挠性陀螺寻北仪解算方法研究
2017-08-07贾智学张小凯任佳婧
贾智学 张小凯 任佳婧
中国航天科技集团公司第九研究院七一Ο七厂 ,宝鸡721006
挠性陀螺寻北仪解算方法研究
贾智学 张小凯 任佳婧
中国航天科技集团公司第九研究院七一Ο七厂 ,宝鸡721006

研究了挠性寻北仪解算算法,首先介绍了寻北仪的组成和算法原理,在此基础上建立了陀螺和加速度计的误差模型。根据二位置寻北方法,分别推导了寻北系统在基座水平和倾斜情况下的寻北算法,试验表明该算法能满足中低寻北精度要求。
挠性陀螺仪;寻北仪;寻北技术方案;误差模型;实验
陀螺寻北仪是一种精密惯性测量仪器[1], 通常用于为火炮、侦察车辆和地面雷达等机动武器系统提供方位参考。近年来,寻北仪在国防军事高科技领域的需求越来越迫切,同时在民用工程中也越来越显示出广阔的应用前景。
寻北技术目前常用技术途径主要包括天文观测法、地磁寻北法[2]和惯性寻北法[3],其中陀螺寻北仪相对其他方式具有独特的优点,寻北测量不受天气、地磁场等外界环境的影响。它利用陀螺仪原理测量地球自转角速率在当地水平面投影方向(即真北方位) 的一种惯性测量系统[4]。挠性陀螺的发展已经非常成熟,相对其他种类陀螺具有精度高、体积小、价格便宜等优点,所以挠性陀螺寻北仪是一种性价比很高的寻北系统。本文针对双轴挠性陀螺仪的优点,主要进行了二位置寻北技术的研究。
1 寻北仪组成及测量原理
1.1 寻北仪组成
寻北仪主要由高精度动力调谐陀螺仪、石英加速度计、陀螺再平衡电路、数据采集电路、信号处理电路、二次电源、显示装置、解算软件和机械转动装置构成,其系统组成框图如图1所示。

图1 系统组成框图
1.2 寻北仪测量原理
寻北仪测量原理是利用陀螺敏感地球的自转角速度,通过解算得到载体某一固定轴与真北方向的夹角即方位角。加速度计敏感地球重力加速度,从而得到载体的俯仰角与滚动角,用于倾斜状态方位解算。陀螺寻北仪寻北方式可以分为连续转动方案、多位置方案[5]和两位置方案等。其中,两位置寻北方案由于其寻北时间短,易于实现而得到广泛应用。陀螺数学模型如式(1)和(2),加速度计数学模型如式(3)和(4)所示:
UgxKgx=Dx0+DxxAx+DxyAy+DxzAz+ωecosLsinφ
(1)
UgyKgy=Dy0+DyxAx+DyyAy+DyzAz+ωecosLcosφ
(2)
UaxKay=Kax0+Aax
(3)
UayKaz=Kay0+Aay
(4)
式(1)和(2)中,Ugx和Ugy为陀螺仪输出;Kgx和Kgy为陀螺仪标度因数;ωe为地球自转角速度率;Ax,Ay,Az为三轴的加速度;L为当地地理纬度;φ为与真北方向夹角;Dx0,Dy0为陀螺仪的常值漂移;Dxx,Dxy,Dxz,Dyx,Dyy,Dyz,Dzx,Dzy,Dzz为陀螺仪与加速度一次方有关的误差系数。式(3)和(4)中,Uax和Uay为加速度输出;Kax和Kay为加速度计的标度因数;Kax0和Kay0为加速度计零偏。
2 寻北技术方案
2.1 坐标系的定义与转换关系
惯性坐标系用来表示惯性空间的坐标系
OXiYiZi,导航坐标系为OXnYnZn,Xn轴与Yn轴在当地水平面内,Xn轴与正东方向重合,Yn轴与正北方向重合,Zn轴沿地垂线指天,因此也称为东北天坐标系,如图2所示。
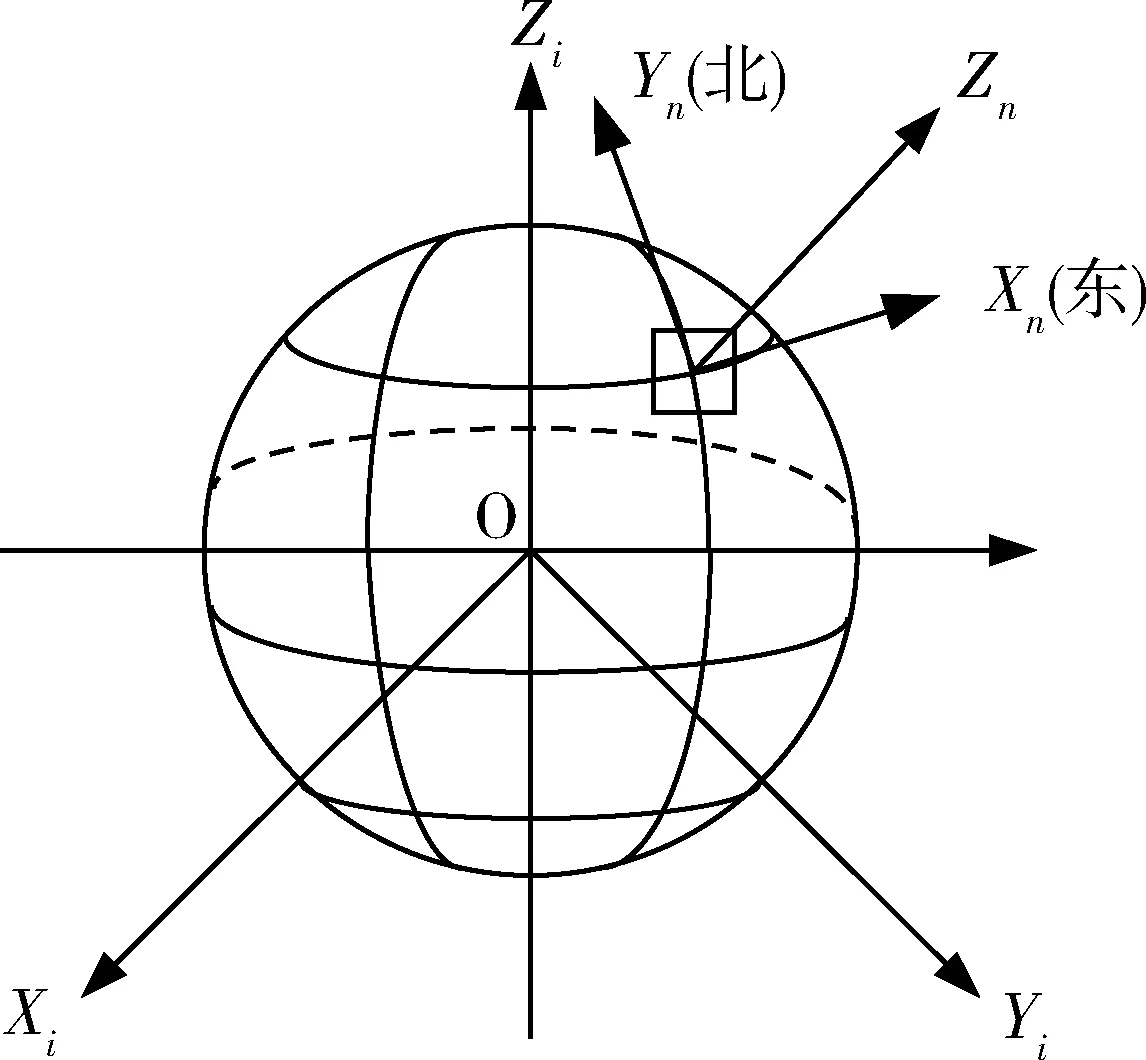
图2 惯性坐标系
载体坐标系OXbYbZb与载体固联,其原点就是载体的重心,Yb轴指向载体的纵轴方向,Xb轴指向载体的右侧,Zb轴与Xb轴和Yb轴构成右手坐标系。
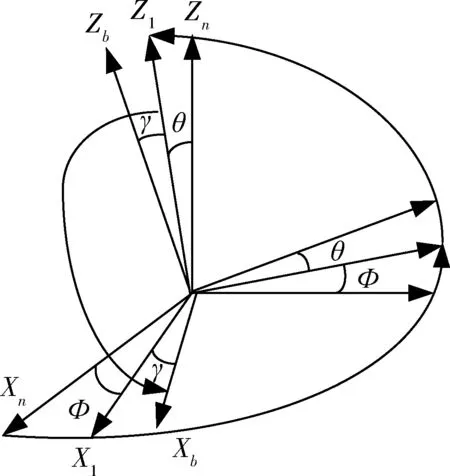
图3 坐标转换图
取东北天为导航坐标系,用OXnYnZn表示;载体坐标系用OXbYbZb表示。首先以OXnYnZn绕OZn轴转动角度Φ,然后绕OX1轴转动角度θ,最后绕OYb轴转动角度γ至载体坐标系OXbYbZb。坐标转换如图3所示。
从导航坐标系OXnYnZn到载体坐标系OXbYbZb转换矩阵如下:
(5)
地球自转角速度在导航坐标系上的投影
(6)
地球自转角速度在载体坐标系上的投影
(7)
重力加速度在导航坐标系上的投影
(8)
重力加速度在载体坐标系上的投影
(9)
2.2 在基座调平状态下寻北
寻北方案按工作状态分为调平状态下寻北和倾斜状态下寻北。两位置寻北时间较短,精度较好,因此广泛采用两位置寻北。 采用两位置寻北方案,根据陀螺的误差模型,将寻北仪转到0°和180°位置时,陀螺仪输出数据之差可以消除陀螺常值误差和与Z向加速度有关的漂移,并对与X向和Y向加速度有关的漂移进行补偿后,计算出地球自转角速度在载体座标系上的投影。
陀螺和加速度计安装方式见图4,陀螺X轴敏感东向角速度,Y轴敏感北向角速度。在水平状态下,X轴和Y轴加速度计输出为0。

图4 陀螺和加速度计安装方式图
根据陀螺仪的输出误差模型,0°位置陀螺输出为
Ugx0Kgx=Dx0+ωecosLsinφ
(10)
Ugy0Kgy=Dy0+ωecosLcosφ
(11)
180°位置陀螺输出为
Ugx1Kgx=Dx 0+ωecosLsin(180+φ)
(12)
Ugy1Kgy=Dy 0+ωecosLcos(180+φ)
(13)
根据式(10)~(13)计算出与真北方向夹角φ为
(14)
1)arctanΦ≥0,φ1>0,φ=φ1;
2)arctanΦ≥0,φ1<0,φ=90°-φ1;
3)arctanΦ≤0,φ1>0,φ=φ1+180°;
4)arctanΦ≤0,φ1>0,φ=360°-φ1。
2.3 在基座倾斜状态下寻北
当基座处于倾斜状态下,X轴和Y轴加速度计输出不为0,与加速度有关误差系数需要补偿,才能提高寻北精度。当基座在倾斜状态下时,0°位置陀螺仪输出为:
Ugx0Kgx=Dx0+DxxAx+DxyAy+DxzAz+ωbx
(15)
Ugy0Kgy=Dy0+DyxAx+DyyAy+DyzAz+ωby
(16)
180°位置陀螺仪输出为
Ugx1Kgx=Dx0-DxxAx-DxyAy+DxzAz-ωbx
(17)
Ugy1Kgy=Dy0-DyxAx-DyyAy+DyzAz-ωby
(18)
由式(16)和(18)相减,计算出地球自转角速度在载体座标系东向角速度投影:

(19)
由式(17)和(19)相减,计算出地球自转角速度在载体座标系北向角速度投影:

(20)
由式(9)计算出俯仰角和横滚角
(21)
θ=-arcsin(AYb/g)
(22)
γ=arcsin(AXb/gcosθ)
(23)
由式(5)~(7)和式(19)~(20)计算出方位角Ф为
(24)
计算后按照基座调平状态的数据处理方法即可得到φ。
式(24)中,ωbx是地球自转角速度在载体座标系东向投影;ωby是地球自转角速度在载体座标系北向投影;θ是载体横滚角,γ是俯仰角;ωe是地球自转角速度(15.041(°)/h);L是当地地理纬度。
3 试验验证
3.1 在基座调平状态下寻北实验
在常温状态下,使转台水平,将寻北仪安装在转台上,分别在20°,70°,150°,270°位置进行寻北实验,试验数据如表1所示。
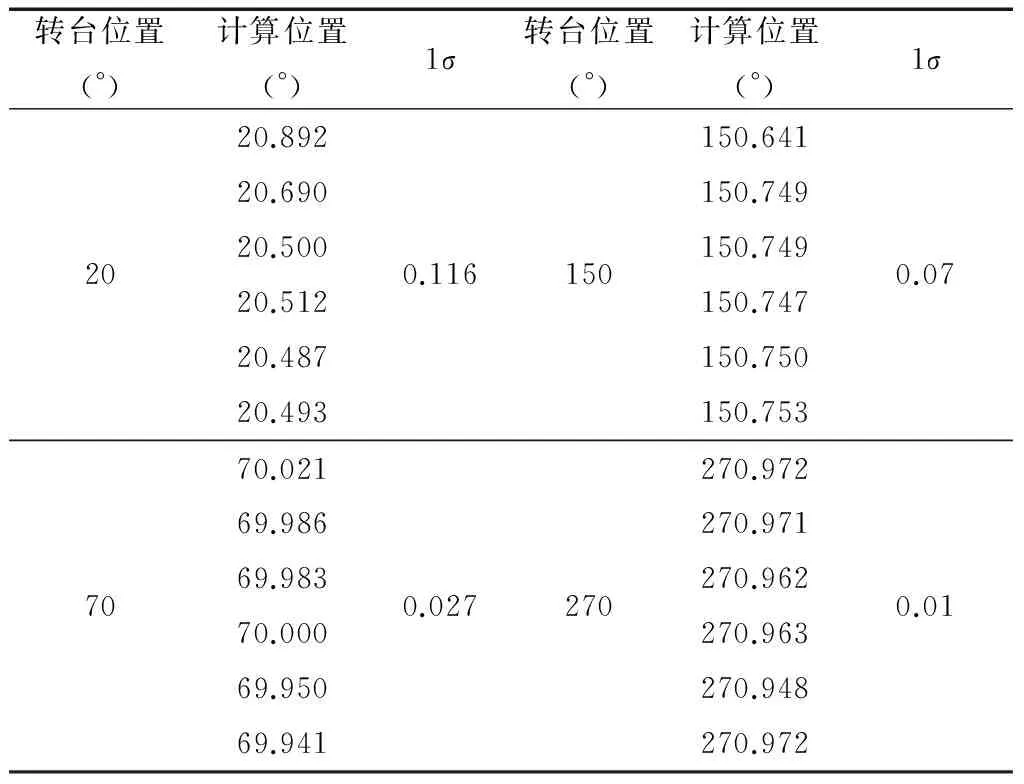
表1 基座调平状态下陀螺实验数据
3.2 在基座倾斜状态下寻北实验
寻北仪在实际工作中不一定是完全水平状态,可能存在一个小角度的倾斜,所以寻北仪的倾斜寻北实验非常必要。实验在-5°倾斜状态下,分别在0°,45°,90°,150° 位置进行,实验数据如表2所示。试验时将寻北装置安装在转台上,利用式(24)解算出寻北结果以及1σ值。
由实验数据可以看出,在倾斜状态下,寻北系统能正确解算出位置信息,实验验证了本文提出的倾斜状态下寻北算法的正确性。
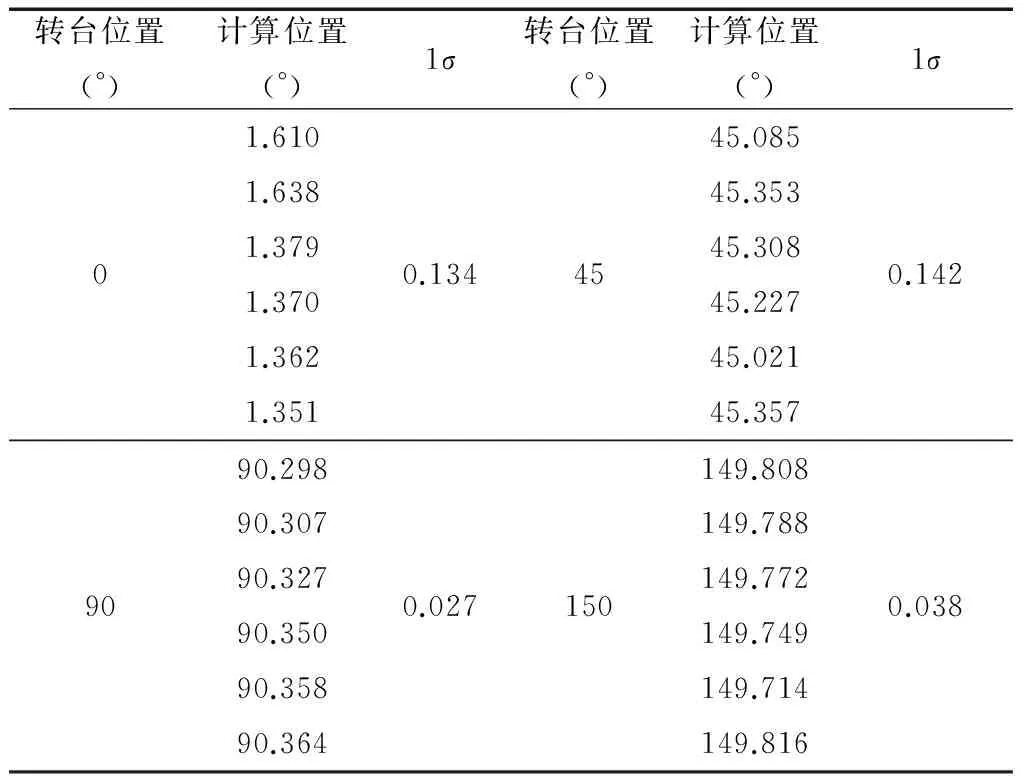
表2 倾斜状态下的寻北数据
4 结论
首先阐述了挠性陀螺寻北仪的基本原理,给出了挠性陀螺寻北仪的数学模型,在此基础上详细讨论了基座处于调平状态和倾斜状态2种情况下的解算算法,试验结果证明,文中建立的数学模型、寻北仪解算方法均能满足中低精度寻北要求。
[1] 白云超,李学琴,马小辉,田育民. 采用旋转调制技术的高精度寻北方案[J]. 中国惯性技术学报,2010,18(4):421-424.( Bai Yunchao, Li Xueqin, Ma Xiaohui, Tian Yumin.High Precision North Seeking Scheme Based on Rotation Modulation [J] .Chinese Journal of Inertial Technology, 2010,18(4):421-424.)
[2] 王立冬,刘 军,鲁 军.多位置寻北误差与陀螺数据采样时间的关系[J].中国惯性技术学报,2011, 19(3):286-289.(Wang Lidong, Liu Jun, Lu Jun. The Relationship between Multiposition North Seeking Error and Gyro Sampling Time [J] .Chinese Journal of Inertial Technology, 2011, 19(3):286-289.)
[3] 卜继军,魏贵玲,等. 陀螺寻北仪二位置寻北方案[J].中国惯性技术学报,2002, 10(3):46-49.(Bu Jijun, Wei Guiling, et al.Neither-north-seeking Scheme of Gyro North Finder [J] .Chinese Journal of Inertial Technology Chinese Inertial Technolog, 2002, 10(3): 46-49.)
[4] 陆元九.惯性器件[M]. 北京:国防工业出版社, 2002.(Lu Yuanjiu. Inertial Devices [M]. Beijing: National Defense Industry Press, 2002.)
[5] Titterton D H, Weston J L. Strapdown Inertial Navigation Technology[M]. Peter Peregrinus Ltd., on behalf of the Institution of Electrical Engineers, London, United Kindom, 1997: 268.
Research on Solver Algorithm for Flexible North Finder
Jia Zhixue,Zhang Xiaokai, Ren Jiajing
Ninth Academy of China Aerospace Science and Technology Company Institute 7107 Factory, Baoji 721006, China
Theflexiblenorthfindersolveralgorithmisstudiedinthispaper.Firstly,theprinciplesofcompositionandalgorithmofnorthfinderareintroduced,andonthebasisoftheestablishmentoftheerrormodelofgyroscopeandaccelerometer.Regardingthetwo-positionnorth-seekingmethod,thenorth-seekingalgorithmisderivedforthenorth-seekingsysteminthecaseofbaselevelandinclination,andtheexperimentresultsshowthatthealgorithmcanmeettherequirementsoflowprecisionlevel.
Flexiblegyroscope;Northfinder;Northfindertechnologysolutions;Errormodel;Experiment
2016-09-08
贾智学(1976-),男,陕西宝鸡人,本科,高级工程师,主要研究惯性仪表;张小凯(1967-),男,陕西户县人,硕士,研究员,主要研究惯性仪表;任佳婧(1989-),女,黑龙江佳木斯人,硕士,助理工程师,主要从事导航、制导与控制研究。
TP23
A
1006-3242(2017)01-0082-04