滚珠丝杠压扭型2D电液比例方向阀静态特性研究
2017-08-31陆倩倩
左 强 陆倩倩, 李 胜 阮 健
(1.浙江大学城市学院机械系, 杭州 310015; 2.浙江工业大学特种装备制造与先进加工技术教育部重点实验室, 杭州 310014)
滚珠丝杠压扭型2D电液比例方向阀静态特性研究
左 强1陆倩倩1,2李 胜2阮 健2
(1.浙江大学城市学院机械系, 杭州 310015; 2.浙江工业大学特种装备制造与先进加工技术教育部重点实验室, 杭州 310014)
针对直动式电液比例方向阀因比例电磁铁磁饱和造成流量无法做大的不足,提出了一种滚珠丝杠型2D电液比例方向阀。该阀利用压扭放大驱动技术放大电磁铁推力,通过静力分析,其放大系数为20,能克服摩擦力或卡紧力等非线性因素的影响。实验结果表明:压扭联轴器螺旋升角和力传递半径越大,压扭放大效果越明显;改变颤振幅值比改变频率对改善阀的静态特性影响明显;增大螺旋升角和力传递半径对阀的静态特性改善明显,在7 MPa系统压力下,该阀的滞环不超过3%,死区约为0.5%; 28 MPa系统压力下,流量可达190 L/min,死区约为2.8%,滞环小于5%,导控级泄漏约为0.2 L/min。理论研究与实验数据说明:该阀较传统的直动阀具有良好的静态特性和工程实用价值。
电液比例方向阀; 压扭联轴器; 滚珠丝杠型; 静态特性
引言
电液比例方向阀以其结构简单、对介质清洁度无特殊要求、制造成本低、可简化液压系统以及能耗低等特点,已成为电液比例控制系统中应用最广泛的基础元件之一[1-3],应用于悬挂农机调速、提升手柄控制系统和联合收获机割台高度控制系统等[4]。按照对功率级控制方式来分,比例方向阀可以分为直动式(单级阀)和先导控制式[5]。直动式比例方向阀是由电-机械转换器直接驱动功率级阀芯运动[6]。然而,由于伯努利效应,油液流经阀口会对阀芯作用一个液动力(也称伯努利力),该力的作用方面是趋向于阀口关闭,且大小与阀口的开口面积和压降乘积成正比,因而,直动式比例方向阀随着系统压力增大,阀的比例特性明显变差,甚至出现随着阀口压差增加通过比例阀的流量反而减小的不正常现象[7]。比例电磁铁受本身磁饱和影响,输出力有限,采用直动式比例方向阀无法从根本上解决高压、大流量下液动力影响的问题。
对高压大流量电液比例控制系统,必须采用先导式二级或多级比例方向阀[8]。ANDERSSION等[9]提出了一种流量反馈式二通导控流量阀,该阀的不足之处在于工作过程中导控级的泄漏流量较大。为此,权龙等[10]对该原理的比例阀进行了结构创新,使其适用于双向三通或四通比例换向阀的控制。LU[11]发明了二级力反馈比例流量阀,浙江大学流体传动及控制国家重点实验室提出了三级力反馈比例流量阀[12],该阀利用比例电磁铁的输出水平力特性与反馈弹簧力相平衡,实现主阀芯的位置反馈,配合精度要求较高。
由于压扭放大驱动技术使阀芯旋转不受轴向稳态液动力影响,且切向瞬态液动力极小[13-14],可以将其应用于液压阀设计[15-18]。本文拟设计滚珠丝杠压扭型2D(2维)电液比例方向阀,将导控级和主阀融为一体,通过压扭放大驱动技术实现位置反馈,并进行实验验证。
1 滚珠丝杠型2D电液比例方向阀工作原理
滚珠丝杠型2D电液比例方向阀的结构如图1所示。它由2D方向阀、滚珠丝杠型压扭联轴器(图2、图3)和比例电磁铁三者共轴联结。2D方向阀采用阀芯旋转和滑动的双自由度运动实现导控型电液比例方向阀功能。阀芯转动使液压阻力桥路输出压力发生变化,进而产生静压力驱动阀芯轴向运动。与2D伺服阀不同[19],2D方向阀感受通道为直槽,而不是螺旋槽,故2D方向阀本身不具有位置反馈功能,但结构更为简单。为保持阀芯的径向力平衡和提高抗污染能力,阀芯孔采用具有双余度液压阻力半桥控制。
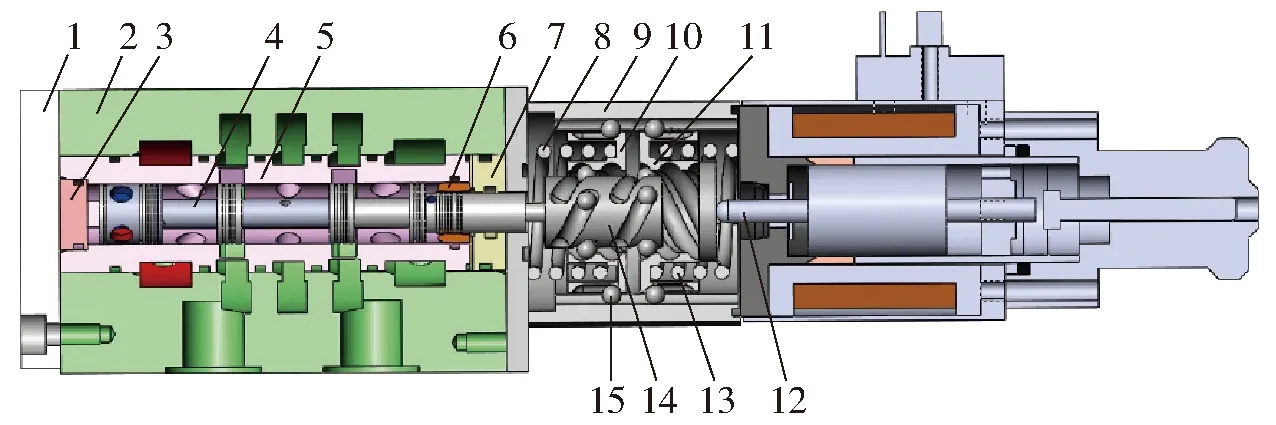
图1 滚珠丝杠型2D电液比例方向阀结构图Fig.1 Structure diagram of ball-screw type 2D electro-hydraulic proportional directional valve 1.阀后盖板 2.阀体 3.堵头 Ⅰ 4.阀芯 5.阀套 6.同心环 7.塞环8.复位弹簧 Ⅰ 9.套筒 10.压扭联轴器A段 11.压扭联轴器B段 12.比例电磁铁衔铁 13.复位弹簧 Ⅱ 14.压扭联轴器C段 15.钢球
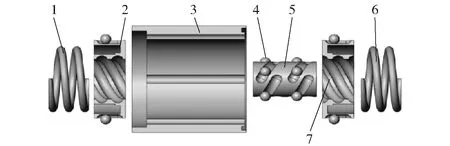
图2 滚珠丝杠型压扭联轴器三维爆炸图Fig.2 3D explosion diagram of ball-screw type pressure torsion coupling1.复位弹簧 Ⅰ 2.A段 3.套筒 4.滚珠 5.C段 6.复位弹簧 Ⅱ 7.B段

图3 滚珠丝杠型压扭联轴器关键零件Fig.3 Key parts of ball-screw type pressure torsion coupling1.直槽 2.螺旋槽 3.A段 4.B段 5.C段
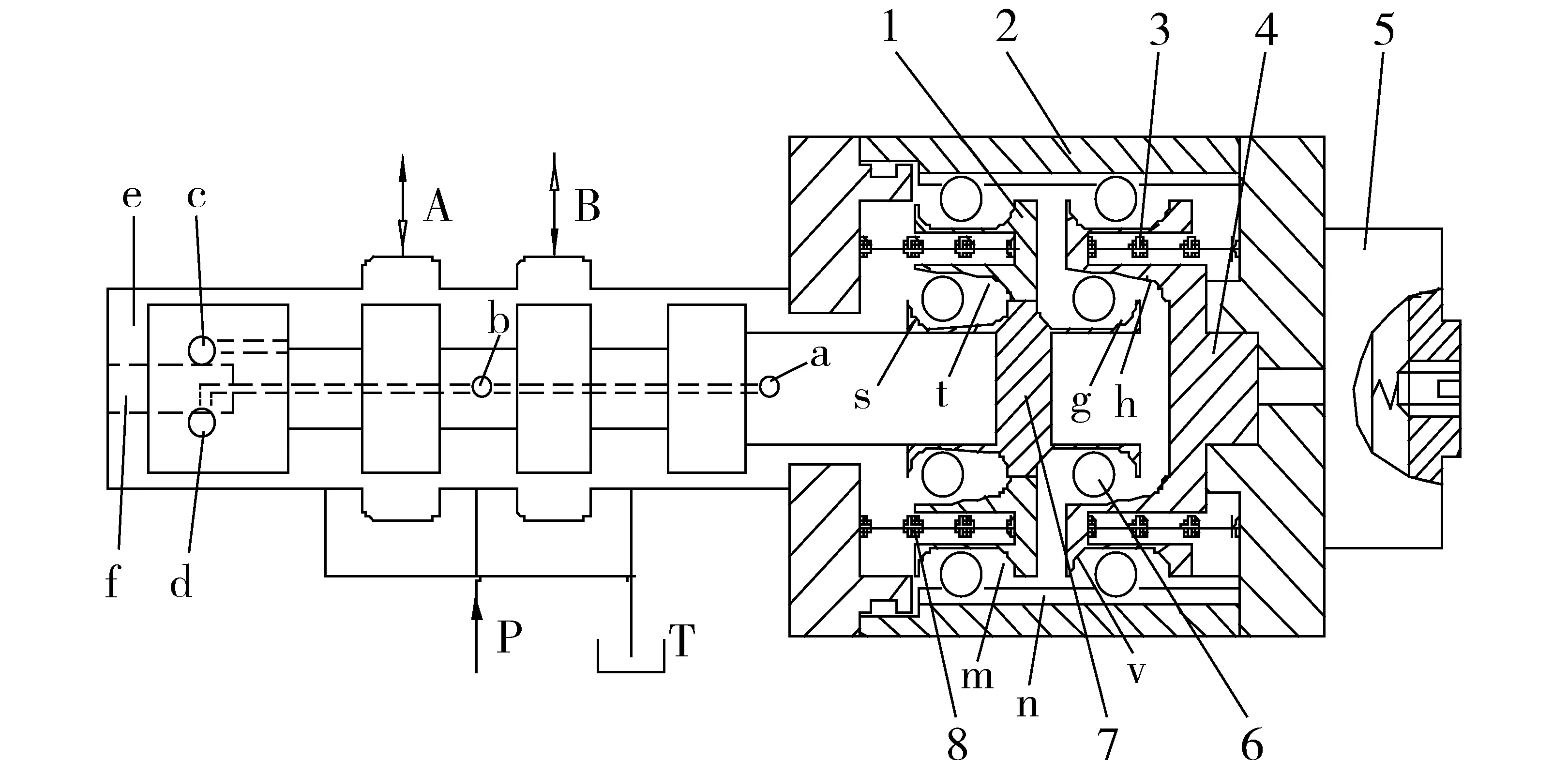
图4 滚珠丝杠型2D电液比例方向阀工作原理图Fig.4 Schematic of ball-screw type 2D electro-hydraulic proportional directional valve1.压扭联轴器A段 2.套筒 3.复位弹簧 Ⅰ 4.压扭联轴器B段 5.比例电磁铁 6.钢球 7.压扭联轴器C段 8.复位弹簧 Ⅱ
2D电液比例方向阀的工作原理如图4所示。2D方向阀右腔通过小孔a,经阀芯杆内通道和小孔b与进油P口(系统压力)相通,其截面积为左腔截面积的一半;左敏感腔e的压力由开设在阀芯左端台肩上的一对低压孔c和高压孔d与开设在阀芯孔内表面的感受通道f相交的2个微小弓形面积串联的液压阻力半桥控制。在静态时,复位弹簧Ⅰ和复位弹簧Ⅱ处于预紧状态,有效消除了钢球与滚道之间的间隙,此时,若不考虑摩擦力及阀口液动力的影响,低压孔c和高压孔d与感受通道f相交的弓形面积相等,左敏感腔e的压力为P口压力的一半,阀芯轴向保持静压平衡。在系统具有正常的工作压力时,2D电液比例方向阀运动分解图如图5所示,阀芯受液动力影响无法直接由电磁力推动,当比例电磁铁线圈电流加大产生向左推力时,钢球在直槽n和直槽v之间滚动,使压扭联轴器B段受径向约束,同时只能向左移动Δδ位移,此时,通过螺旋滚道h和螺旋滚道g之间的钢球作用,压扭联轴器B段再驱动压扭联轴器C段逆时针(面对阀芯伸出杆)转动Δθ。由于阀芯与压扭联轴器C段固联,则低压孔c弓形面积增大、高压孔d弓形面积减小,左敏感腔e压力降低,使阀芯两端压力不平衡,并且在压扭联轴器A段螺旋滚道t和C段螺旋滚道s之间的钢球作用下,压扭联轴器C段将螺旋向左前进,直至C段顺时针(面对阀芯伸出杆)转回Δθ,由于螺旋滚道s、t、g和h的螺旋升角相同,则A段和C段向左位移必将也是Δδ,与比例电磁铁输入位移相同,此时,低压孔c、高压孔d与感受通道f相交的弓形面积则相等,阀芯重新平衡。同理,当电流减小,弹簧恢复产生向右拉力时,阀芯将向右移动,2D电液比例换向阀的控制信号流程图如图6所示。
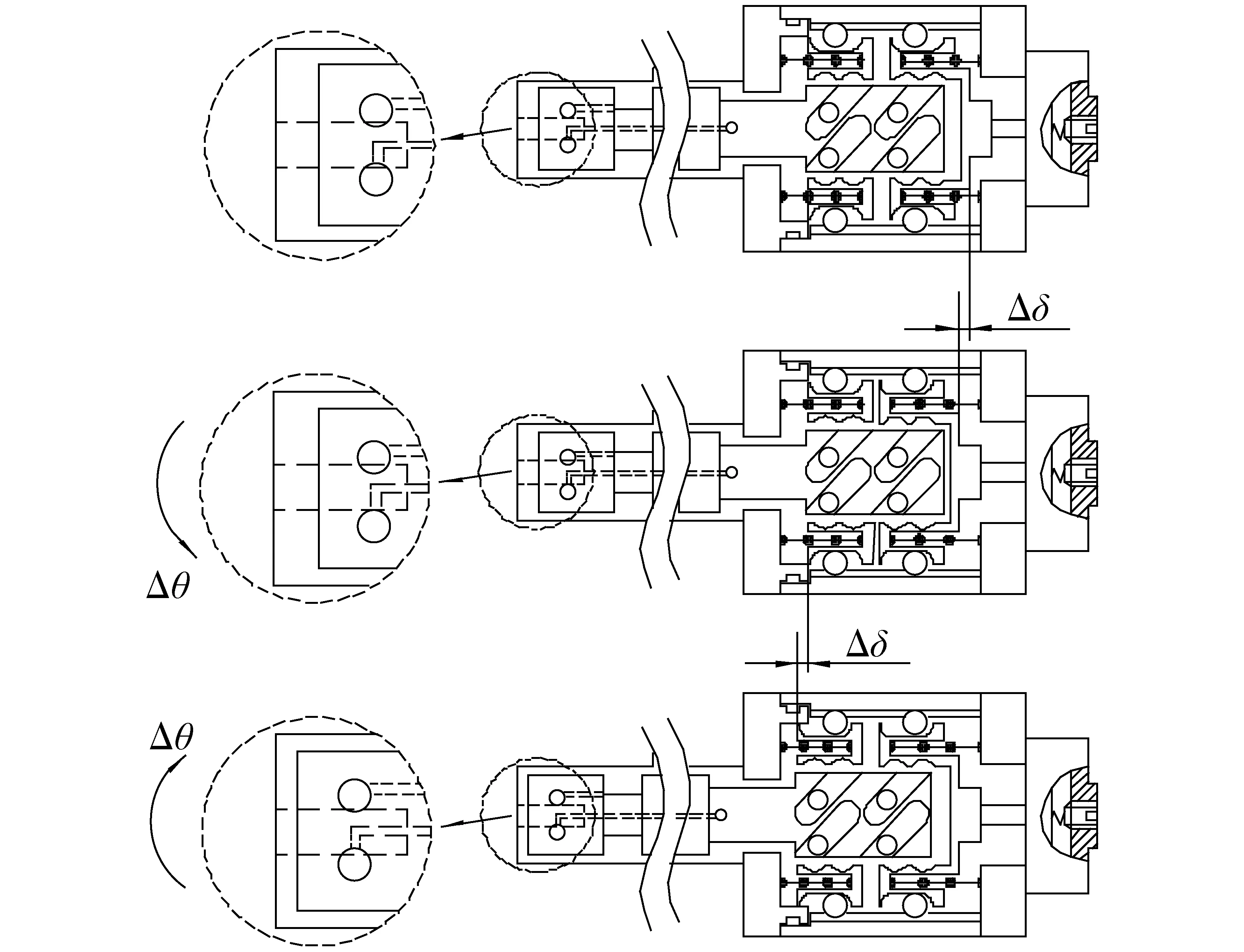
图5 滚珠丝杠型2D电液比例方向阀运动分解图Fig.5 Motion diagram of ball-screw type 2D electro-hydraulic proportional directional valve

图6 滚珠丝杠型2D电液比例换向阀的控制信号流程图Fig.6 Control signal flow chart of ball-screw type 2D electro hydraulic proportional directional valve
2 滚珠丝杠型压扭联轴器静力计算
图7是围绕中心轴线展开的机构受力图。滚珠丝杠副通过滚珠进行载荷传递,且一般只承受轴向载荷,但由于螺旋滚道存在一定的加工误差等原因,在各个滚珠上分配的载荷并不是均匀的,现为了计算方便,假设其为理想情况,各个滚珠上分配的轴向载荷均匀,且法向力的合力通过丝杠轴线。

图7 展开机构受力图Fig.7 Force diagram of mechanism deployment1.压扭联轴器B段 2.压扭联轴器C段 3.滚珠 4.压扭联轴器A段
由于压扭联轴器A段和B段轴向作用力对压扭联轴器C段的扭转为反效果,取A段、B段和C段为整体分析。计算公式为
Fm=F1+F2-f1-F5-f2=
(1)
式中Fm——压扭联轴器C段产生扭矩效果的轴向合力
F1——比例电磁铁推力
F2——压扭联轴器B段预紧力
F5——压扭联轴器A段预紧力
f1——压扭联轴器B与套筒间摩擦力
f2——压扭联轴器A与套筒间摩擦力
pc——敏感腔压力ps——系统压力
xv——阀芯位移
mt——折算到阀芯上的总质量
Be——折算到阀芯上的总粘性系数
KL——弹性负载刚度
FL——任意负载力
A——阀芯端面面积
(2)
式中M——压扭联轴器C段输出扭矩R——联轴器力传递半径β——螺旋升角θ——阀芯转角η——机构传动效率xm——轴向输入位移
当β>45°,压扭联轴器起到增力的效果。因此,螺旋升角是影响压扭联轴器力放大效果的主要参数。当机构的轴向输入行程xm一定时,螺旋升角β设计得越大,输出扭矩M越大,输出转角θ越小。当螺旋升角β等于滚动摩擦角时,机构传动效率η为0,随着β的增大,其机构传动效率可升至0.98。
为进一步说明压扭放大消除阀芯摩擦力的效果,定义力放大系数kf为阀芯圆柱表面驱动力Fθ与压扭联轴器C段产生扭矩效果的轴向合力Fm之间比值,导阀的开口y为阀芯转角θ所对应的孤长。
(3)

(4)
从液压系统分析,将主阀芯理解为液压缸活塞,导控级可理解为三通阀控缸,从导控级压力增益经验得知,导阀的最大开口转角幅度初步为2.4°,对应弧度设计为0.1 mm,此时比例电磁铁的最大行程为2 mm。因此,在阀芯运动因为受卡紧力或摩擦力等非线线阻力不能工作时,力放大系数kf的值为20,能极大地克服卡紧力或摩擦力等非线性因素对比例特性的影响。
由于比例电磁铁运动行程较短,滚珠受滚道压迫过程中,一方面将沿着滚道切线方向运动,另一方面还会产生绕接触点公法线的自旋运动,虽然旋转的角度不大,但在一定频响运动中,这种自旋运动对润滑油膜的形成和摩擦力矩的大小有着重要的影响。参照轴承分析的方法[20],可定义滚珠自旋运动的角速度与滚动角速度之比为旋滚比,且比值越小,滑动程度越轻。
由于制造几何误差,滚珠与滚道必然存在一定的间隙,故安装对中弹簧时,两边弹簧各施加了一定预紧力,同时预紧力也将产生摩擦力矩。为了计算滚珠丝杠型压扭联轴器中点接触压力与变形,可通过Hertz接触理论,参考Hertz点接触特征,分析滚珠与滚道的接触特性,是分析滚珠丝杠型压扭联轴器性能的基础。
实验中的滚珠丝杠型压扭联轴器为3D打印成型,材料为具有粘弹性的尼龙树脂,当刚性的滚珠在滚道滚动时,由于滚道螺旋面恢复变形的弹性迟滞,滚珠两侧弹性接触力将各不相同,如图8所示,进而形成了滚珠滚动的阻力矩。
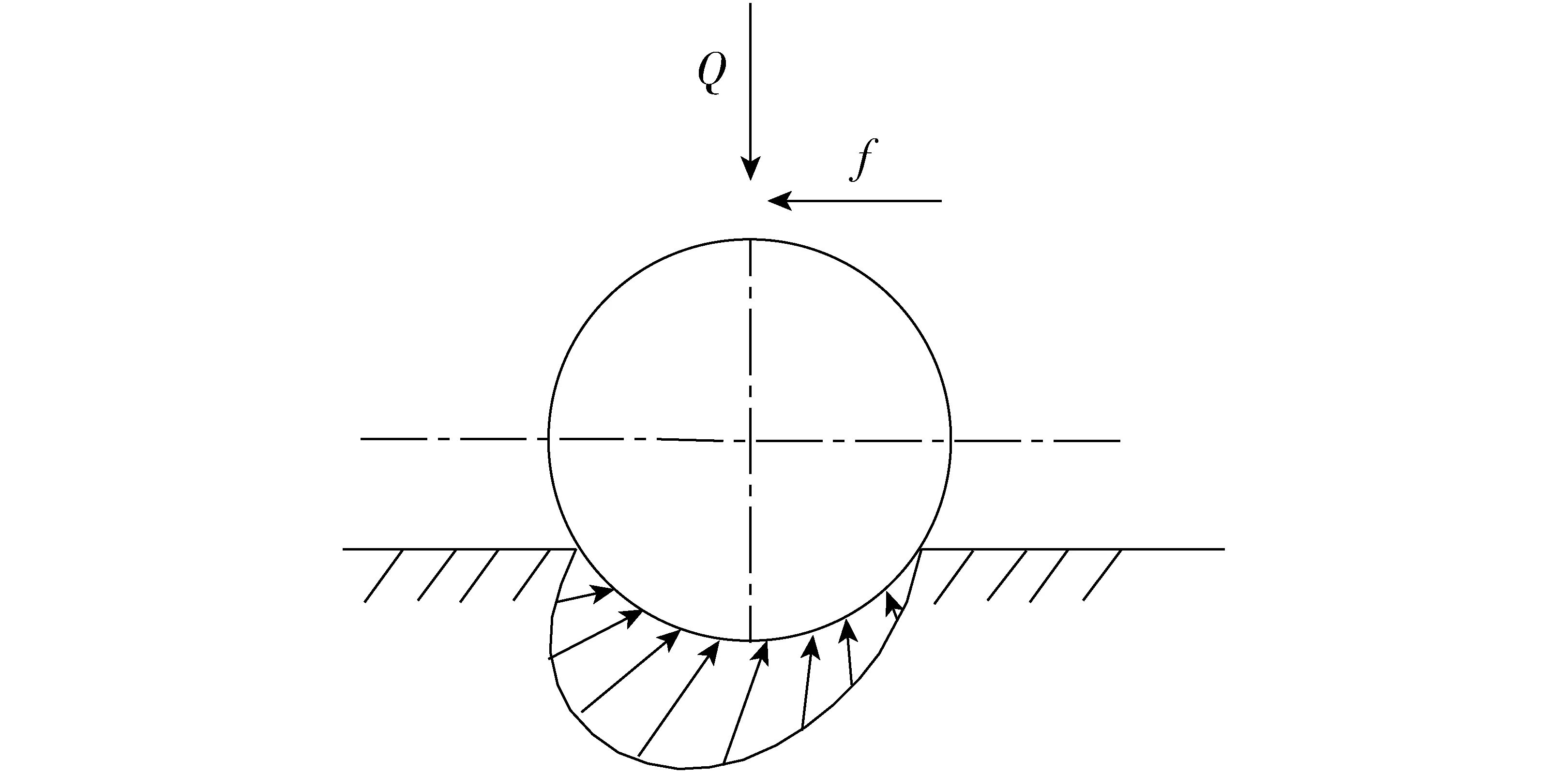
图8 弹性滞后引起的摩擦阻力Fig.8 Friction resistance caused by elastic hysteresis
单个接触点处由弹性滞后所形成的摩擦力矩可表示为
(5)
式中Me——摩擦力矩Q——载荷b——椭圆的短半轴长度E′——等效弹性模量γ——弹性滞后系数ρ——曲率半径
由式(5)可以看出,弹性滞后引起的摩擦力矩受接触椭圆的短半轴长度b、材料的弹性滞后系数γ以及载荷Q影响较大。实验表明接触椭圆的短半轴长度b主要受滚道参数影响,弹性滞后系数γ与材质有关,对于轴承钢,γ取0.007~0.009。
3 滚珠丝杠型压扭联轴器静态特性实验
由于滚珠丝杠具有高精度、高效率、高刚度和运行平稳等特点,非常适合在精密机械中使用。适当改变螺旋槽的螺旋升角,可输出很大的扭矩,在克服高压大流量时阀芯所受的液动力方面具有一定的优势。利用滚珠实现全滚动摩擦,传动效率高且传动零件数少,结构简单,尺寸小,完全可以嵌入电液比例换向阀中使用。为了消除滚珠与滚道之间间隙,可通过弹簧施加一定的预紧力。
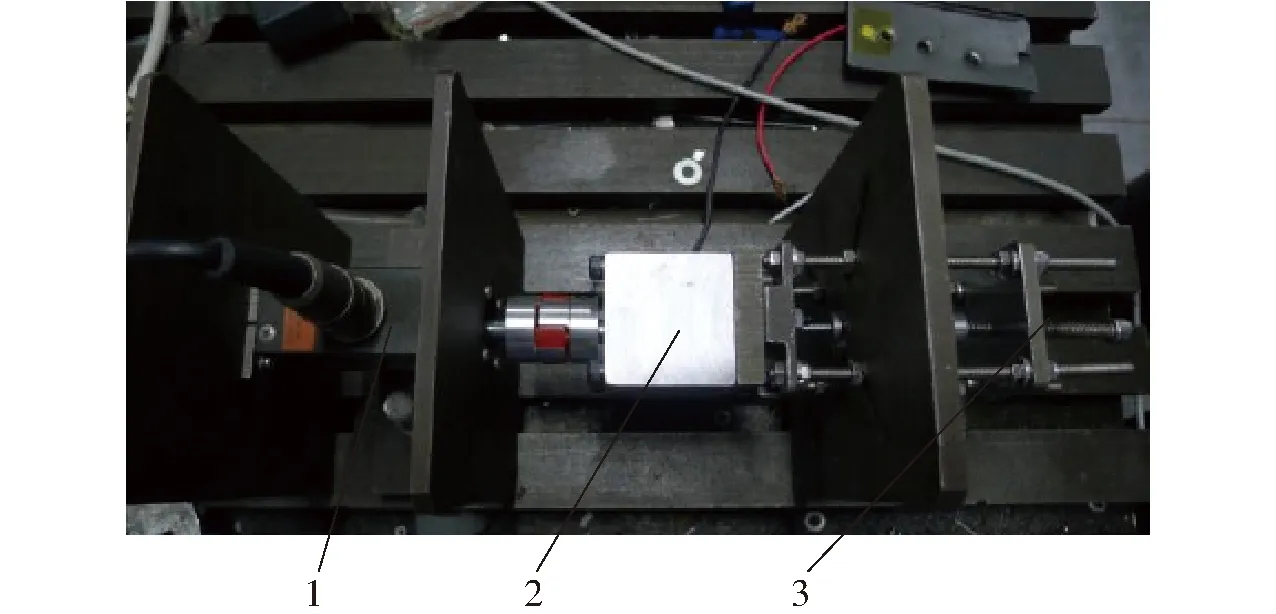
图9 压扭联轴器扭转刚度实验装置Fig.9 Torsional stiffness test of compression torsion coupling1.扭矩传感器 2.压扭联轴器 3.加载装置
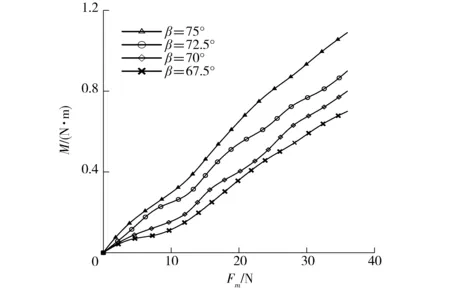
图10 不同螺旋升角下的输入力-输出扭矩关系曲线Fig.10 Relationship curves between input force and output torque under different helix angles
2D电液比例方向阀为位置反馈结构,压扭联轴器需要有足够的扭矩输出来克服摩擦力使阀芯旋转,以形成其与导控级构成的位置反馈。所以,压扭联轴器的压-扭转换效果对于阀的性能至关重要,图9为压扭联轴器扭转刚度实验装置图。从力-扭矩转换效果而言,以上理论分析可以证明,压扭联轴器只要选择合适的参数,就可以达到良好的压-扭转换效果。图10、11为不同螺旋升角下的输入力-输出扭矩关系曲线和输入位移-输出扭矩关系曲线。

图11 不同螺旋升角下的输入位移-输出扭矩关系曲线Fig.11 Relationship curves between input displacement and output torque under different helix angles
如图10所示,当螺旋升角β越大,输出扭矩M越大。但不得不考虑几何关系约束,螺旋升角β越大,输出转角θ越小,因此,在阀芯旋转角度θ范围内,螺旋升角β越大越好。由于电磁铁磁饱和、摩擦力和卡紧力等非线性因素影响,输入电磁力并不完全和位移成正比,如图11所示,输入位移-输出扭矩关系可以在排除电磁铁影响下,更加精准地反映出压扭联轴器的压扭放大效果。在位移起始阶段,由于非线性因素(例如静摩擦力和惯性)影响更为明显,输入位移-输出扭矩的压扭效果比输入力-输出扭矩的压扭效果更佳,但总体趋势和图10基本相同。

图12 不同力传递半径下的输入力-输出扭矩关系曲线Fig.12 Relationship curves between input force and output torque under different transfer force radius
图12为不同力传递半径下的输入力-输出扭矩关系曲线,力传递半径R越大,其扭矩放大效果越明显,但是,电磁铁输入位移xm有限,力传递半径R过大,其输出转角θ将过小。同理,为了更加精准地反映出压扭联轴器的压扭放大效果,测试了在不同力传递半径下的输入位移-输出扭矩关系曲线,如图13所示。在考虑力传递半径影响时,输入位移-输出扭矩的压扭效果比输入力-输出扭矩的压扭效果更佳,但总体趋势和图12基本相同。
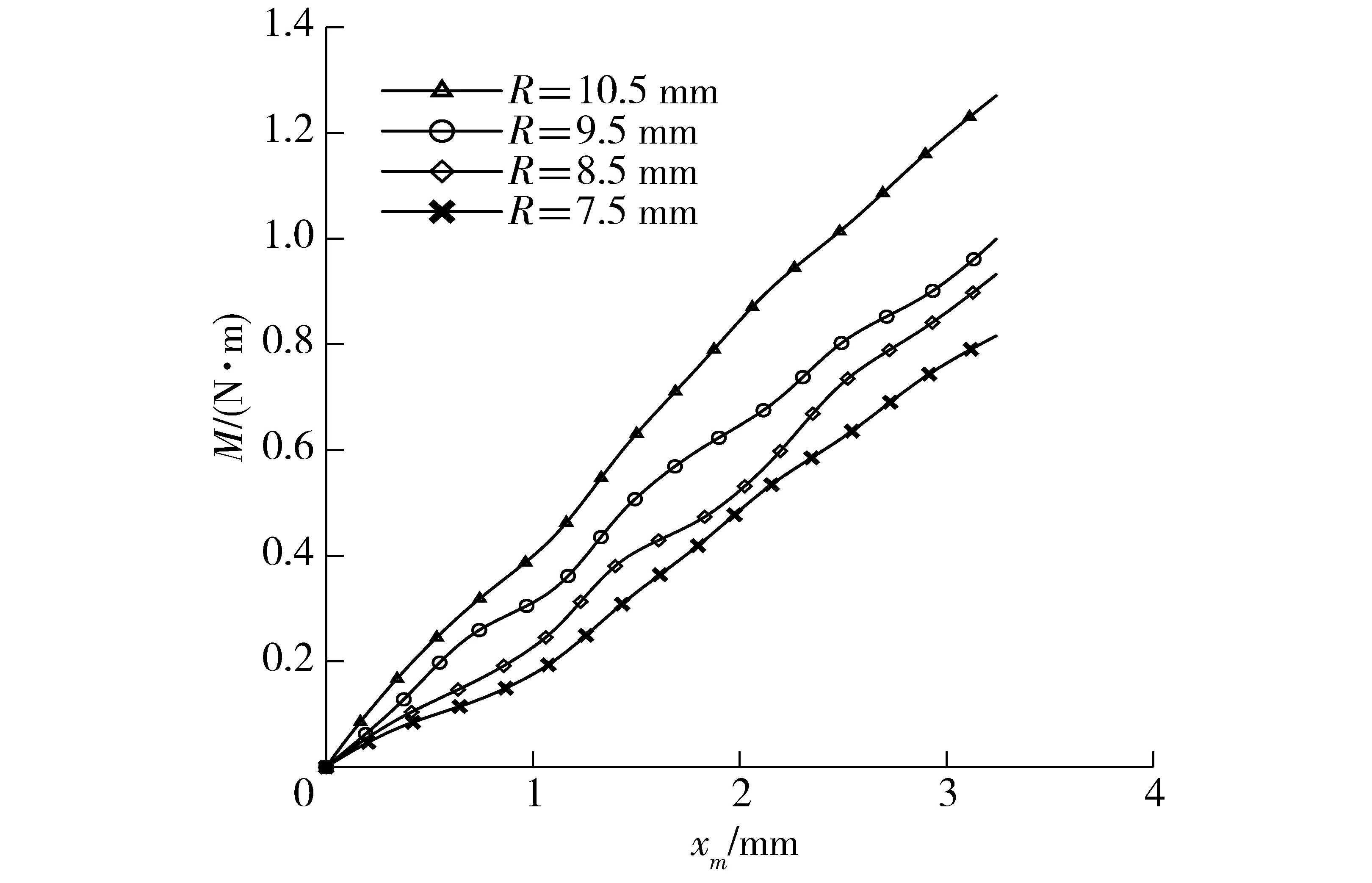
图13 不同力传递半径下的输入位移-输出扭矩关系曲线Fig.13 Relationship curves between input displacement and output torque under different transfer force radius
4 滚珠丝杠型2D电液比例方向阀静态特性实验
由于市面上最大的直动式比例阀为6通径,为说明滚珠丝杠型2D电液比例方向阀采用直动式结构的可行性,实验选取10通径的滚珠丝杠型2D电液比例方向阀,测试平台如图14所示,测试所使用的流量计型号为VS 4型,量程为300 L/min,精度为0.3%,重复精度为±0.05%。激光位移传感器测试阀芯位移,最高分辨率可达7 μm,保证了测量的精确度。比例电磁铁型号为GP45-4-A型,额定行程为3 mm。实验时,信号发生器发出所需要的控制信号送给比例电磁铁控制器,通过叠加一定的颤振信号,用示波器记录实验结果,试验回路如图15所示,在测试阀空载流量特性曲线时,打开截止阀1号、2号和3号,关闭截止阀4号和5号。

图14 滚珠丝杠型2D电液比例方向阀测试平台Fig.14 Test platform of ball-screw type 2D electro-hydraulic proportional directional valve

图15 滚珠丝杠型2D电液比例换向阀的试验回路Fig.15 Test circuit of ball-screw type 2D electro hydraulic proportional directional valve1.油箱 2.泵 3.截止阀1号 4.截止阀2号 5.截止阀3号6.样阀 7.截止阀4号 8.流量计 9.截止阀5号 10.安全阀
实验时,为消除滚珠与滚道之前的间隙,压扭联轴器中两端对中弹簧在安装时施加15 N的预紧力,对应于比例电磁铁起始电流0.1 A输出的电磁推力。在系统压力为7 MPa时,阀的静态特性实验结果如图16~20所示。如图16所示,在一定程度上增大颤振幅值,将使死区和滞环明显减小,同时阀的线性度大有改善。如图17所示,在一定程度上增大颤振频率,死区和滞环改善不明显,但对阀的线性度有一定改善。如图18所示,螺旋升角β越大,其力放大效果越明显,所需要的电流越小,通过叠加合适颤振后,阀的空载流量特性曲线非线性度较好,滞环不超过3%,死区约为0.5%。如图19所示,力传递半径R越大,其力放大效果越明显,所需要的电流越小,通过叠加合适颤振后,阀的空载流量特性曲线非线性度较好,滞环不超过3.5%,死区约为0.6%。
为充分说明阀流量特性与压扭联轴器输入信号之间的关系,实验同时记录了阀芯位移、空载控制流量与压扭联轴器输入位移信号,三者关系如图20所示。在阀流量可控的情况下,实线部分曲线充分说明了阀芯位移与压扭联轴器输入位移之间具有较好的连续跟踪一致性,且比例电磁铁的衔铁与压扭联轴器输入端(B端)固联,阀芯与压扭联轴器输出端(C端)固联,因此,只要保证比例电磁铁输出位移滞环较小,即可保证阀芯位移滞环较小。
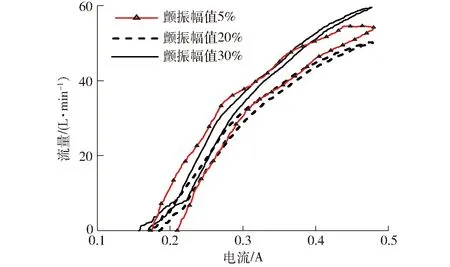
图16 不同颤振幅值对应的流量滞环Fig.16 Corresponding hysteresis loops in case of different amplitudes

图17 不同颤振频率对应的流量滞环Fig.17 Flow hysteresis loops with different flutter frequencies
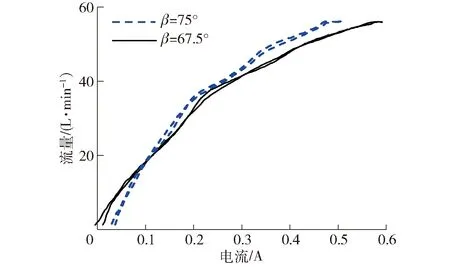
图18 不同螺旋升角对应的流量滞环Fig.18 Flow hysteresis loops corresponding with different helix angles

图20 阀芯位移、空载控制流量与压扭联轴器输入位移关系曲线Fig.20 Relationship between spool displacement, no-load control flow and input displacement of compression and torsion coupling
为验证该阀可实现高压大流量控制,使系统压力为28 MPa,在颤振幅值为20%,颤振频率为20 Hz情况下,测试其滞环特性如图21所示。在阀芯起始运动时,由于复位弹簧的预紧力和径向静摩擦力影响,测得死区约为2.8%;由于购买的GP45-4-A型比例电磁铁本身最大滞环约为3%,在叠加了一定颤振信号后,测得该阀最大滞环小于5%,最大控制流量为190 L/min左右。传统的直动式电液比例方向阀,在28 MPa的系统压力下,由于稳态液动力的影响,阀口几乎不能打开。零位泄漏实验时,关闭截止阀1、2、3号,打开截止阀4、5号,泄漏特性如图22所示。先导级泄漏极小,约为0.2 L/min,表明了该阀导控级控制性较好;主阀零位泄漏小于9 L/min,主要是设计时考虑到该阀的动态特性,故主阀零位泄漏相对较大。

图21 系统压力28 MPa时阀空载流量特性Fig.21 Valve pressure flow characteristics at system pressure of 28 MPa

图22 系统压力28 MPa时泄漏特性Fig.22 Leakage characteristics at system pressure of 28 MPa
5 结论
(1)在阐述了滚珠丝杠型2D电液比例方向阀工作原理和结构的基础上,对滚珠丝杠型压扭联轴器进行了静力分析,其力的放大系数为20,能极大地克服传递中存在的摩擦力或卡紧力等非线性因素的影响。同时,实验验证了螺旋升角和力传递半径越大,压扭联轴器压扭放大效果越明显。
(2)实验表明:改变颤振幅值对改善阀的静态特性影响明显,改变颤振频率对改善阀的静态特性影响不大。增大压扭联轴器螺旋升角和力传递半径对阀的静态特性改善明显,在7 MPa系统压力下,调节设计参数,该阀的最大滞环不超过3%,死区约为0.5%。系统压力为28 MPa时,测得最大控制流量达190 L/min,死区约为2.8%,最大滞环小于5%,导控级泄漏极小,约为0.2 L/min,主阀零位泄漏小于9 L/min。
(3)论证了滚珠丝杠型压扭联轴器应用于2D电液比例方向阀的可行性。该阀利用压扭放大驱动技术将比例电磁铁对阀芯的驱动力放大,不仅具有直动阀结构简单的优点,而且具有导控阀控制压力高和流量大的优点。
1 CRISTOFORI D, VACCA A. The modeling of electrohydraulic proportional valves[J]. Journal of Dynamic Systems Measurement and Control,2012,134(3):1-13.
2 王庆丰,魏建华,吴根茂,等. 工程机械液压控制技术的研究进展与展望[J]. 机械工程学报,2003, 39(12):51-56. WANG Qingfeng, WEI Jianhua, WU Genmao, et al. Progress and prospects in the researcher of hydraulic control for construction machinery[J]. Chinese Journal of Mechanical Engineering, 2003, 39(12):51-56.(in Chinese)
3 满在朋, 丁凡, 刘硕,等. 大流量电液控制阀设计与试验 [J/OL]. 农业机械学报,2015,46(1):345-351.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150148&flag=1. DOI:10.6041/j.issn.1000-1298.2015.01.048. MAN Zaipeng, DING Fan, LIU Shuo,et al. Design and experiment on large-flow-rate electro-hydraulic control valve[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(1):345-351.(in Chinese)
4 朱剑,尹文庆,谢蓓. 基于嵌入式的电液比例控制系统在联合收割机割台高度控制中的应用[J].液压与气动, 2012(1):83-86. ZHU Jian, YIN Wenqing, XIE Bei. The application of embedded electro-hydraulic proportional control sysytem for combine harvesters header height control[J]. Chinese Hydraulics & Pneumatics, 2012(1):83-86. (in Chinese)
5 吴根茂,邱敏秀,王庆丰,等. 实用电液比例技术[M]. 杭州:浙江大学出版社,2006.
6 AMIRANTE R, MOSCATELLI P G, CATALANO L A. Evaluation of the flow forces on a direct (single stage) proportional valve by means of a computational fluid dynamic analysis[J]. Energy Conversion and Management, 2007,48(3):942-953.
7 VANGHAN N D, GAMBLE J B. The modeling and simulation of a proportional valve[J]. ASME Journal of Dynamic Systems, Measurement and Control, 1996,118(1):120-125.
8 LU Yongxiang. Entwicklung vorgestenerter proportional ventile mit 2-weg—einbauventile als stellglied und mit gerateinterner rnuokfuhrnng[D]. Aachen: RWTH Aachen, 1981.
9 ANDERSSION B, ANDREW D, MARTIN A. Vickers new technologies applied to electronic hydraulic controls[C]∥SAE International Off-highway and Powerplant Congress and Exposition, 1996:71-76.
10 QUAN Long, XU Xiaoqing, YAN Zheng, et al. A new kind of pilot controlled proportional direction valve with internal flow feedback[J]. Chinese Journal of Mechanical Engineering,2010,23(1): 60-65.
11 LU Yongxiang. Betriebeverhalter vorgesteuerter 2-wege—stromregeventile under schiedlicher Bauform[J]. International Journal of Fluid Power, 1981, 125 (9): 703-708.
12 WU Genmao. Research on static and dynamic performance of 2 proportional throttle valve with displacement force feedback[C]∥1th ICFP, 1985: 273-290.
13 RUAN J, BURTON R, UKRAINETZ P. An investigation into the characteristics of a two dimensional“2D”flow control valve[J]. Journal of Dynamic Systems, Measurement, and Control,2002,124(1): 214-220.
14 裴翔, 李胜, 阮健. 转阀阀芯卡紧现象的分析及减小措施[J]. 机床与液压,2000(5):74-78. PEI Xiang, LI Sheng, RUAN Jian. The analysis and improvement of spool clamping for rotary valve[J].Machine Tool & Hydraulics,2000(5):74-78. (in Chinese)
15 李胜, 阮健, 孟彬. 二维电液比例换向阀动态特性及稳定性分析[J]. 机械工程学报, 2016, 52(2):202-212. LI Sheng, RUAN Jian, MENG Bin. Two-dimensional electro-hydraulic proportional directional valve[J]. Journal of Mechanical Engineering, 2016, 52(2):202-212. (in Chinese)
16 刘国文, 阮健, 左希庆,等. 滚轮压扭型 2D 电液比例方向阀特性分析[J/OL]. 农业机械学报, 2016, 47(5):401-406.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160555&flag=1.DOI:10.6041/j.issn.1000-1298.2016.05.055. LIU Guowen, RUAN Jian, ZUO Xiqing, et al. Characteristic analysis of 2D electro-hydraulic proportional directional valve with roller thrust-torsion coupling [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5):401-406. (in Chinese)
17 刘国文, 李胜, 阮健, 等. 双向压扭联轴器滞环颤振补偿技术研究[J/OL]. 农业机械学报, 2015, 46(6):349-354.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150650&flag=1.DOI:10.6041/j.issn.1000-1298.2015.06.050. LIU Guowen, LI Sheng, RUAN Jian, et al. Dither compensation technology for hysteresis of bi-direction thrust torsion coupling [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(6):349-354.(in Chinese)
18 李胜, 左强, 阮健. 双向全桥 2D 电液比例方向阀:中国, 201210410588.9 [P]. 2012-10-24.
19 左强,李胜,阮健.2D 电液比例方向阀弹性压扭联轴器研究[J/OL].农业机械学报,2014,45(5): 327-333.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140551&flag=1.DOI:10.6041/j.issn.1000-1298.2014.05.051. ZUO Qiang,LI Sheng,RUAN Jian. 2D electro-hydraulic proportional directional valve elastic thrust torsion coupling[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(5): 327-333. (in Chinese)
20 王恒,张俊杰,王永泉,等. 考虑反向器影响的滚珠丝杠副摩擦力矩计算模型[J]. 机械工程学报, 2016, 52(7):97-103. WANG Heng, ZHANG Junjie, WANG Yongquan, et al. A calculation model for friction torque of ball screws considering the influence of reversers[J]. Journal of Mechanical Engineering, 2016, 52(7):97-103.(in Chinese)
Static Characteristics of Ball-screw Type 2D Electro-hydraulic Proportional Directional Valve
ZUO Qiang1LU Qianqian1,2LI Sheng2RUAN Jian2
(1.DepartmentofMechanicalEngineering,ZhejiangUniversityCityCollege,Hangzhou310015,China2.KeyLaboratoryofSpecialPurposeEquipmentandAdvancedProcessingTechnology,MinistryofEducation,ZhejiangUniversityofTechnology,Hangzhou310014,China)
Traditional direct-drive proportional directional control valve is usually actuated by the proportional solenoid. However, it is very difficult to improve the flow,because of the magnetic saturation of the proportional solenoid itself. Therefore, a new 2D electro-hydraulic proportional directional control valve was proposed. A new ball-screw type axial compression and torsion coupling as an important part was designed in this valve, which was used to amplify the driving force of the solenoid. In the theoretical analysis, the amplification coefficient was 20. It was to overcome the friction force and clamping force or other nonlinear factors. The experimental results showed that the larger helix angles and the force transfer radius of the compression and torsion coupling were, the more obvious the effect of pressure-torsion was; changing of flutter amplitude compared with flutter frequency obviously improved the static characteristics of the valve; the static characteristics of the valve were improved obviously with the increase of the helix angle and the force transfer radius. Under pressure of 7 MPa, the maximum hysteresis of the valve did not exceed 3%, and the dead zone was about 0.5%; under pressure of 28 MPa, the flow rate was up to 190 L/min, the dead zone was about 2.8%, the maximum hysteresis was less than 5%, and pilot level leakage was about 0.2 L/min. The theoretical analysis and experimental data indicated that the valve had good static characteristics compared with the traditional valve and practical engineering applications.
electro-hydraulic proportional directional valve; compression and torsion-coupling; ball-screw type; static characteristics
10.6041/j.issn.1000-1298.2017.08.044
2017-04-05
2017-06-15
国家自然科学基金项目(51605430)
左强(1986—),男,讲师,博士,主要从事电液直接数字控制研究,E-mail: zuoq@zucc.edu.cn
阮健(1963—),男,教授,博士生导师,主要从事电液直接数字控制研究,E-mail: wxmin@mail.hz.zj.com
TH137
A
1000-1298(2017)08-0368-08
