细长体水下运动空化流场及弹道特性实验*
2017-06-07赵成功魏英杰张孝石
赵成功,王 聪,魏英杰,张孝石
(哈尔滨工业大学航天学院,黑龙江 哈尔滨 150001)
细长体水下运动空化流场及弹道特性实验*
赵成功,王 聪,魏英杰,张孝石
(哈尔滨工业大学航天学院,黑龙江 哈尔滨 150001)
为了研究细长体水下高速运动时空泡的产生、闭合及脱落特性,及影响细长体空泡形态及弹道特性的复杂因素等,初步开展了细长体模型水下高速运动的实验研究,分析了不同初始空化数下细长体模型在水中高速运动的一系列流动现象,重点研究了空泡的发展、闭合、尾部回射流和尾部脱落特性,以及轴对称细长体模型弹道特性与空泡形态变化之间的关系和转动特性随时间的变化历程等。结果表明:细长体水下高速运动时形成超空泡,空泡头部光滑透明,尾部凝结有汽水混合物且有交替脱落的含气漩涡;初始空化数对细长体的速度衰减有所影响;受初始扰动影响,细长体水下运动伴随有绕头部的转动且初始扰动影响细长体俯仰角随时间的变化历程。
多相流;汽化;湍流;细长体;空泡
细长体在水下高速运动时会伴随一系列复杂的流动现象,其表面附近的水会因低压而发生空化现象,当速度足够高时就会形成完全包裹细长体的超空泡。超空泡的形成使细长体在水下运动时的阻力明显减小,从而可大幅度提高细长体的水下运动速度[2]。物体在水下高速运动时空泡的存在对物体的流体动力特性、结构本身和弹道稳定性等都有重要影响[2],且由于空泡的存在导致的流体动力特性与通常的水下运动体的流体动力特性不同,需要深入研究。
P.R.Garabedian[3]等开展了轴对称空泡的理论计算工作;R.Rand等[4]、S.S.Kulkarni等[5]开展了水下超空泡射弹的冲击动力学问题计算;A.D.Vasin等[6]对亚声速可压缩流动中圆盘空化器产生的轴对称空泡开展了计算研究;A.May等[7]将研究焦点集中于物体入水时的空泡变化过程和影响因素的实验与理论计算;M.Ruzzene等[8]研究过水下射弹的结构强度等相关问题。何春涛等[9]开展了入水空泡特性的试验研究;熊天红等[10]对水下超空泡射弹的空泡形态开展了数值研究;杨传武等[11]研究了超空泡水下航行体的动力学性能;张志宏等[12]研究了水下亚音速细长锥形射弹超空泡形态的计算方法和压缩性对超空化流动的影响。近年来,随着高速摄像技术的飞速发展,采用高速摄像的试验手段为水下运动物体的流场特性研究和弹道特性研究提供了更加有效的方法和途径,包括研究汽油喷溅燃烧、入水现象和超空泡流动等。在超空泡研究方面,J.D.Hrubes[13]运用高速摄像试验技术初步研究了水下运动体的空泡形态特性;P.Fabien等[14]等通过高速摄像试验技术初步开展了球形弹丸水下运动的实验研究。
本文中针对细长体模型开展水下运动实验研究,重点研究空泡的形态发展、尾部闭合和脱落特性等;分析不同初始空化数下细长体模型的弹道特性、空泡形态及转动特性随时间的变化历程。
1 实验系统及模型参数
1.1 实验设备
轴对称细长体水下运动实验系统如图1所示,主要包括发射系统、开放式实验水槽、保护和回收系统以及外部测试系统。其中,开放式实验水槽尺寸为1.2 m×1.2 m×10 m,顶部开口,两侧采用较高强度的钢化玻璃,底部和其余侧壁由钢板及相应支架组成;发射系统主要包括高压气瓶、轻气炮、发射管、高压管路系统及触发开关;保护及回收系统包括多层钢丝网和回收池等;外部测试系统包括高速摄像系统、照明系统及炮口激光测速系统。实验系统及细长体模型实物见图2所示。实验过程中采用自来水水源,水深1. 1 m,水温11 ℃,为了保持清澈的水质以使拍摄效果较好,实验前对水槽进行清洁处理。

图1 细长体水下运动实验系统示意图Fig.1 Schematic of experimental facility of slender body underwater movement
图2 实验系统及细长体Fig.2 Experimental facility and slender body
1.2 测试系统
图3 测试系统示意图Fig.3 Schematic of measurement
细长体水下高速运动过程伴随空泡摆动、闭合、脱落等复杂现象,且空泡壁面和细长体弹道特性极易受到外界因素的影响,因此目前还很难通过普通测试技术和手段获得空泡特性及弹道特性,对细长体水下运动空泡特性及弹道特性的实验研究大多采用高速摄像技术。本实验中采用FASTCAM SA6高速相机,帧频为5 000 s-1。高速拍摄过程对光源要求较高,实验中采用6×1 300 W的卤钨灯在视场背侧和上方进行照射并通过毛玻璃进行均匀处理。水槽在对准发射管的地方有一开孔,开孔通过适配器及耐压薄膜进行防漏处理,细长体通过轻气炮发射后,沿着发射管穿过耐压薄膜进入水中运动,在发射管的管口处装有激光测速仪测量细长体的出口速度。轻气炮的电磁阀触发装置与高速相机的触发装置通过控制器进行时序控制,以保证高速相机能够捕捉到细长体运动。测试系统示意图如图3所示。实验中高速相机的拍摄视场为1.2 m×0.8 m,其中沿模型水平运动方向为1.2 m。
1.3 模型参数
实验中采用的细长体模型为平头锥柱结合体,长度为170 mm,头部直径d=4 mm,柱段直径d=10 mm,锥段半锥角为4°,材料为Q235钢,如图4所示。
图4 细长体实验模型Fig.4 Experimental model of slender body
实验主要流程:首先将细长体模型装入适配器内并置于发射管底部,然后向轻气炮的内外气室分别注入高压氮气,通过调节内外气室压力及二者压力差使模型获得不同的发射速度,通过安装于炮口的激光测速仪可以测得模型的出口速度。在发射模型的同时,触发高速摄像系统开始工作,记录模型运动状态。
2 实验结果与分析
结果分析中所采用的坐标系如图1中的xOy坐标系所示,细长体运动方向为x轴正向,垂直向下为y轴正向,细长体模型进入视场时刻为初始时刻t=0 ms,此时的速度作为细长体模型水下运动的初始速度,对应的空化数为初始空化数(空化数σ=2(p∞-pv)/(ρv2),其中p∞为流场远处压强,pv为实验工况温度下水的饱和蒸汽压,ρ为水的密度,v为细长体模型的运动速度)。实验中通过高速相机对射弹入水后的运动状态进行拍摄,对所得到的图像进行数字化处理得到相关空泡形态及速度衰减、位移变化等结果。
2.1 空泡形态特性分析
图5给出了初始速度为212.1 m/s,初始空化数σ=0.004 4的细长体水下运动空泡形态图。空泡发展起始于细长体头部圆台边缘处,并沿着细长体轴线向后扩展。实验时,实验水槽内的水域初始时为静止状态,根据高速相机记录的细长体运动图像可以看出,细长体尾部与空泡壁面未撞击时的空泡壁面光滑透明,未有扰动发生,这说明高速运动的细长体进入水中对流域产生的扰动传播速度小于细长体本身的运动速度。空泡壁面整体光滑、透明,但是由于光线经过空泡壁面不同位置时的折射率不同,图5(a)中的空泡壁面上下两侧有所透明度不同。图5(b)给出了实验空泡形态与Lognovinch独立膨胀原理的对比结果,从图中可以看出,二者吻合较好,除了在弹体尾部附近二者有一定差异。这是由于独立膨胀原理中没有考虑弹体扰动对空泡形态的影响,而实验中空泡形态则受弹体扰动影响,这也验证了本文实验结果的可靠性。
在图5中,细长体模型在空泡内部运动,仅头部与水接触;而某些工况下,模型在空泡内前进的同时具有绕头部的相对转动,使得模型尾部与空泡壁面产生碰撞并反弹回空泡内部继续下一次碰撞和反弹,这一过程称为尾拍运动,如图6所示。图6中细长体模型相较于图5中较小(图6中细长体模型为直径6 mm、长36 mm的圆柱体),使得高速相机能够在同一视场内捕捉到完整空泡并可清晰看到尾拍运动,从图6中可以清晰看到弹体尾部与空泡的撞击。
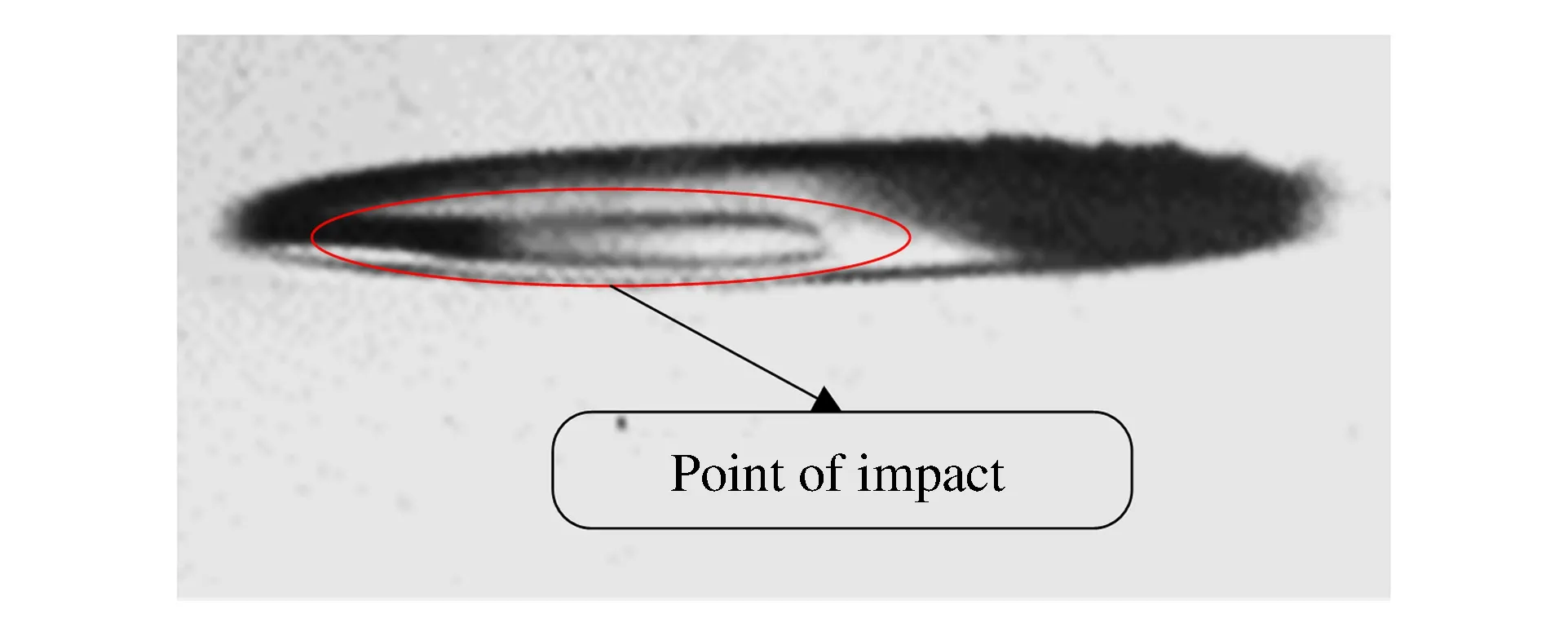
图6 尾拍运动时的空泡壁面形态Fig.6 Cavity characteristics when tail slap occurs
从图6中可以看出,细长体模型发生尾拍运动时,由于模型尾部对空泡壁面的撞击,使得汽水混合物界面不太明显,并凸出于原有光滑的空泡壁面之外,形成凸起。尾拍运动是保持模型在空泡内稳定运动的一种方式[15],由模型发射或入水时的初始扰动或在水中受到的其它扰动引起。过大的扰动容易引起模型不可回弹的转动,破坏模型的运动稳定性,引起弹道失稳,这在实验中也得到了验证,初始空化数σ=0.004 6的细长体水下运动实验由于初始转角过大,弹道在1.5 m距离上迅速失稳。
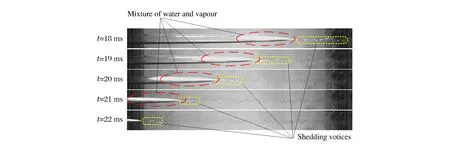
图7 不同时刻空泡尾部的闭合及脱落Fig.7 Closure and shedding characteristics of cavity tail at different times
初始空化数σ=0.004 4的细长体水下运动不同时刻下空泡尾部闭合及脱落情况如图7所示。强烈的回射流导致空泡尾部产生高压区,使空泡内的水蒸汽在空泡尾部出现一定的凝结,因此空泡尾部的透明度和光滑度相较于空泡头部有所下降,在尾部高压区出现较明显的汽水混合物(图7中的椭圆区域)。聚集在空泡尾部高压区的汽水混合物脱离空泡尾部后形成交替脱落的含汽漩涡(图7中圆角矩形区域)并逐渐消失在流场下游远处。图7中从18到22 ms,细长体模型逐渐离开拍摄视场,空泡尾部脱落的含汽漩涡数量逐渐减少,脱落漩涡的震荡程度也减弱,脱离漩涡减少主要是由于随着细长体模型速度的降低(空化数增大),模型表面附近流域的空化程度减弱,液态水的汽化增长率降低,使得进入空泡内部的水蒸汽减少,进而导致空泡尾部脱离的含汽漩涡数量逐渐减少;细长体高速运动时,整个空泡形态呈椭圆状、上下基本对称,说明重力对空泡形态的影响较弱。空泡尾部闭合区域与空泡头部空泡扩展区域有一定的相似性。
2.2 细长体模型水下高速运动弹道特性分析
细长体模型水下高速运动的流体动力学环境比较复杂,因此对弹道特性的研究比较重要;高速运动时细长体模型被超空泡包裹,仅头部与水接触,故超空泡形态的变化也影响着细长体模型的弹道特性。本文中开展不同初始空化数下的细长体模型水下运动实验。实验a:细长体模型初始速度v0=104.1 m/s,初始空化数σ=0.018 1;实验b:细长体模型初始速度v0=193.7 m/s,初始空化数σ=0.005 2;实验c:细长体模型初始速度v0=212.1 m/s,初始空化数σ=0.004 4。

图8 不同初始速度下细长体模型的速度变化Fig.8 Slender body velocities vs. time with different initial velocities
不同初始速度下细长体模型的速度变化情况如图8所示。从图8中可以明显看出,细长体模型在不同初始速度下的速度衰减速率有差异。实验b和实验c中细长体模型初始速度较高,速度衰减较快;而实验a中细长体模型初始速度较低,但速度衰减较慢,速度曲线变化相对平稳。三组实验中细长体模型在运动过程中均被空泡完全包裹,运动时的流体阻力得到明显降低,但是根据不同初始速度下细长体模型的速度衰减速率不同可知,空泡形态,即空泡长度、最大直径及长细比等因素显著影响减阻效果。实验中细长体模型运动速度较快,空泡长度已超出高速相机视场范围,无法测量超空泡长度。图8中的实验b和实验c细长体模型的速度变化率在整个拍摄历程内不是呈均匀递减趋势变化,这是由于实验b和实验c中的模型在运动过程中发生绕头部的微小转动,转动使得细长体模型的尾部与空泡壁面发生碰撞,进而增加细长体模型的流体阻力,导致细长体模型速度的迅速衰减,并且这种现象周期性地发生,从而导致速度衰减不均匀;实验a中的细长体模型受到的初始扰动较小,转动较慢,速度衰减比较平稳。三组工况在t=4 ms时的模型运动对比见图9所示。
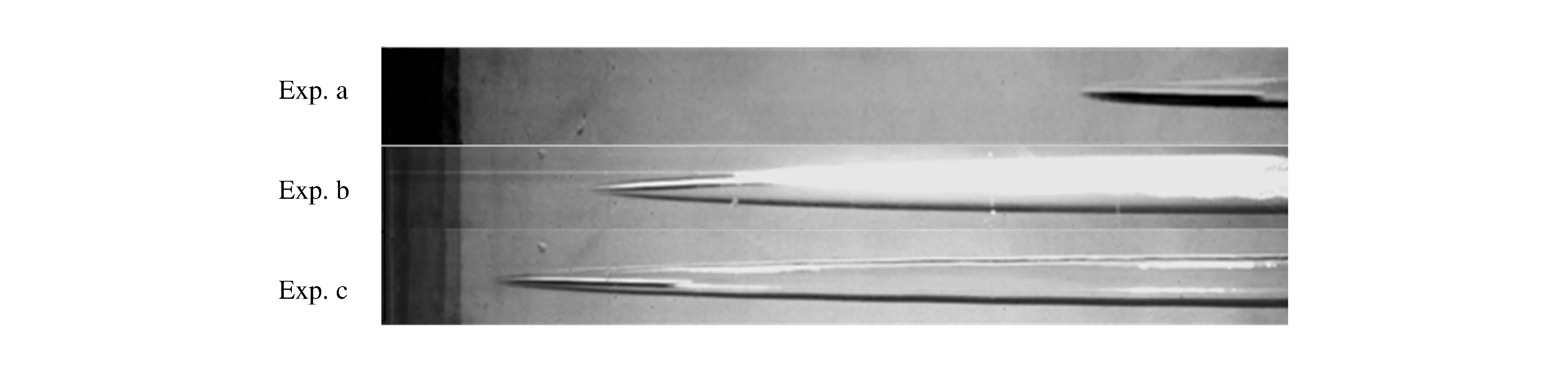
图9 三组工况下当t=4 ms的模型运动对比图Fig.9 Comparison of underwater slender body movement in three different conditions (t=4 ms)
图10和图11分别为不同初始速度下细长体模型的水平位移和垂直位移变化。从图10中可以看出,细长体模型的水平位移增加过程中伴随波动(但是这种波动较小,主要是由于高速相机视场有限,拍摄时间较短,故这种波动不太明显),这是由于细长体模型尾拍撞击空泡壁面引起速度的非均匀变化。从图11中的三种工况对比可以看出,在细长体模型高速运动时,重力作用相较于惯性力作用较小,细长体模型的垂直位移变化很小,故在研究高速运动物体时,可以忽略重力效应;图11中实验a中细长体模型的速度约为实验b、c中细长体模型速度的一半,而垂直位移却达到后者的6~7倍。从图11中垂直位移的波动也可以明显看出,实验b、c中细长体模型的转动较明显,而实验a中的尾拍现象较弱。
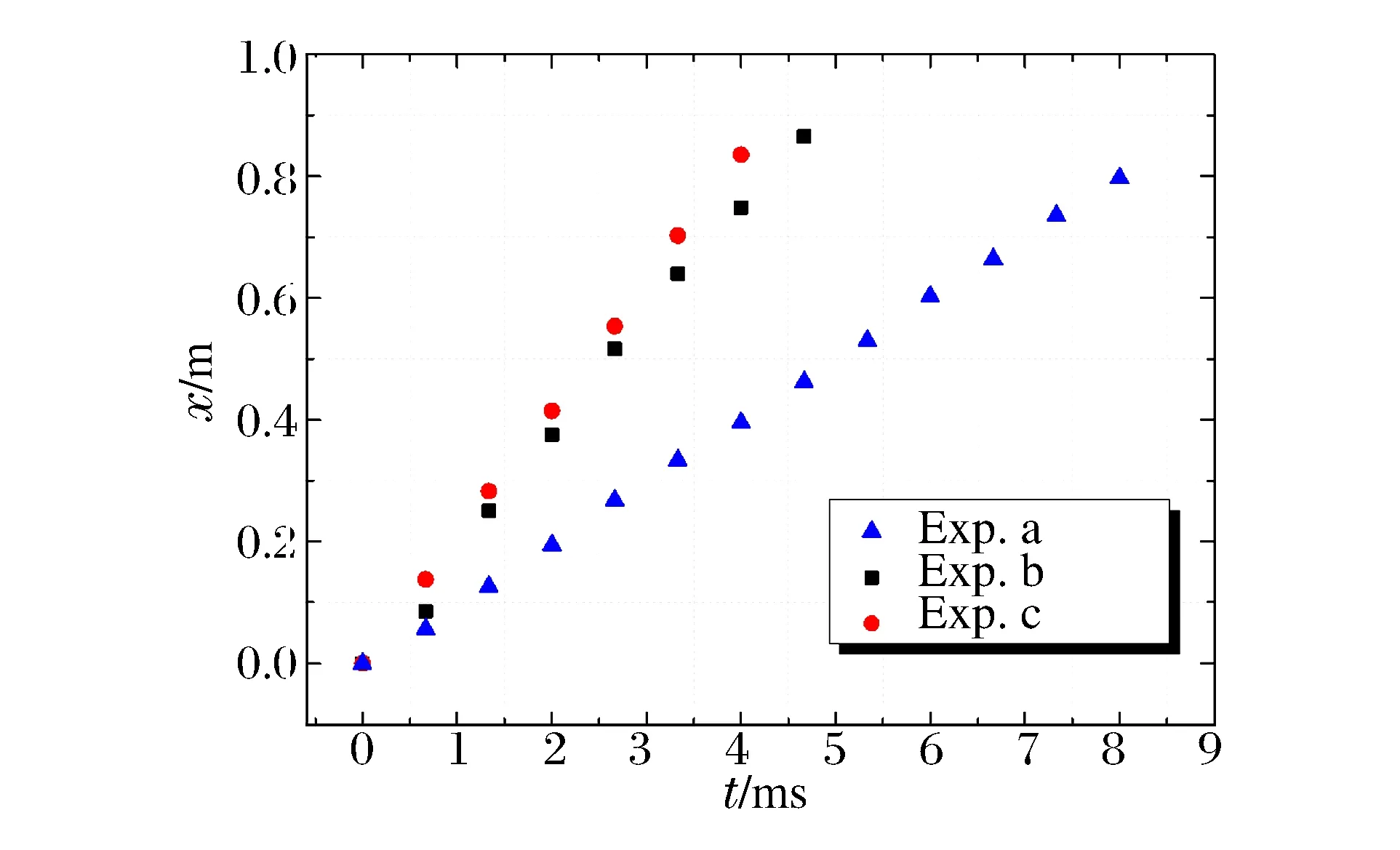
图10 不同初始速度下细长体模型的水平位移变化Fig.10 Slender body trajectories in x direction vs. time with different initial velocities
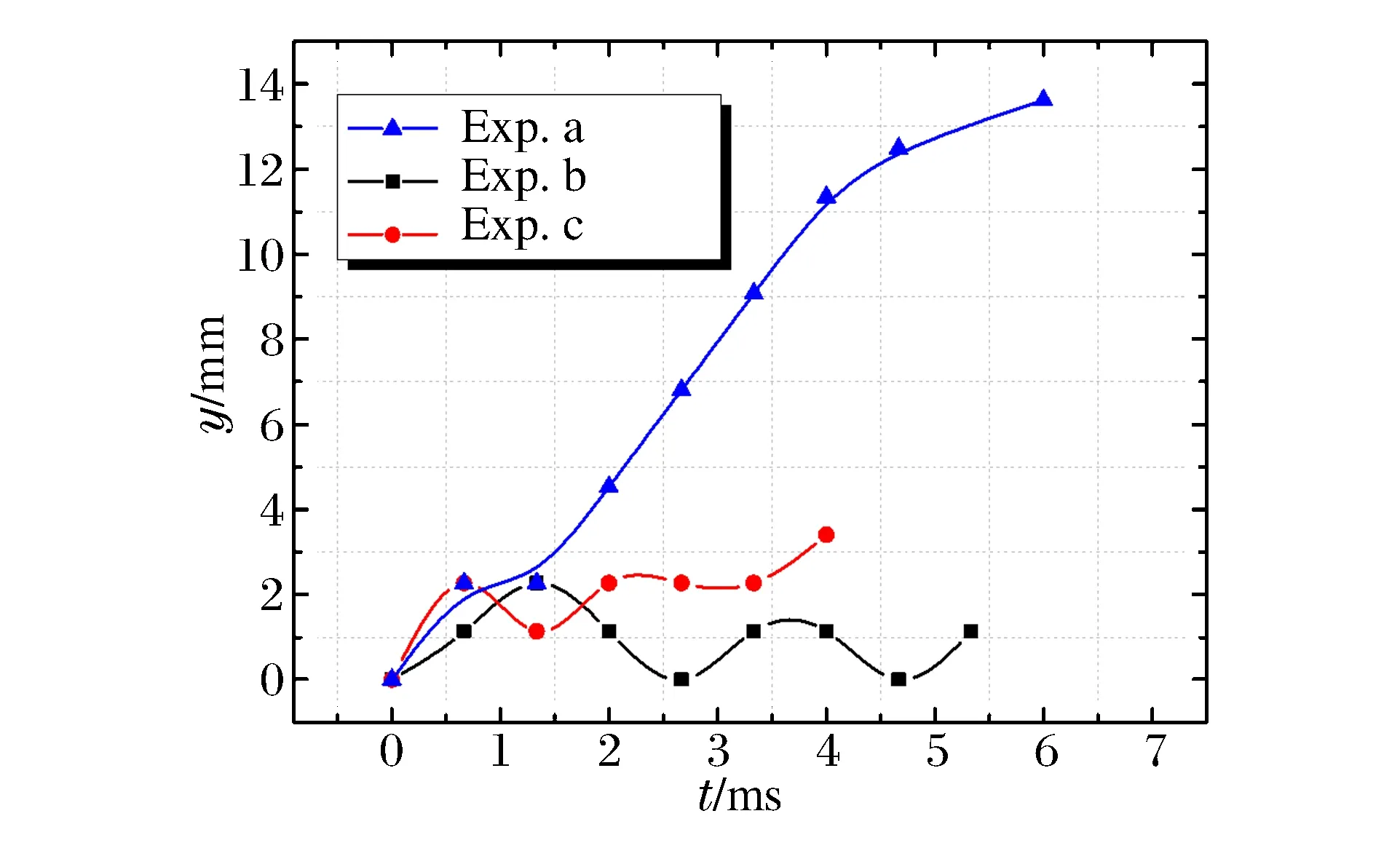
图11 不同初始速度下细长体模型的垂直位移变化Fig.11 Slender body trajectories in y direction vs. time with different initial velocities

图12 夹角示意图Fig.12 Schematic of angles

图13 不同初始速度下细长体空泡轴线与x轴夹角变化Fig.13 Angle α vs. time with different initial velocities
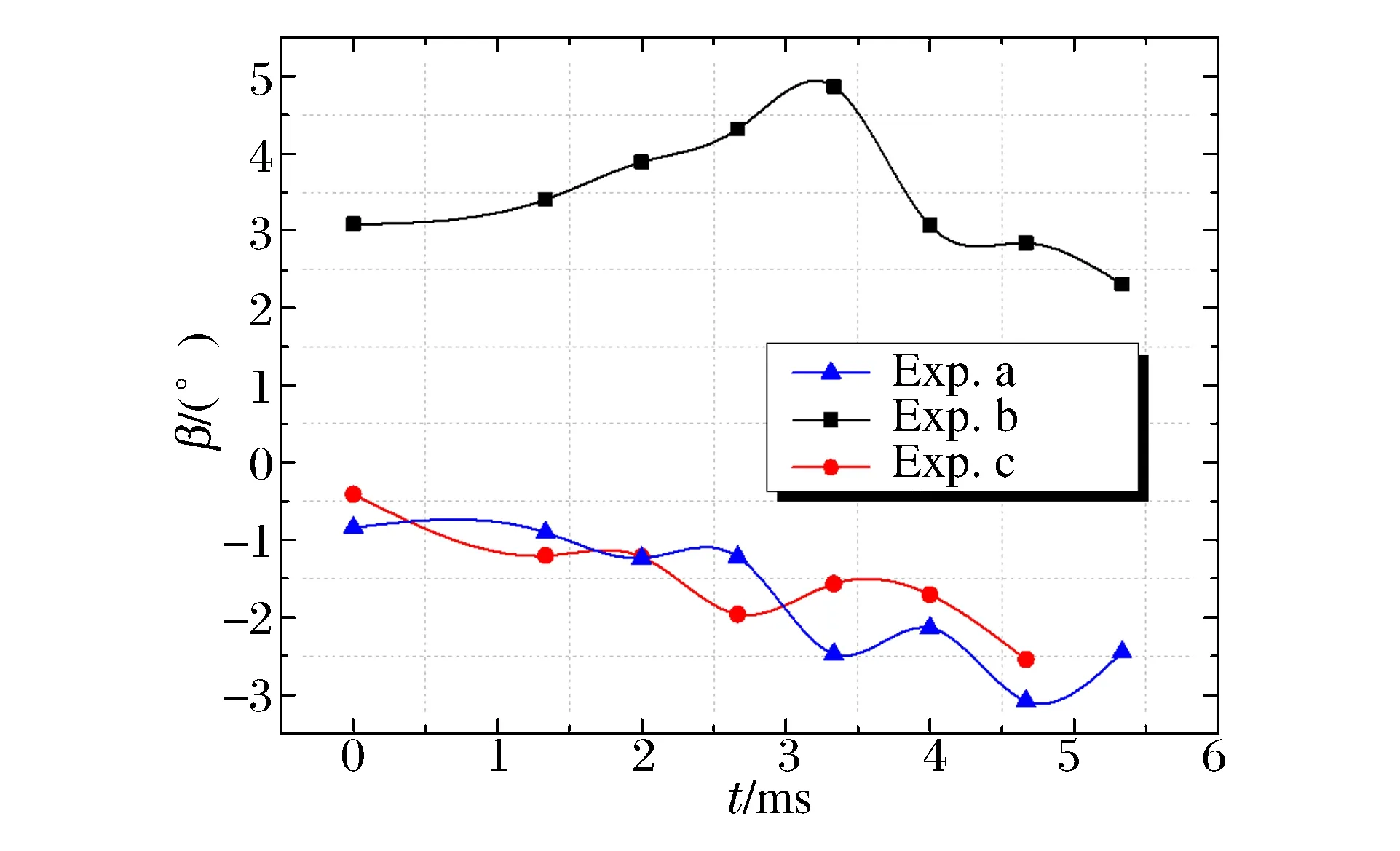
图14 不同初始速度下细长体模型轴线与x轴线夹角变化Fig.14 Angle β vs. time with different initial velocities
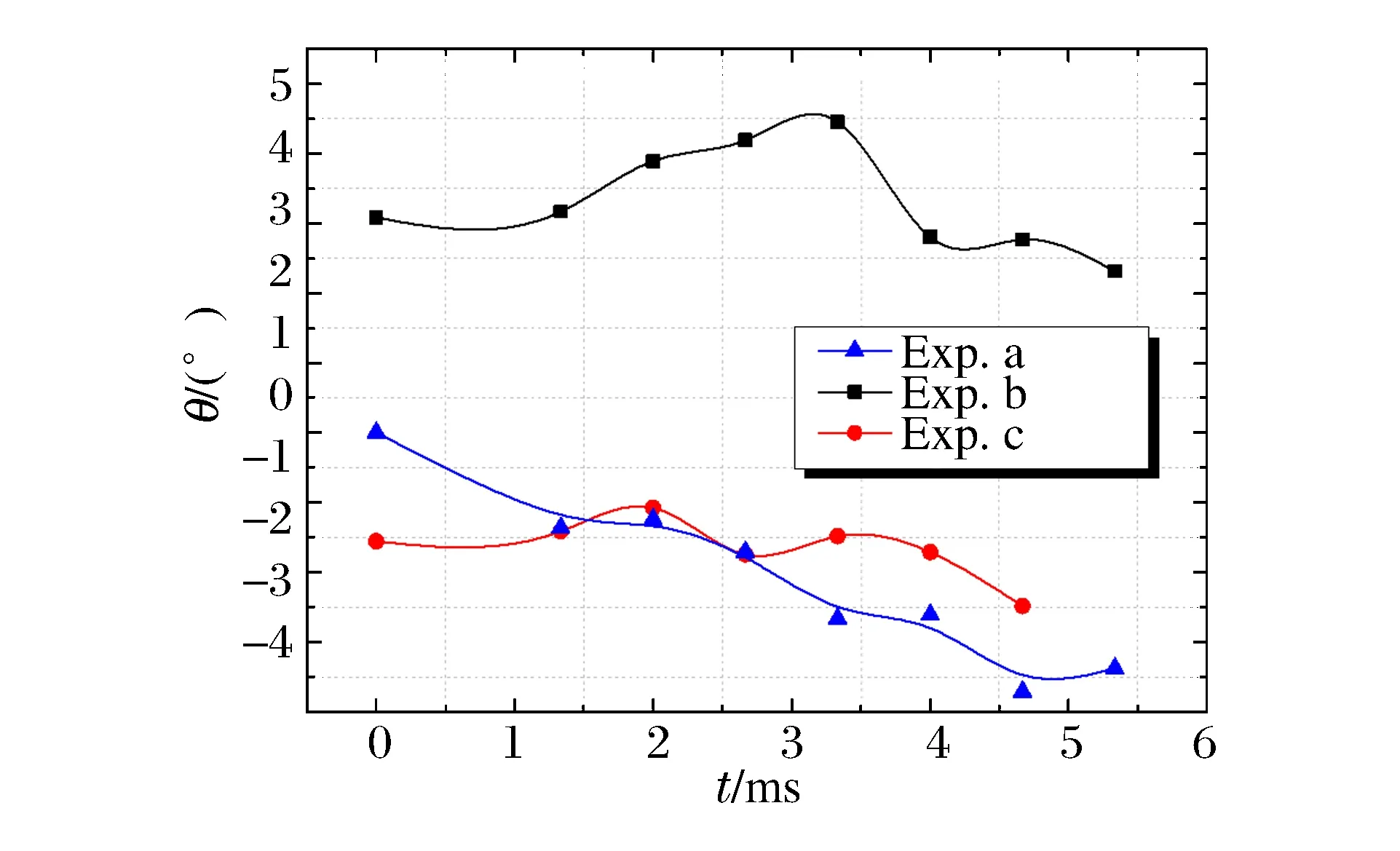
图15 不同初始速度下细长体轴线与空泡轴线夹角变化Fig.15 Angle θ vs. time with different initial velocities
记空泡轴线与x轴夹角为α,细长体轴线与x轴夹角为β,细长体轴线与空泡轴线夹角为θ,如图12所示。不同初始速度下细长体模型的空泡轴线与x轴夹角变化、细长体模型与x轴夹角变化及空泡轴线与细长体模型的夹角变化分别见图13~15。对比分析图13~15,虽然实验a、b、c三组实验的细长体模型的初始速度差异较大,但三组实验中空泡轴线与x轴的夹角α都较小(小于1°),即空泡转动幅度较小。图13中,三组实验由于其初始扰动角速度不同,使得细长体入水后在初始入水空泡内的沾湿面积不同,进而导致细长体的附加质量和转动惯量不同,因此三组实验的扰动频率不同。由于速度较高,三组实验中的空泡摆动幅度较小,空泡轴线与x轴近似平行,因此细长体模型与空泡轴线的夹角变化和细长体模型与x轴的夹角变化趋势差异较小,即图14~15中的β和θ的变化趋势差异较小。图13~14中实验b与实验a、c的结果差异主要由二者的细长体模型的初始扰动转角位置不同引起的,实验b中细长体模型的初始扰动转角为正的角度(逆时针转动),而实验a和实验c中细长体模型的初始扰动转角为负的角度(顺时针转动),即实验b中的细长体模型的尾部首先与空泡的上壁面碰撞,然后反弹回空泡内并与下壁面碰撞;而实验a和实验c中的细长体模型的尾部则刚好相反,首先与空泡的下壁面碰撞,然后反弹回空泡内并与空泡上壁面碰撞;在图13和图14中,实验b中细长体模型的初始扰动角度为3°,而实验a和c中细长体模型的初始扰动角度分别约为-1°和-0.4°,实验a中细长体模型首先与空泡上壁面撞击,在t=3 ms左右,在向下的撞击力和重力作用下细长体模型的转角开始变小,而实验a、c中细长体模型与空泡下壁面撞击后,由于尾拍反力作用较弱,细长体尾部在重力作用下几乎紧贴空泡下壁面滑行,因此其转角为负值并逐渐增大。
3 结 论
通过开展钢质细长体模型水下运动空泡特性与弹道特性实验研究,得到以下结论。
(1)细长体模型在水下高速运动时(速度大于某一临界速度)产生超空泡,模型包裹于空泡内,仅头部与水接触;受初始扰动的影响,模型在空泡内向前运动的同时伴随绕头部的转动,使得模型尾部与空泡壁面发生交替碰撞,即尾拍运动;尾拍运动是保持模型稳定运动的一种方式;尾拍运动中模型与空泡壁面的碰撞使空泡壁面发生凸起。
(2)空泡尾部由于强烈的回射流产生高压区,使得空泡内的水蒸汽在空泡尾部出现凝结现象,表现为空泡尾部透明度和光滑度较差;聚集在空泡尾部高压区的汽水混合物脱离空泡尾部后形成交替脱落的漩涡并消失在流场下游区域;随着模型运动速度的衰减,空泡尾部脱落的漩涡数量逐渐减少,脱落漩涡的震荡程度也减弱。
(3)不同初始速度下模型的速度衰减速率不同;尾拍运动中初始扰动角度的不同,使细长体模型与空泡轴线的夹角变化不同,即细长体模型的初始扰动角速度对弹道特性有一定影响。
[1] Savchenko Y N. Control of supercavitation flow and statbility of supercavitating motion of bodies[C]∥VKI Special Course on Supercavitating Flows. Brussels, 2001:313-341.
[2] May A. Water entry and the cavity-running behavior of missiles[R]. Maryland: Naval Sea Systems Command Hydroballistics Advisory Committee, 1975.
[3] Garabedian P R. Calculation of axially symmetric cavities and jets[J]. Pacific Journal of Mathematics, 1955,6(4):611-684.
[4] Rand R, Pratap R, Ramani D, et al. Impact dynamics of a supercavitating underwater projectile[C]∥ASME Proceedings of DETC California, 1997:1-11.
[5] Kulkarni S S, Pratap R. Studies on thedynamics of a supercavitating projectile[J]. Applied Mathematical Modelling, 2000,24(2):113-129.
[6] Vasin A D. Calculation of axisymmetric cavities downstream of a disk in subsonic compressible fluid flow[J]. Fluid Dynamics, 1996,31(2):240-248.
[7] May A, Woodhull J C. Drag coefficients of steel spheres entering water vertically[J]. Journal of Applied Physics, 1948,19(12):1109-1121.
[8] Ruzzene M, Soranna F. Impact dynamics of elastic stiffened supercavitating underwater vehicles[J]. Journal of Vibration and Control, 2004,10(2):243-267.
[9] 何春涛,王聪,何乾坤,等.圆柱体低速入水空泡试验研究[J].物理学报,2012,61(13):134701. He Chuntao, Wang Cong, He Qiankun, Qiu Yang, et al. Low speed water-entry of cylindrical projectile[J]. Acta Physica Sinica, 2012 61(13)134701.
[10] 熊天红,易文俊.高速射弹超空泡减阻试验研究与数值模拟分析[J].工程力学,2009,26(8):174-178. Xiong Tianhong, Yi Wenjun. Experimental research and numerical simulation of supercavity drag reduction of a high speed projectile[J]. Engineering Mechanics, 2009,26(8):174-178.
[11] 杨传武,刘刚,王安稳.超空泡体结构响应问题的有限元分析[J].海军工程大学学报,2008,20(2):101-104. Yang Chuanwu, Liu Gang, Wang Anwen. FEM analysis of structural response of supercavitating bodies[J]. Journal of Naval University of Engineering, 2008,20(2):101-104.
[12] 张志宏,孟庆昌,顾建农,等.水下亚声速细长锥型射弹超空泡形态的计算方法[J].爆炸与冲击,2010,30(3):254-261. Zhang Zhihong, Meng Qingchang, Gu Jiannong, et al. A calculation method for supercavity profile about a slender cone-shaped projectile traveling in water at subsonic speed[J]. Explosion and Shock Waves, 2010,30(3):254-261.
[13] Hrubes J D. High-speed imaging of supercavitating underwater projectiles[J]. Experiments in Fluids, 2001,30(1):57-64.
[14] Fabien P, Jacques M, Richard S, et al. Diffuse interface model for high speed cavitating underwater systems[J]. International Journal of Multiphase Flow, 2009,35(8):747-759.
[15] Savchenko Y N, Vlasenko Y D, Semenenko V N. Experimental studies of high-speed cavitated flows[J]. International Journal of Fluid Mechanics Research, 1999,26(3):365-374
(责任编辑 王小飞)
Experiment of cavitation and ballistic characteristics of slender body underwater movement
Zhao Chenggong, Wang Cong, Wei Yingjie, Zhang Xiaoshi
(SchoolofAstronautics,HarbinInstituteofTechnology,Harbin150001,Heilongjiang,China)
Experimental studies of the slender body’s underwater movement were conducted using high-speed camera. Based on the results from the experiment, we examined the characteristics of the cavitation and ballistic of the slender body moving underwater. The experimental results show that the slender body’s underwater movement is accompanied with a supercavity, and the slender body’s movement and rotation occur in the supercavity except for the contact between the slender body’s head and the supercavity wall and the supercavity wall is transparent and smooth except for its tail. The impact between the tail of the slender body and the supercavity wall results from the slender body’s rotation in the supercavity, called the tail slap, which serves to stabilize the slender body’s movement in the supercavity as a result form the initial perturbation of the flow field. The cavity evolution, closure and shedding were discussed in detail. Series of different flow mechanisms and the relationship between ballistic characteristics and cavity morphology were also analyzed with different initial velocities. The slender body has different accelerations with different initial velocities and the effect of the drag reduction using super cavitation is influenced by factors such as cavity length, diameter and aspect ratio, etc. The initial perturbation angle affects the variation of the angle between the slender body and the cavity axis.
multiphase flow; vaporization; turbulent flow; slender body; cavity
10.11883/1001-1455(2017)03-0439-08
2015-11-13;
2016-02-27
中央高校基本科研业务费专项基金项目(HIT.NSRIF.201159)
赵成功(1986- ),男,博士研究生,zcghit@163.com。
O351.2 国标学科代码: 13025
A