电力传动中的扭振及振动抑制
2017-05-24杨影余衍谱黄锐韩冰
杨影,余衍谱,黄锐,韩冰
(上海大学机电工程与自动化学院,上海 200444)
电力传动中的扭振及振动抑制
杨影,余衍谱,黄锐,韩冰
(上海大学机电工程与自动化学院,上海 200444)
传动系统中的机械扭振会引起控制系统控制的振荡,从而加大机械传动装置的磨损,成为制约机械动态性能提高的主要原因.通过并联谐振电路理论分析机械扭振发生的机理和扭振时的能量传递过程,利用品质因数评估扭振的危害程度,定量计算引发扭振的谐波转矩含量.指出在大惯量负载时,扭振危害程度更大,较小的转矩谐波即可激发几十倍的扭矩.最后,引入扭矩反馈抑制扭振,给出了扭矩观测器的有限带宽设计方法,指出基于扭矩观测器的反馈控制能增大谐振频率,并对关键的系统参数进行了敏感性分析.分析和仿真结果表明,该方法可以很好地抑制谐振.
扭振;谐振电路;扭矩观测器;谐振频率;参数敏感性
高性能的伺服系统已广泛应用于运动控制中,如医疗影像设备、机器人、精密机床等.一般情况下伺服驱动系统中常使用传动轴、变速器、联轴器等传动部件连接电机和负载,而实际上传动部件具有一定的弹性,并非理想刚体.当伺服系统带宽覆盖执行机构固有机械谐振频率时,扭振频率信号得不到有效衰减,就会在系统中引发持续的机械谐振——扭振.机械振动会产生噪声污染,加大传动装置的磨损,影响其使用寿命,严重时会损坏弹性传动部件,甚者会使控制系统中的控制量发生振荡,影响闭环控制的稳定性[1-2].
为提高系统动态特性,在转速闭环中采用高增益控制器,但扭振限制了控制器增益的增加,成为制约动态性能提高的主要因素[3].为简化讨论,本工作针对简化的两惯量系统进行分析.因扭振具有破坏性,较难进行实验,故有必要进行仿真验证.目前扭振抑制的方法主要有4种:①基于电机和负载变量直接测量的控制策略,该方法根据振荡信号微调变频器输出来抑制扭振,但常因引入弹性连接而降低系统稳定裕度,且进一步降低低速时的转速环带宽,此外该方法还提高了系统成本,因此仅限个别场合使用[4-5];②机械振动多数是在一定波段振动,去掉振动波段即可抑制振动,因此可在速度控制器中引入陷波滤波器滤除共振频率段,但由于该方法依靠前向通道的幅频特性衰减扭振,衰减时间较长,故动态性能不高[6-7];③基于变频器优化控制,通过控制缆线的耦合布置及直流母线电压的波动抑制、变频器中脉宽调制(pulse width moduolation,PWM)更新率、死区时间补偿来抑制扭振,从而抑制开环大功率变频器引起的机械振动[8-9];④基于观测器的反馈控制,通过微调电磁转矩以快速衰减扭振,该方法是目前学术界研究的热点、难点,因为只在转速环带宽较低时才有足够的时间完成控制算法,故使用场合有限[10-11].本工作借助并联谐振理论分析了扭振产生时的能量流动过程,并对模型的扭振进行特性分析,设计引入一种观测速度可以实现最优值的有效带宽观测器.理论分析和仿真结果表明,基于观测器反馈控制的扭振抑制效果较好.
1 系统模型
一般用两惯量结构模型作为系统模型,如图1所示,弹性连接的两惯量系统模块结构如图2所示,其中JM0为电机及连接部件的附加惯量,JL为负载惯量,Ds为阻尼系数,DM, DL分别为电机、负载阻尼系数,Ks为刚度系数,θs为扭转角,Ts为扭矩,TM为电机端电磁转矩,TL为负载转矩,ωM为电机转速,ωL为负载转速,s为拉氏变换后的微分算子.
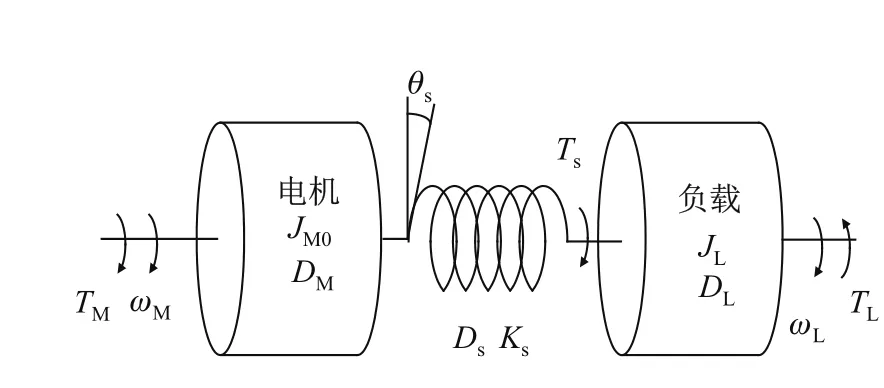
图1 两惯量结构模型Fig.1 2-mass structure model
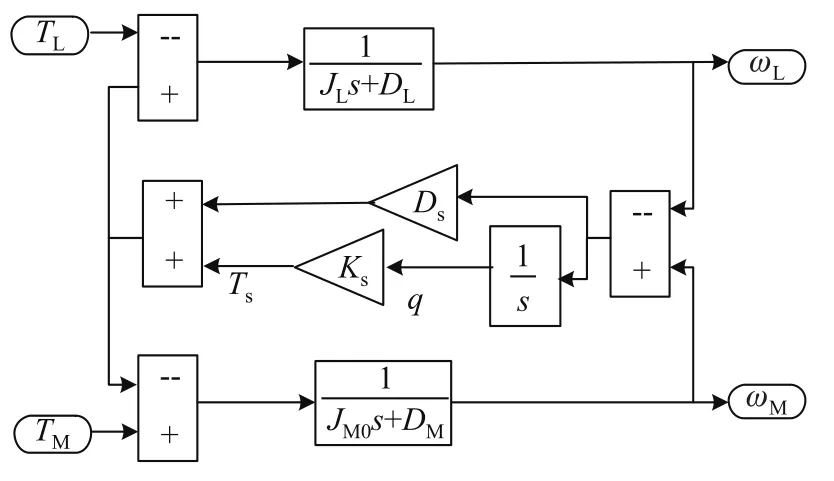
图2 两惯量系统结构模块Fig.2 2-mass system structure module
实际上机械中的阻尼系数DM,DL很小,常可忽略,因此由图2可得到ωM到TM的传递函数:

式中,抗共振频率wa和共振频率wr分别为

其中R0=JL/JM0为系统的惯量比.
由传递函数可以求出扭振频率,并进行频域特性分析.但是扭振发生时是否需要额外的能量?内部的能量转换关系是怎样的?从系统的角度看弹性连接是扭振发生的内因,那么扭振发生的外因如何分析?仅利用传递函数难以解释机械扭振中的这些问题.由于电路中也会发生振荡,因此考虑借用电路振荡理论分析机械扭振问题.
2 扭振机理
2.1 系统等效电路和能量流动

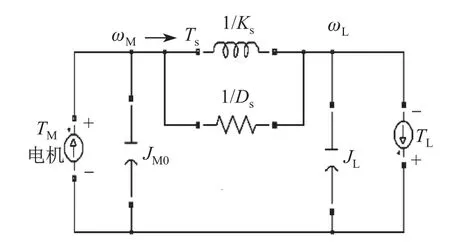
图3 两惯量系统的等效变换电路Fig.3 Equivalent circuit of 2-mass system
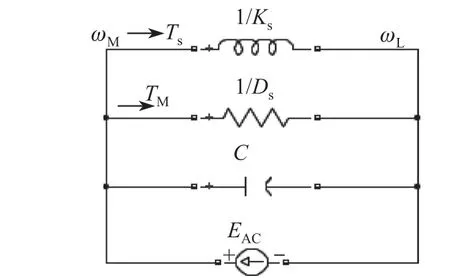
图4 两惯量系统二次变换后的等效电路Fig.4 Transformation circuit of equivalent circuit of 2-mass system
2.2 系统性能
为了进一步评估扭振的危害程度和定量计算引发扭振的谐波转矩含量,需要计算并联谐振电路的品质因数Q,

此时,电机端转动惯量JM0=49.07 kg·m2,负载端转动惯量JL=285.57 kg·m2,传动轴的弹性系数Ks=9.605×105N·m·s/rad,传动阻尼系数Ds=127.35 N·m·s/rad.
由式(4)可求得Q=49.8,谐振时Ts是EAC的49.8倍.风机类负载中TL与转速平方成正比,若不考虑负载转矩中的扭振频率分量,可求得

考虑扭振频率的电磁转矩分量有效值为200 N·m,则扭振频率消耗的能量W1为228 W, 而W0仅为114 W,因此Q值越大,电机轴上的弹性势能和转动动能之和越大.这说明电机输出电磁转矩中含有2.35%的扭振频率转矩谐波分量,便可激发100%的轴转矩振荡.因此与367 kW的额定功率相比,维持这种扭振消耗的有功功率和出现扭振时需要的无功功率是很小的,不易察觉.
2.3 行为特征
图3所示的等效变换电路中,激励转矩TM到扭矩Ts的传递函数近似表示为

引入式(4)中的电机参数,谐振时转矩放大倍数As(扭矩Ts与频率f0的电机激励转矩TM幅值之比)为

在频率wr处,传递函数的相频和幅频特性剧烈变化,系统发生振荡.传递函数(考虑Ds)的伯德图如图5所示.
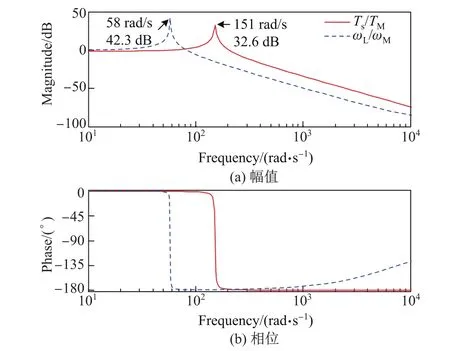
图5 传递函数的伯德图Fig.5 Bode diagram of the transfer function
由图5可以看出:在抗共振频率点wa处之前,电机转速和负载转速幅值基本相同,相位相同;在抗共振频率点wa附近,负载转速幅值增益突增42.3 dB,相位从同相突变到反相;在抗共振频率点wa之后较大的频率范围内,负载转速幅值在衰减(衰减斜率接近−40 dB/dec),相位与电机转速保持反相状态.由扭矩到Ts到电磁转矩TM的传递关系可以看出:在系统共振频率点wr之前,扭矩幅值与电磁转矩幅值基本相同,相位相同;在共振频率点wr附近,扭矩幅值增益突增,与电磁转矩相位从同相突变到反相.
3 扭振抑制
为了减小扭振,引入反映扭振状态的扭矩构成闭环控制.闭环控制系统主要由两惯量模型、扰动观测器模型和速度控制器组成.
3.1 引入扭矩观测器
图6为基于扭矩观测器的闭环控制系统.当Tq=0时,系统为基于实时状态观测的理想闭环控制.通过将估算扭矩的K−1倍负反馈到电磁转矩给定处,就可以将电机惯量虚拟改变为任意值,从而达到抑制扭振的目的.
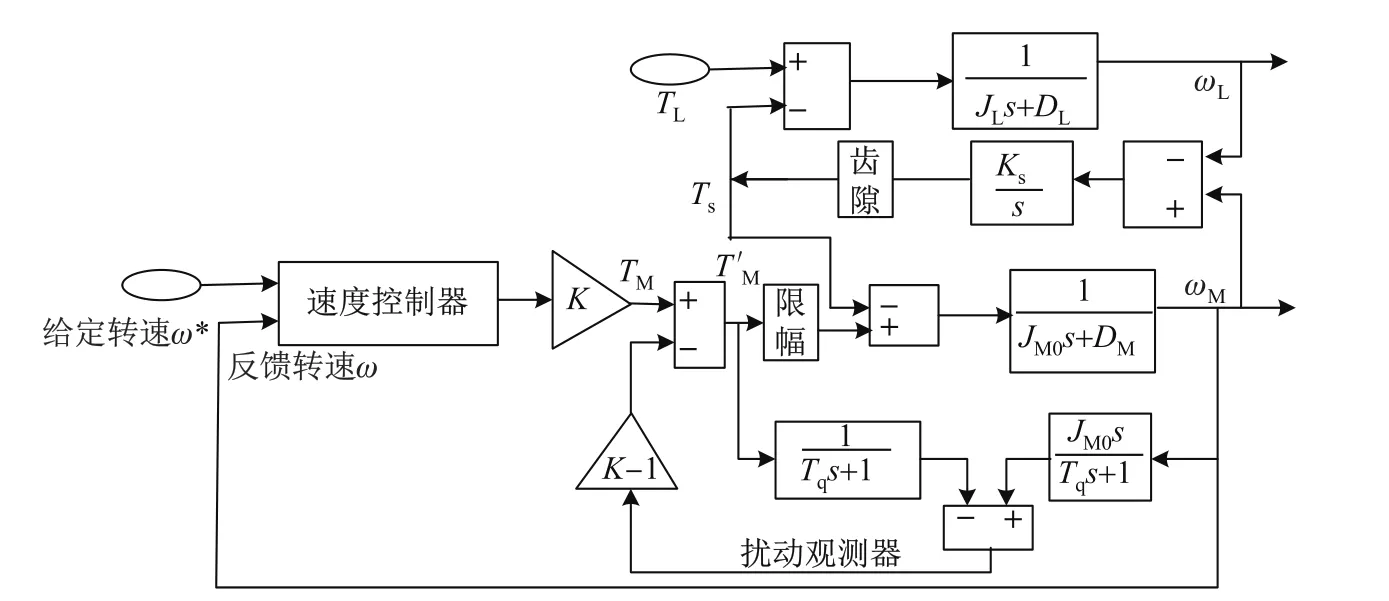
图6 基于扭矩观测器的闭环控制系统Fig.6 Closed-loop control system based on torque observer

3.2 观测器带宽参数设计

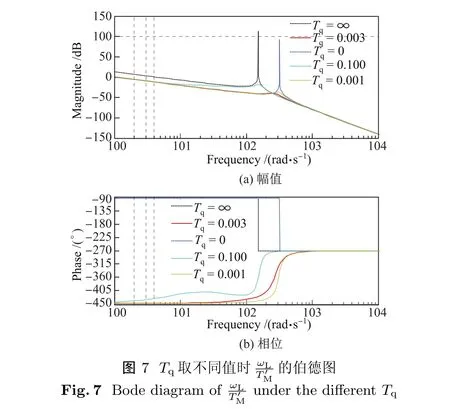
由图7可以看出,幅值在交点w0处达到极大值,此时振动抑制效果最佳.另外,可求得扰动观测器的最优估测速度[12]

3.3 设计参数K
因为R=KR0,wa为R0的函数,所以当给定R0时,由式(16)和(17)可知w0处峰值和最优估测速度Tq都只是关于K的函数,

图8为w0处传递函数峰值与K的关系.由图8可以看出,在给定R0的情况下,当K增大时,w0处传递函数的峰值减小,有利于降低振动的幅度.图9为扰动观测器最优观测速度wq=1/Tq与R0的关系.由图9可以看出,当K增大时wq增大,即K增大时需要更快地估测速度,但在实现上较为困难,


图8 w0处传递函数峰值与K的关系Fig.8 Relationships between the peak of transfer function at the point w0and K
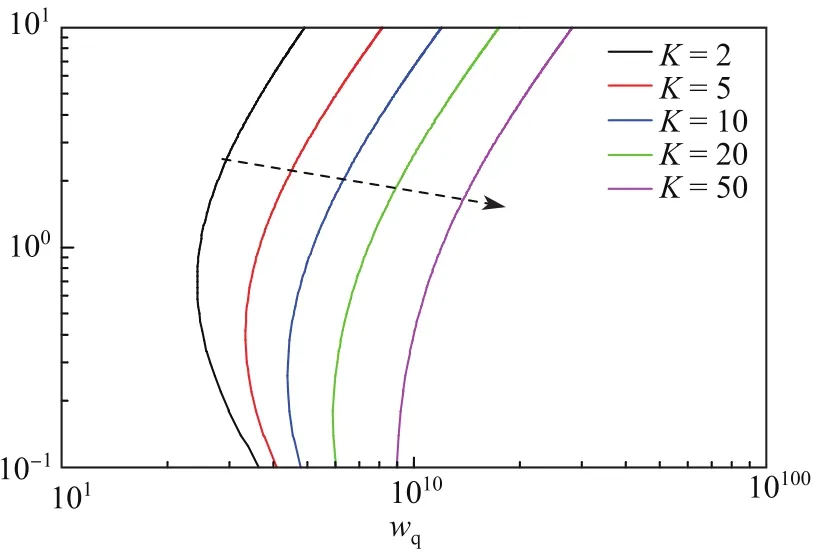
图9 最优观测速度wq与R0的关系Fig.9 Relationships between the optimal observation velocity wqand R0
由图8和9可以看出,选择K=5~10,可在保持wq值较小的情况下,使得峰值也相对较小.对于较小的K,wq也较小,从而使得观测器易于实现.参数K,Tq和R0之间存在相互关系,可知当给定Tq和R0的情况下可以得到最优K值,也可以由评估峰值来确定最优K值,但无法给出K的明确表达式.在大部分工业应用中,Tq最小值由实际中的实验因素如采样周期、噪声抑制能力等决定,并且受惯量比R0,比例-积分调节器参数以及齿槽间隙影响,因此提前确定Tq最小值是比较困难的,应先确定K值,再确定Tq值.
3.4 参数敏感性分析

因为基于扭矩观测器的扭振抑制效果只与K值有关,所以当K值确定后,运行过程中电动机的自身惯量JM0一般不会发生变化,而只取决于轴连接材质的刚度系数Ks也不会发生变化.在某些特殊情况下,如机器人手臂伸缩取物时,负载惯量JL会发生变化,因此有必要讨论扭矩观测器对负载惯量JL变化时的敏感性.

4 仿真分析
4.1 步骤设计
仿真条件如下:
(1)JM0=JL=0.000 103,Ks=39,R0=1,Tq=6.294 1×10−4,忽略DM和DL;
(2)当t=0 s,速度给定n∗=600 rad/min和t=0.3 s,速度给定n∗=1 200 rad/min时,分别观测指令的响应特性;
(3)当t=0.1 s,T∗L=0.5时,观测扰动响应特性.
添加理想扰动观测器后的ωL/T'M与原始两惯量系统的ωL/TM相比(见图10),系统的共振频率增大.由ωL/T'M的幅频特性可以看出,系统共振频率处的幅值下降较大,振动得到有效抑制.
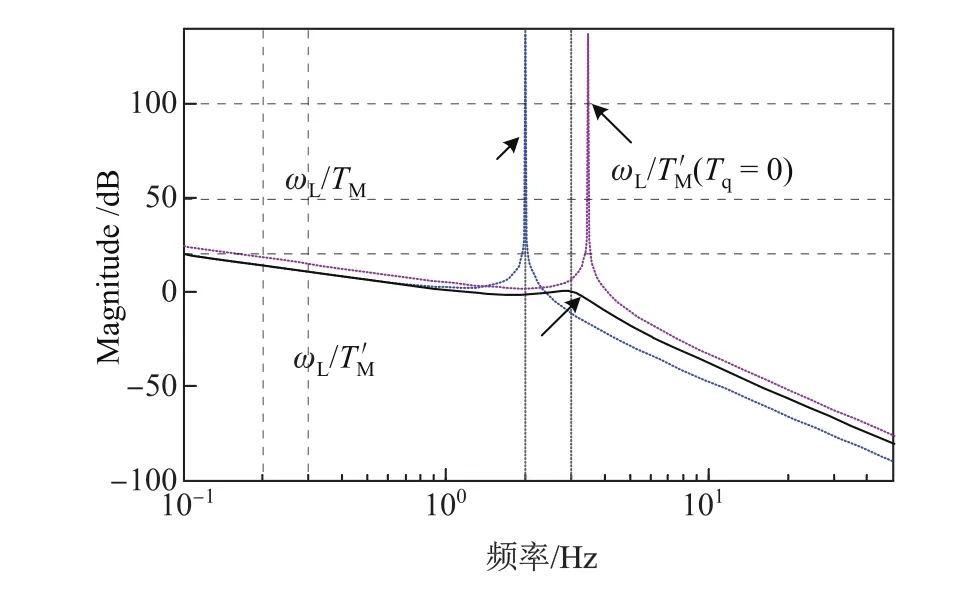
图10 扰动观测器添加前后系统的幅频特性Fig.10 Magnitude-frequency characteristics of the system with and without the disturbance observer
图11为矢量控制id=0时的仿真结果,其中K=1时相当于没有加扭矩观测器反馈控制.由图11可以看出,加扭矩观测器反馈K=5启动情况下,负载转速ωL的速度超调比不加扭振抑制时明显减小,动态响应速度一致.扭矩Ts具有以下特点:开始启动时,常规启动转矩为2.5 N·m,且有较明显的反向扭矩;加扭矩观测器反馈K=5时,启动转矩为1.5 N·m,反向扭矩较小.另外,在恒负载下0.3 s突加转速时,负载转速ωL超调变小,突加的扭矩Ts及扭矩波动都有较明显的减小.
4.2 参数敏感性
电机惯量JM0、刚度系数Ks等系统参数在一般情况下不会发生变化或变化很小.考虑到实际中较不理想的情况,若负载惯量JL在电机运行0.2 s时突变为原来的2倍,则负载转速ωL和扭矩Ts的仿真波形如图12所示.
对比图11和12可以发现:当负载惯量JL突变为原来的2倍时,转速超调变大,但变化不明显;突加转速时引起的扭矩明显增大,最大扭矩为2.75 N·m,比常规控制正常情况下的最大扭矩3 N·m要小.因此基于扭矩观测器的控制方法对一定范围内的负载惯量突变仍有一定的扭振抑制效果,对参数变化敏感性较差.

图11 扭矩观测器下的仿真结果对比Fig.11 Comparisons of simulation results based on torque observer

图12 扭矩观测器下负载惯量JL变化情况下的仿真结果Fig.12 Simulation results of load inertia JLchange based on torque observer
5 结束语
本工作利用并联谐振电路理论分析了机械扭振发生的机理和扭振时的能量传递过程,利用品质因数评估扭振的危害程度,定量计算引发扭振的谐波转矩含量,指出较小的转矩谐波可能激发几十倍的扭矩.通过引入一个有限带宽观测器作闭环控制抑制扭振,给出了扰动观测器的最优观测速度,其中基于扭矩观测器的反馈控制能增大谐振频率,且本方法中的扰动观测器易于实现.另外,通过公式的推导,对关键的系统参数进行了敏感性分析,并利用仿真软件Matlab对系统进行伯德图分析和仿真验证,结果表明本方法对参数变化敏感性较差,可以有效地抑制扭振.
[1]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2006:244-263.
[2]杨明,胡浩,徐殿国.永磁交流伺服系统机械谐振成因及其抑制[J].电机与控制学报,2012,16(1): 79-84.
[3]陈伯时.电力拖动自动控制系统——运动控制系统[M].4版.北京:机械工业出版社,2009:192-199.
[4]蔡昆,许镇琳,张弢,等.电气传动中的扭振现象及其抑制[J].电气自动化,2005,41(5):19-21.
[5]HUNG J Y.Control of industrial robots that have transmission elasticity[J].IEEE Transactions on Industrial Electronics,1991,38(6):421-427.
[6]GHORBEL F,HUNG J Y,SPONG M W.Adaptive control of flexible-joint manipulators[C]// Proceedings of International Conference on Robotics and Automation.1989:9-13.
[7]KATAOKA H,TUNGPATARATANAWONG S,OHISHI K.Motion control of industrial robot using new notch filtering system for vibration suppression and little phase error[J].IEEE International Conference on Mechatronics,2007,135(34):1-6.
[8]KERKMAN R J,LEGGATE D,SCHLEGEL D W,et al.Effects of parasitics on the control of voltage source inverters[J].IEEE Transactions on Power Electronics,2003,18(1):140-150.
[9]LEGGATE D,KERKMAN R J.Pulse-based dead-time compensator for PWM voltage inverters[J]. IEEE Transactions on Industrial Electronics,1997,44(2):190-199.
[10]UMIDA H.Novel control strategies of torsional vibration system:a dully tuned disturbance observer[C]//IEEE-IAS Annual Meeting Conference Recorder.1994:12-15.
[11]HORI Y.Comparison of torsional vibration controls based on the fast and slow disturbance observers[C]//Proceeding of IPEC.1995:440-446.
[12]HORI Y,SAWADA H,CHUN Y.Slow resonance ration control for vibration suppression and disturbance rejection in torsional system[J].IEEE Transactions on Industrial Electronics,1999, 46(1):162-168.
本文彩色版可登陆本刊网站查询:http://www.journal.shu.edu.cn
Torsional vibration and vibration suppression in power drives
YANG Ying,YU Yanpu,HUANG Rui,HAN Bing
(School of Mechanics Engineering and Automation,Shanghai University,Shanghai 200444,China)
Torsional vibration causes oscillation and increases mechanical transmission wear.It is a main constraint in improving dynamic performance of drive systems.A parallel resonant circuit theory is used to analyze the mechanism and energy transfer process during torsional vibration.With a quality factor for assessing the degree of harm,torsional torque caused by torsional vibration harmonic content is quantitatively calculated,showing that a large inertia load leads to a great degree of torsional vibration damage,and even a small harmonic torque can cause torque of several dozens of times as large.Torque feedback is introduced to inhibit torsional vibration,and a design method of torque observer with limited bandwidth is presented.The torque feedback control based on observer can raise the resonant frequency.A sensitivity analysis is done for some critical system parameters.The analysis and simulation studies show that the proposed method can suppress resonance. Key words:torsional vibration;resonant circuit;torque observer;resonant frequency; parameter sensitivity
TM 341
A
1007-2861(2017)02-0225-10
10.3969/j.issn.1007-2861.2015.03.009
2015-04-01
杨影(1979—),女,副教授,博士,研究方向为高性能伺服控制系统.E-mail:yangying-h@163.com
