考虑磁路饱和的IPMSM电感辨识算法及变参数MTPA控制策略
2017-06-19夏超英
李 峰 夏超英
(1.天津大学电气自动化与信息工程学院 天津 300072 2.宁夏大学物理与电子电气工程学院 银川 750021)
考虑磁路饱和的IPMSM电感辨识算法及变参数MTPA控制策略
李 峰1,2夏超英1
(1.天津大学电气自动化与信息工程学院 天津 300072 2.宁夏大学物理与电子电气工程学院 银川 750021)
内置式永磁同步电机(IPMSM)d、q轴电感会随着磁路饱和程度的不同而发生改变,这会降低最大转矩电流比(MTPA)控制的有效性。考虑到定子电流引起的磁路饱和及交叉饱和效应的影响,提出了相应的d、q轴电感辨识算法和变参数MTPA控制策略。采用基于旋转高频电压注入的d、q轴电感辨识算法可在其他电机参数未知的前提下得到不同负载条件下的d、q轴电感;变参数MTPA控制策略能够充分利用标幺值化处理的优势,在转矩-最优电流控制表不变的基础上,只需根据实际d、q轴电感更新电流基值和转矩基值便可克服电感变化带来的不利影响,并实现一定转矩条件下的最佳MTPA控制。最后在电机控制实验平台上通过实验对提出的电感辨识算法和变参数MTPA控制策略的可行性和有效性进行了验证。
内置式永磁同步电机(IPMSM) 磁路饱和 电感辨识 最大转矩电流比(MTPA)控制 标幺值
0 引言
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)具有体积小、功率因数高、效率高、调速范围宽、运行可靠、易维护等许多优点,因此被广泛应用于电动汽车驱动、伺服控制、家用电器等对性能要求较高的领域[1-5]。
IPMSM驱动系统采用最大转矩电流比(Maximum Torque Per Ampere,MTPA)控制、弱磁控制、无速度传感器控制等先进控制算法都必须准确地知道电机参数,但这些参数(定子相电阻、转子永磁体磁链和d、q轴电感)会随着运行条件的改变而发生变化,如相电阻和永磁体磁链主要受温度变化的影响[6,7],d、q轴电感不仅受定子电流引起的饱和效应的影响,还受交叉饱和效应的影响[3,7-9]。为了减小电机参数变化对控制性能的影响,需要对电机参数进行辨识。由于电感参数对电机运行性能影响较大,因此国内外学者提出了多种辨识方法。文献[10-12]提出了几种离线电感辨识方法,在考虑磁路饱和效应的基础上能够获得不同d、q轴电流条件下对应的 d、q轴电感,但忽略了交叉饱和效应的存在。此外电机运行时一些不可控或不确定的因素(如温度、退磁等)也会引起电感参数变化。为了解决这些问题,学者们提出了许多在线参数辨识方法,如递归最小二乘法[13]、模型参考自适应[14]、神经网络算法[15]、遗传算法[5]等。但是在线辨识算法需要权衡收敛性、复杂性和计算量等多方面因素,因此采用以上复杂程度高或理论性强的辨识算法快速而准确地找到电感参数的最优估计值往往非常困难。
为了在恒转矩范围内最大限度地利用磁阻转矩,目前IPMSM驱动系统大多采用MTPA控制,可使电机在满足转矩输出要求的条件下,定子电流最小。然而电机运行过程中参数的变化,尤其是d、q轴电感的变化,会使实际工作点偏离电流最优值,从而导致电机损耗增加,运行效率降低。为了解决这一问题,一些学者提出将上述在线参数辨识算法与MTPA控制相结合,如文献[7,8,16]分别采用递归最小二乘法和模型参考自适应算法对电感进行在线辨识,然后基于实际电感进行MTPA控制。其中文献[7,16]提出的算法需要将相电阻和永磁体磁链预先设定为设计值才能实现对电感的在线辨识,然而忽略相电阻和永磁体磁链的变化显然会给电感辨识结果带来一定误差;文献[8]提出的方法需要在d轴叠加高频电流信号才能依次完成对永磁体磁链和d、q轴电感的辨识,不仅需要设计合适的带通滤波器,而且对参数进行逐个辨识的处理方式还会产生累计误差,使最后得到的q轴电感产生较大误差。此外,文献[7,16]提出以多项式拟合方法来近似替代最优d、q轴电流计算过程,虽然可减小计算量,但却降低了计算精度,最终会影响电机效率的提升。
针对以上电感辨识方法存在的问题,本文提出了一种基于旋转高频电压注入的电感辨识算法,该算法无需已知相电阻和永磁体磁链,且可以综合考虑磁路饱和及交叉饱和效应的影响,能够更准确地获得不同负载条件下的d、q轴电感;此外,对文献[17]提出的基于标幺值化处理的MTPA控制进行了改进,充分利用标幺值化处理的优势,在转矩-最优电流控制表不变的基础上,将原先固定的电流、转矩基值转变为可跟随电机实际参数变化的电流、转矩基值,便可克服参数变化带来的不利影响,并实现变参数最佳MTPA控制。最后基于dSPACE电机控制平台,对电感辨识算法和变参数MTPA控制策略的可行性和有效性进行了实验验证。
1 考虑磁路饱和的IPMSM数学模型
在IPMSM中d轴磁路上埋设有永磁体,且永磁体的磁导率接近于空气的磁导率,因此q轴对应的等效气隙比d轴对应的等效气隙短,使得电枢反应引起的磁路饱和主要存在于q轴,所以随着q轴电流增加,q轴电感会明显减小,而d轴电感随d轴电流的变化相对较小,并且一般认为d、q轴电感的变化分别取决于d、q轴电流的变化。实际上d、q轴磁通在定、转子铁心中都有一部分磁路是公共的,会使d、q轴磁场间产生相互影响,并存在交叉饱和效应,即d、q轴电流的改变还会分别引起q、d轴磁路饱和程度的改变,从而使q、d轴电感发生变化。故考虑磁路饱和及交叉饱和效应时,d、q轴电感都是d、q轴电流的非线性函数。
考虑磁路饱和及交叉饱和效应时的IPMSM磁链方程为
(1)
式中,ψd、Ld(id,iq)、id和ψq、Lq(id,iq)、iq分别为d轴和 q轴磁链、静态电感、电流分量;ψd(id,iq)、ψq(id,iq)分别为定子电流产生的d、q轴磁链;ψf为永磁体产生的磁链。
电压方程为
(2)

(3)

电磁转矩方程为
Tem=np{ψf+[Ld(id,iq)-Lq(id,iq)]id}iq
(4)
式中,np为定子极对数。
2 d、q轴电感辨识算法
利用旋转高频电压注入法估计转子位置的基本原理是在IPMSM定子端注入三相对称的高频正弦电压信号,然后通过对高频电流响应信号进行检测和信号处理来获得转子位置信息[18]。本文借鉴以上方法的基本思路,提出了一种基于旋转高频电压注入的电感辨识算法,该算法可以综合考虑磁路饱和及交叉饱和效应的影响,能够获得不同负载条件下的d、q轴电感。
IPMSM在一定负载条件下运行时的磁链方程为(α-β坐标系下)
(5)

(6)
式中,Lαβ为电感矩阵。相应地IPMSM在α-β坐标系下的电压方程为
(7)
式中,uα、uβ分别为α、β轴电压分量。
假设高频注入电压的幅值为Vi,角频率为ωi,则高频电压可表示为
(8)
式中,uαi、uβi分别为α、β轴的高频注入电压分量。

(9)
式中,iαi、iβi分别为α、β轴高频电流响应分量。
根据式(9)可得高频电流响应为
(10)
式中,Ipi、Ini分别为高频电流正、负序分量的幅值,可表示为
(11)
(12)
(13)
式中,id_max、iq_max分别为id、iq的最大值。
最后根据式(1)可得d、q轴静态电感为
(14)
图1为d、q轴电感辨识算法原理。可知获得精确Ipi、Ini的关键在于之前的信号处理过程的有效性,为此本文提出了相应的信号处理方法,其原理框图如图2所示,主要包括纯延时滤波器提取高频信号、延时整形处理和Ipi、Ini获取三个环节。以下将分别对这三个环节进行具体说明。
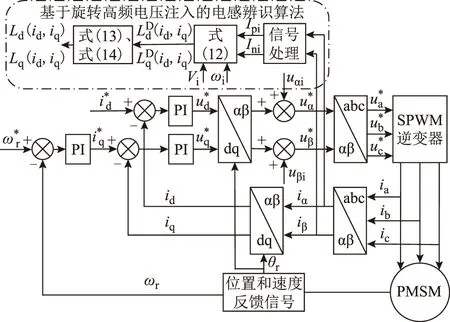
图1 d、q轴电感辨识算法原理Fig.1 Schematic diagram of d-axis and q-axis inductance identification algorithm

图2 信号处理方法原理框图Fig.2 Principle block diagram of signal processing methods
2.1 纯延时滤波器提取高频信号
为了获得Ipi、Ini,首要的任务是必须有效地滤除iα、iβ中包含的基波电流、低次谐波电流、PWM开关谐波电流等,进而提取出由高频电压激励产生的高频电流响应信号。通常采用旋转高频电压注入法对电机转子位置进行估计时普遍使用带通滤波器(Band-Pass Filter,BPF)来提取高频电流信号,然而BPF不仅设计较为复杂,而且还会使高频电流信号的幅值产生一定程度的衰减。若在此采用BPF,由式(10)可知iαi、iβi幅值的衰减直接会影响后续获取Ipi、Ini的准确度,因此本文采用纯延时滤波器[18]来实现对高频电流响应信号的有效提取。
假设α、β轴定子电流为
(15)
式中,iαb、iβb和iαi、iβi分别为基波电流和高频电流响应信号在α、β轴上的分量;Ib、φ分别为基波电流的幅值和初始相位。
分别将iα、iβ延迟半个高频电流信号周期τ1(τ1=π/ωi),然后再将iα、iβ与延时后的电流信号做减法运算,可得
2Ipisin(ωit)-2Inisin(2θr-ωit)
(16)
2Ipicos(ωit)+2Inicos(2θr-ωit)
(17)

4Ipisin(ωit)-4Inisin(2θr-ωit)
(18)
4Ipicos(ωit)+4Inicos(2θr-ωit)
(19)

图3 两级串联纯延时滤波器原理Fig.3 Schematic diagram of two-stage time-delayed filter in series
由式(18)、式(19)可知,经过两级串联纯延时滤波处理后高频电流信号的幅值已增大为原来的4倍,而基波电流信号的幅值减小为原来的k2=-4sin2[ωrπ/(2ωi)]倍。
通常注入的高频信号频率ωi远低于逆变器的开关频率ωs,同时又远高于基波信号频率ωr。当电机转速较低,即ωr与ωi相差非常大时,可使系数k2达到一个非常小的值,也就是说经过两级串联纯延时滤波处理后基波信号会得到极大程度地衰减,此时可认为基波信号几乎被完全滤除,从而得到高频电流响应信号为
iαi=4Ipisin(ωit)-4Inisin(2θr-ωit)
(20)
iβi=-4Ipicos(ωit)+4Inicos(2θr-ωit)
(21)

2.2 延时整形处理
对于已经提取出的iαi、iβi还需要进行延时整形处理,以便为获取Ipi、Ini创造条件。
分别将iαi、iβi延迟1/4个高频电流信号周期τ2[τ2=π/(2ωi)],可得
iαid=-4Ipicos(ωit)-4Inicos(2ωrt-ωit)
(22)
iβid=-4Ipisin(ωit)-4Inisin(2ωrt-ωit)
(23)
再分别对式(20)、式(23)做减法运算和加法运算,可得
(24)
ini=iαi+iβid=8Inisin[(ωi-2ωr)t]
(25)

2.3Ipi、Ini获取
综上所述,使用纯延时滤波器不仅能够有效地从定子电流中提取出高频电流响应信号,而且还可以使其幅值增大,同样后续的延时整形处理环节也具有使高频电流信号幅值倍增的功能,由此可见在实际电感辨识过程中,只需向电机注入较小幅值的高频电压,并采用上述信号处理算法对定子电流进行处理,就能得到幅值倍增的标准高频正弦电流,这样不仅有利于最后采用DFT方法获取更精确的Ipi、Ini,而且还可以有效减小由高频电流分量引起的电机转矩脉动,并降低系统噪声。
3 变参数MTPA控制策略

文献[1,17]提出了基于标幺值化处理的MTPA控制策略,将式(4)用标幺值表示为
Ten=iqn(1-idn)
(26)
式中,Ten为转矩标幺值;idn、iqn分别为d、q轴电流标幺值。且有
(27)
式中,Tb和ib分别为转矩基值和电流基值,并分别定义为
(28)
采用MTPA控制时,电磁转矩与对应最优d、q轴电流的关系为
(29)
对于任一给定转矩,根据式(27)~式(29)可分别计算得到最优d、q轴参考电流。由于该方法仅在电机参数不变的条件下适用,故在此称为固定参数MTPA控制策略。
电机实际运行中,由于温度变化及磁路饱和等因素影响,永磁体磁链和d、q轴电感会发生改变,如果仍采用固定参数MTPA控制,那么在一定转矩条件下定子电流将不再是最小值,从而导致电机损耗增加,运行效率降低。为了获得最佳控制效果,本文对现有固定参数MTPA控制策略进行了改进。首先由式(29) 可知,经过标幺值化处理后的转矩-最优电流关系不再与电机参数有关,也就是说无论参数是否变化,Ten-idn和Ten-iqn之间的对应关系始终不变,因此可根据电机已知参数和式(27)~式(29)计算出不同转矩对应的最优d、q轴电流,由此建立转矩-最优电流控制表并预先存储于控制器中,这样在实际控制时可有效减小计算量,提高控制实时性;其次,对某一电机而言,将原先为固定值的ib和Tb进行重新定义,并表示为
(30)


图4为变参数MTPA控制策略原理框图,其中不同负载条件下的Ld(id,iq)和Lq(id,iq)由查表法得到,所需表格由基于旋转高频电压注入的辨识算法获得的电感与对应的d、q轴电流建立。
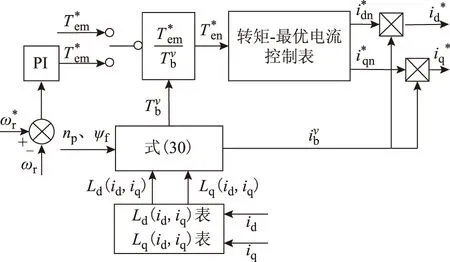
图4 变参数MTPA控制策略原理框图Fig.4 Principle block diagram of variable-parameters MTPA control strategy
4 实验结果及分析
为了验证本文提出的电感辨识算法和变参数MTPA控制策略的可行性和有效性,基于IPMSM实验平台进行了相关实验。图5a和图5b分别为实验平台的实物图和组成框图,主要由PC、dSPACE单板系统DS1103、接口电路、逆变器、直流稳压电源、测功机和被测IPMSM组成。表1为被测IPMSM参数,其中d、q轴电感为磁路未饱和时的值。实验中设置直流母线电压Udc=100 V,死区时间td= 1 μs,IGBT开关频率和相电流采样频率均为10 kHz。
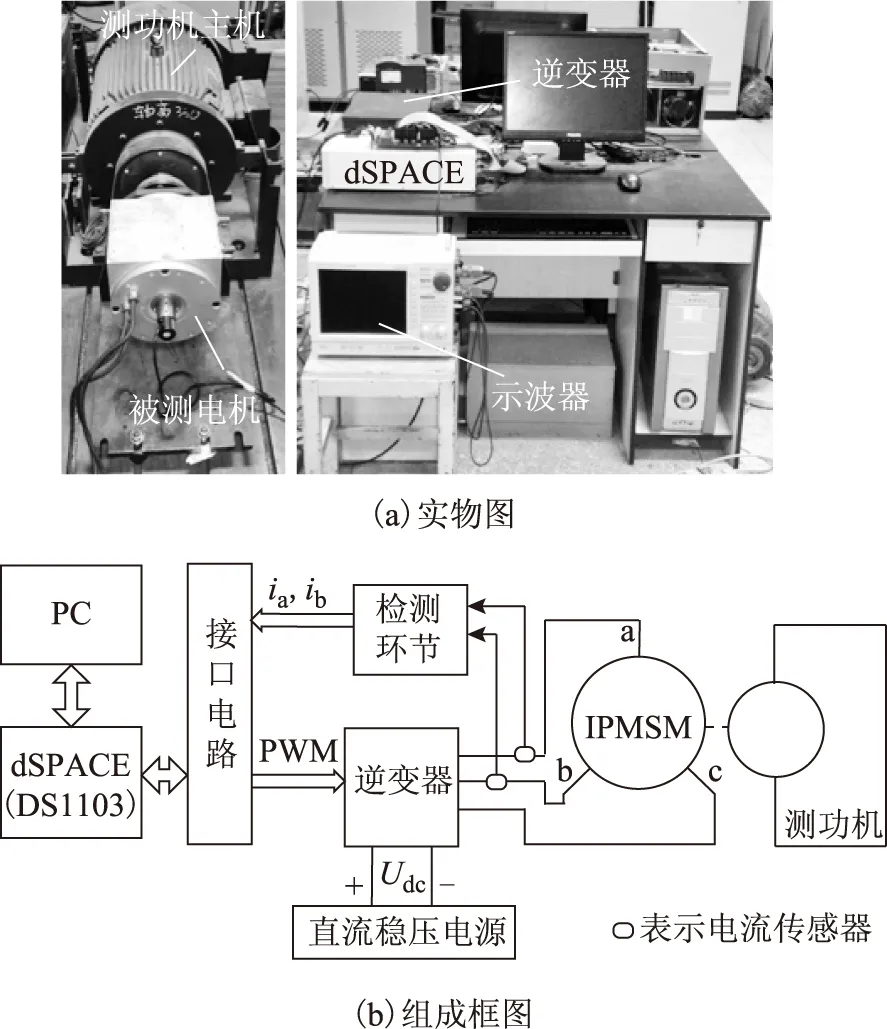
图5 IPMSM实验平台Fig.5 Experimental platform of IPMSM
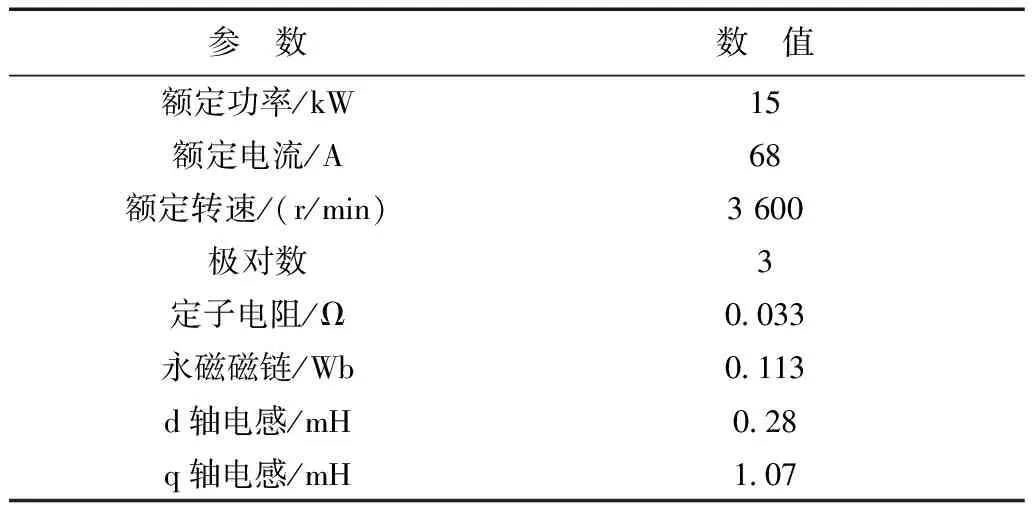
参 数数 值额定功率/kW15额定电流/A68额定转速/(r/min)3600极对数3定子电阻/Ω0 033永磁磁链/Wb0 113d轴电感/mH0 28q轴电感/mH1 07
4.1 d、q轴电感辨识实验
分别在49个id、iq组合状态下进行d、q轴电感辨识实验,图6为id=-30 A,iq=30 A时的辨识实验波形。图6a为纯延时滤波器提取出的α轴高频电流分量iαi的谐波分析结果,可以看到与iαi(基波)的幅值相比,其他次谐波的幅值均非常小,说明采用两级串联纯延时滤波器能够有效地从定子电流中提取出高频电流响应信号。此外,对纯延时滤波器提取出的β轴高频电流分量iβi进行谐波分析也可以得到相同的结论。图6b为延时整形处理后得到的高频电流信号ipi、ini的波形,可以看到它们均为正弦信号,与2.2节的结论一致。图6c为d、q轴动态电感收敛曲线。
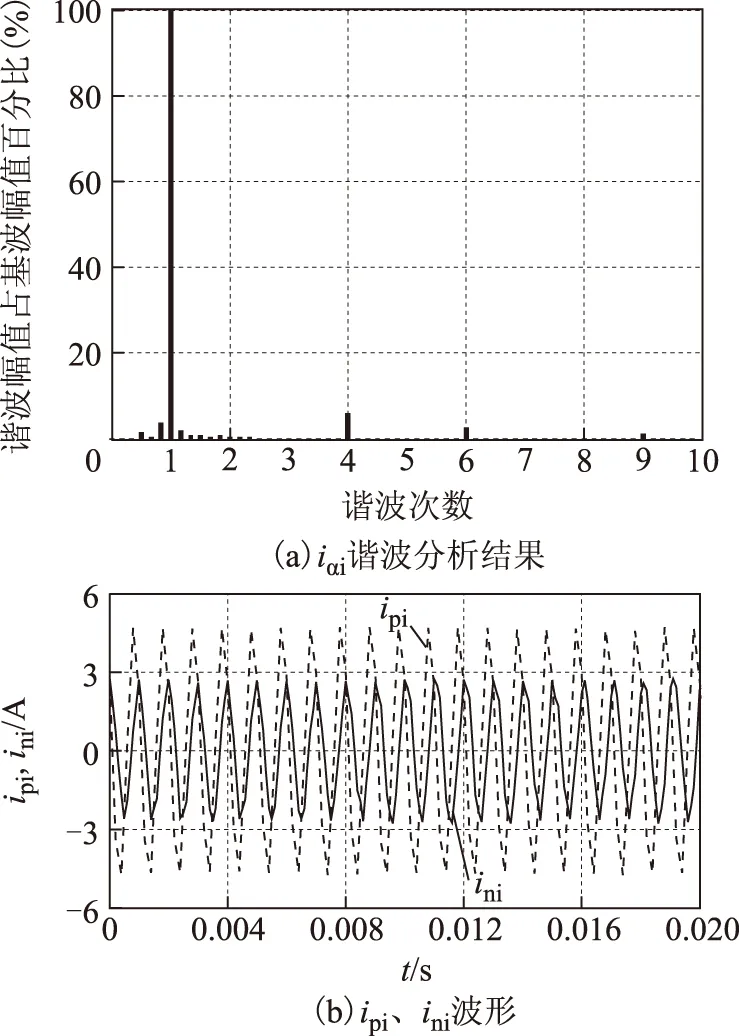

图6 d、q轴电感辨识实验波形Fig.6 Experimental waveforms of d-axis and q-axis inductance identification
图7为电感辨识结果,总体看来在不同负载条件下获得的d、q轴电感辨识值与表1列出的电感值较接近,具有较高的辨识准确度。由图7a可知在同一iq条件下,随着id负向增加,Ld(id,iq)缓慢增加,主要是由于d轴磁路逐渐退出饱和的缘故;而在同一id条件下,Ld(id,iq)随着iq的增加呈现出缓慢减小的趋势,说明Ld(id,iq)还受到交叉饱和效应的影响。由图7b可知在同一id条件下,随着iq增加,Lq(id,iq)明显减小,可见相对于d轴磁路而言,q轴磁路更容易饱和;另外在同一iq条件下,随着id负向增加,Lq(id,iq)也明显增加,说明Lq(id,iq)不仅受交叉饱和效应的影响,而且比Ld(id,iq)受交叉饱和效应影响更为显著。
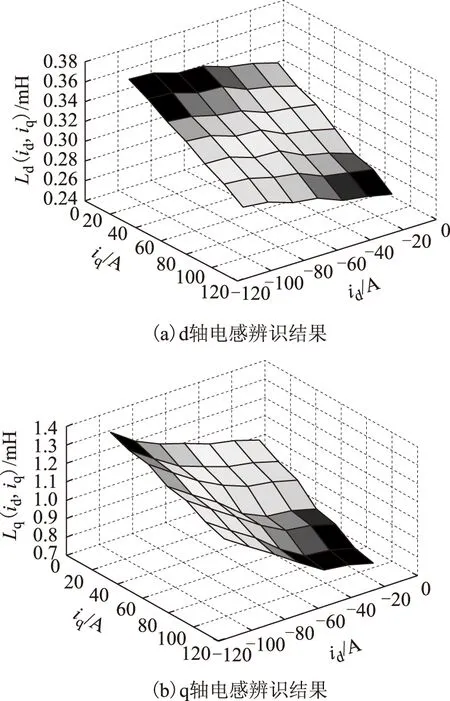
图7 电感辨识结果Fig.7 Inductance identification results
4.2 变参数MTPA控制实验
为了更好地说明电感变化对MTPA控制的影响以及本文提出的变参数MTPA控制策略的有效性,分别在固定参数和变参数条件下进行对比实验。

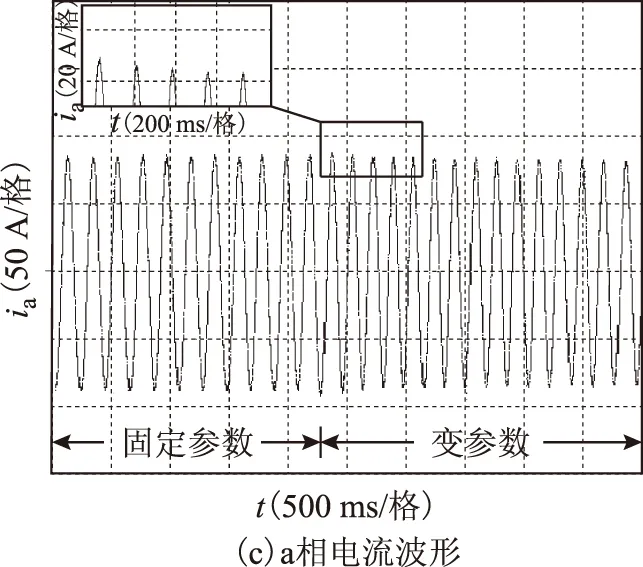
图8 转速闭环控制实验结果Fig.8 Experimental results of rotation speed closed-loop control


图9 转矩控制实验结果Fig.9 Experimental results of torque control
5 结论
提出了基于旋转高频电压注入的电感辨识算法和变参数MTPA控制策略,不同负载条件下的实验结果表明d、q轴电感会随着IPMSM磁路饱和程度的不同而变化,采用变参数MTPA控制策略可在d、q轴电感变化时仍能以最优d、q轴电流进行控制,与固定参数MTPA控制相比,在相同转矩输出条件下能够有效减小定子电流。另外,在转矩控制方式下采用变参数MTPA控制策略还可以有效克服d、q轴电感变化带来的不利影响,始终能够获得较高的转矩控制准确度。本文提出的电感辨识算法和变参数MTPA控制策略具有原理简单、计算量小的优点,在一般IPMSM控制系统已有的软硬件基础上编写相应的程序即可实现,便于在实际中应用。
[1] 唐任远.现代永磁电机-理论与设计[M].北京:机械工业出版社,2011.
[2] Pellegrino G,Vagati A,Guglielmi P,et al.Performance comparison between surface-mounted and interior PM motor drives for electric vehicle application[J].IEEE Transactions on Industrial Electronics,2012,59(2):803-811.
[3] 李峰,夏超英.考虑磁路饱和的内置式永磁同步电机电感参数旋转辨识算法[J],电工技术学报,2016,31(21):203-211. Li Feng,Xia Chaoying.Inductance parameters identifi-cation algorithms of IPMSM under rotating state taking magnetic circuit saturation into account[J].Transactions of China Electrotechnical Society,2016,31(21):203-211.
[4] 符荣,窦满峰.电动汽车驱动用内置式永磁同步电机直交轴电感参数计算与实验研究[J].电工技术学报,2014,29(11):30-37. Fu Rong,Dou Manfeng.D-axis and Q-axis inductance calculation and experimental research on interior permanent magnet synchronous motors for EV[J].Transactions of China Electrotechnical Society,2014,29(11):30-37.
[5] 肖曦,许青松,王雅婷,等.基于遗传算法的内埋式永磁同步电机参数辨识方法[J],电工技术学报,2014,29(3):21-26. Xiao Xi,Xu Qingsong,Wang Yating,et al.Parameter identification of interior permanent magnet synchronous motors based on genetic algorithm[J].Transactions of China Electrotechnical Society,2014,29(3):21-26.
[6] Sebastian T.Temperature effects on torque production and efficiency of PM motors using NdFeB magnets[J].IEEE Transactions on Industry Applications,1995,31(2):353-357.
[7] Quoc K N,Petrich M,Roth-Stielow J.Implementation of the MTPA and MTPV control with online parameter identification for a high speed IPMSM used as traction drive[C]//2014 International Power Electronics Confer-ence,Hiroshima,2014:318-323.
[8] Noguchi T,Kumakiri Y.On-line parameter identification of IPM motor using instantaneous reactive power for robust maximum torque per ampere control[C]//2015 IEEE International Conference on Industrial Technology,Seville,2015:793-799.
[9] Stumberger B,Stumberger G,Dolina D,et al.Evalu-ation of saturation and cross-magnetization effects in interior permanent magnet synchronous motor[J].IEEE Transactions on Industry Applications,2000,39(5):1264-1271.
[10]Ertan H B,Sahin I.Evaluation of inductance measurement methods for PM machines[C]//2012 XXth
International Conference on Electrical Machines,Marseille,2012:1672-1678.
[11]Nakatsugawa J,Notohara Y,Li Dongsheng,et al.Inductance measurement method for permanent magnet synchronous motors using AC with DC bias[C]//18th International Conference on Electrical Machines,Vilamoura,Algarve,2008:1-4.
[12]Stulrajter M,Musak M.Unconventional methods for PM synchronous motor parameters investigation[C]// Proceedings of 9th International Conference,Rajecké Teplice,2012:260-265.
[13]Underwood S J,Husain I.Online parameter estimation and adaptive control of permanent magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2010,57(7):2435-2443.
[14]Liu L,Cartes D A.Synchronisation based adaptive parameter identification for permanent magnet synchro-nous motors[J].IET Control Theory & Application,2007,1(4):1015-1022.
[15]Liu Kan,Zhang Qiao,Chen Jintao,et al.Online multiparameter estimation of nonsalient-pole PM synchronous machines with temperature variation tracking[J].IEEE Transactions on Industrial Electronics,2011,58(5):1776-1788.
[16]Hyunbae K,Hartwig J,Lorenz R D. Using on-line parameter estimation to improve efficiency of IPM machine drives[C]//2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference,Cairns,Qld,2002:815-820.
[17]Jahns T M,Kliman G B,Neumann T W.Interior permanent magnet synchronous motors for adjust speed drives[J].IEEE Transactions on Industry Applications,1986,IA-22(4):738-747.
[18]张立红.基于高频注入法的永磁同步电机无传感器控制系统研究[D].天津:天津大学,2008.
[19]Peter H,Hahn I.Determination of differential inductan-ces of permanent magnet synchronous machines for sensorless control[C]//2011 IEEE International Electric Machines & Drive Conference,Ontario,2011:1579-1584.
(编辑 于玲玲)
Inductance Identification Algorithm and Variable-Parameters MTPA Control Strategy for IPMSM Considering Magnetic Circuit Saturation
LiFeng1,2XiaChaoying1
(1.School of Electrical and Information Engineering Tianjin University Tianjin 300072 China 2.School of Physics and Electronic-Electrical Engineering Ningxia University Yinchuan 750021 China)
The d-axis and q-axis inductance of an IPMSM(Interior Permanent Magnet Synchronous Motor)vary with the change of the magnetic circuit saturation,which may reduce the effectiveness of MTPA(Maximum Torque per Ampere)control.Considering the influence of magnetic circuit saturation effect and cross saturation effect caused by the stator current,an inductance identification algorithm and a variable-parameters MTPA control strategy are proposed in this paper.Using the inductance identification algorithm based on rotating high-frequency voltage injection,the d-axis and q-axis inductance under various load conditions could be obtained without any priori knowledge about other parameters.The merits of per unit system are fully utilized by the variable-parameters MTPA control strategy.Using the strategy,the current base value and torque base value are just calculated and the control table of torque-optimal current need not be changed when the d-axis and q-axis inductance have varied,which could overcome the adverse effect caused by inductance parameters variations and achieve the optimal MTPA control under certain torque condition.Finally,experiments were made on an IPMSM control platform,the feasibility and availability of the inductance identification algorithm and the variable-parameters MTPA control strategy presented were validated by experimental results.
Interior permanent magnet synchronous motor(IPMSM),magnetic circuit saturation,inductance identification,maximum torque per ampere(MTPA)control,per unit system
2016-08-23 改稿日期2017-01-12
TM341;TM351
李 峰 男,1979年生,博士研究生,副教授,研究方向为交流电机驱动控制及应用。
E-mail:peakily@126.com(通信作者)
夏超英 男,1958年生,教授,博士生导师,研究方向为交流驱动控制系统与技术,电力电子技术与装置。
E-mail:xiachaoying@126.com