大功率拖拉机电液提升专用力传感器磁路设计与仿真
2017-08-31李瑞川杨俊茹徐继康赤玉荣
李瑞川 郭 坤 杨俊茹 徐继康 赤玉荣
(1.山东科技大学机械电子工程学院, 青岛 266590; 2.山东五征集团, 日照 276800; 3.山东科技大学交通学院, 青岛 266590;4.山东海卓电液控制工程技术研究院, 日照 276800)
大功率拖拉机电液提升专用力传感器磁路设计与仿真
李瑞川1,2郭 坤1杨俊茹1徐继康3,4赤玉荣1
(1.山东科技大学机械电子工程学院, 青岛 266590; 2.山东五征集团, 日照 276800; 3.山东科技大学交通学院, 青岛 266590;4.山东海卓电液控制工程技术研究院, 日照 276800)
基于压磁效应原理,对大马力拖拉机电液提升控制专用力传感器的磁路结构进行了研究。分析了该力传感器的工况和现有柱状磁芯型力传感器的磁路工作原理,并针对其不足提出了一种十字芯型的力传感器磁路结构方案,将现有柱状磁芯型力传感器产品的受力维度从二维变为三维,在同等受力变形的基础上增大了磁路结构的变形程度,增加了磁场的偏置程度,提高了传感器的灵敏度与线性度。建立了磁结构的三维模型与磁路数学模型,并基于Matlab/Simulink模块分别建立了柱状磁芯型与十字芯型2种力传感器的系统仿真模型。结果表明,与柱状磁芯型力传感器相比,十字芯型力传感器线性度由1.85%降低为0.08%,灵敏度由0.09 mV/kN提高为0.21 mV/kN,适用于重载荷作用下电液提升系统中力的测量与控制,能够更好地适应恶劣的工作环境,提升拖拉机的耕作效果。
力传感器; 大马力拖拉机; 压磁效应; 磁路设计; 电液提升控制
引言
在电液提升控制过程中,土壤阻力是主要的控制信号之一。作为电液提升控制的主要信号接收装置,力传感器是电液提升器的核心部件之一。其性能直接影响到悬挂农具的作业质量。考虑其工作环境,要求其具有较大的重载荷承受能力,且需在微小应变的前提下具有良好的线性输出。
目前国内对电液提升控制方面的研究主要集中在力位综合控制等系统控制策略等方面[1-5]。包括力传感器在内的核心零部件产品基本为国外进口产品所垄断,这种局面严重地制约着我国高端农业装备的发展。这种现状与土地集约化经营、农产品生产成本控制、现代农业发展、国家粮食安全的要求不相适应。
压磁式阻力传感器的工作原理就是将外力的变化转换为磁场的变化,再通过其他手段将磁场的变化检测出来。相比于应变片式等其他几种阻力测量方法,具有以下优点:承载能力强,适用于重载环境下力的测量;输出功率大,信号强,抗干扰能力好,能够在恶劣环境工况下保持较好的工作状态[6-8]。因此,在国内外均得到了广泛应用[9-18]。本文分析力传感器的实际工况,研究并提出一种十字芯型的力传感器磁路结构方案,在同等受力变形的基础上增加磁场的偏置程度,以提高传感器的灵敏度。
1 力传感器工况分析与柱状磁芯型力传感器
1.1 力传感器工况分析
在现代大马力拖拉机智能化电液提升控制系统中,所需传感器主要包括:雷达测速传感器、车轮转速传感器、位移传感器以及力传感器[19],其所处位置如图1所示。

图1 传感器安装位置示意图Fig.1 Schematic of sensor installation location1.雷达测速传感器 2.转速传感器 3.力传感器 4.位移传感器
其中,力传感器位于悬挂系统下拉杆的铰座孔中,其作用为:①拖拉机耕种作业时检测悬挂农具所受的土壤阻力,用于拖拉机电液提升控制。②正常行驶时检测悬挂农具对拖拉机车身的压力,尤其是在不平坦的路面上行驶时对车身造成的压力冲击,用于拖拉机的减震控制。③为拖拉机滑差控制提供参考信号。
悬挂系统机构简图如图2所示。其中,AC为提升臂,BD为油缸活塞,CF为连杆,EG为下拉杆,E点为力传感器所在位置,G点为悬挂装置所连接的位置之一。在拖拉机耕作过程中,由油缸推动提升臂,经连杆作用到下拉杆上,进而带动位于下拉杆外端部的悬挂机构上下运动。下拉杆另一端作用在力传感器上,这就是本文所研究的力传感器受力来源。
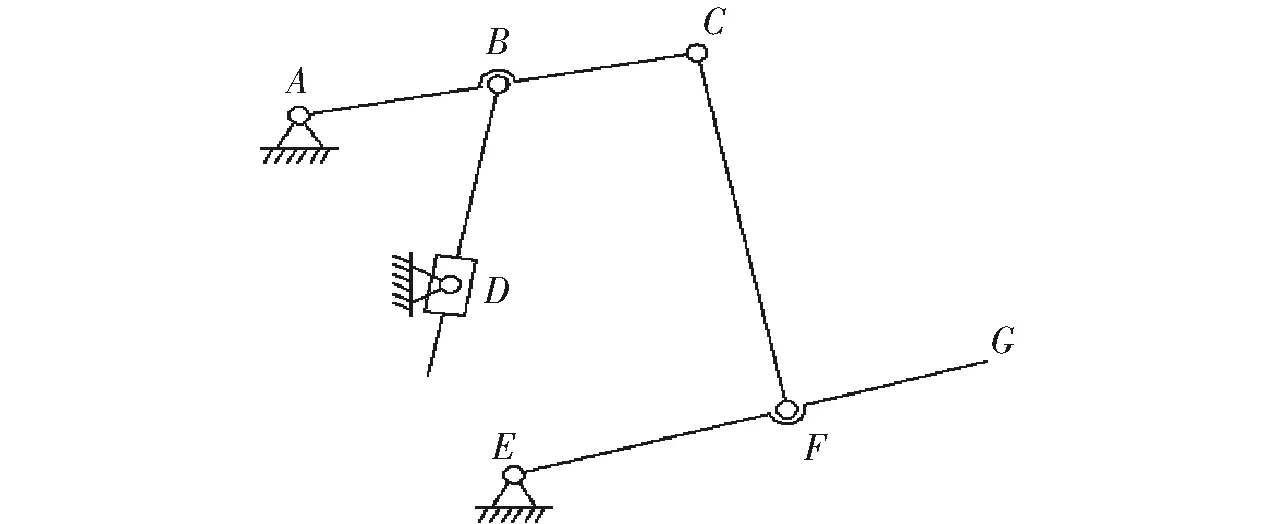
图2 悬挂系统机构简图Fig.2 Schematic of suspension mechanism
对下拉杆EG进行受力分析,如图3所示。分析可知,作用于传感器位置E上的力可以分解为水平方向分力与竖直方向上的分力,且有
(1)
式中θ——连杆CF与竖直方向夹角FCF——油缸作用在连杆CF上的拉力FEx、FEy——传感器受到的水平、竖直方向分力,其大小与悬挂负载以及下拉杆与水平方向夹角α有关
FGx、FGy——悬挂点G所受到的水平、竖直方向分力,其大小与悬挂装置本身质量以及土壤阻力有关
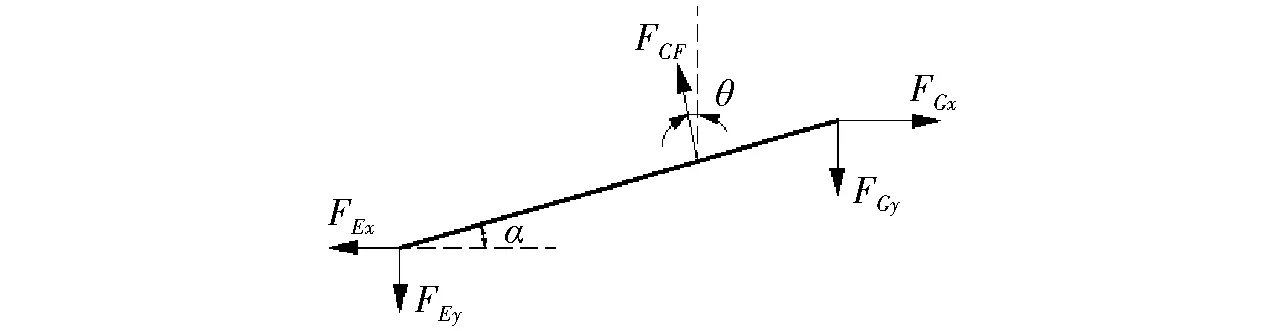
图3 下拉杆受力图Fig.3 Force diagram of lower link
由式(1)变形可得
(2)
又
(3)
式中G——悬挂装置自身重力Ff——拖拉机所受土壤阻力
由上述分析可知,位于E点处的力传感器所检测到的力,既包含了土壤阻力,同时还反映出了悬挂机构的位置信息。后者可以通过提升臂铰接处(A点处)的位移传感器来测量,如图1所示。因此,为准确地反映土壤阻力Ff的大小,除了需要位于E点处的力传感器的测量值之外,还需要位移传感器的测量值,将二者综合处理,通过一定的函数关系来得出土壤阻力Ff的实际值。这部分涉及到电液提升控制器中的信号处理与控制策略,本文不做过多研究。
1.2 柱状磁芯型力传感器
德国某公司生产的一款专门用于大马力拖拉机电液提升控制的柱状磁芯型力传感器。其工作原理为:在无负载条件下,通过磁极之间的初级线圈形成一个对称磁场。当检测到拉应力或压应力时,则原来各向同性材料的磁性就会发生变化,从而使磁场变成非对称状态,导致次级线圈之间形成磁位差,使次级回路中有磁通量流过。这样,就能在次级线圈中产生感应电流[20]。其磁路结构包括励磁磁芯及线圈、中间磁路和感应磁芯及线圈3部分。其励磁磁芯采用柱状结构,用于承受磁芯轴向方向的剪切应力。其磁路三维模型如图4所示。
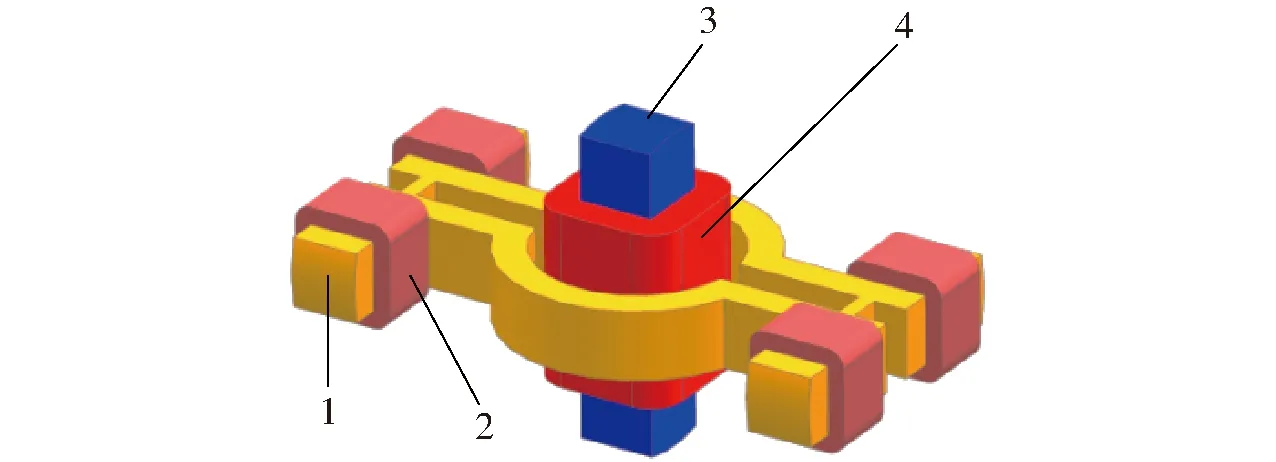
图4 柱状磁芯型力传感器磁路结构三维模型Fig.4 3D model of internal magnetic circuit structure of columnar excitating magnetic core type draft sensor1.感应磁芯 2.感应线圈 3.励磁磁芯 4.励磁线圈
2 新型力传感器磁路结构方案设计
在上述力传感器产品中,受力件励磁磁芯为柱状结构,其在剪切应力作用下发生剪切变形,进而导致材料内部不同方向上的磁导率发生变化,继而引发磁场发生偏置。其中,由于其结构特点,其所受外力均来自同一方向,不受其他方向上的作用力影响。引发磁芯磁导率变化的受力只是一个方向上的剪切应力。
根据前文中传感器工况分析可知,作用在传感器位置上的力可以分解为水平方向分力与竖直方向上的分力。因此,根据这一工况特点,设计了一种十字芯型力传感器磁路结构方案,同图4所示传感器结构相比,增加了一个正交方向的受力结构,并改变相应的磁路结构设计,使其能够同时检测水平与竖直方向上的作用力,其结构模型如图5所示。
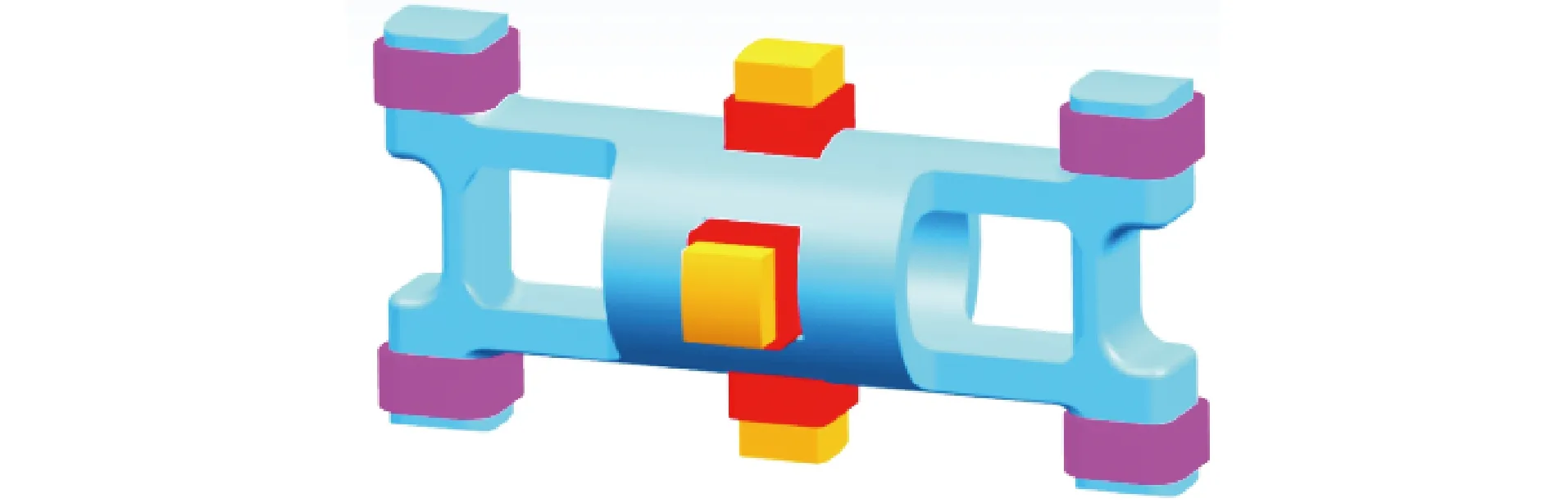
图5 十字芯型力传感器磁结构三维模型Fig.5 3D model of magnetic circuit structure of cruciform excitating magnetic core type draft sensor
比较图4和图5两种传感器磁路结构,对于十字芯型力传感器结构来讲,当只有水平方向励磁线圈工作时,其工作原理与工作过程与图4所示传感器完全相同;当水平、竖直方向线圈同时工作时,竖直方向线圈所产生的磁场将叠加在原有励磁磁场上,受力时,其磁场偏置趋势也与原有磁场的偏置趋势相同,因此,增加了磁场偏置程度。
在该方案中,采用十字形励磁磁芯结构,包括水平励磁结构与竖直励磁结构两部分,同时承受套筒剪切面上水平、竖直2个方向上的剪切作用力,继而影响励磁磁场的对称分布情况,从而使得感应线圈产生输出信号。其装配图与受力方式如图6所示。

图6 十字芯型力传感器磁结构装配及受力示意图Fig.6 Assembly drawing and force diagram of magnetic circuit structure of cruciform excitating magnetic core type draft sensor
在该方案中,力传感器可以同时检测水平与竖直方向上的作用力,二者叠加,共同构成传感器的输出信号。这样,其受力方式由二维方向上的受力转变为三维方向上的受力,可以更好地适应拖拉机电液提升器的实际工况。
3 磁路数学模型
由十字芯型力传感器磁路结构特点可知,其励磁磁芯产生磁动势包括两部分,分别为竖直方向线圈产生的磁动势FMz与水平方向线圈产生的磁动势FMp,其产生的磁通量分别为Φ0z、Φ0p,如图7所示。
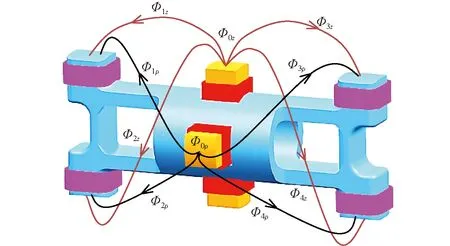
图7 十字芯型力传感器励磁磁芯磁通流向示意图Fig.7 Schematic of flux direction of excitation core of cruciform excitating magnetic core type draft sensor
令水平方向与竖直方向缠绕线圈匝数均为N,且水平、竖直方向线圈串联连接,则有
FMz=FMp=NI
(4)
FM=FMz+FMp=2NI
(5)
式中I——励磁电流FM——总磁动势
对于水平方向的励磁磁极来讲,在不考虑漏磁影响的前提下,水平方向励磁线圈磁动势产生的磁通Φ0p经过套筒分别进入4个感应磁极,由磁通的连续性可知
Φ0p=Φ1p+Φ2p+Φ3p+Φ4p
(6)
式中Φnp——从水平方向励磁磁芯流向感应磁极n的磁通量(n=1,2,3,4)
由于其N极与4个感应磁极的空间距离相同,因此有
Φ1p=Φ2p=Φ3p=Φ4p
(7)
其中,流经感应磁极1的磁通Φ1p经过中间磁路传导,通过其他3个感应磁极返回励磁磁芯,构成完整的磁回路,则有
Φ1p=Φ12p+Φ13p+Φ14p
(8)
式中Φ1np——水平励磁磁芯产生的从感应磁极1流向感应磁极n的磁通量(n=1,2,3,4)
另外,由磁路欧姆定律得
(9)
式中Rn——感应磁极n的磁阻,n=1,2,3,4RM——励磁磁芯的磁阻R0——磁路中其他部分的总磁阻,包括套筒以及其与励磁磁芯、感应磁芯连接部分
Rz——磁路总磁阻
同理,对于从水平励磁磁芯流向其他感应磁极的磁通Φnp,有
(10)
由磁场的对称性可知
(11)
因此,联立式(7)可得
(12)
由水平方向励磁线圈产生并通过各感应磁极的总磁通分别为
(13)
对于竖直方向励磁磁极来说,由图7可知,其N极到4个感应磁极的距离不相等,其中,距离感应磁极1、3的距离相对较近,相应的,其磁路磁阻相对较小,通过的磁通较大;距离感应磁极2、4的距离相对较远,其磁路磁阻相对较大,通过的磁通较小。因此
Φ1z=Φ3z>Φ2z=Φ4z
式中Φnz——从竖直方向励磁磁芯流向感应磁极n的磁通量,n=1,2,3,4
相应有
(14)
式中Φmnz——竖直方向励磁磁芯产生的从感应磁极m流向感应磁极n的磁通量,m,n=1,2,3,4
由于感应磁芯结构上的对称性,可使得从某感应磁极流向其他3个感应磁极的磁通量相等,即
(15)
由竖直方向励磁线圈产生并通过各感应磁极的总磁通量分别为
(16)
水平方向与竖直方向的磁场作用相互叠加,可得通过各感应磁极的总磁通量为
Φn0=Φn0z+Φn0p
(17)
由励磁磁芯流向各感应磁极的磁通量为
Φn=Φnz+Φnp
(18)
磁路内部从感应磁极m流向感应磁极n的磁通量为
Φmn=Φmnz+Φmnp
(19)
因此,不受力时,各感应线圈输出电压为
(20)
各感应线圈差动连接后,输出电压为
(21)
传感器整体的磁回路如图8所示。
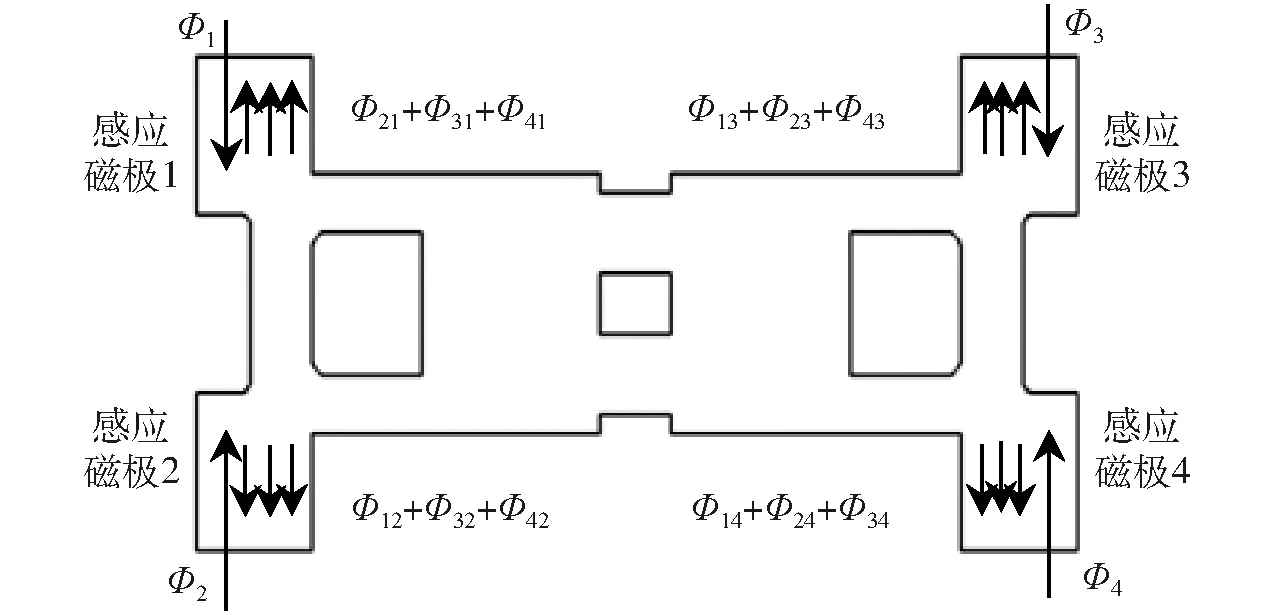
图8 整体磁回路示意图Fig.8 Schematic of integral magnetic circuit
受力时,磁场发生偏置,由于励磁磁芯沿不同方向上的磁导率发生变化,因此,从励磁磁芯流向各感应磁极的磁通量产生相应的变化,由于励磁磁芯磁阻由RM变为R′M,从励磁磁芯流向感应磁极1的磁通量Φ′1变为
(22)
其中
(23)
(24)
式中lM——感应磁芯等效长度SM——等效横截面积μM——励磁磁芯的磁导率 ΔμM——受力后励磁磁芯的磁导率变化量λs——材料饱和磁致伸缩系数Bs——材料饱和磁感应强度σ——材料内部所受机械应力
对于从励磁磁芯流向感应磁极3的磁通量Φ′3,有
(25)
其中
(26)
各磁通量分别变为Φ′mn与Φ′n,因此,各感应磁极的总磁通Φ′n0变为
(27)
由上述分析可知,励磁磁芯磁导率μM的变化是导致上述磁通发生变化的因素,而导致μM产生变化的原因除了所受应力σ的变化之外,还有材料本身的影响。再加上可以影响磁通的最重要的因素——励磁电流I,因此,式(27)可记为
(28)
各感应线圈输出电压为
(29)
传感器输出电压为
(30)
4 磁路仿真分析
在Matlab/Simulink中分别建立柱状磁芯型与十字芯型2种力传感器模型,如图9、10所示,二者均采用正弦电流作为励磁信号。
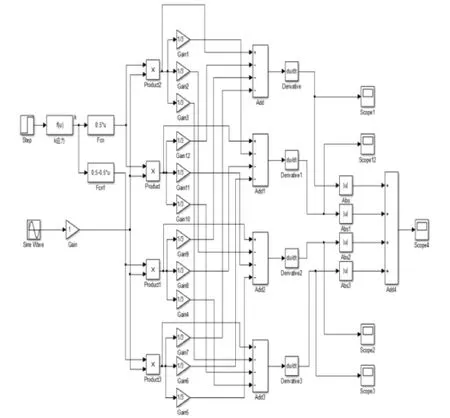
图9 柱状磁芯型力传感器系统仿真模型Fig.9 Simulation model of columnar excitating magnetic core type draft sensor
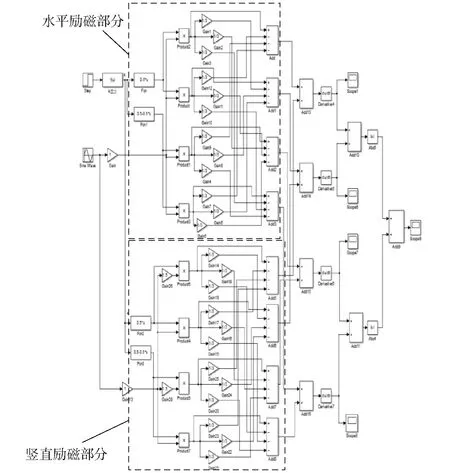
图10 十字芯型力传感器系统仿真模型Fig.10 Simulation model of cruciform excitating magnetic core type draft sensor
对比图9、10可知,在十字芯型力传感器系统仿真模型中,包括竖直励磁与水平励磁两部分。其中,水平励磁部分与图9所示的柱状磁芯型力传感器系统仿真模型相同。
当输入信号为0时,两传感器的各线圈输出信号分别如图11、12所示。两传感器输出信号如图13所示。经滤波处理后,输出均为零。
输入外力为80 kN时,两传感器各线圈输出信号分别如图14、15所示。各线圈信号经差动连接后输出,得两传感器输出信号如图16所示。
令输入信号分别为20、40、60、100 kN,两传感器输出信号分别如图17、18所示。
因此,2种传感器输入输出关系如表1所示。
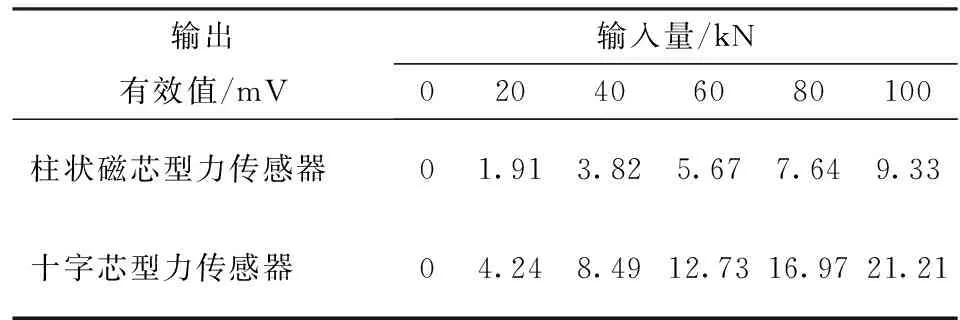
表1 传感器输入输出关系Tab.1 Input-output relation of sensor
100 kN以内,2种传感器输出特性曲线如图19所示。
拟合后的柱状磁芯型力传感器输出特性曲线方程为
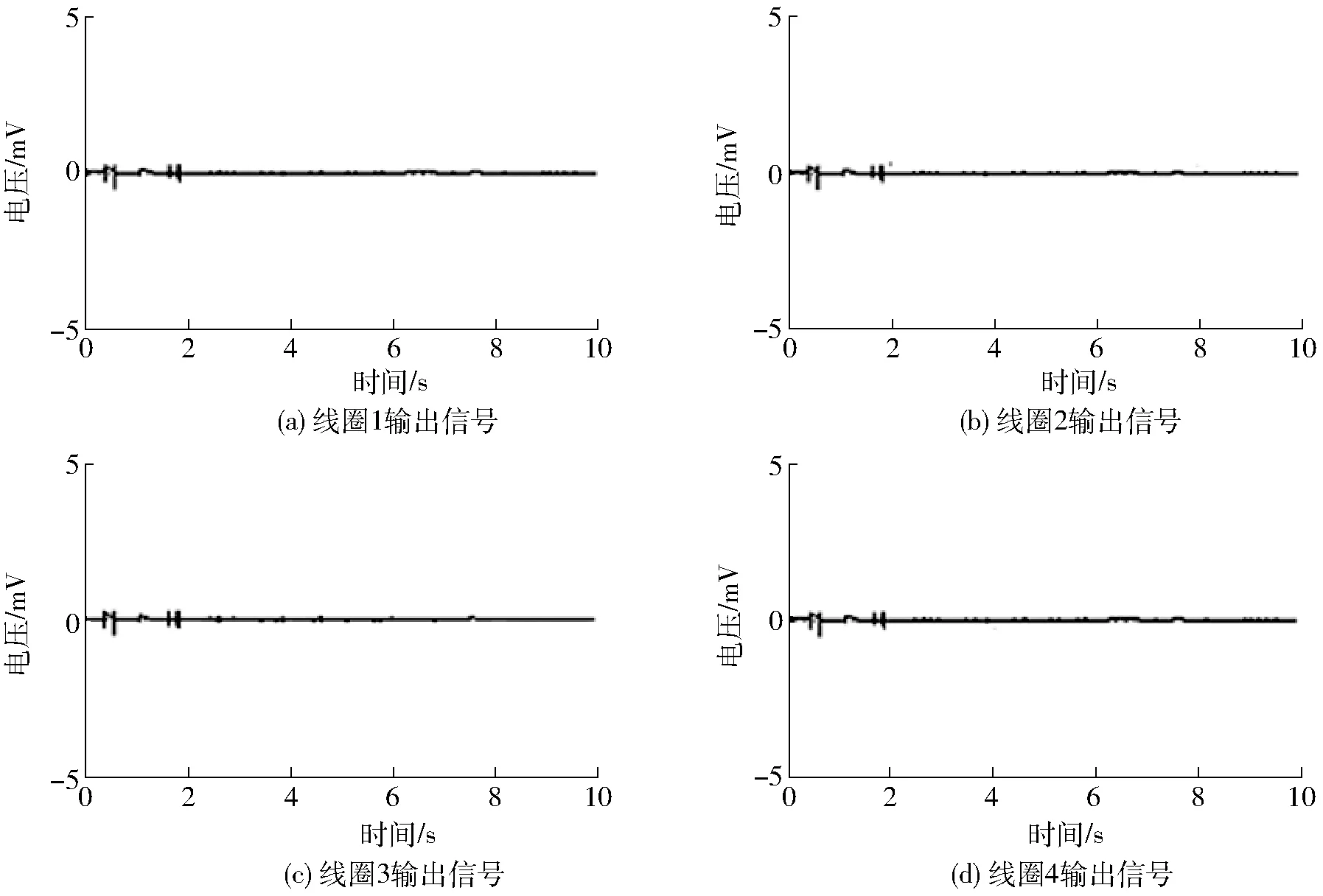
图11 输入信号为0时,柱状磁芯型力传感器各线圈输出信号Fig.11 Output signals of each induction coil of columnar excitating magnetic core type draft sensor with zero input
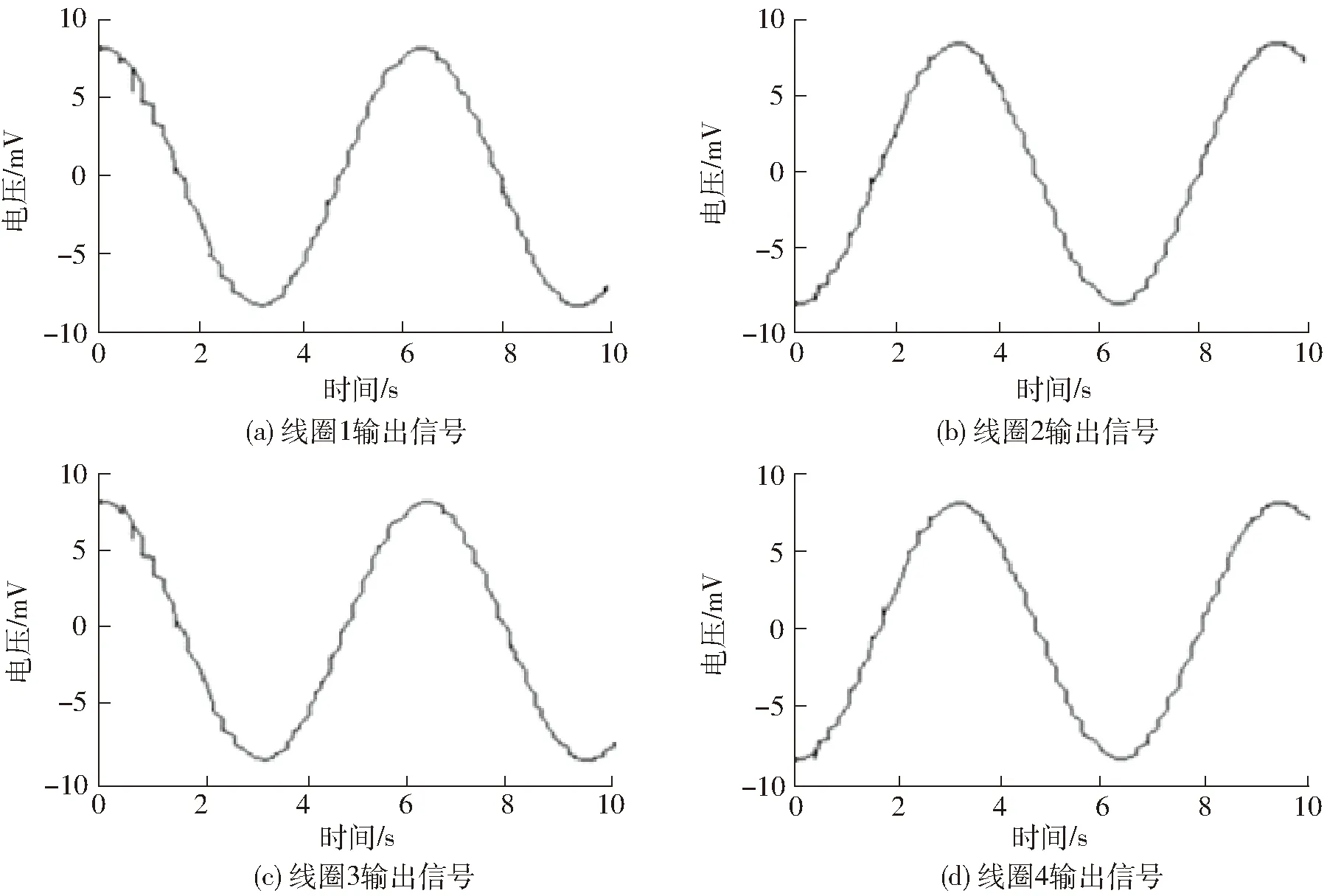
图12 输入信号为0时,十字芯型力传感器各线圈输出信号Fig.12 Output signals of each induction coil of cruciform excitating magnetic core type draft sensor with zero input

图13 输入信号为0时,传感器输出信号Fig.13 Output signals of two sensors with zero input

图14 输入信号为80 kN时,柱状磁芯型力传感器各线圈输出信号Fig.14 Output signals of each induction coil of columnar excitating magnetic core type draft sensor with 80 kN force input
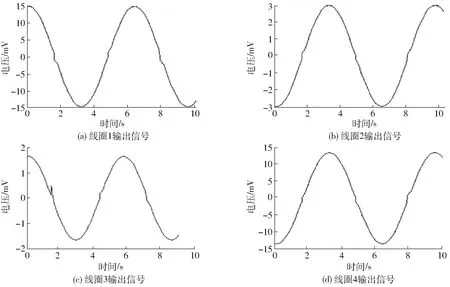
图15 输入信号为80 kN时,十字芯型力传感器各线圈输出信号Fig.15 Output signals of each induction coil of cruciform excitating magnetic core type draft sensor with 80 kN force input
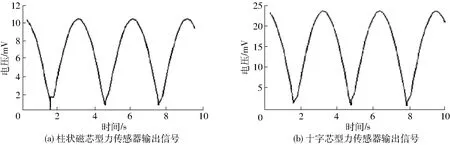
图16 输入信号为80 kN时,传感器输出信号Fig.16 Output signals of two sensors with 80 kN force input
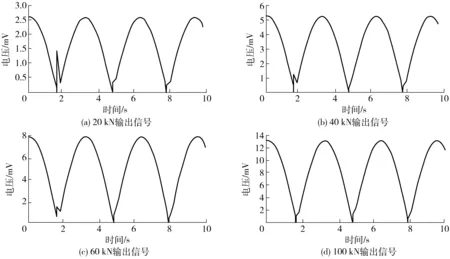
图17 不同输入信号时,柱状磁芯型力传感器输出信号Fig.17 Output signals of columnar excitating magnetic core type draft sensor with different force input

图18 不同输入信号时,十字芯型力传感器输出信号Fig.18 Output signals of cruciform excitating magnetic core type draft sensor with different force input
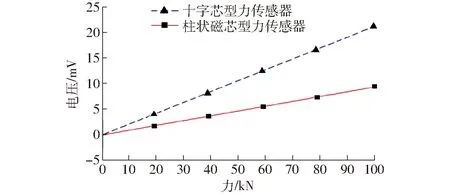
图19 传感器输出特性曲线Fig.19 Output characteristic curves of two sensorsy=0.093 8x-0.036 2
(31)
其线性度为1.85%,灵敏度为0.09 mV/kN。
十字芯型力传感器输出特性曲线方程为
y=0.212 1x-0.001
(32)
其线性度为0.08%,灵敏度为0.21 mV/kN。
由图19可知,在相同外力作用下,十字芯型传感器输出幅度明显高于柱状磁芯型传感器输出幅度,其灵敏度大大提高,增幅为133%。同时,线性度由1.85%降低为0.08%,有了明显的改善。分析其原因为:本文所设计的十字芯型力传感器同时受水平、竖直方向外力共同作用,其励磁磁场也来源于2个励磁线圈作用的叠加,其磁路复杂程度高于柱状磁芯型力传感器,在同等受力情况下,其磁场的偏置程度也相应增加,使得传感器灵敏度增大。
5 结论
(1)分析了现有柱状磁芯型力传感器产品的工作原理及磁路结构,结合力传感器的实际工况,基于压磁效应原理,提出了一种十字芯型力传感器磁路结构方案,使其能够同时承受水平与竖直方向上的作用力,将现有产品二维方向上的受力变形,转变为三维方向上的受力变形,在同等受力的情况下增大了内部磁场的变形程度,提高了其灵敏度,更适用于大马力拖拉机电液提升器的实际工况。
(2)建立了十字芯型力传感器磁路结构的数学模型,分析了该传感器工作时内部磁通的流动变化情况,得出了影响磁场变化的3个要素,即材料磁导率μM、励磁电流I以及所受应力σ。
(3)分别建立了柱状磁芯型力传感器与十字芯型力传感器系统的仿真模型并进行仿真测试,仿真结果表明,相比于现有的柱状磁芯型力传感器,本文提出的十字芯型力传感器磁路方案具有良好的线性度与灵敏度,其线性度为由1.85%降低为0.08%,灵敏度由0.09 mV/kN提高为0.21 mV/kN,增幅为133%。
1 郭兵.拖拉机电控液压悬挂系统力位综合控制技术研究[D].南京:南京农业大学,2013. GUO Bing. Research of force-position combined control for tractor electro-hydraulic hitch system [D].Nanjing: Nanjing Agricultural University, 2013.(in Chinese)
2 鲁植雄,郭兵,高强.拖拉机耕深模糊自动控制方法与试验研究[J].农业工程学报,2013,29(23):23-29. LU Zhixiong, GUO Bing, GAO Qiang. Study on auto-control method and experiment for tractor depth based on fuzzy control[J].Transactions of the CSAE,2013,29(23):23-29.(in Chinese)
3 席鑫鑫.基于CAN总线的拖拉机液压悬挂系统力位综合调节的研究[D].南京:南京农业大学,2011. XI Xinxin. Research of force-position combined control for tractor hydraulic hitch system based on CAN bus[D]. Nanjing: Nanjing Agricultural University, 2011.(in Chinese)
4 白学峰,鲁植雄,常江雪,等.基于滑转率的拖拉机自动耕深模糊控制仿真[J/OL].农业机械学报, 2012,43(增刊):6-10. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s02&flag=1.DOI:10.6041/j.issn.1000-1298.2012.S0.002. BAI Xuefeng, LU Zhixiong, CHANG Jiangxue,et al. Fuzzy control algorithm simulation of automatic control of tilling depth for tractor based on slip rate[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012,43(Supp.):6-10.(in Chinese)
5 吴维雄,马荣朝. 悬挂犁耕机组耕深自动控制的研究[J]. 农机化研究, 2007, 36(9):77-79,97. WU Weixiong, MA Rongchao. Design of the automatic control of the plowing depth of the integrated plowing set[J].Journal of Agricultural Mechanization Research, 2007, 36(9):77-79,97.(in Chinese)
6 赵新,罗锡文,WELLS L G. 土壤阻力连续测试设备研制[J]. 农业工程学报,2009,25(2):67-71. ZHAO Xin, LUO Xiwen, WELLS L G. Development of continuous measurement system for soil resistance[J].Transactions of the CSAE, 2009, 25(2): 67-71.(in Chinese)
7 许春林,李连豪,赵大勇,等. 悬挂农具作业动力学参数田间实时测试系统[J/OL]. 农业机械学报,2013,44(4):83-88,82. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130415&flag=1.DOI:10.6041/j.issn.1000-1298.2013.04.015. XU Chunlin, LI Lianhao, ZHAO Dayong, et al. Field real-time testing system for measuring work dynamic parameters of suspension agricultural implement[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(4):83-88,82.(in Chinese)
8 冯竞祥,赵新,马健军.土壤机械阻力测定研究进展[J].农业工程,2013,3(2): 1-4. FENG Jingxiang, ZHAO Xin, MA Jianjun. Advance on measurement of soil mechanical resistance [J].Agricultural Engineering, 2013, 3(2): 1-4. (in Chinese)
9 刘慧芳,贾振元,王福吉,等. 超磁致伸缩力传感器及其实验研究[J]. 大连理工大学学报, 2011, 51(6):832-836. LIU Huifang,JIA Zhenyuan,WANG Fuji,et al. Giant magnetostrictive force sensor and its experimental study[J].Journal of Dalian University of Technology, 2011, 51(6):832-836.(in Chinese)
10 韩江义,高翔.一种检测拖拉机牵引力的轴销式传感器的研制[J].农业装备与车辆工程,2014, 52(11):10-13. HAN Jiangyi, GAO Xiang. Development of a shaft type sensor for measuring tractor pull force[J]. Agricultural Equipment &Vehicle Engineering,2014, 52(11):10-13.(in Chinese)
11 樊长在,杨庆新,杨文荣,等. 基于磁致伸缩逆效应的超磁致伸缩力传感器[J]. 仪表技术与传感器,2007(4):5-7. FAN Changzai, YANG Qingxin, YANG Wenrong, et al. Gian tmagnetostritive force sensor based on inverse magnetostritive effect[J]. Instrument Technique and Sensor, 2007(4):5-7.(in Chinese)
12 石延平,倪立学,周庆贵. 一种新型薄膜压磁电感式压力传感器的研究[J]. 传感技术学报, 2010,23(9): 1256-1260. SHI Yanping, NI Lixue, ZHOU Qinggui. Studyona new electromagnetic film pressure sensor based on the magnetoelasticity effect[J].Chinese Journal of Sensors and Actuators, 2010,23(9): 1256-1260.(in Chinese)
13 JANIS L B, EDGARS R, ERIKS K. Simulation of pressure oscilation in hydraulic hitch system [J]. Engineering for Rural Development, 2010, 28(5):144-148.
14 ZHANG Luyu,WANG Bowen, YIN Xiaowen, et al. The output characteristics of galfenolmagnetostrictive displacement sensor under the helical magnetic field and stress[J].IEEE Transactions on Magnetics, 2016, 52(7):1-4.
15 OSINENKO P V, GEISSLER M, HERLITZIUS T. A method of optimal traction control for farm tractors with feedback of drive torque[J]. Biosystems Engineering, 2015,129: 20-33.
16 刘洪利,王熙.基于CAN总线的拖拉机机组作业性能分析[J/OL].农业机械学报,2016,47(增刊):30-34. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2016s005&flag=1.DOI:10.6041/j.issn.1000-1298.2016.S0.005. LIU Hongli, WANG Xi. Analysis of tractor working performance based on CAN bus[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.):30-34.(in Chinese)
17 于文华,田昊,梁超,等.基于加速度补偿的土壤紧实度测量方法与传感器设计[J/OL].农业机械学报,2017,48(4):250-256. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170432&flag=1.DOI:10.6041/j.issn.1000-1298.2017.04.032. YU Wenhua, TIAN Hao, LIANG Chao, et al. Soil compactness measuring method based on acceleration compensation and sensor design [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017,48(4):250-256.(in Chinese)
18 赵丹,肖继学,刘一. 智能传感器技术综述[J]. 传感器与微系统,2014,33(9):4-7. ZHAO Dan,XIAO Jixue,LIU Yi. Overview of smart sensor technology[J].Transducer and Microsystem Technologies,2014,33(9):4-7.(in Chinese)
19 李立.拖拉机后悬挂电液控制系统的研究[D].哈尔滨:哈尔滨工业大学,2012. LI Li. Research on the electro-hydraulic system in tractor rear suspension[D].Harbin: Harbin Institute of Technology,2012.(in Chinese)
20 李明生,迟瑞娟,毛恩荣,等. 基于磁致伸缩的大功率拖拉机阻力传感器设计[J/OL]. 农业机械学报,2013, 44(8):8-12,32. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130802&flag=1.DOI:10.6041/j.issn.1000-1298.2013.08.002. LI Mingsheng, CHI Ruijuan, MAO Enrong, et al. Design of draft sensor in big-power tractor raiser based on magnetostriction[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013, 44(8):8-12,32.(in Chinese)
Magnetic Circuit Design and Simulation of Draft Sensor in Electro-hydraulic Lifting Mechanism of High-power Tractor
LI Ruichuan1,2GUO Kun1YANG Junru1XU Jikang3,4CHI Yurong1
(1.CollegeofMechanicalandElectronicEngineering,ShandongUniversityofScienceandTechnology,Qingdao266590,China2.ShandongWuzhengGroup,Rizhao276800,China3.CollegeofTransportation,ShandongUniversityofScienceandTechnology,Qingdao266590,China4.ShandongHaizhuoResearchInstituteofElectro-hydraulicControlEngineeringTechnology,Rizhao276800,China)
Based on magnetoelastic effect, the magnetic circuit of the draft sensor, which was used in electro-hydraulic lifting mechanism of high-power tractor, was learned and designed. According to the analysis of the working condition and the structure of the same type product abroad which used a columnar excitating magnetic core to create the working magnetic field, a new kind of magnetic structure was designed, which changed the excitating magnetic core from columnar to cruciform, so that changed the mechanical dimensions from 2D to 3D. For the design, bear force from horizontal and vertical directions in the same time, which resulted in the shear deformation in both directions, it also made greater change of the magnetic field, and it is more comfortable under actual working conditions. The 3D model was built to show the structure of the draft sensor with cruciform excitating magnetic core, and the mathematical model was built, which could describe the operating principle and working process of the magnetic circuit in detail. Then according to the mathematical model, the simulations of two kinds of draft sensor were made by Matlab/Simulink. By comparing the two simulations, the result showed that the linearity of this new design with a cruciform excitating magnetic core was changed from 1.85% to 0.08%. And the sensitivity was changed from 0.09 mV/kN to 0.21 mV/kN, which proved that the new design of draft sensor with cruciform excitating magnetic core was more suitable for the force measurement and control of electro-hydraulic lifting mechanism under the condition of heavy load, which can be more adaptable for bad working environment to improve the tillage effect.
force sensor; high-power tractor; magnetoelastic effect; magnetic circuit design; electro-hydraulic lifting control
10.6041/j.issn.1000-1298.2017.08.043
2016-12-01
2017-02-07
国家发改委增强制造业核心竞争力重点领域关键技术产业化专项资金项目(1511010015)
李瑞川(1964—),男,研究员,主要从事智能传感控制技术研究,E-mail: liruichuan808@126.com
杨俊茹(1969—),女,教授,主要从事机械设计制造及自动化研究,E-mail: jryangzhang@163.com
TP212.1; TM14
A
1000-1298(2017)08-0358-10