基于MSP430F149的电磁控制运动装置设计
2017-05-30刘德玉


摘 要:本文介绍了一种基于单片机MSP430F149的电磁控制运动装置,该系统采用MSP430F149为控制核心,以19组条形电磁组成电磁牵引轨道,通过控制达林顿管和续流二极管来控制条形磁铁的磁化和消磁过程,从而实现对摆杆转动角度、响应时间的精确控制;摆杆振幅控制准确、频率易调节、工作稳定可靠、经济实用,此外还配备了语音报读和声光报警。
关键词:MSP430F149;电磁;摆杆
中图分类号:TN602-34 文献标识码:A
随着工业控制的不断进步,电磁直線运动控制以结构简单、响应速度快、精度高等特点,越来越受工业控制的重视,如直线电机伺服控制系统、高端数控机床、电磁弹射等场合,起着重要的作用[ 1 ]。本文设计了一套电磁运动控制系统,实现电磁运控的响应速度控制,幅度控制等。如图1所示,此装置由支架、摆杆支撑轴、运动摆杆、磁铁、电磁控制装置组成,利用电磁控制装置控制磁力的变化,完成运动摆杆的角度、幅度、频率控制。其控制指标是:摆杆运动摆角范围为10°~45°,摆动步进角度为5°,摆动幅度绝对误差<=3°,响应时间为10S;摆动周期范围在0.5S~2S,周期误差<=0.1S;具有声光报警功能[ 2 ]。
1 摆杆受力理论分析
根据电磁运动控制装置示意图和控制指标要求分析,当摆杆静止时, 摆杆受到三个力的作用,一个是重力G,一个是电磁铁L和拉力F,其受力分析如图2(a)所示[ 3 ]。
绳子的拉力F=重力G+磁场对摆杆的拉力L
当摆杆在任意角度上时,摆杆受到重力G、磁块对摆杆的拉力L和绳子对摆杆的拉力F。此时磁块D对摆杆的作用力方向始终于与拉力F方向相反[ 4 ]。 摆杆在摆动过程中的某一时刻的加速度为a[ 5 ],则
2 系统总体方案
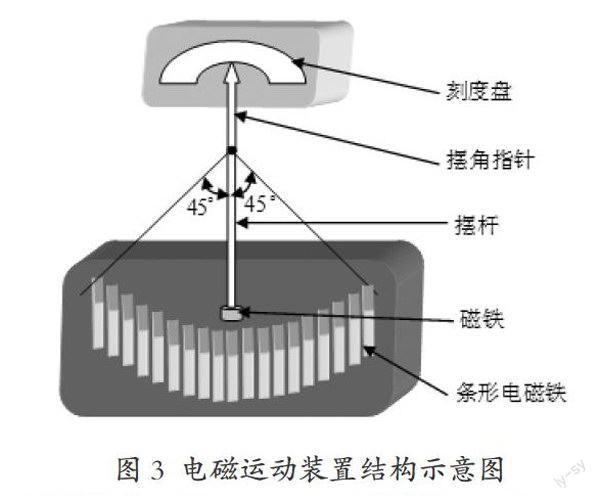
根据受力分析,利用电磁铁中的同性相斥、异性相吸的特性,模拟电磁牵引方法,借助步进电机的结构和运动原理,在距离摆杆磁铁下方约0.8厘米处,设计一条圆弧牵引轨道,在圆弧牵引轨道上每5°一个等份合理放置19个条形电磁铁。
如图3电磁运动装置结构示意图。每个磁铁间的步距角度为5°,通电方式细化步距角为2.5°,条形电磁铁在其驱动电路的驱动下,依次产生磁场,由于摆杆端部为磁性材料,根据磁场“异性相吸”的原理,依靠磁场吸力牵引摆杆摆动。此方法可以控制摆杆角度精确,控制系统相对简单,大大减少软件设计难度[ 6 ]。
如图4系统模块框图所示。此电磁控制装置,采用MSP430F149作为系统控制器。分为电磁驱动模块、振幅检测模块、声光报警模块、键盘模块、显示模块和电源模块组成[ 7 ]。
3 硬件设计
3.1 条形电磁设计
作用在被磁化的衔铁上的电磁吸力,其大小与磁力线穿过磁极的总面积及气隙中磁感应强度的平方成正比。如果磁感应强度在磁极表面上是均匀的,则计算电磁吸力的基本公式为[ 8 ]:
3.2 电磁驱动模块电路
如图6所示,当接口1输出低电平时,三极管8050截止,TIP142关闭,电磁铁不得电;并联续流二极管消除剩磁,避免摆杆运行出现“失步”现象;当接口1输出高电平时,三极管8050导通驱动TIP142导通,电磁铁得电,产生磁场,作用于摆杆端部的磁铁,从而平稳摆动[ 10 ]。电磁驱动电路如图6所示。
4 系统软件设计
4.1 系统主程序流程图
主程序开始工作在一个等待设定状态,当有键按下时系统根据按键模式工作。系统根据设定的模式工作,摆杆振幅角度采样采用定时器中断进行,主程序流程图如图7所示。开机后,系统采集并显示当前摆杆角度,当有按键进行功能选择时,分别进入“基本功能”、“发挥部分”、“其它”3个不同的子程序。
4.2 摆角、周期控制子程序流程图
本系统的摆杆振幅角度和周期控制为设计主要内容,其控制流程图如图8。
5 系统测试
此系统采用实测的方法,测试分为两大步骤,第一步骤,固定周期,改变摆幅角度。利用量角器进行准确测量。第二步骤,固定几个摆幅角度,改变摆动周期。利用量角器进行准确测量。其摆动结果如表1,表2所示,从测量实测结果看,误差在1到2度,达到控制要求。
预置周期测试,显示数据如表2所示。
6 结论
本文采用MSP430F149单片机为控制核心,实现功能要求的全部功能,并达到全部指标。此装置在全国大学生电子设计竞赛中,获高职组全国一等奖第一名,获“瑞萨杯”荣誉。
参考文献:
[1] 马伟明,肖飞,聂世雄.电磁发射系统中电力电子技术的应用与发展[J].电工技术学报,2016,31(19):1-10.
[2] 邢华,范亚琳,王文宁,et al.关于电磁场对单摆运动控制的研究[J].承德石油高等专科学校学报,2014,16(3):24-7.
[3] 余友好,朱春涛,张丹丹,et al.直线型电磁驱动装置的设计分析[J].2016.
[4] 施昕昕.基于电磁直线执行器的运动控制技术研究[D].南京理工大学,2012.
[5] 刘梦珂,张辉,范宝春,et al.电磁控制两自由度涡生振荡的机理研究[J].物理学报,2016,65(24).
[6] 张凯.基于电磁模块的物料运输系统设计[D].华中科技大学,2015.
[7] 胡仁杰,堵国樑,黄慧春.全国大学生电子设计竞赛优秀作品设计报告选编[M].东南大学出版社,2016.
[8] 侯文杰.电磁脉冲渐进成形数控系统研究[D].华中科技大学,2009.
[9] 覃展斌.具有运动控制功能的电液比例阀控制器研究[D].浙江大学,2016.
[10] 高职高专组.第十一届全国大学生电子设计竞赛获奖作品选编.2013.[M].北京理工大学出版社,2015.
作者简介:
刘德玉(1982-),吉林大学研究生,现就职于湖南工业职业技术学院电气工程系,讲师,研究方向:自动控制。
