三维激光扫描技术在水利测绘中的应用
2017-06-21河南省水利信息中心
(河南省水利信息中心)
三维激光扫描技术在水利测绘中的应用
□韩慧颖(河南省水利信息中心)
三维激光扫描技术的应用,可以极大地提高测绘的精度和效率,降低野外数据采集强度,更能保障数据的实效性。其具有突出优势的测绘手段为实现智能化水利,尤其是对坐落在地形变化剧烈的深山峡谷中进行水库、水电站坝址区等水利工程的大比例尺测图显得更具优势;应用三维测绘技术可以对水利工程进行精准的变形监测、汛情监测,可为决策者提供科学依据。通过对三维激光扫描技术的分析,以期在更广阔的领域中得到应用和拓展。
三维数据采集;高精度;高效率;水库水电站;精准监测
0 引言
三维激光扫描技术(3D Laser Scanning)是测绘与信息领域中的创新性技术,被称为继GPS技术之后的里程碑式的革新,已经在地形测绘、文物保护、城市建筑及工业等多领域中成功地应用,并日渐拓展。
实践表明,三维激光扫描技术是精细化测绘中的最佳技术手段,其具有三大突出优势:一是非接触、无损方式,对扫描对象能实现不可达目标的遥测;二是精度高,能获取扫描对象真实现状的三维数据,尤其是不规则几何外形目标,最高精度能达到几十个微米;三是效率高,最高能达到每秒一百万个点,大大降低了野外数据采集强度,能有力保障其时效性。在努力实现智能化水利的进程中,把三维测绘技术运用到水利建设与管理中来将成为不可或缺的技术手段,尤其是对坐落在地形变化剧烈的深山峡谷中进行水库、水电站坝址区的大比例尺测图显得更具优势。应用三维测绘技术对水库大坝及其他防洪工程进行精准的变形监测、汛情监测,所完成的信息统计分析和虚拟,形成准确、详实的技术成果,可为决策者提供无可置疑的科学依据,必将大大提高防洪保安能力。由于这项技术在水利行业中的应用还处于初级阶段,为此,笔者对三维测绘技术中的几个要点作简要阐述,以期与同仁们一起探讨、创新。
利用三维激光扫描技术进行测绘,其内容主要包括:三维精细扫描、三维数据处理、图件制作三个方面:一是精细扫描:利用现有三维激光扫描,对扫描对象进行三维精细数据采集,作为资料永久存档;二是三维数据处理:对原始扫描数据进行处理加工,为后续工作提供分析依据;三是图件制作:用三维点云模型,制作平立剖面图、特征部位剖面图等,为数据分析提供基础图件。
1 三维扫描数据获取
1.1 现场踏勘
为能够更好地了解扫描目标的实际情况,需要亲自去现场进行踏勘,确定扫描目标物的具体位置,然后根据扫描目标物的空间分布、外部形态、内部架构,绘制现场草图,结合需要扫描的精度和分辨率,大概确定一下扫描站的站数和位置,画出控制网草图。
1.2 仪器准备
针对所要扫描的目标对象,选用合适的三维激光扫描仪,例如RIEGL VZ-1000。
1.3 仪器安置
仪器应尽量安置在平坦处,并做固定处理,确保在扫描时不会出现震荡偏移,以保证仪器的安全和数据质量。为了能够得到要扫描的目标对象的完整空间信息,仪器的安置应尽量避开遮挡物,并使相邻两次扫描站的扫描区域有重叠部分,站点不能设置太远,必须在扫描仪的有效扫描距离内,还必须设置合理的站数,站数如果选择少了,就会出现扫描盲区,拼接后的数据有黑洞,如果站数过多,就会降低扫描效率,增加扫描时间,也会积累拼接的误差,所以应该根据实际情况,设置尽量少且合理的站数,获得最佳的扫描结果。
1.4 标靶布设
为了将多个测站扫描获取的不同坐标系的点云数据拼接到同一坐标系中,以求获得目标对象表面完整的形状信息,合理地布置标靶尤为重要。基本方法与原则:一是每两个测站之间至少应放置3个不在同一直线上的标靶;二是测量标靶的位置要遵循“为下一个测站服务”的原则,尽量做到“多站式兼顾”,即将标靶设置在尽可能多的测站都能扫描得到的位置,以减少标靶数量和点云数据在多站点拼接处理的误差;三是避免遗漏设置标靶。
1.5 扫描目标
在扫描目标对象之前,需要设定分辨率,扫描仪自动扫描,扫描完后自动存储数据,然后移动至下一站,按照作业流程进行下一站的扫描,直至完整获得点云数据。
1.6 数据检查与保存
扫描完成后用图形工作站对扫描数据的完整性进行现场检查,检查合格数据及时保存。若有区域漏扫,则需加站扫描,直至数据完整可用。
1.7 成果形式及精度要求
近景三维数据获取对应的成果为原始三维点云数据;精度为无损方式,获取目标对象的点云数据具有完整性。
2 三维数据处理
内业数据处理主要包括点云预处理、点云拼接、整体点云处理、图件制作等。
2.1 精度要求及控制
一是三维整体点云模型精度与原始点云精度一致;二是在三维点云模型建立各步骤中,通过改进点云简化、三角网建立算法,确保整体三维点云模型精度符合要求。
2.2 点云数据预处理
点云数据预处理是三维激光扫描数据处理中必不可少的步骤,点云数据模型是后续内业处理工作的基础数据,点云数据结果直接影响到后续模型建立的质量,及利用点云模型进行分析、正射影像图及相关图件制作效果。预处理流程如图1所示。
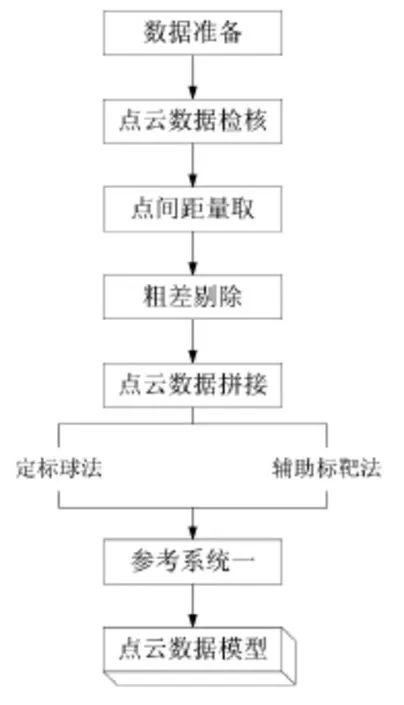
图1 点云预处理流程图
2.2.1 数据准备
准备三维点云原始数据。
2.2.2 点云数据检核
扫描过程中,由于被扫描物体之间的相互遮挡,难免会引起数据的缺失。同时,扫描外界条件因素也可能引起数据的分层。所以,点云数据检核是点云数据预处理中必不可少的一步。若分层严重,则视该数据为不合格数据;若分层较少或不存在分层现象,视该数据合格,少量分层可通过后续点云粗差剔除及去噪操作处理。
2.2.3 点间距量取
点间距量取是指使用三维软件手动抽样进行点云中相邻两点之间空间最短距离的量取。通过点间距量取操作,可检查所获取点云密度是否满足精度要求,并为后续三维模型建立时数据简化步骤提供帮助。点间距应满足精度要求。
2.2.4 粗差剔除
由于测量过程中难免仪器出现一些异常振动、以及镜面反射等原因,在真实数据点中往往混有不合理的噪声点,包含大量的粗差、错误和无关信息,所以有必要对数据进行去噪和平滑滤波的处理。
2.2.5 点云数据拼接
运用专业软件,自动将各站三维点云数据拼接,并检查测站与测站拼接精度,发现问题及时处理。提取目标点云,将多余点云删除,将点云数据分块导出。
2.2.6 参考系统一
由于激光测量机或三坐标测量机自身结构的不足,以及数据处理过程的需要,在某些情况下需要对数据点云进行坐标变换,将所有测站数据统一归并到独立坐标系。根据外业所测得标靶点坐标,可实现点云数据模型转正,便于后续处理。
3 图件制作
主要是通过三维点云模型,按照测量标准制作立面图、剖面图、正射图等图件,表现扫描对象的特征,从而直观反映相关信息,并进行存档分析。
利用AutoCAD软件绘制图件时需包括图廓、图名、文字标注、比例尺等内容,各项要求应符合工程相关规定。
4 结语
三维激光扫描技术的应用提供了更为丰富的成果图件和可视化显示方法,大大减少了前期的数据提取和分析工作,能够深入理解扫描对象的现状信息并且更加有效地管理和保护。
编辑:左英勇

TP206
:B
:1673-8853(2017)05-0089-02
2017-04-17