已知的非毛羽路径点,可不再进行判断。对其余的邻域点进行判断的结果显示,Q1的邻域点n3和q1的邻域点n5是毛羽路径点,将这2点分别记作Q2和q2,得到新的毛羽路径分别是[Q,Q1,Q2,…]和[Q,q1,q2,…],如图5中C所示。
3)将Q2和q2记作新的毛羽起点,重复进行步骤2)判断得到Q2的邻域点n3和q2的邻域点n3为毛羽路径点,分别将这两点记作Q3和q3,新的毛羽路径分别是[Q,Q1,Q2,Q3,…]和[Q,q1,q2,q3,…](如图5中D所示)。将Q3和q3作为新的毛羽起点,继续上述步骤,直到新的毛羽起点的5-邻域点和反方向5-邻域点中都没有符合毛羽点的点存在时,该毛羽起点为最后一个毛羽路径点,最终得到的毛羽路径分别是[Q,Q1,Q2,Q3,…,Qn-1,Qn]和[Q,q1,q2,q3,…,qn-2,qn-1,qn],如图5中D所示。
2.4 多毛羽路径点判断
毛羽形态的复杂化造成相邻毛羽点之间的性对位置的随机性较大,出现同时有多个毛羽点符合新的毛羽路径点的情况,为了对这些毛羽点在毛羽路径中的具体位置进一步确定,针对不同情况提出解决方案和判断流程如图6所示。

图6 多毛羽路径点的算法Fig.6 Algorithm of multi-hairiness path
1)2个毛羽点路径判断如图7、8所示,h表示当前毛羽起点,5-邻域点h0,h1,h2,h3和h4中,由于h为毛羽点,所以h0和h1是已知的非毛羽点,因此有2个毛羽点共同存在的情况有h2和h3或者h3和h4。检测到2个毛羽点时,分别对2毛羽点的5-邻域点进行毛羽路径点判断,最终毛羽路径有以下几种情况。

图7 向下延伸的毛羽路径Fig.7 Hairiness path of downwards extending. (a) Path points h2and h3; (b) Path points h3and h4

图8 向上延伸的毛羽路径Fig.8 Hairiness path of upward extending. (a) Path points h2and h3; (b) Path points h3and h4
(i)毛羽点h2和h3中,若h2的5-邻域中存在毛羽路径点,毛羽路径有[…,h,h3,h2,h5,…]或[…,h,h3,h2,h6,…]或[…,h,h3,h2,h7,…]或[…,h,h3,h2,h8,…];若h3的5-邻域中存在毛羽路径点,毛羽路径有[…,h,h2,h3,h7,…]或[…,h,h2,h3,h8,…]或[…,h,h2,h3,h9,…],如图7(a)和图8(a)所示。
(ii)毛羽点h3和h4中,若h3的5-邻域中存在毛羽路径点,毛羽路径有[…,h,h4,h3,h7,…]或[…,h,h4,h3,h8,…]或[…,h,h4,h3,h9,…];若h4的5-邻域中存在毛羽路径点,毛羽路径有[…,h,h3,h4,h8,…]或[…,h,h3,h4,h9,…]或[…,h,h3,h4,h10,…]或[…,h,h3,h4,h11,…],如图7(b)和图8(b)所示。
(iii)在确定毛羽路径时,图7(a)和图8(a)中,h2和h3存在2个共同的邻域点h7、h8,去掉图7(a)和图8(a)中[…,h,h2,h3,h7,…]、[…,h,h2,h3,h8,…]2个毛羽路径;同样在图7(b)和图8(b)中,h3和h4存在2个共同的邻域点h8和h9,去掉图7(b)中和8(b)中[…,h,h4,h3,h8,…][…,h,h4,h3,h9,…]2个毛羽路径。
2)3个毛羽点路径判断如图9所示,h1点是当前毛羽点,h2,h4和h5是同时检测到的毛羽点,最终达到的毛羽路径有以下几种情况:若h2的5-邻域点存在毛羽路径点,得到的毛羽路径是[…,h,h1,h5,h4,h2,h6,…]或[…,h,h1,h5,h4,h2,h7,…],如图9(a)所示;若h4的5-邻域点存在毛羽路径点,得到的毛羽路径是[…,h,h1,h2,h4,h5,h10,…]或[…,h,h1,h2,h4,h5,h11,…]或[…,h,h1,h2,h4,h5,h12,…]或[…,h,h1,h2,h4,h5,h13,…],如图9(b)所示;若h5的5-邻域点存在毛羽路径点,得到的毛羽路径是[…,h,h1,h2,h5,h4,h9,…]或[…,h,h1,h2,h5,h4,h10,…]或[…,h,h1,h2,h5,h4,h11,…],如图9(c)所示。

图9 向下延伸的毛羽路径Fig.9 Hairiness path of downwards extending. (a) Neighborhood points of h2; (b) Neighborhood points of h5; (a) Neighborhood points of h4
在确定毛羽路径时,图9(b)、9(c)中,h4和h5存在2个共同的邻域点h10和n11,去掉图9(b)中[…,h,h1,h2,h4,h5,h10,…],[…,h,h1,h2,h4,h5,h11,…]这2个毛羽路径。
在确定毛羽路径时,针对毛羽细化图像中存在毛羽相交的情况,提出相应解决方案,首先应确定并记录毛羽交叉点信息,然后在进行毛羽路径判断。通过毛羽交叉点的邻域点个数,来确定该毛羽点是否为交叉点,首先应排除该毛羽点8-邻域中已经确定的毛羽路径点,然后判断其余邻域点是否符合路径要求,若符合,统计其个数,若有2个及以上的邻域点是新的路径点,那么,该毛羽点即为骨架图像中毛羽交叉点。
3 长毛羽测量
3.1 每帧图像中毛羽的起点
实验中,采用图2中的六帧毛羽骨架图像为样本,图像中纱线是线密度为11.7 tex的纯棉纱,运用2.1小节中优化过的毛羽起点算法,在距离纱线条干边缘10像素点处,做毛羽骨架起点的检测线,如图10所示。

图10 毛羽起点检测线Fig.10 Detection lines of hairiness skeletons. (a) Sample 1; (b) Sample 2; (c) Sample 3; (d) Sample 4; (e) Sample 5; (f) Sample 6
将毛羽起点根据列数从大到小排列,如表3所列,从中可发现检测到的不仅有长毛羽起点也有短毛羽起点,且弯曲较大的毛羽检测到2个毛羽起点,如图2中毛羽骨架2和5。为便于正确地测量毛羽长度和更好地与固定分割算法进行对比,根据毛羽起点的列数,提取出长毛羽的毛羽起点。结合图10中分割结果和表3毛羽起点坐标,图2中毛羽骨架样本5检测到1个毛羽起点外,其余的第1个毛羽起点都是长毛羽的起点,进而得到的6帧毛羽骨架图像中长毛羽起点位置坐标如表4所列。

表4 长毛羽起点
3.2 长毛羽的路径
以表4中得到的长毛羽起点作为毛羽骨架跟踪的初始点,运用文中提出的毛羽骨架跟踪算法,对图2中6帧毛羽骨架图像中的长毛羽进行毛羽路径的跟踪。毛羽弯曲部位,出现的多个毛羽点情况,可根据多毛羽点的判断方法进行跟踪;毛羽卷曲部位,在毛羽延伸方向无毛羽点存在,可在延伸方向的反方向对当前毛羽点的5-邻域点进行判断。经过多次判断后,直到当前毛羽点延伸方向的5-邻域点和反延伸方向的5-邻域点中都没有新的毛羽点存在时,算法停止,从而得到6帧毛羽骨架图像中6根长毛羽的毛羽路径和毛羽点个数,如表5所示。
3.3 毛羽长度
毛羽路径记录着整根毛羽的重要信息,毛羽点个数、毛羽延伸方向、毛羽形态以及相邻2毛羽点的相对位置——这个相对位置是计算毛羽长度的关键信息。要得到正确的毛羽测量长度,首先根据2点pi(x,y)和pi+1(x,y)之间的距离,计算出相邻2个毛羽点之间的像素和所有z像素(n-1)的像素和;将得到的像素和加上10像素(因毛羽起点判断忽略掉的10像素)后,依据图像中1 mm内有108像素,将得到的整根毛羽的像素转换成mm的长度单位,测的毛羽测量长度结果见表6所示。

表5 长毛羽路径

表6 长毛羽的测量长度
将毛羽跟踪法和固定长度分割法得到的长毛羽的测量长度结果进行对比,如表6所列。从中可看出,跟踪法得到的毛羽测量长度比固定长度分割法测得的长度都要长,图2中毛羽长度增加最大达到6.66 mm,如毛羽骨架样本1;长度增加最小是0.97 mm,如毛羽骨架样本3,造成这种结果的原因,主要是样本1在平行于纱线条干的方向上,延伸较样本3大;而在垂直方向上的延伸较样本3小,也就是说样本3毛羽的形态较样本1规整,因此采用平行的固定分割毛羽骨架时,样本1比样本3更容易遗漏毛羽路径信息,而毛羽跟踪法则弥补了这一缺陷。毛羽样本1、2、4和6的2种测试结果显示,毛羽跟踪法测得的毛羽长度相对于固定法的长度增长率,最大是666%,且固定长度分割法测得的4根毛羽是短毛羽,而毛羽跟踪法测得的是长毛羽,从图中可看出,毛羽跟踪法比固定长度割算法测得的毛羽长度更准确、更真实,尤其是对于长毛羽和有较多或较大的弯曲或卷曲形态的毛羽,其适用性更好。
4 结 语
本文在毛羽骨架图像的基础上,提出了用于毛羽骨架分析、毛羽路径确定以及毛羽长度测量的跟踪算法,有效地提取毛羽路径中的所有毛羽点信息,提高了长毛羽长度测量的准确性。与以往的毛羽固定长度分割法相比,毛羽形态信息提取全面,且毛羽长度的测量结果更接近真实毛羽长度,能更精确地反映出长毛羽的真实形态变化。通过长毛羽对比试验证明本文所提出的毛羽跟踪法具有较好的适用性,为将来实现毛羽的准确测量提供理论基础。
[1] BARELLA A. Yarn hairiness[J]. Textile Progress, 1983, 13(1):1-57.
[2] 姚穆. 纺织材料学[M]. 北京: 中国纺织出版社, 2009:192. YAO Mu. Material of Textile[M]. Beijing: China Textile & Apparel Press, 2009:192.
[3] HALEEM N, WANG Xungai. Recent research and developments on yarn hairiness[J]. Textile Research Journal, 2014, 85(2):211-224.
[4] 牟俊玲. 旋流喷嘴减少纱线毛羽的研究[D]. 无锡:江南大学, 2009:3-4. MOU Junling. Study of vortex nozzle to reduce yarn hairiness[D]. Wuxi: Jiangnan University, 2009:3-4.
[5] 章国红, 辛斌杰. 图像处理技术在纱线毛羽检测方面的应用[J]. 河北科技大学学报, 2016, 37(1):76-82. ZHANG Guohong, XIN Binjie. Application of image processingtechnology in yarn hairiness detection[J]. Journal of Hebei University of Sciences & Technology, 2016, 37(1):76-82.
[6] 方珩, 辛斌杰, 刘晓霞,等. 一种新型纱线毛羽图像特征识别算法的研究[J]. 河北科技大学学报, 2015, 36(1):63-72. FANG Heng, XIN Binjie, LIU Xiaoxia,et al. Research of novel method for measuring yarn hairiness based on image recognition[J]. Journal of Hebei University of Sciences & Technology, 2015, 36(1):63-72.
[7] 孙银银, 潘如如, 高卫东. 基于数字图像处理的纱线毛羽检测[J]. 纺织学报, 2013, 34(6):102-106. SUN Yinyin, PAN Ruru, GAO Weidong.Detection of yarn hairiness based on digital image processing[J]. Journal of Textile Research, 2013, 34(6):102-106.
[8] BLACHOWICZ T. Optical determination of yarn hairiness using statistical methods[C]// AUMANN S, PRUß B. 8th Aachen-Dresden International Textile Conference. Dresden: Institute of Electrical and Electronics Engineers, 2014:27-28.
[9] ROY S. Yarn hairiness evaluation using image process-ing[C]// SENGUPTA A, SENGUPTA S. 2014 International Conference on Control, Instrumentation, Energy and Communication. Calcutta: Elsevier Pub Co, 2014-01-31.
[10] FABIJANSKA A, JACKOWSKA-STRUMILLO L. Image processing and analysis algorithms for yarn hairiness determination[J]. Machine Vision and Applications, 2012, 23(3):527-540.
[11] WANG Rongwu, ZHOU Jinfeng, YU Lingjie, et al. Fusing multifocus images for yarn hairiness measure-ment[J]. Optical Engineering, 2014, 53(12):37-37.
Tracking measurement of yarn hairiness skeleton and length
SUN Yinyin1, ZHANG Ning2, WU Yang2, PAN Ruru2, GAO Weidong2
(1.SchoolofArts&GarmentsEngineering,ChangshuInstituteofTechnology,Changshu,Jiangsu215500,China;2.CollegeofTextileandClothing,JiangnanUniversity,Wuxi,Jiangsu214122,China)
Aiming at the defects on yarn hairiness measurement by the image process in the prior image methods, a new algorithm was proposed for analyzing hairiness and measuring hairiness length by tracking yarn hairiness skeleton. First, using 10 pixels as the step value, the dividing line of hairiness skeleton by the curves of yarn edge were plotted, and the hairiness starting points were obtained. And then, the upper 5-neighborhood points or lower 5-neighborhood points were judged in the extension direction of yarn hairiness, and the new hairiness path points were obtained. The all of path points were judged until no hairiness path points exist, all of which were recorded in sequence to generate a hairiness path, and the solutions of multi-hairiness path points and crossed hairiness were proposed. Finally, the pixel of two hairiness path points was calculated according to the distance between two points, and the hairiness measurement length was obtained. The results of tracking measurement and fixed segment measurement of long hairiness show that the measurement length can be increased by 24.3%-666% by the new method of yarn hairiness measurement using the hairiness tracking, and the measurement results are more accurate.
yarn hairiness; hairiness skeleton; hairiness length; tracking algorithm
10.13475/j.fzxb.20160803707
2016-08-09
2017-05-09
国家博士后基金项目(2013M541602);教育部博士点基金项目(20120093130001);霍英东教育基金会高等院校青年教师基金项目(141071)
孙银银(1984—),女,讲师,博士。主要研究方向为基于图像处理技术的纱线毛羽检测、服装外观品质、服装感性评价。高卫东,通信作者,E-mail:gaowd3@163.com。
TS 101.9
A