基于机器视觉的手机转接口尺寸及管脚数量的测量
2017-08-24陈宝华吴泉英
陈宝华,王 军,张 皓,吴泉英
(1.苏州科技大学 数理学院,江苏 苏州 215009;2.苏州科技大学天平学院,江苏 苏州 215009)

基于机器视觉的手机转接口尺寸及管脚数量的测量
陈宝华1,2,王 军1,2,张 皓1,2,吴泉英1,2
(1.苏州科技大学 数理学院,江苏 苏州 215009;2.苏州科技大学天平学院,江苏 苏州 215009)
基于机器视觉原理实现对手机转接口尺寸及管脚数量的非接触式测量. 采用光源、远心镜和CCD相机搭建检测装置,获取手机转接口的图像数据,并利用图像边缘检测技术实现特征轮廓的提取,获得较为准确的转接口尺寸和管脚数量.
长度测量;机器视觉;边缘检测
机器视觉是能自动获取1幅或多幅目标物体图像[1-2],对所获取图像的各种特征量进行处理、分析和测量,并对测量结果做出定性分析和定量解释,从而得到有关目标物体的某种认识并做出相应决策的系统,具有非接触、实时性、速度快、精度合适、现场抗干扰能力强等优点. 以生活中手机转接口为例,基于机器视觉原理实现对手机转接口尺寸及PIN数量的非接触式测量. 实验涉及光源、远心镜、CCD相机和图像边缘检测技术,配合搭建的实验装置,获得畸变小、特征对比度明显的手机转接口图像,运用2种差分方法梯度法和罗伯茨(Roberts)算子成功提取尺寸边缘及PIN特征,得出具体数据. 此装置易于实现,操作方便,可增加大学物理实验长度的非接触式测量方法,提高大学生的学习兴趣,提升学生的动手能力,并与现代工业自动化接轨[3].
1 检测系统工作原理
基于机器视觉的手机转接口尺寸及PIN数量测量系统主要由光源、远心镜、CCD相机和计算机构成[4-5],如图1所示. 待测转接口置于定焦远心镜头的工作距离处,同时光源以特定颜色、一定角度照亮转接口表面,以此突出轮廓对比度;CCD相机获得远心镜所成转接口的完整像,像尽量铺满相机的整个视场. 图像边缘检测技术:利用梯度法和罗伯茨(Roberts)算子提取图像的边缘特征,选择合适的灰度阈值,排除其他信息的干扰,得出特征图像像素数据. 经过像素标定,利用每个像素与实际长度之间的关系,获得转接口的具体尺寸.

图1 系统工作原理图
2 参量选取及边缘检测
不同的待测物体,其光源、镜头及相机参量都不同. 根据物体需测的特征来选取光源,对于具体尺寸或PIN数量的测量可选择背光式外加环光式. 本文的手机转接口尺寸宽度大致为7 mm,要求测量精度达到0.05 mm,由此可选择靶面尺寸、像素合适的相机及极限放大倍率一致的远心镜头. 相机像素精度选型,如下式:
μ=lx/Px,
(1)
其中,lx为水平方向上相机满视场的实际尺寸,Px为水平方向上的总像素,μ为每个像素代表的实际大小. 远心镜头具有放大或缩小像、景深大和畸变小的特点. 在工业测量中,为了提高测量精度,要求待测物体的像尽量铺满相机的满视场,因此选择合适的放大倍率镜头尤为重要. 一般来说,极限放大倍率为
β=Dx/Lx,
(2)
其中,Lx为实际待测物体尺寸,Dx为CCD靶面尺寸. 在实际测量中,要求选择镜头的放大倍率接近于极限放大倍率.
通常,图像的特征区域位于灰度突变处,可以用灰度差分提取. 对于手机转接口,其边缘和8个PIN管脚的提取可同时运用梯度法和罗伯茨算子法. 计算机读取的图像实际上是二维的离散型数集,通过推广二维连续型求函数偏导的方法,求得图像的偏导数,选取灰度的锐化,即梯度法[6-7]. 图像中f(x,y)点的梯度方向为灰度值f(x,y)在这点变化率最大的方向,模G(f(x,y))为灰度值f(x,y)的最大变化率,为
{[(f(x,y)-f(x+1,y)]2+
[f(x,y)-f(x,y+1)]2}1/2.
(3)
从式(3)中可以看出,梯度法求得的是图像的垂直和水平梯度,但有时也需要对角线方向上的梯度,即Roberts算子:
{[f(x,y)-f(x+1,y+1)]2+
[f(x,y+1)-f(x+1,y)]2}1/2.
(4)
由于该算子检测的边缘图像常需做细化处理,因此可结合梯度法,更加精确定位边缘特征[8].
3 实验装置
实验测量装置如图2所示,由下至上分别为手机转接口、环形白光源、远心镜头及工业CCD相机. 装置置于简易铁架台上,底端与光学平台固定,镜头及相机用铁夹子锁定. 其中转接口实际尺寸为6.650 mm,镜头放大倍率为0.5×,工作距为100 mm,CCD规格为1/3英寸,像素1 280×980,并在测量之前以标定板进行实际标定,消除畸变. 经过计算,每个像素代表的实际尺寸为0.008 4 mm,满足精度及视场要求. 图3为手机转接口. 图4为成像图,从图4中可看出,转接口的像轮廓较为清晰,中间8个PIN管脚对比度明显,说明光源亮度及位置正确. 转接口像铺满相机的大半个视场,利于后续的精确检测.

图2 实验装置

图3 转接口
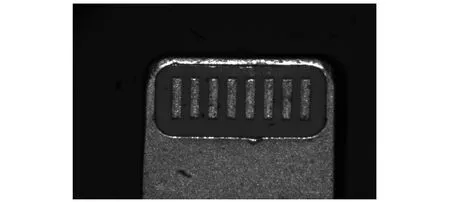
图4 成像图
为测量转接口水平方向上的尺寸,需要选定测量区域,如图5(a)所示. 利用梯度法对整个图像进行梯度锐化,提取特征边缘. 首先设定阈值为2,梯度值大于2的像素点为黑色,其余为白色. 从图5(b)中可看出,梯度锐化后,转接口图像的边缘及上部8个PIN管脚与周围的背景灰度值对比尤为强烈,效果很好,但同时周围也出现噪点. 图5(c)为边缘区域的灰度图,从图中可直接看出2个分界处的像素灰度值突变明显,两侧部分较为平缓,中心部分突出,经算法提取,之间的像素宽度为798. 因此,根据标定的像素宽度,得出转接口水平尺寸6.699 mm,相比于原始数据6.650 mm,偏差0.049 mm. 图5(d)为边缘选取后的图像,其中绿色划线为转接口边缘.

(a)边缘区域

(b)梯度法锐化

(c)边缘灰度图

(d)边缘提取 图5 边缘尺寸处理图
接下来选定另一待测区域,测PIN管脚的数量. 同样进行梯度锐化,从图6(b)中可看出锐化后的图像存在很多杂散灰度干扰,中心处尤为明显,并且轮廓不清晰,影响判别. 图6(c)为中心灰度图,通过拟合才能获得8个主要峰值,周围噪声较多,灰度值分布不均匀,因此需要进一步处理. 如图6(d)所示,选用Roberts算子对锐化后的图像重新提取特征,阈值为1,以对角线方向相邻两像素之差近似梯度幅值检测边缘,过滤噪点. Roberts算子锐化后,PIN管脚的边缘尤为清晰,对比度明显. 进一步过滤面积较小的斑点,可获得PIN管脚的数量为8个,用矩形框显现出来,如图6(e)所示.
为减少误差,提高检测精度,接下来拍取10幅图像进行测量,以平均值作为实际测量尺寸,见表1. 从表1可看出,随着测量次数的增多,平均测量尺寸与实际尺寸越发接近,相对偏差在0.02%左右. 但第5次测量结果6.566 mm和第7次测量结果6.728 mm与实际尺寸6.650 mm偏差较大,最大相对偏差达到1.2%,其原因可能在于两方面:一是震动引起拍摄角度的变化,导致测量的像素宽度出现误差;二是相机对焦时,出现曝光延迟,采集图像的对比度低于或高于其他图像,计算出的像素宽度有偏差. 而对于PIN脚数量的检测则极为精确,正确率高达100%,原因可能在于2种梯度算法的完美结合,边缘提取准确率高,或者是测量的要求不同,前者需测像素宽度,后者测量个数,精度要求不高.

(a)中心区域选取

(c)中心灰度图

(d)Roberts锐化

(e)结果显示图6 图像处理图

表1 平均测量数据
上述图像处理基于Matlab实现,较好地完成手机转接口特征的测量. 在实际操作中,测量值与理论值可能存在较大误差,原因如下:第一,光学平台不稳定,震动过大,图像采集模糊;第二,光源的选择和入射位置不精确或错误,采集图像的特征对比度不明显,特征提取的阈值不同,相同的程序不能运用,影响计算机读数;第三,镜头相机的选型不当影响待测物体成像. 还有待测物体摆放位置等. 解决这些问题的关键是各部分元件的选型及其之间配合准确,加强外界环境的稳定性,选择合适的程序进行处理,等等.
4 结束语
基于机器视觉原理实现对手机转接口尺寸及PIN数量的测量,利用光源、远心镜、CCD相机和图像边缘检测技术,配合搭建的实验装置,运用2种差分方法梯度法和罗伯茨(Roberts)算子成功提取尺寸边缘及PIN特征. 实验过程涉及光学成像知识、图像处理方法等. 此装置易于实现,操作方便,能够多次测量求平均. 相比于传统的长度测量实验,此方法涉及的领域较宽,动手能力要求更高,知识更为丰富,并且可与其他实验相结合,例如牛顿环和迈克耳孙干涉仪实验,以相机采集环状条纹图像,直接读数和判别,拓宽领域,与现代工业自动化接轨.
[1] Bogue R W. Machine vision theory, algorithms, practicalities [J]. Assembly Automation, 2005,25(3):58.
[2] Lahajnar F, Bernard R, Pernuš F, et al. Machine vision system for inspecting electric plates [J]. Computers in Industry, 2002,47(1):113-122.
[3] 王建中,黄林,唐一文. 基于LabVIEW机器视觉的迈克耳孙干涉仪实验[J]. 物理实验, 2014,34(11):40-42.
[4] 雷良育,周晓军,潘明清. 基于机器视觉的轴承内外径尺寸检测系统[J]. 农业机械学报, 2005,36(3):131-134.
[5] 董玉廷. 机器视觉中工件轮廓精确提取方法的研究[D]. 重庆:重庆大学,2013.
[6] 曹建秋,王华清,蓝章礼. 一种动态梯度算法图像二值化边缘提取[J]. 计算机与信息技术, 2009(9):106-108.
[7] 马宇飞. 基于梯度算子的图像边缘检测算法研究[D]. 西安:西安电子科技大学,2012.
[8] 王方超,张旻,宫丽美. 改进的Roberts图像边缘检测算法[J]. 探测与控制学报,2016,38(2):88-92.
[责任编辑:任德香]
Measuring the size and the number of pins of mobile phone interface based on machine vision
CHEN Bao-hua1,2, WANG Jun1,2, ZHANG Hao1,2, WU Quan-ying1,2
(1. School of Mathematics and Physics, Suzhou University of Science and Technology, Suzhou 215009, China;2. Tianping College of Suzhou University of Science and Technology, Suzhou 215009, China)
A non-contact measurement method based on machine vision theory was proposed to realize the measurement of the size and the number of pins of mobile phone interface. A simple experimental apparatus was set up, which contained light source, telecentric lens and CCD camera. The image of the mobile phone interface was collected, the contour was extracted using edge detection technology. The accurate interface size and number of pins were obtained.
length measurment; machine vision; edge detection
2017-03-30;修改日期:2017-04-17
苏州科技大学天平学院教育教学改革研究重点项目(No.2015TJGA-04);江苏省教育厅教学改革研究立项重点项目(No.2015JSJG058);苏州科技学院校级重点专业应用物理学专业建设项目(No.2013ZYXZ-08);研究生科研创新计划项目(No.KYLX15_1313)
陈宝华(1990-),男,江苏泰州人,苏州科技大学数理学院实验师,硕士,从事光学设计与图像信息处理方面的研究.
王 军(1981-),男,山东济宁人,苏州科技大学数理学院副教授,博士,主要从事物理实验教学和光学测量方面的研究.
TP242.62;TB921
A
1005-4642(2017)08-0006-04
