纱线毛羽路径匹配追踪检测
2022-09-22邓中民于东洋胡灏东
邓中民, 于东洋, 胡灏东, 李 童, 柯 薇
武汉纺织大学 省部共建纺织新材料与先进加工技术国家重点实验室, 湖北 武汉 430200)
纱线中毛羽的多少会直接影响纱线质量,对纱线后续织造加工产生影响,同时也会影响织物外观和手感[1-2]。目前,常用的毛羽评价指标有毛羽量、毛羽伸出长度、毛羽指数,对应的纱线毛羽检测方法有光电法和人工计数法[3]。由于毛羽形态的弯曲性和相互交叉性,光电法忽略了毛羽形态的影响造成检测结果不准确[4-5];人工计数法检测速率慢,耗费大量人力、物力。
随着计算机图像处理技术的发展,利用其对毛羽进行检测越来越普遍。孙银银等[6]提出的纱线毛羽骨架追踪方法以纱线条干上下分割线为起点,对多交点边判断边消除,得到不同长度毛羽数量,结果较为准确,但存在检测盲区,无法对重叠毛羽进行检测。吴珍[7]提出通过提取毛羽边缘进行追踪的方法,不受弯曲毛羽形态影响,检测速率快,但对交叉毛羽无法进行准确计算。Jing等[4]提出基于MRMRF算法,以纱线主干为基准进行检测的方法,但该方法无法检测弯曲毛羽长度。
为解决上述图像检测法中存在的缺陷,本文提出一种毛羽路径匹配追踪检测方法。即对毛羽骨干图像进行遍历获取毛羽起点,对毛羽点八邻域按不同情况进行判断实现毛羽追踪;在毛羽交叉部位通过选取毛羽交叉点前部分毛羽路径点,计算斜率并动态分配权重得到交叉区域毛羽斜度,以此来对多路径点进行匹配,找到最佳毛羽点实现毛羽路径匹配跟踪;最后依次记录毛羽路径得到毛羽总像素数,转化为毛羽的长度,实现毛羽长度检测。
1 纱线图像采集
本文实验采用RH2000视频显微镜采集纱线毛羽图像,选取纱线样本为29.5 tex棉纱。为保证采集纱线图像清晰、完整和具有参考性,采集图像分辨率为1 920像素×1 200像素,放大倍数为50倍;同时保证纱线位于相机视野中间,轴线保持水平,调整光源和焦距使毛羽图像清晰[8-9]。采集纱线图像如图1所示。

图1 原始纱线图像
2 纱线图像处理
2.1 图像预处理
由于纱线毛羽主干和采集过程中的噪点会对后续纱线毛羽的处理产生影响[10],为消除这些影响,利用MatLab图像处理软件对采集的纱线毛羽图像进行灰度化、滤波处理、OTSU图像分割、形态学运算,获取预处理毛羽图像[11-12]如图2所示。
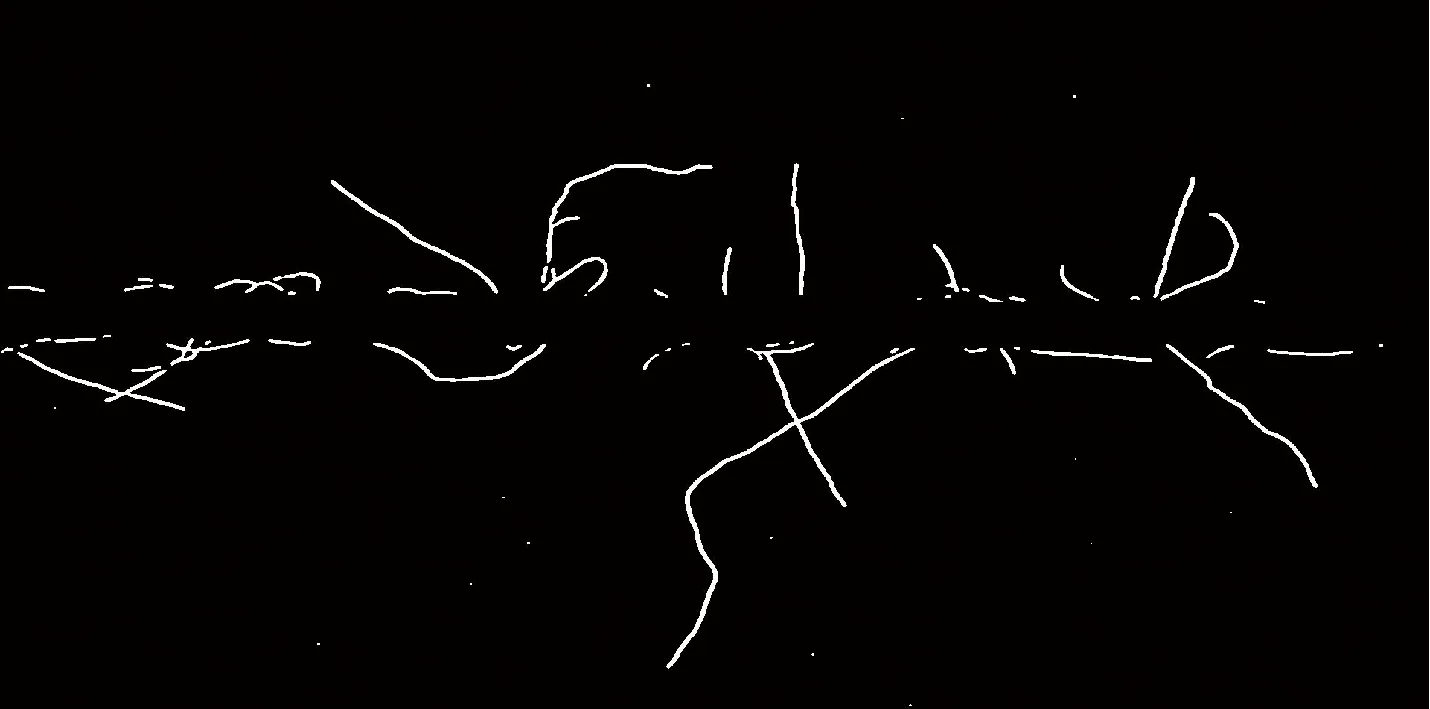
图2 预处理后纱线图像
2.2 毛羽骨干化处理
预处理后的毛羽图像中毛羽直径由多个像素点构成,运用本文提出的毛羽路径匹配追踪算法对毛羽进行追踪,需要对获取的预处理毛羽图像进行骨干化处理,获取以单个像素点为直径的骨干化毛羽图像。骨干化处理后毛羽图像像素值取反后图像如图3所示。
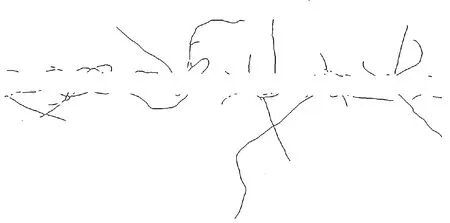
图3 取反后毛羽骨干化图像
3 毛羽路径追踪
3.1 毛羽起始点确定
实现毛羽骨架追踪,需要确定毛羽起始点位置。在毛羽骨干化图像矩阵中从上到下逐行进行遍历,以搜寻到各毛羽骨架第1个端点作为各毛羽起始点。毛羽追踪完成后,从该起始点位置继续向后遍历搜寻下一根毛羽起始点。起始点判定过程如下:1)从上到下逐行遍历毛羽骨架图像矩阵,找到像素值为1的像素点,记作B;2)对像素点B周围八邻域像素值为1的像素点个数进行判断,若像素点B八邻域中像素值为1的像素点个数为1个,则判定像素点B为毛羽起始点。
根据上述判断可以准确找到毛羽端点即毛羽起始点位置,避免以毛羽骨架中间某像素点作为起始点情况。
3.2 交叉区域多路径点匹配
毛羽形态弯曲多变、情况复杂,在毛羽交叉区域会出现多路径毛羽点情况(即交叉部位毛羽点八邻域中存在多个像素值为1 的新毛羽路径点),如图4中2根毛羽路径点[B(i),B(i+1),B(i+2),B(i+3),B(i+4),B(i+5)]和[A(j),A(j+1),B(i+3),A(j+2),A(j+3)]在交叉部位毛羽点B(i+3)周围出现多路径点情况。

图4 多路径毛羽点
为准确追踪毛羽路径点,需要根据毛羽走向确定多毛羽中正确的毛羽路径点。利用毛羽在交叉部位局部斜度对多路径毛羽点进行匹配进而确定下个毛羽路径点位置。通过统计该毛羽点前跟踪所得毛羽路径数量n,动态选取临近交叉点n/3的毛羽路径点,计算每2个相邻毛羽点B(i)和B(i+1)之间斜率,并按照毛羽点位置赋予斜率动态权重(p(i)):
式中:i为每2个相邻毛羽点序号;a为交叉点前n/3毛羽路径点数量。
由p(i)计算交叉匹配值(k),公式为
式中:y(i)和y(i+1)为选取的毛羽点在矩阵中的列值;x(i)和x(i-1)为选取的毛羽点在矩阵中的行值。
离交叉点越近分配的权重越大,进而得到毛羽交叉位置准确的毛羽斜度。计算毛羽点B(i+3)八邻域中未追踪毛羽点与B(i+3)的斜率,将得到的斜率和交叉匹配值k进行匹配,将斜率最接近交叉匹配值的毛羽点确定为下一个最佳毛羽点,实现交叉部位多路径点匹配追踪。
3.3 毛羽追踪
毛羽形态弯曲多变并伴随有交叉情况产生,造成毛羽追踪情况复杂,在毛羽追踪过程中会出现不同数量的新毛羽路径点情况。为准确追踪毛羽路径点,获取各毛羽骨架长度,根据毛羽路径实际情况,针对不同毛羽路径点数量需要提出不同方案进行处理,毛羽处理和判断流程如图5所示。
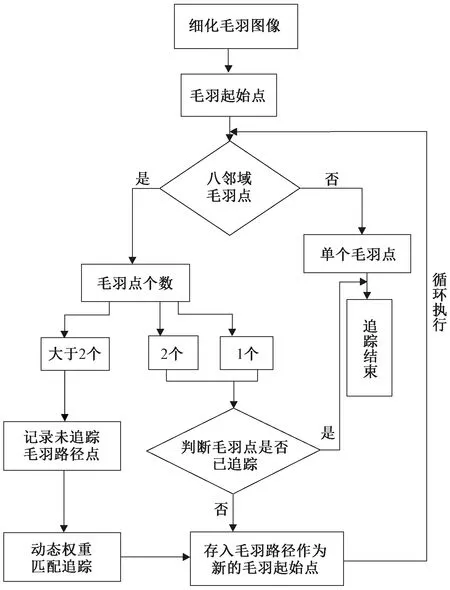
图5 毛羽追踪流程图
根据上述毛羽在不同情况下的判断流程对毛羽进行追踪,追踪过程如图6所示,图中×表示像素值为0。以图6(a)中毛羽点B作为毛羽起始点对八邻域像素点(a1,a2,a3,a4,a5,a6,a7,a8)进行判断。
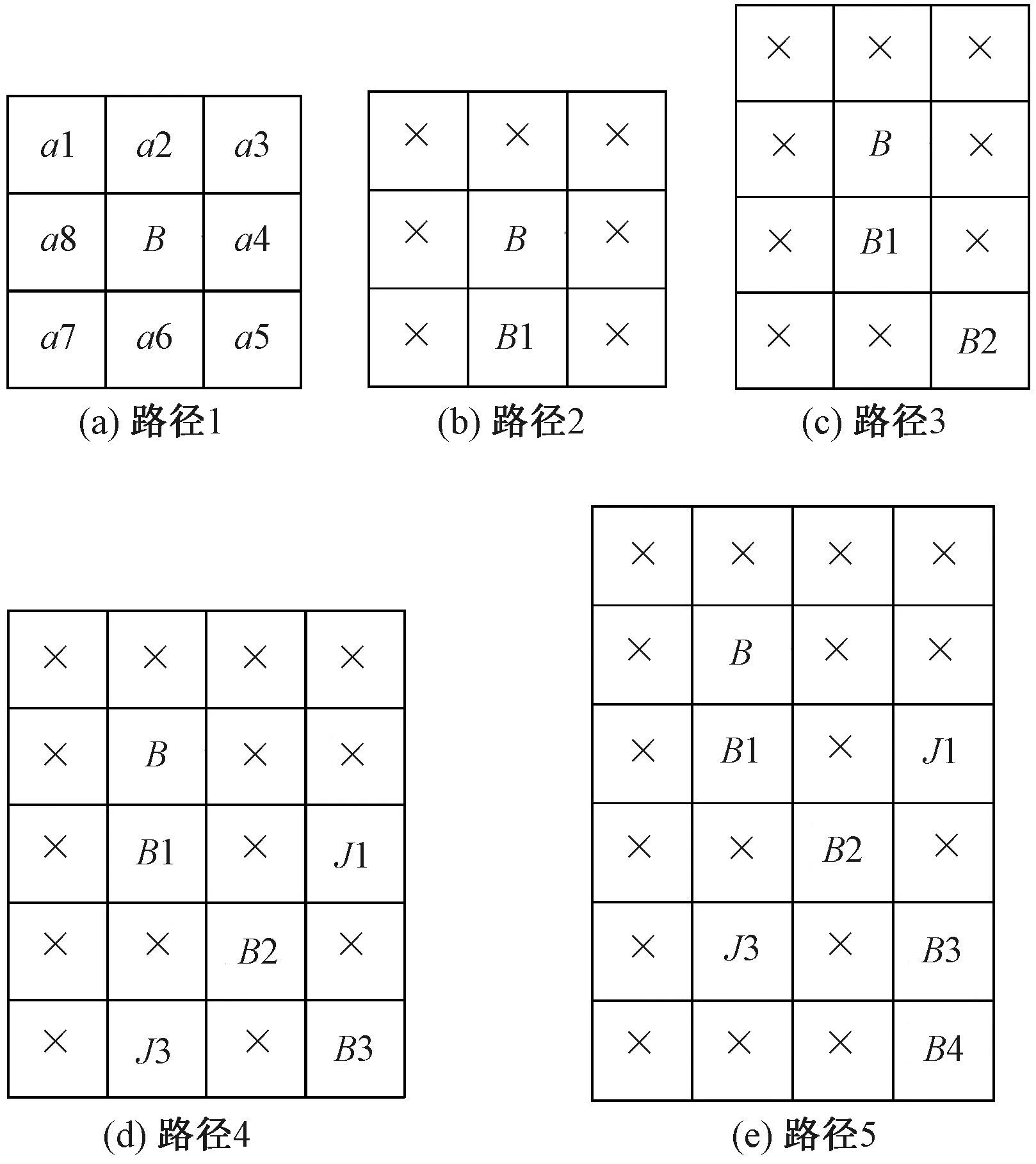
图6 毛羽路径
毛羽路径匹配追踪过程及追踪步骤如下。
1)从毛羽起始点B开始追踪,毛羽路径为[B],判断其八邻域位置像素点(见图6(b)),周围仅有1个像素点B1像素值为1,对比毛羽路径判断该像素点未被追踪,将该像素点作为下一个毛羽路径点,得到新毛羽路径为[B,B1]。
2)以毛羽路径点B1作为新的毛羽起始点,判断点B1八邻域得到2个像素点B和B2像素值为1(见图6(c)), 对比毛羽路径判断像素点B2未被追踪,是新的毛羽路径点,将该像素点作为下一个毛羽路径点,得到新毛羽路径为[B,B1,B2]。
3)以毛羽路径点B2作为新的毛羽起始点,判断点B2八邻域得到4个像素点(B1,J1,B3,J3)像素值为1(见图6(d)),判定B2毛羽点出现多路径点情况。对比毛羽路径判断像素点(J1,B3,J3)未被追踪,是新的毛羽路径点,对这3个像素点(J1,B3,J3)执行交叉区域路径匹配处理,计算3个像素点和B2点的斜率,与交叉匹配值k进行匹配,获取正确毛羽路径点B3,将该像素点作为下一个毛羽路径点,得到新毛羽路径为[B,B1,B2,B3]。
4)以毛羽路径点B3作为新的毛羽起点,判断点B3八邻域得到2个像素点(B2,B4)像素值为1(见图6(e)), 对比毛羽路径判断像素点B4未被追踪,是新的毛羽路径点,将该像素点作为下一个毛羽路径点,得到新毛羽路径为[B,B1,B2,B3,B4]。
5)以毛羽路径点B4作为新的毛羽起点,判断点B4八邻域得到1个像素点B3像素值为1,对比毛羽路径是已追踪像素点,无新的像素点,追踪结束,得到新毛羽路径为[B,B1,B2,B3,B4]。
追踪毛羽路径时,往往当前毛羽起始点周围出现多个新毛羽路径点,无法确定下一个毛羽路径点时,执行交叉区域路径匹配处理,确定下一个毛羽点位置。对于存在有3个像素点像素值为1的毛羽点路径情况如图7所示。

图7 B1邻域点
根据追踪步骤,当追踪到点B1时,以点B1为起始点,判断点B1八邻域得到3个像素点(B,J1,B2)像素值为1。判定B1毛羽点出现多路径点情况,对比毛羽路径判断像素点(J1,B2)未被追踪,是新的毛羽路径点,执行交叉区域路径匹配,确定下一个毛羽路径点B2,得到新毛羽路径为[B,B1,B2]。以B2为起始点重复上述判断过程得到多毛羽路径点最终毛羽路径为[B,B1,B2,B3,B4]。
统计追踪毛羽路径中毛羽点数量,即为毛羽像素数量,保留交叉部位八邻域存在有4个路径点情况的毛羽点,消除已追踪毛羽路径,从图像矩阵中上一根毛羽起始点位置开始向后搜寻下一个毛羽起始点,进行下一次毛羽追踪。
3.4 多重合交叉优化处理
毛羽交叉点的保留处理可以避免交叉毛羽产生中断,提高交叉毛羽检测准确性。针对毛羽交叉情况分析,毛羽图像中由于交叉位置像素的重叠性导致骨干化后,部分交叉会出现多重合交叉点情况,如图8所示。

图8 多重合毛羽点交叉
通过实例统计分析,毛羽在交叉部位重合像素数在14以内,针对这一特征提出交叉阈值来实现毛羽交叉区域毛羽点保留,进而处理单重合交叉点和多重合交叉点情况。在追踪毛羽时遇到一个交叉区域,从交叉位置开始标记毛羽路径点,限制标记毛羽路径点个数P在交叉阈值14内,如果标记毛羽路径点中有不小于2个为毛羽交叉点,则找到具有最大路径间距的2个毛羽交叉点,在毛羽追踪结束消除毛羽路径时,保留这2个交叉点之间的路径点。毛羽路径点个数为
式中:m为毛羽交叉区域第1个交叉点位置;j为在交叉阈值限制内最后1个毛羽点位置。
以N2作为交叉点交叉(区域如图9所示)进行交叉点优化处理。
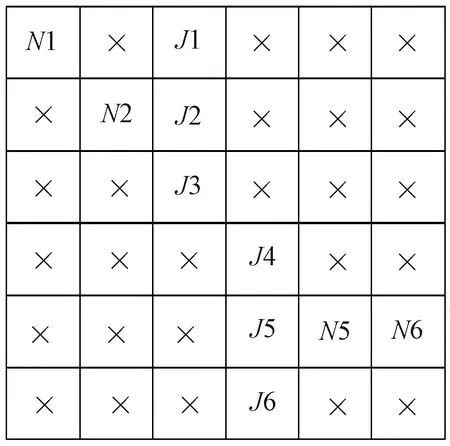
图9 交叉区域
当毛羽路径追踪到N2时,根据N2八邻域像素点数量判断为多路径毛羽点情况。从像素点N2开始标记毛羽路径点,标记个数限制在交叉阈值内,利用八邻域毛羽点数量和交叉区域路径匹配追踪,最终得到毛羽路径为[N1,N2,J3,J4,N5,N6],找到标记毛羽路径点中具有最大毛羽路径间距的2个毛羽交叉点N2和N5。追踪结束后对毛羽路径消除时保留毛羽点N2和N5之间毛羽路径点[J3,J4]。通过对交叉部位保留处理可提高检测准确性。
4 检测结果与分析
为检测测量结果的准确性,选取图3毛羽图像中4帧不同形态毛羽骨架,检测毛羽骨架中有交叉毛羽、回型毛羽和弯曲毛羽,如图10所示。

图10 毛羽样本
利用毛羽像素和图像分辨率的换算关系得到毛羽图像中每个像素点代表实际长度为0.004 mm,将路径匹配法检测的像素数量转化为毛羽长度;同时,选用基于投影法的苏州长风纺织机电科技有限公司CFH400毛羽仪和采集图像所用到日本浩视株式会社RH2000视频显微镜具有的二维测量工具作为人工法检测进行对比,结果如表1所示。
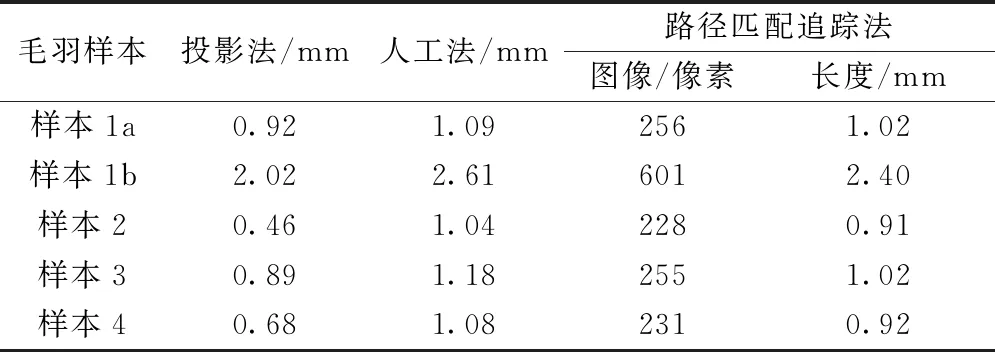
表1 毛羽长度检测结果对比
检测长度结果表明本文路径匹配追踪法测量的毛羽长度比投影法结果都要长,尤其对于样本1和2弯曲较多和样本4倾斜程度较大的毛羽,路径匹配追踪方法检测的毛羽长度与投影法检测毛羽长度相比差距最大。这是因为投影法测量的是毛羽的绝对长度,无法对弯曲毛羽进行准确统计[13-14],而本文的路径匹配追踪法对弯曲毛羽和交叉毛羽同样适用。从统计结果可以看出,毛羽路径匹配追踪检测的结果更符合毛羽真实长度。
为进一步验证本文方法的准确性,选取6 个纱线毛羽片段,每个纱线片段连续采集100 幅毛羽图像,每帧图像中纱线毛羽长度为10 mm,纱线实际长度为1 m,进行毛羽长度的统计,实验取6 次结果的平均值。本文路径匹配追踪方法与视频显微镜人工法检测和基于投影法的毛羽仪检测对比结果如表2、3所示。
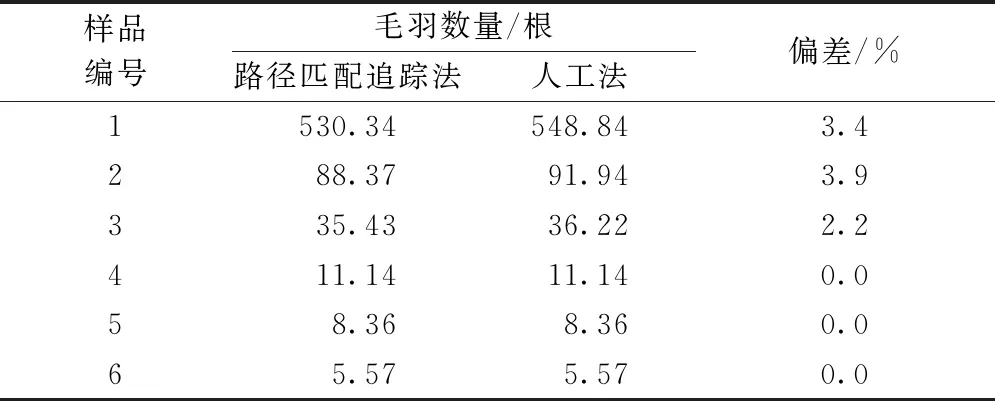
表2 路径匹配追踪方法与人工法检测结果对比
表2中以人工法作为毛羽实际长度基准,误差范围在4%以内。这是由于本文实验以图像实际水平长度和水平像素数量计算得到单位像素长度,而毛羽弯曲会造成毛羽路径中一部分相邻像素点呈非水平或垂直接邻,导致毛羽长度计算产生误差。当毛羽长度在4~6 mm范围内,由于毛羽长度统计通常按照向下取整处理,且本文实验选取样本中此长度范围内毛羽数量较少,从而使路径匹配追踪法和人工法测得结果接近。
表3中以路径匹配追踪法作为基准,对比投影法检测结果可知,毛羽路径匹配追踪法检测不同长度毛羽的数量都比投影法多。这是由于投影法无法对弯曲毛羽进行有效检测,对于弯曲越多的毛羽适应性越差;而路径匹配追踪法可对各形态毛羽路径进行准确追踪,尤其对较多弯曲和交叉毛羽更为适用,测得的毛羽长度更加真实和准确。
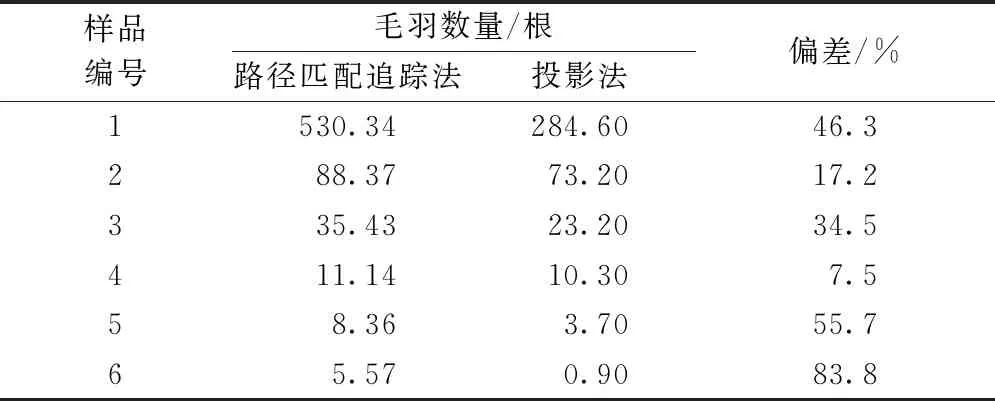
表3 路径匹配追踪方法与投影法检测结果对比
由于毛羽检测更多是在线检测技术,高效性是其检测方法能否广泛应用的基础,本文提出的毛羽追踪匹配算法检测时间与毛羽复杂度和计算机硬件有关。通过对本文方法检测单幅图像中10 mm实际毛羽长度时间进行统计发现,检测时间范围为0.4~1.2 s,可满足在线检测技术的使用要求;同时本文所提检测方法可有效检测出交叉毛羽和弯曲毛羽,提高纱线毛羽的检测准确度,具有可投入实际应用的前景。
5 结 论
本文基于图像处理技术提出的用于纱线毛羽长度检测的追踪算法,能够准确获取毛羽长度信息,相比于常规毛羽投影法和图像检测法,本文方法可消除弯曲毛羽检测不准确,毛羽交叉情况无法准确追踪毛羽路径的弊端,可以更加全面地反映纱线毛羽的分布情况,提高毛羽检测准确度。本文提出的纱线毛羽路径匹配检测结果与实际毛羽长度相近,检测时间具有高效性和可行性,可为将来设计纱线毛羽检测系统提供参考。