天狼星无人机航测系统在水利工程测绘中的应用
2017-08-11严慧敏
严慧敏,王 飞
(安徽省水利水电勘测设计院勘测分院,安徽 蚌埠 233000)
测绘4.0:拓普康索佳应用方案专栏
天狼星无人机航测系统在水利工程测绘中的应用
严慧敏,王 飞
(安徽省水利水电勘测设计院勘测分院,安徽 蚌埠 233000)
无人机航测技术作为一项空间数据获取的重要手段,具有适用地形广泛、成本低、快速高效、机动灵活等优势。随着国家在水利建设方面投入的增加,传统的全站仪、GPS RTK实地测量方式在效率上已不能满足水利工程建设的要求。本文利用天狼星无人机航测系统对水利工程项目进行航测,并与传统测量方式进行比较,通过分析航测精度和作业效率,对天狼星无人机航测系统在水利工程测绘中的优势进行了探讨研究。
水利工程;天狼星无人机航测系统;精度与效率评价
现阶段全站仪或GPS RTK实地测量在效率上不能满足新形势下水利工程测绘工作的要求[1]。因此,应在合理制定测量工作计划的基础上,积极尝试新的测量技术和方式,提高测绘工作效率,保证水利建设工程项目的顺利进行。无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快捷、精细准确、作业成本低、时效性好的优点,目前已广泛应用于国家重大工程建设、灾害应急与处理、国土监测、资源开发等方面[2]。
1 天狼星无人机航测系统
天狼星无人机航测系统主要由无人机飞行平台、遥感传感器系统、飞行控制系统、通信系统、GPS实时动态差分定位系统和数据后处理系统组成。地面部分包括航线设计系统、无人机地面控制子系统及数据通信显示子系统(如图1、图2所示),飞行平台为手抛式,适宜飞行高度为59~750 m,地面分辨率为1.6~20 cm,抗风能力平均风速为50 km/h,适合温度为-20℃~45℃,最大续航时间为55 min,巡航速度为65 km/h。

图1 天狼星无人机
2 项目概况及数据处理流程
京杭运河微山二线船闸位于山东省微山县城北边京杭运河与二级坝交汇处,是京杭运河上的重要交通要道。随着经济的迅猛发展,船舶通过量持续快速增长,二线船闸的通过能力和实际运量的矛盾日益突出,原有的船闸已不能满足通航能力,为改善京杭运河济宁段的运输条件,计划在二线船闸附近新建一座三线船闸。拟建三线船闸闸址位于原有的二线船闸与南水北调东线工程微山湖二级坝输水渠之间。测量范围东至S348与S104道路交汇处,西至二级坝一号节制闸东侧,南至二级坝沿航道向下游4 km,北至二级坝沿航道向上游3.5 km,测量总面积为11.1 km2。测区交通较为方便,但测区范围内陆上部分植被覆盖严重,主要植被为杨树和桃树,地形以台田为主,现有的二线船闸西边紧靠张白庄村,村庄边有运煤码头;二级坝上游湖区属微山湖湿地,主要是芦苇及莲藕等水生植被,下游湖区有部分采煤塌陷区且布满渔网,同时航道内来往船只频繁,测量难度为中等。
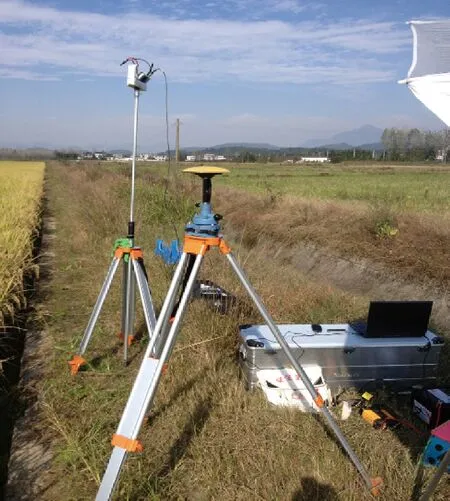
图2 地面站
2.1 技术路线
(1) 地形图测量比例尺为1∶2000,采用的平面系统为1980西安坐标系,高斯正形投影,3°分带,中央子午线117°,高程系统为1985国家高程基准,基本等高距为0.5 m。根据水利测区、形状及成图比例尺1∶2000的要求,航摄分辨率设置为10 cm,航向重叠度设置为60%~70%,旁向重叠度设置为65%。根据《1∶500 1∶1000 1∶2000地形图航空摄影规范》(GB/T 6962—2005),像片倾角≤2°,像片旋角≤6°,航线弯曲度≤3%。
(2) 飞行计划设置:此次飞行区域约9.12 km2,利用天狼星航测系统桌面软件制定测区飞行计划。该软件可根据飞行区域自动计算分割飞行计划,选择最短路径,由软件自动对飞行计划进行优化,在此基础上,根据提高飞行效率、减少基站迁站次数的原则,对飞行计划进行人工调整。测区高程基准为1985国家高程基准,测区内最高约39.7 m,最低约23.5 m,地面采样距离容许差小于30%。测区最终划分为6个飞行架次,飞行高度约380 m,飞行总时间为2 h 42 min(如图3所示)。
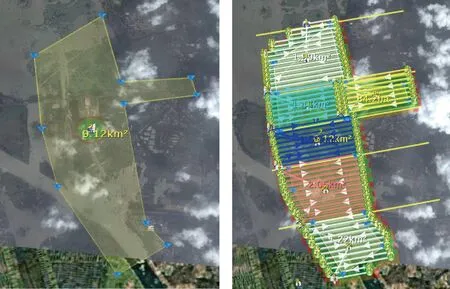
图3 飞行区域与飞行航线设计
2.2 数据后处理
(1) 免相控数据预处理:天狼星无人机在飞行过程中采集相片的同时进行RTK测量,每一张相片的位置信息都具有RTK固定解的精度,通过整合精密测时和高精度定位技术,使得天狼星在空中即可完成传统的地面控制,数据匹配结束只需选择坐标系统,输入基准站控制点坐标即可。
(2) 后处理软件采用俄罗斯Agisoft公司研发的3D扫描软件Agisoft PhotoScan。这是一款基于影像自动生成高质量三维模型的软件,它根据多视图三维重建技术,可对任意照片进行处理,小到考古摆件,大到大量航片数据处理,软件仅通过导入具有一定重叠度的数码影像,便可实现高质量的正射影像生成及三维模型重建。整个工作流程,无论是影像定向还是三维模型重建,都可完全实现自动化(如图4所示)。通过PhotoScan软件对微山湖航拍数据进行处理,生成DOM和DEM产品(如图5、图6所示)。
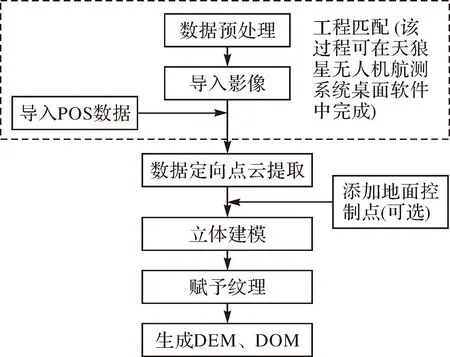
图4 数据处理技术路线

图5 数字正射影像图(DOM)

图6 数字高程模型(DEM)
3 精度分析
选取一个飞行架次的数据进行精度分析。检核点通过现场RTK实测获得,在GPS信号正常、固定解状态下进行测量。检核点均匀分布于整个飞行架次,对每个检核点测量两次,保证检验点精度,精度统计结果见表1。
地形图测量主要精度指标见表2。
高程注记点相对于邻近图根点的高程中误差不应大于相应比例尺地形图基本等高距的1/3,困难地区可放宽0.5倍。根据《1∶500 1∶1000 1∶2000外业数字测图技术规程》(GB/T 14912—2005),校核结果的平面中误差和高程中误差均满足精度要求。

表2 平面位置中误差限差 m
4 效率分析
本次航测工作因受大风天气影响,3 d完成航测任务,4 d完成内业工作,每天航测任务完成后即可将航测数据提交至内业进行处理,内外业可同步进行。而经核算,两个小组采用传统RTK测图方法进行测图需要7 d才可完工,因航测过程中受大风、降雨等天气影响,不能工作的情况是不可避免的,因此本次计算并未扣除因大风导致航测延期完成的时间。经计算,本次无人机航测时间节约率为28.6%(见表3)。

表3 时间效率分析
与传统测图方法相比,利用天狼星无人机航测系统进行航测,不仅可以提高工作效率,缩短工期,还能够大大减轻外业工作量,外业工作人员仅需要对内业成果进行调绘即可完成整个测图工作。当水利工程项目测图范围较大时,上述时间节约率还可进一步提高。
5 结 语
天狼星无人机航测系统具有起降灵活、自动化程度高、安全性好、数据产品精度高的优点,能够很好地应用于水利工程测绘行业。本文通过实际水利工程项目,对天狼星无人机航测系统的测量精度和工作效率进行了验证和分析。经验证,天狼星无人机航测系统产品精度满足水利工程测绘精度要求,提高了测绘工作效率,大大减轻了外业工作人员工作量。未来,随着技术的发展,当天狼星无人机航测系统突破电池电量和信号发射范围的限制,能够实现大范围、长航时航拍时,将能更好地为水利工程测绘服务,也将具有更广泛的应用空间。
[1] 李德伟. 无人机航测成图在水利水电工程中的应用[J]. 城市建设理论建设研究(电子版), 2013(16).
[2] 余江河. 无人机航测技术在应急测绘中的应用研究[J]. 地球, 2015(5):255.
[3] 张雪萍,刘英. 无人机在大比例尺DOM生产中的应用[J].测绘标准化,2011,27(4):25-27.
