TTE在运载火箭控制系统中的应用
2017-08-07许聪张磊凌震
许 聪 张 磊 凌 震
北京航天自动控制研究所,北京100854
TTE在运载火箭控制系统中的应用
许 聪 张 磊 凌 震
北京航天自动控制研究所,北京100854
提出了时间触发以太网(Time-Triggered Ethernet, TTE)在运载火箭控制系统中的应用设想。首先介绍了TTE,从通信机制、时间同步、实时性与容错性等方面分析了TTE在火箭控制系统应用中的优势。针对火箭控制系统的功能组成,提出一种基于TTE的双通道冗余总线拓扑结构,分析了基于TTE的控制系统总线数据流。对TTE在运载火箭中的应用进行了探索,可为TTE在航天领域的研究与应用提供借鉴。
总线技术;运载火箭;控制系统;时间触发以太网
总线作为运载火箭控制系统的“骨架”和“神经”,关系着整个火箭系统的性能和其完成任务的能力,火箭控制系统总线的应用研究受到各国重视。目前国内在运载火箭控制系统中,大多采用1553B总线、CAN总线等传统总线作为系统的控制和测试总线,很多总线系统的总线数据负载率在50%左右,接近总线允许负载率上限,难以扩展新功能[1]。随着未来航天技术的发展,对于越来越多的设备子系统间大量的数据传输应用,传统总线直接面临2个方面的问题:
1) 1553B总线1Mbps的带宽已无法满足现代系统应用的需求;
2) 新的运载火箭等航天设施内部正在增加大量的包括音频视频采集、存储及传输等子系统,传统总线难以对这些子系统进行有效的管理和控制。
为了解决以上问题,对实时以太网技术TTE进行研究,在此基础上设计基于TTE的运载火箭控制系统总线系统,分析基于TTE的火箭控制系统通信网络。探索TTE在运载火箭控制系统中的应用,为TTE在航天领域的研究与应用提供借鉴。
1 TTE简介
TTE是在标准IEEE802.3以太网上实现的时间触发网络协议,它的核心是定义了如何在标准的以太网中实现高精度的时钟同步,并提供高传输带宽,以满足大数据量实时通信的需求。国际汽车工程师学会(Society of Automotive Engineer, SAE)已于2011年11月形成并发布SAE-AS6802“时间触发以太网标准”。TTE在运载火箭应用中主要具有以下优势:
1) 高宽带:支持100Mbps和1Gbps的传输带宽,未来可扩展向10Gbps,可以满足未来大容量火箭系统及其他航天器的总线带宽需求;
2) 实时性与确定性:采用时间触发机制,在设计阶段已经将总线资源与任务调度计划制定完毕,系统中每个节点都在预定时间段使用资源,提供一种能以固定的端到端延迟和微秒级时延抖动进行确定性消息传递的服务;
3) 容错性与可靠性:在通信过程中,一个网络节点的故障不会影响整个网络的服务及数据传输。抖动时间可达到微秒级,实时可靠性高,非常适合于高可靠性要求的航天应用场合;
4) 兼容性:TTE兼容了时间触发协议和以太网技术的优势,能够支持多种通信介质,并支持普通以太网、AFDX等多种通信报文。
目前TTE已在国外航空航天领域得到了应用。NASA通过使用TTE为“猎户座”号多用途载人飞船提供高完整性、高确定性的数据传输网络,确保关键传感器和设备的传输时间和数据响应时间,并通过TTE网络的容错机制保证飞船上数据网络关键接口的可靠性和安全性[2];在航空领域,时间触发技术已经被广泛的接受并应用,包括洛克希德马丁公司的F16发动机控制系统、空客A380的机舱压力系统、波音787的环控和电源系统等。这些都表明TTE在航空航天领域的应用潜力巨大。
2 TTE特性分析
2.1 通信机制
SAE-AS6802“时间触发以太网标准”并不重新定义IEEE802.3标准以太网,它只对标准以太网MAC层以上进行了改造,以支持时间触发通信。通过对链路层的改造,TTE增强了以太网服务的时间确定性,可提供具有高实时性的确定性消息传递服务。TTE具有灵活的时分多路复用的带宽划分,如图1所示,以太网带宽之上的灰色部分对应链路层改造的内容,TTE除了支持时间触发(Time-triggered, TT)传输之外,还保留了部分事件触发的异步通信,如速率约束流量(Rate-constrained, RC)和尽力传流量(Best-effort, BE)[3]。在3类流量传输中,TT流量在预定时刻进行通信,其优先级最高,通信实时性最好;RC流量适于实现确定性和实时性比TT流量相对较弱的应用;BE流量的优先级最低。
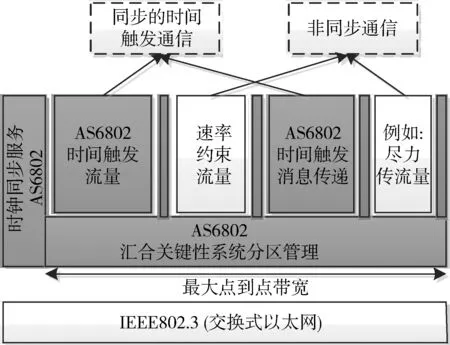
图1 TTE网络的带宽划分示意图
TTE网络由通信节点与TTE交换机组成,网络中的所有操作以全局时间为触发条件。整个网络的通信配置表采取专用工具利用离线方式生成,生成过程中保证所有共享资源互不冲突,在网络中每个节点在某一个时刻最多只有一条消息需要发送,不会出现多条消息竞争使用同一输出链路的情况。
图2为一个简单的TTE网络通信过程,发送端ES1经通道A以3ms为周期发送TT1帧和RC1帧序列,发送端ES2经通道B以2ms为周期发送TT2帧和BE2帧序列。接收端ES3收到经通道C传输的周期为6ms的集成帧序列。当不同类型的数据帧传输发生冲突时,TT数据帧优先级最高,数据传输实时性最好;其次传输RC数据帧;BE数据帧最后传输,实时性最差。
图2 TTE网络通信过程举例
现有运载火箭控制系统大多采用1553B总线,传输带宽低,数据传输通道分时复用,不适合传输大容量数据。另外,在主-从式的通信模式中,从节点的行为受控于主节点,其请求的实时性往往不能保证。相比之下,TTE网络基于以太网技术,传输带宽高,网络中不同的链路通道可并发数据;时间触发机制也保证了系统具有很高的实时性,更加符合未来运载火箭控制系统高带宽、长实时性的应用需求。
2.2 时钟同步协议
根据功能不同,TTE网络中的节点在时钟同步过程可分为3种类型:同步主站(Synchronization Master, SM)、压缩主站(Compression Master, CM)和同步客户端(Synchronization Client, SC)。同步主站是指提供本地时钟参与全局统一时间计算的节点,一般为终端;压缩主站是指对各同步控制器发送的时钟按一定的算法进行表决计算,生成全局统一时间的节点,一般为交换机;同步客户端是指主节点、压缩节点以外的网络节点,只接收统一发布的全局统一时间。
TTE的同步算法由底层硬件实现。同步过程如图4所示:1)同步主站以时间触发方式向压缩主站发送协议控制帧(Protocol Control Frame, PCF),PCF中包含本地时钟信息并记录传输过程中的传输延迟。压缩主站根据这些协议控制帧到达的时间计算一个时间平均值,并形成新的协议控制帧;2)压缩主站同时向同步主站和同步客户端发送新的协议控制帧,二者根据新的协议控制帧矫正自己的本地时钟,实现全局同步[3]。
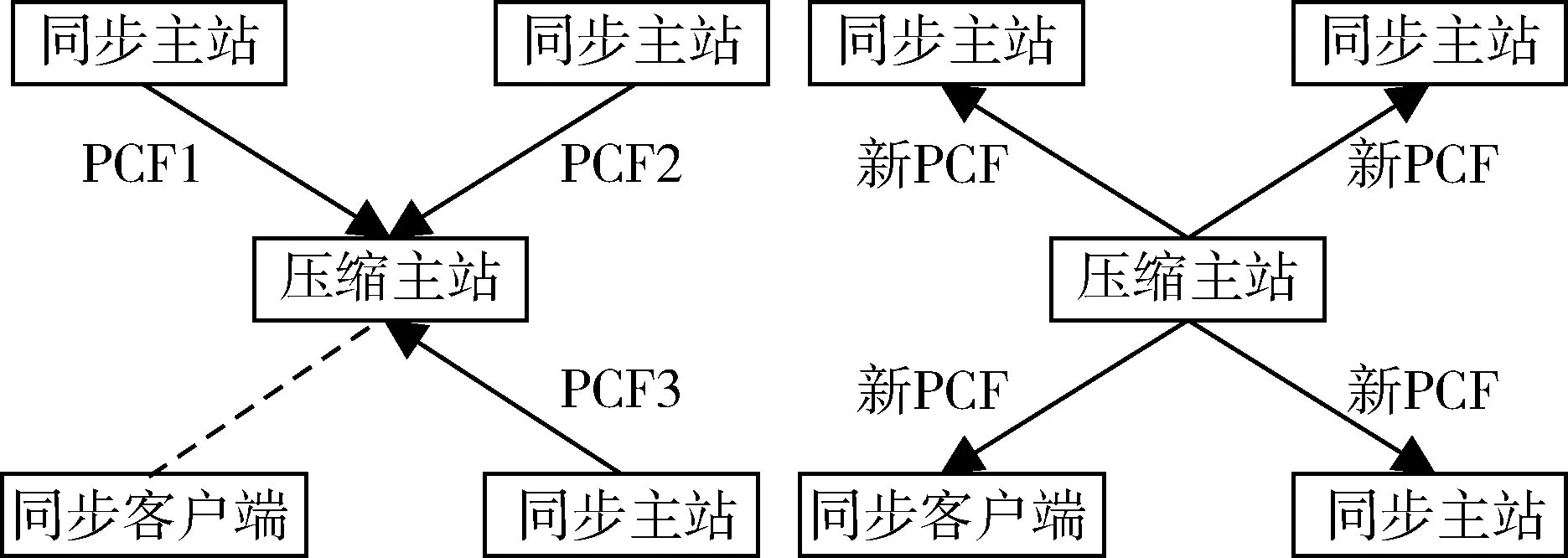
图3 同步流程
总线网络的时间同步对未来大容量数据传输的运载火箭十分重要,其同步精度及容错能力直接影响运载火箭控制系统的各项性能指标。TTE网络中的各节点通过获取网络上的统一时钟同步帧实现全局时间同步,网络同步精度可低于1μs[4]。TTE可为运载火箭控制系统提供高精度的网络同步通信。
2.3 实时性与容错性分析
TTE作为时间触发网络,在实时性、延迟性以及消息竞争方面优势明显。TTE在进行TT数据收发时不会产生冲突,在单跳网络拓扑下,TT数据能实现的数据传输时延<12.5μs,时延抖动<1μs[4]。同时TTE支持各种实时或非实时数据在同一链路通过多种通信报文进行传输,这一特点非常适合于对空间、尺寸及功耗都极其敏感的航天应用。
TTE网络中每个组件都包括一个控制器,也有相应的安全防护机制,即“开关”,各设备通过“开关”连接到网络中,当某个组件发生故障而不能正常收发数据或一段时间内未在指定的时隙发送数据时,“开关”可以通过交叉比对监测到错误,通过控制器将相应的节点关闭,控制故障节点的数据不发送到网络上,从而避免了对其他节点的影响和故障的扩散,提高了整个系统的容错性能[5]。此外,TTE也可以冗余备份的方式提高系统的可靠性与容错性,这也是目前运载火箭采用的主要容错技术。通过这2种容错技术,TTE可以提供高可靠的网络通信。
3 在火箭控制系统中的应用设想
3.1 控制系统组成和功能
控制系统由制导系统、姿态控制系统、飞行控制系统和测试发射控制系统组成(图4)。控制系统的主要任务包括:在发射前对运载火箭进行可靠、准确地检测和发射;对运载火箭实施姿态控制,保证在各种条件下的飞行稳定性;控制运载火箭将有效载荷送入预定轨道,保证入轨精度符合要求。
目前完成上述功能的测试发射控制系统主要由以下设备组成:测发控计算机、信号采集与转换设备、监视通信设备、指挥监控设备、瞄准设备和检测设备等;飞行控制系统主要由以下设备组成:箭载计算机、惯性测量设备、各级遥测站点、各级综合控制器和各级伺服控制器等。
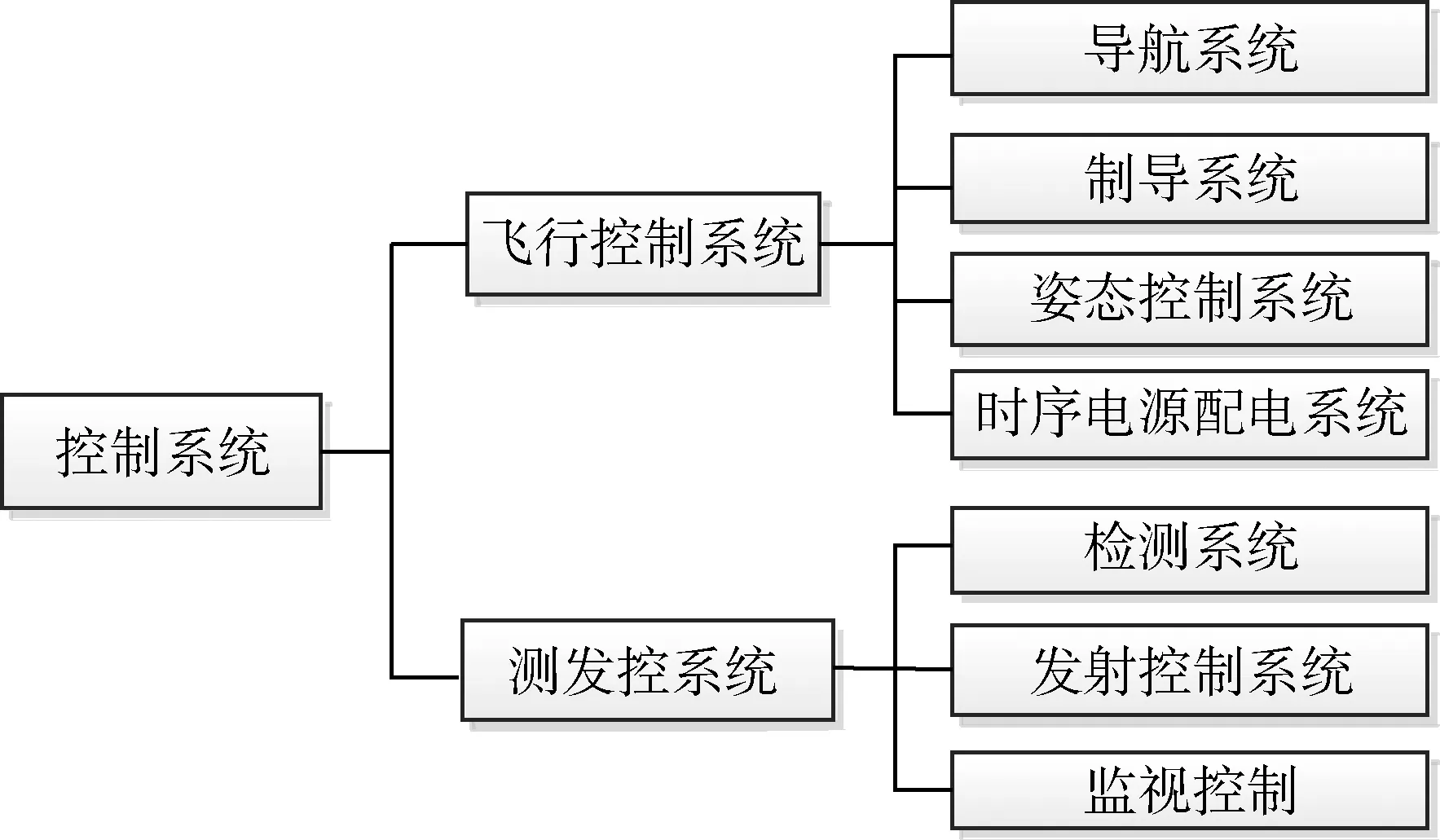
图4 运载火箭控制系统组成
3.2 系统拓扑结构设计
系统总线拓扑结构的确定是系统设计的首要工作,它体现了运载火箭控制系统中各个设备互联的物理映像及它们之间数据传输的相互关联性。典型的TTE总线系统采用网络式拓扑结构,它采用单通道的网络,也可以采用双冗余、多冗余通道网络。图5所示为采用双冗余通道网络的一个例子,其中数值为101~105,表示TTE终端设备,是同步网络中的同步主站(SM);201和202表示网络中互为冗余的TTE交换机。
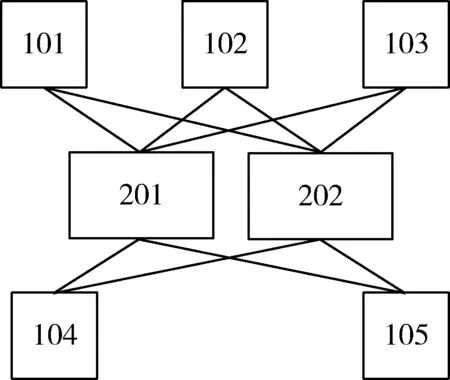
图5 典型TTE网络拓扑结构
以某型号火箭(二级火箭)为例,基于TTE的运载火箭控制系统总线拓扑结构如图6所示,飞行控制系统、测试发射控制系统的终端设备分别连接到3台TTE交换机并组网。总线系统采用双冗余网络式拓扑,控制系统中的终端设备和总线通道采用双冗余的总体方案:控制系统终端设备可以通过双通道和交换机连接,总线的双通道通过不同的交换机连接。控制系统系统级冗余结构不仅提高了网络通信的可靠性,还不会对火箭系统的体积、重量等造成严重的负担,是运载火箭控制系统总线常用的冗余方案之一。
飞行控制系统的终端设备以及测试发射控制系统中的部分终端设备对实时性要求较高,这类需要被实时控制的终端设备通过标准TTE控制器(Standard TTE Controller, STEC)接入TTE总线网络,它们支持TT,RC和BE传输;而其它不需要被实时控制的终端设备通过标准以太网控制器(Standard Ethernet Controller, SEC)接入TTE总线网络,它们只传输RC和BE流量。
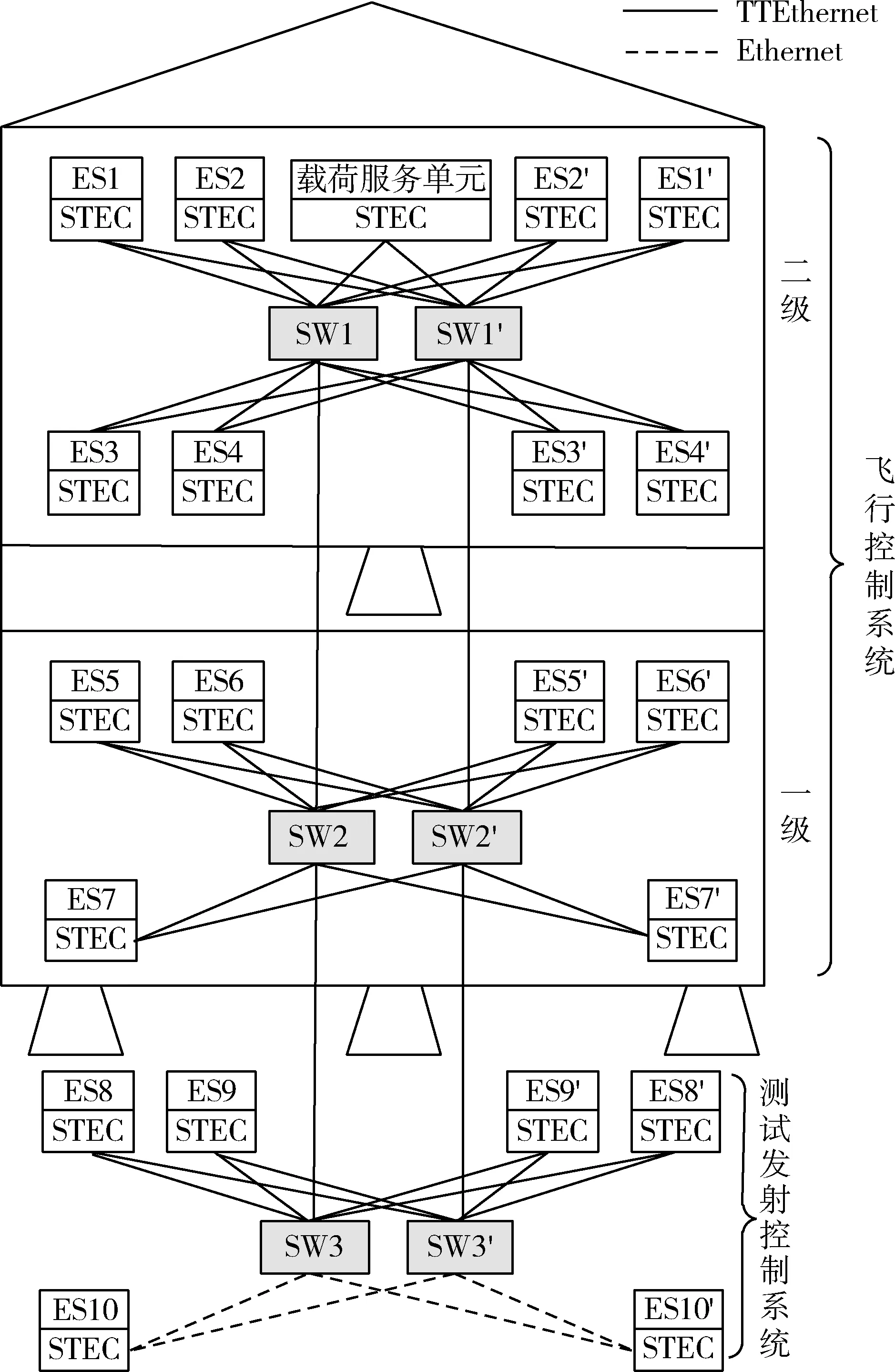
图6 基于TTE的系统拓扑结构
3.3 系统总线数据流分析
运载火箭的发射与飞行过程可简单分为地面测试阶段和飞行阶段。从地面测试阶段到飞行阶段存在弹地分离,飞行阶段又存在一级分离和二级分离,物理结构的改变导致火箭控制系统数据流随之改变。
运载火箭控制系统的信息大致分为2类:1)控制信息,对实时性和可靠性的要求较高,一旦出现故障就可能导致飞行失败,控制信息是总线传输的核心;2)测量信息,主要是给其它系统使用。显然系统总线要优先保证控制信息的传输[6]。
火箭控制系统的数据流在地面测试阶段和各级飞行阶段都有所不同。在飞行阶段主要包括: 1)飞行参数测量终端向箭载控制计算机传送的敏感信息; 2)箭载控制计算机向执行机构终端传送的指令信息; 3)各终端输出的提供给测量或其它系统的信息; 4)箭载控制计算机发送的总线控制用信息等。
在地面测试阶段除包括上述飞行阶段的各类信息外,还包括: 1)各终端的自检测和检测信息;2)箭载或地面计算机的指令信息; 3)地面向各终端发出的测试信息; 4)射前装订信息等。
3.3.1 地面测试阶段
在地面测试阶段,地面设备通过电缆与运载火箭连接。对于图6所示的拓扑结构而言,运载火箭地面测试阶段的控制系统数据流与图6是类似的,3台TTE交换机级联形成总线通道,终端设备通过STEC或SEC连接到总线网络中,除了ES10只能传输RC和BE流量外,其余终端设备都支持TT传输。此时在控制系统总线同步网络中,测试发射控制系统中的TTE交换机SW3作为总线同步网络的压缩主控器,所有控制系统终端设备作为同步主控器,SW2和SW3作为同步客户端。
地面测试阶段总线通道级联的交换机最多,总线网络中的终端设备也最多,除终端设备ES10外,其它终端设备都支持TT流量传输,TTE支持超过1Gbps的传输带宽,可以保证数据流量的确定性和实时性。
3.3.2 弹地分离
运载火箭点火后弹地分离,箭体与测发控设备的物理连接断开,火箭进入飞行阶段。火箭飞行时的遥测、遥控由测控系统实现,箭上控制系统通过遥测站点接收遥测、遥控信息并向测控系统发送自身测试信息。在飞行阶段只考虑箭上控制系统的数据流。
在飞行阶段箭上控制系统总线同步网络中,根据火箭发射前预设置,选择TTE交换机SW1作为箭上总线同步网络的压缩主控器,SW2作为同步客户端,箭上终端设备作为同步主控器,通过总线网络同步形成新的火箭控制系统总线网络。对于图6所示的拓扑结构而言,弹地分离后的火箭控制系统数据流如图7所示。
相比地面测试阶段,飞行阶段的总线通道由2个TTE交换机级联组成,总线网络节点减少,信息的周期性更强。此时控制系统中的终端设备都支持TT流量传输,可以保证流量的强实时性,满足飞行控制系统对实时性的要求。
3.3.3 各级分离
运载火箭发生一级分离后,箭上设备只有火箭二级部分以及载荷服务单元。此时在箭上控制系统总线同步网络中,TTE交换机SW1作为总线同步网络的压缩主控器,二级系统的终端设备作为同步主控器,网络中没有同步客户端。对于图6所示的拓扑结构而言,一级分离后的火箭控制系统数据流如图8所示。

图7 弹地分离阶段控制系统数据流
相比弹地分离阶段,一级分离后总线网络由一台TTE交换机连接剩余的控制系统终端组成,总线网络中没有交换机级联,网络节点进一步减少,总线信息量减小。控制系统终端设备都支持TT流量传输,总线网络中的数据传输可以获得更强的实时性,满足飞控系统对实时性的要求。

图8 一级分离后控制系统数据流
运载火箭发生二级分离后,若载荷与箭体也分离,则箭上控制系统任务已完成;若载荷与箭体仍然连接在一起,此时的控制系统数据流与图8是类似的。
4 结束语
针对现有运载火箭控制系统总线的不足,分析了TTE关键特性及其在火箭应用中的优势,相比传统控制系统总线,TTE采用时间触发机制,实时可靠性高,具有良好的兼容性及安全性。此外其高达1Gb/s甚至更高的传输速率可以满足运载火箭大容量数据实时通信的要求。
作为国际上最新的网络总线技术,TTE技术在航空航天领域的应用具备诸多优势,已经在国外载人飞船飞控系统、航空飞行器航电系统等领域得到应用。国内研究机构已经在网络控制理论、同步算法等方面对TTE展开了相关研究,仍需在控制芯片选择、路由交换机设计和控制网络的测试验证等方面进行深入研究,实现在运载火箭控制系统上的实际应用。
[1] 韦闽峰.新一代运载火箭控制系统总线[J].航天控制, 2007, 25(4): 92-93.(Wei Minfeng.The Newest Technology of Data Bus in Launch Vehicle Control System [J]. Aerospace Control, 2007, 25(4): 92-93.)
[2] 郝燕艳, 潘瑞, 万小磊. 基于TTEthernet的综合电子系统通信网络研究[J]. 航天器工程, 2013, 22(6): 86-87. (Hao Yanyan, Pan Rui, Wan Xiaolei. Research of Integrated Avionics Communication Network Based on TTEthernet [J]. Spacecraft Engineering, 2013, 22(6):86-87.)
[3] SAE AS6802. Time-Triggered Ethernet[S]. SAE Aerospace Standard, 2011.
[4] 刘帅, 张喜民, 郭鹏. TTE通信技术在混合安全关键系统的应用[J]. 航空计算技术, 2013, 43(2): 121-122.(Liu Shuai, Zhang Ximin, Guo Peng. Application of TTE Communication Technique in Mixed Safety Criticality System[J]. Aeronautical Computing Technique, 2013, 43(2): 121-122.)
[5] Steiner W, Bauer G, Hall B, et al. TTEthernet: Time- triggered Ethernet in Time-triggered Communication[M]. Boca Raron: CRC Press Inc, 2011.
[6] 顾胜, 祝学军, 杨华.基于1553B总线的运载火箭控制系统分析[J].导弹与航天运载技术, 2005, (3): 9-12.(Gu Sheng, Zhu Xuejun, Yang Hua. The Analysis of Launch Vehicle Control System Based on 1553B Bus[J]. Missiles And Space Vehicles, 2005, (3): 9-12.)
The Application of TTE in the Control System of Launch Vehicle
Xu Cong, Zhang Lei, Ling Zhen
Beijing Aerospace Automatic Control Institute,Beijing 100854,China
TheideaofTTEappliedtolaunchvehiclecontrolsystemisintroduced.Firsty, TTEtechnologyisintroduced,andtheadvantagesarestudiedforvehicleapplicationandthecharacteristicsofTTEintheviewofthemechanismofnetworkcommunication,timesynchronization,real-timeandfault-tolerantperformance.Accordingtothefunctionandcomponentofthelaunchvehiclecontrolsystem,akindofdual-channelredundantbustopologybasedonTTEisdesignedandthedataflowoflaunchvehiclecontrolsystembasedonTTEisanalyzed.TheresultofthepapercannotonlyshowstheTTEexplorationinlaunchvehicleapplication,butalsoprovidesaguidelineforTTEresearchinthefieldofspaceapplication.
Bustechnology;Launchvehicle;Controlsystem; TTE
2016-06-13
许 聪(1993-),男,山西运城人,硕士研究生,主要研究方向为控制系统实时总线技术;张 磊(1972-),男,河北晋州人,研究员,主要研究方向为导航、制导与控制技术;凌 震(1978-),男,江苏句容人,高级工程师,主要研究方向为测发控系统综合设计。
V448.2;TP336
A
1006-3242(2017)01-0086-06
