低压开关的机构动态仿真分析与优化
2017-05-17查海林
谭 韡 查海林 肖 星
1.上海交通大学机械与动力工程学院,上海,2000302. 西门子(中国)有限公司上海分公司,上海,201108
低压开关的机构动态仿真分析与优化
谭 韡1,2查海林2肖 星2
1.上海交通大学机械与动力工程学院,上海,2000302. 西门子(中国)有限公司上海分公司,上海,201108
低压开关的动态过程分析对于其优化设计非常重要,机构系统中碰撞接触导致的弹跳会引起电弧烧蚀,直接影响开关的电气寿命。采用虚拟样机技术对开关的闭合过程进行动态仿真,获得机构的动态过程及各接触位置的接触状态变化,并通过与开关闭合过程的弹跳时间测试结果进行对比,以及与电气寿命试验后样品的烧蚀位置进行对比,证明了仿真模型的正确性。最后通过仿真模型的正交试验研究了相关设计参数对开关弹跳的影响,分析得到机构的优化方案并进行了试验,试验结果验证了所提出方案的有效性。
低压开关;动态仿真分析;开关弹跳;正交试验
0 引言
虚拟样机技术已成为开发新型低压电器的关键技术[1]。机构动态仿真方法可以展现低压开关的实际运动过程以及测量部件的受力情况,解释在不同设计参数下运动状态的改变情况,方便寻找结构优化设计方向。目前低压电器动态仿真的研究主要建立在接触器、断路器等电器产品上,此类产品机构分为3个部分:触头接触系统、电磁驱动系统及这两个部分的互连机构。对触头部分的关注体现在电接触的电弧分析方面[2-3];对电磁系统的研究大部分是数值分析、设计仿真等[4-5];对联动机构主要通过机械系统的动态过程分析进行仿真[6-9]。本文研究的低压开关装置不涉及电磁系统,仅触头机构的电接触和电弧原理与前述产品相同,驱动及联动机构实现方式较多,完全不同于接触器、断路器等产品,所以上述研究方法和仿真模型不能直接适用于开关装置。近年来,涉及同类型低压开关装置的动态特性仿真的文献[10-12]主要研究了结构参数对触头接触压力的影响,虽然发现了触头弹跳现象,但并未在机构优化过程中考虑弹跳问题,脱离了实际产品研发测试过程中需要解决的最终问题,即弹跳引起电弧烧蚀而导致的电气寿命缩短问题。
本文的目的是利用Creo软件的建模及机构动态仿真模块,针对跷板式低压开关的机构系统建立无缝连接的三维实体模型和动态仿真模型,找出机构运动过程中的弹跳位置,以缩短弹跳时间为优化目标,确定优化参数和方案并进行验证。Creo软件提供了参数化建模,对于开关装置能很方便地建立设计图纸,其集成的机构运动仿真分析模块Mechanism可直接在其三维实体模型上设置机构连接、驱动条件和载荷状态,并通过自带求解器完成动力学仿真分析,展现机构的动态过程。
1 开关机构样机模型的建立
跷板式开关机构是最常见的低压开关装置运动方式,如图1 所示。驱动条件来自于人手按压开关按钮,按钮旋转时内部的弹簧通过压头带动动触片绕支轴做跷板运动,动触片的触头最终与静触头闭合,由按钮内部的弹簧力提供两个触头间的接触压力,电路闭合,电流通过,实现通断功能。
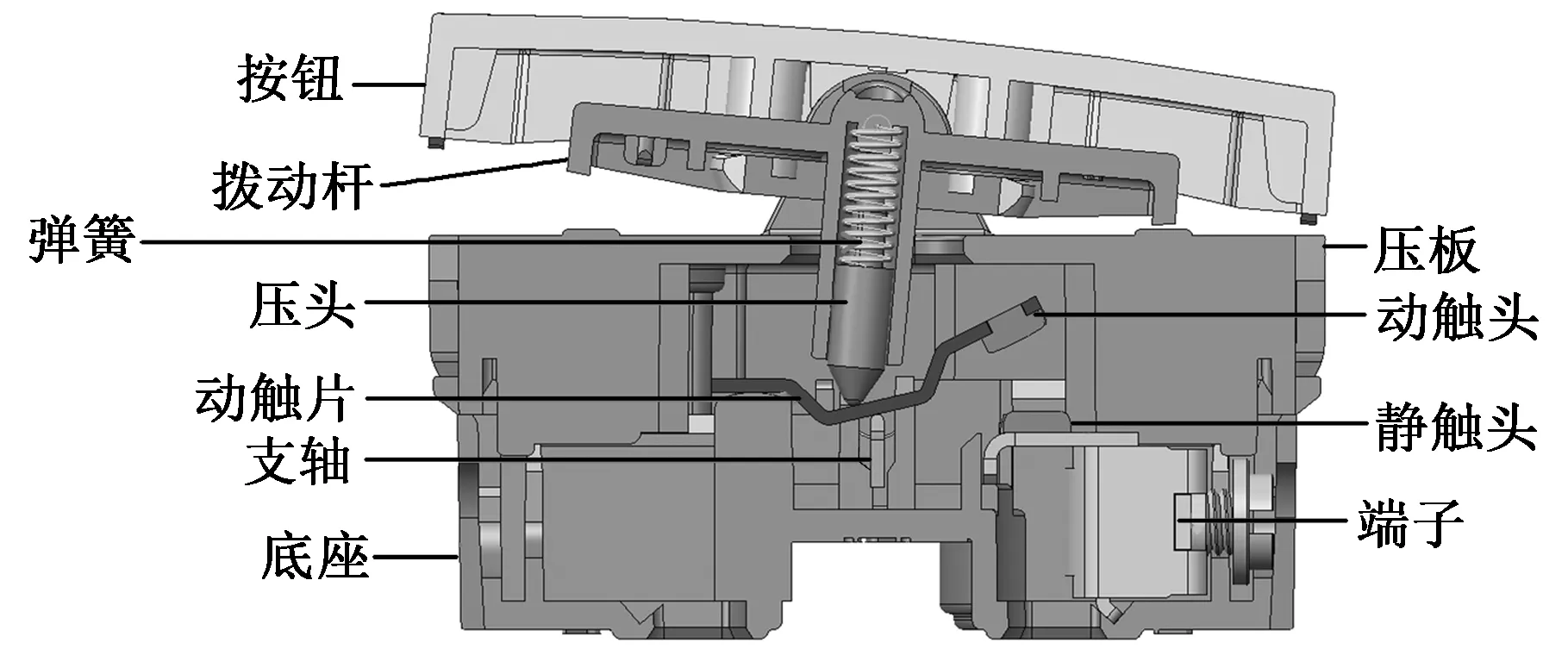
图1 开关结构Fig.1 Structure of switch
研究机构问题可先从静态分析入手,对于动触头组件可按照单个刚体的平衡问题进行静力学分析,计算出平衡状态的触头接触压力,动触头组件的受力分析如图2所示,它主要由动静触头部分和弹簧压头部分组成。
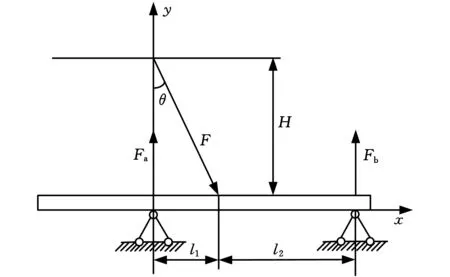
图2 跷板式开关动触片静力分析简图Fig.2 Static analysis of toggle-switch
建立平衡方程如下:
(1)
式中,Fa为支轴处接触压力;Fb为银点处接触压力;F为弹簧压力(受控于弹簧刚度及压缩量);θ为按键转动角度;l1为支轴距离压头与动触片接触点的水平距离;l2为静触头距离压头与动触片接触点的水平距离。
求解式(1)可得
(2)
其中,l1和l2通常在设计中由H、θ及静触头距离产品中心的水平距离l1+l2决定,可知触点接触压力除了受弹簧压力控制外,还主要取决于以上几个尺寸参数。
通过静态分析可以了解系统在稳定状态下的电接触稳定性,但开关装置的机械系统问题属于多刚体系统碰撞接触问题,需要进一步对开关机构进行动态分析,找到影响机械系统动态特性的关键因素。因此,CAE在设计初期对开关结构进行计算,建立动力学仿真模型,分析其动态特性及受力情况,对产品开发、试制很有帮助,能够显著提高产品设计的科学性,减少盲目性,提升设计效率,在图纸阶段通过建立分析模型对产品进行运动、强度等性能预测,使产品设计参数得到保证,有效提高设计的可靠性,缩短设计周期。
Creo软件可建立开关装置的机构模型,包括按钮(PC材料)、压头(PA66材料)、弹簧、动触片(黄铜)、静触头(黄铜)、支轴(黄铜)。除了弹簧以外,各零件均设置为刚体,并分配材料属性、重力方向,然后定义各构件间的运动副及各接触位置的3D接触,最后设置按钮上的驱动力,完成初始条件的设置。
本仿真模型根据机械系统建模,利用软件自动建立系统的拉格朗日运动方程,对每个物体分别列出带乘子的拉格朗日方程及相应的约束方程:
(3)
φi=0j=1,2,…,6
(4)
其中,K为动能;qj为系统的全部广义坐标;φi为系统约束方程;Fj为广义坐标方向上的作用力;λi为m×1拉格朗日乘子列阵;j为单个刚体自由度数。每个刚体由6个拉格朗日方程和相应的约束方程加以描述,Creo软件通过自动求解这些方程来对开关的动态机构特征进行仿真。
2 机构动态分析
跷板开关的运动是由按钮上的驱动力来带动的,所以只需对按钮进行初始值的定义。该驱动力根据实际的寿命试验机上设置的冲击力计算及测量得来,国家标准并没有对相关的开关产品进行明确规定,实际的试验过程也会根据个人经验来调整,但该力偏大或偏小都会给试验结果带来很大影响,文献[13]对此问题有相关验证。Creo软件可根据输入的驱动力进行动态仿真求解运算,得到开关闭合的动态虚拟过程,并且运用测量工具可以得到各接触位置的接触状态变化以及接触压力的值。
2.1 开关闭合过程分析
图3为开关装置闭合过程的运动仿真图。整个仿真过程周期设置为6 ms,在不考虑电因素的情况下,此动态过程属于碰撞类问题,可以观察到触头碰撞后导致的弹跳现象(图3e和图3f),并最终达到稳定状态。

(a)初始状态 (b)启动状态
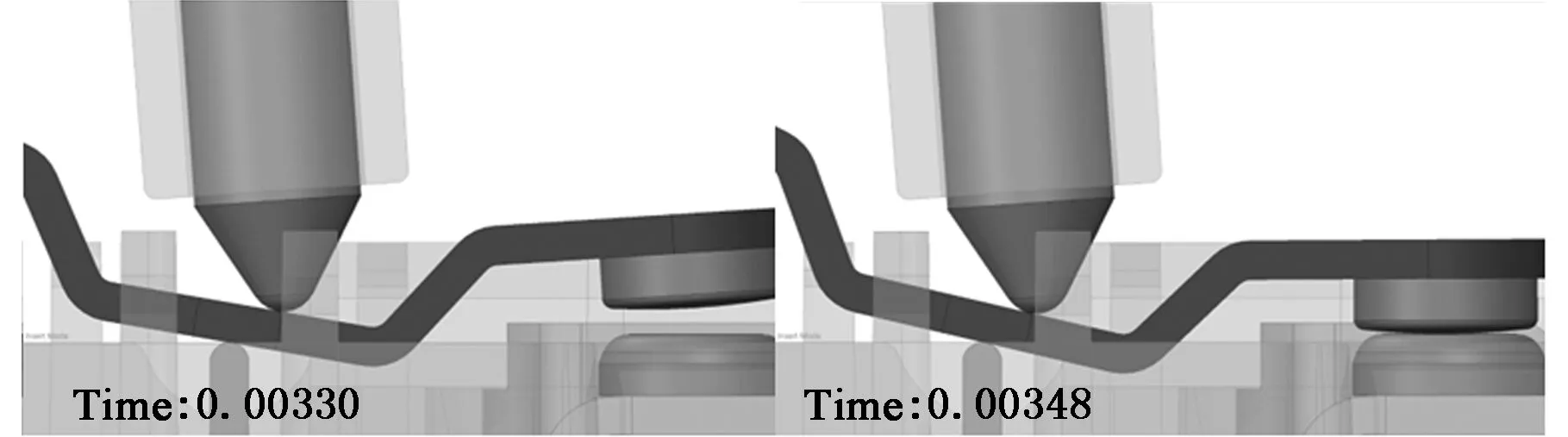
(c)趋于接触 (d)首次碰撞
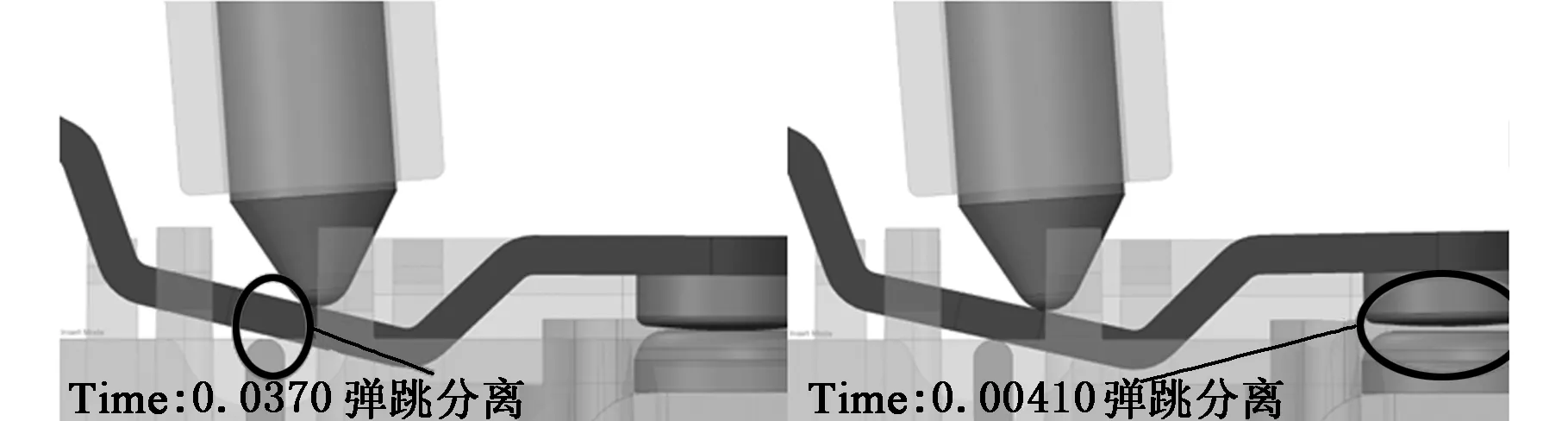
(e)支轴位置起跳 (f)支轴回落接触后,触头起跳
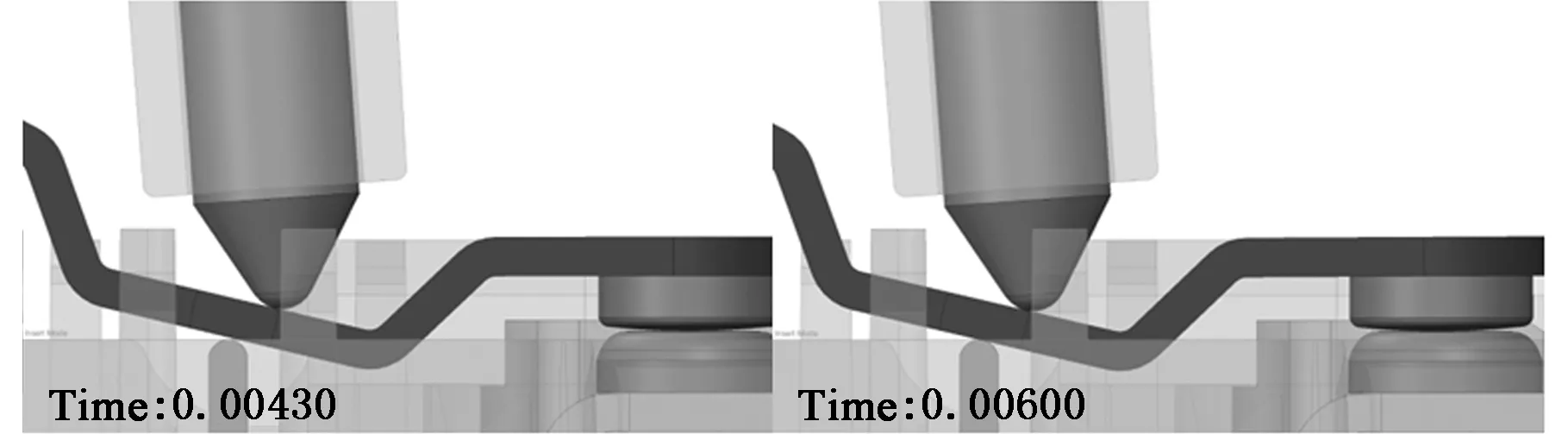
(g)支轴位置再次短暂起跳 (h)最终稳定接触图3 开关闭合过程Fig.3 Switch on phase of seesaw switch
2.2 弹跳现象分析
开关的国家标准要求产品需达到一定的电气寿命,并要求寿后温升在45 K以内,温升取决于开关内部电阻的大小,在电气寿命测试中,电接触位置弹跳引起的电弧烧蚀会增加内阻,影响到温升指标,因此,弹跳现象的分析在开关设计中相当重要。
图4所示为静动触头发生冲击碰撞过程中接触状态随时间变化的过程(图4中纵轴坐标“0”表示两者未接触,“1”表示两者接触):第一阶段(0~3.47 ms),静动触头趋于接触;第二阶段(3.48 ms),静动触头发生了第一次碰撞接触;第三阶段(3.48~4.73 ms),触头间发生了多次弹跳分离;第四阶段(4.74~6 ms),触头接触并稳定,形成了静动触头的终压力。
触头从首次接触到最终稳定,整个过程时间为1.25 ms,即触头的总弹跳时间。文献[10]中的仿真模型也发现了触头的弹跳现象。
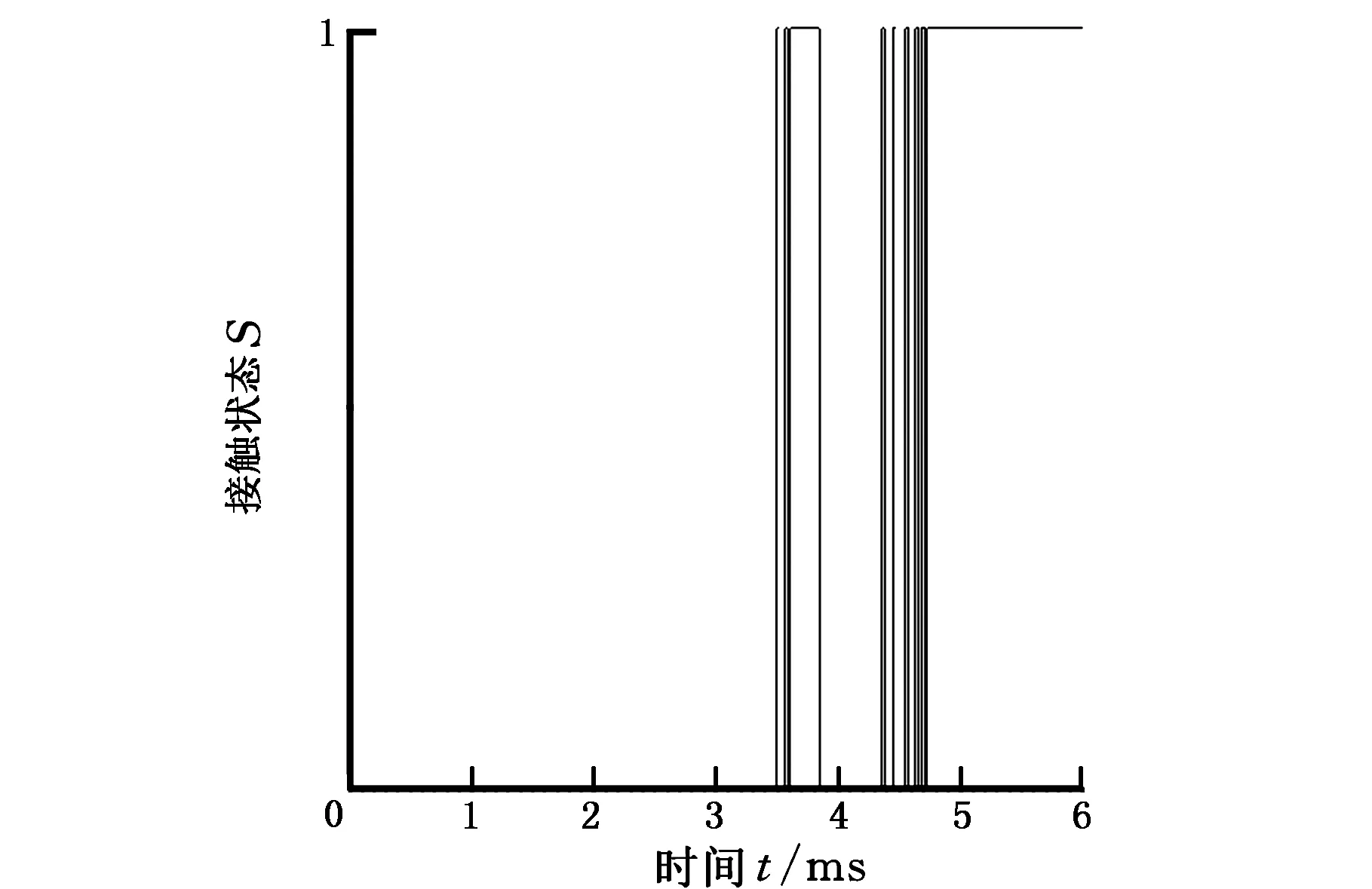
图4 静动触头的接触变化Fig.4 Contact status between contacts
仿真过程中发现的另一个重要现象是导电部件支轴与动触片间也发生了分离(图3e),这个位置也是导电连接处,这种分离由于距离较小,达不到灭弧距离,会造成支轴与动触片间产生电弧烧蚀,影响开关寿命,实际在试验中也发现了某些开关产品在此位置有烧蚀现象,如图5所示。在本仿真模型中也可以测量支轴与动触片间的接触状态,如图6所示。第一阶段(0~3.48 ms),动触片与支轴稳定接触;第二阶段(3.49~3.81 ms),动触片与支轴间发生了分离;第三阶段(3.82~4.56 ms),两者接触后多次发生弹跳分离;第四阶段(4.57~6 ms),两者恢复接触并稳定。

图5 电接触位置的电弧烧蚀Fig.5 Electric arc erosion on the Contact position
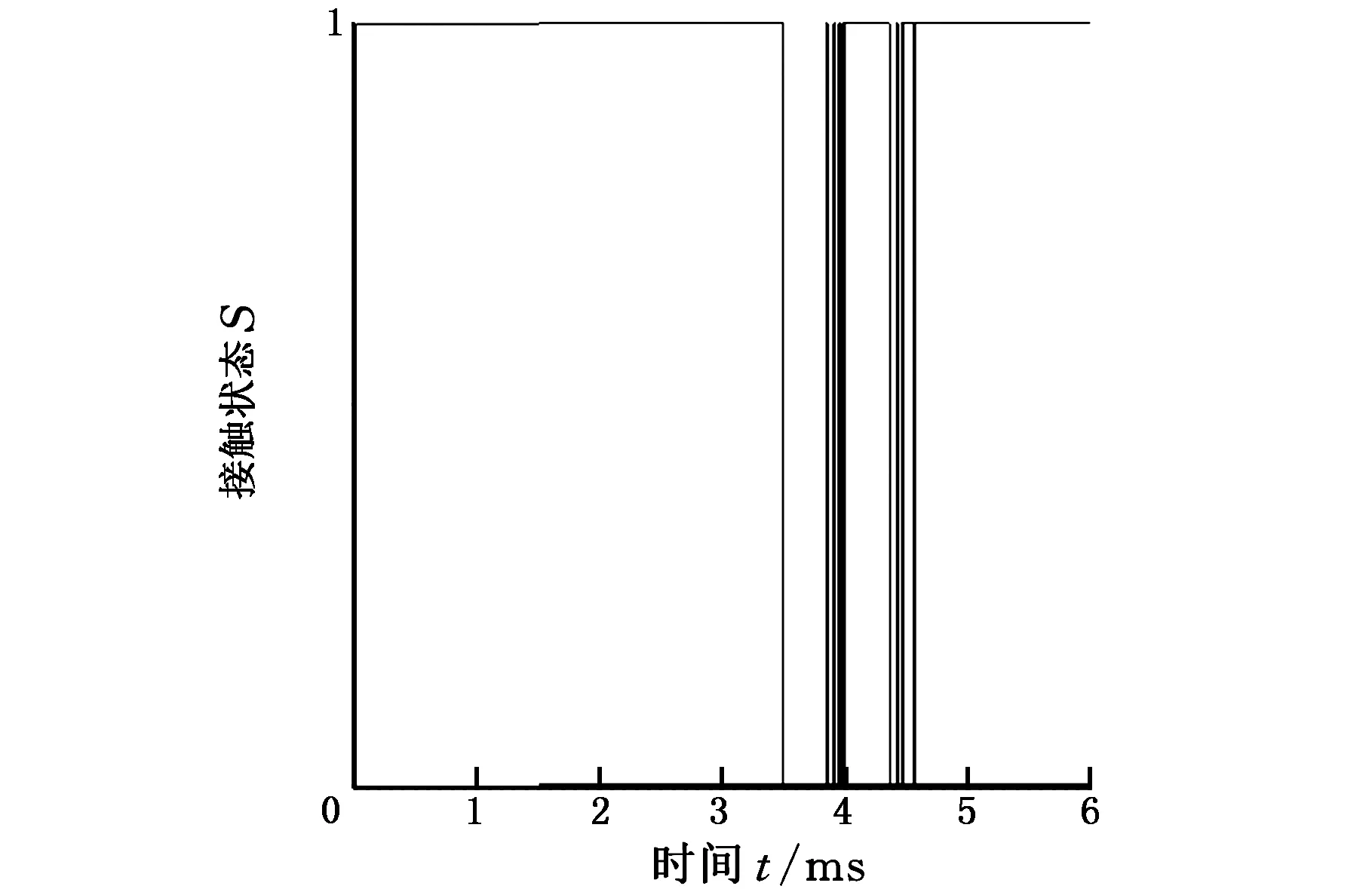
图6 动触片与支轴的接触变化Fig.6 Contact status between moving contact and pivot
由此可知,跷板机构的开关装置由于触点的碰撞,会导致动触片的整体反弹,两个接触位置均会发生分离现象。仿真模型中弹跳现象发生位置与实际产品的电弧烧蚀位置相同,可以初步判断仿真模型的正确性。
通过测量开关两端的电压波动可反映开关触头闭合的过程中发生的弹跳情况,得到图7所示的弹跳实测波形图,图中Δt即弹跳过程时间。经过多次测量后求平均值,得出开关的测试弹跳时间为1.2 ms左右。与仿真模型数值基本相符,证明本仿真模型是有效的。
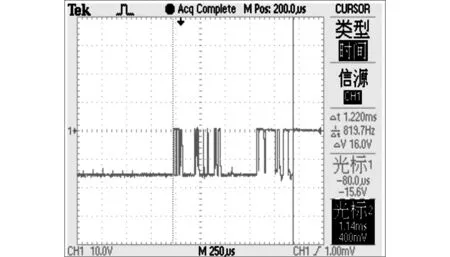
图7 开关弹跳时间实测波形图Fig.7 Bounce test of seesaw switch
3 机构设计的优化
开关运动过程中的弹跳会加剧导电部件的烧蚀,特别是支轴接触位置因其功能设计是不需要产生分离的,因此,控制支轴位置的弹跳时间是跷板式开关机构参数优化的目标。
对于减小支轴接触位置的弹跳,需进行机构的优化设计,可大致通过以下4种方式进行优化:①对弹跳发生位置的支轴和静触头零件增加减振结构,将冲击动能损耗在减振结构上;②通过机械结构的变化来改变动触片上各位置点的受力方向,避免其与支轴的弹跳;③动触头在与支轴接触的位置采用复合银层材料,使其在发生电弧烧蚀后仍存在银层接触,从而减小接触电阻,保障电气性能;④机构形式不变,优化结构及尺寸参数。前两种方式对机构形式有较大变化,需建立新的仿真模型分析优化[14];方式③受产品成本限制,不利于资源的有效利用与节约;方式④即通过建立机构运动仿真模型并采用正交试验方法获得相关设计参数的优化方案。本文建立了机构的动态仿真模型,故采用方式④进行优化。
3.1 结构及尺寸参数优化
动触片自身重力对碰撞后的受力及动态特性有影响,所以减小动触片的质量可以起到结构上的性能优化作用,如图8所示。

图8 动触片质量减小Fig.8 Weight loss of movable contact
如图9所示,跷板式开关的结构尺寸参数包括:按钮摆动角度θ、旋转中心间距L1、动静触头开距L2、静触头间距L3、压头头部直径D、弹簧弹性系数Ks及预压量h。以上尺寸参数决定了开关的动态特性(弹跳过程)及触头接触压力(包括过程中的压力变化和终压力)。其中,静触头间距L3受产品外形、安装要求以及生产装配的限制,需要固定尺寸;动静触头开距L2按产品的国家标准中的电气间隙要求大于3 mm,但触头开距越大,碰撞后的反弹也会越大,因此,该尺寸也可以按留取一定余量的最小值固定;而压头零件本身体积很小,其头部直径越大,摩擦力越大,头部直径太小,则会磨损动触片,所以也可按经验值固定尺寸。因此,在优化设计过程中,L2、L3、D这三项都可定义为设计常量。在大气空气中频繁操作的低压接触器、开关等,其单位电流的接触力需达到0.06~0.15 N,本文中的开关装置按照10 A的标准设计,其动静触头间的接触压力应控制在0.6~1.5 N,因此,接触压力定义为约束条件,按钮摆动角度、旋转中心间距、弹簧弹性系数及预压量可选取为设计变量。另外,触头位置的弹跳不能大范围波动,也应该作为约束条件,其范围值可在优化迭代过程中用数据筛选来参考控制。
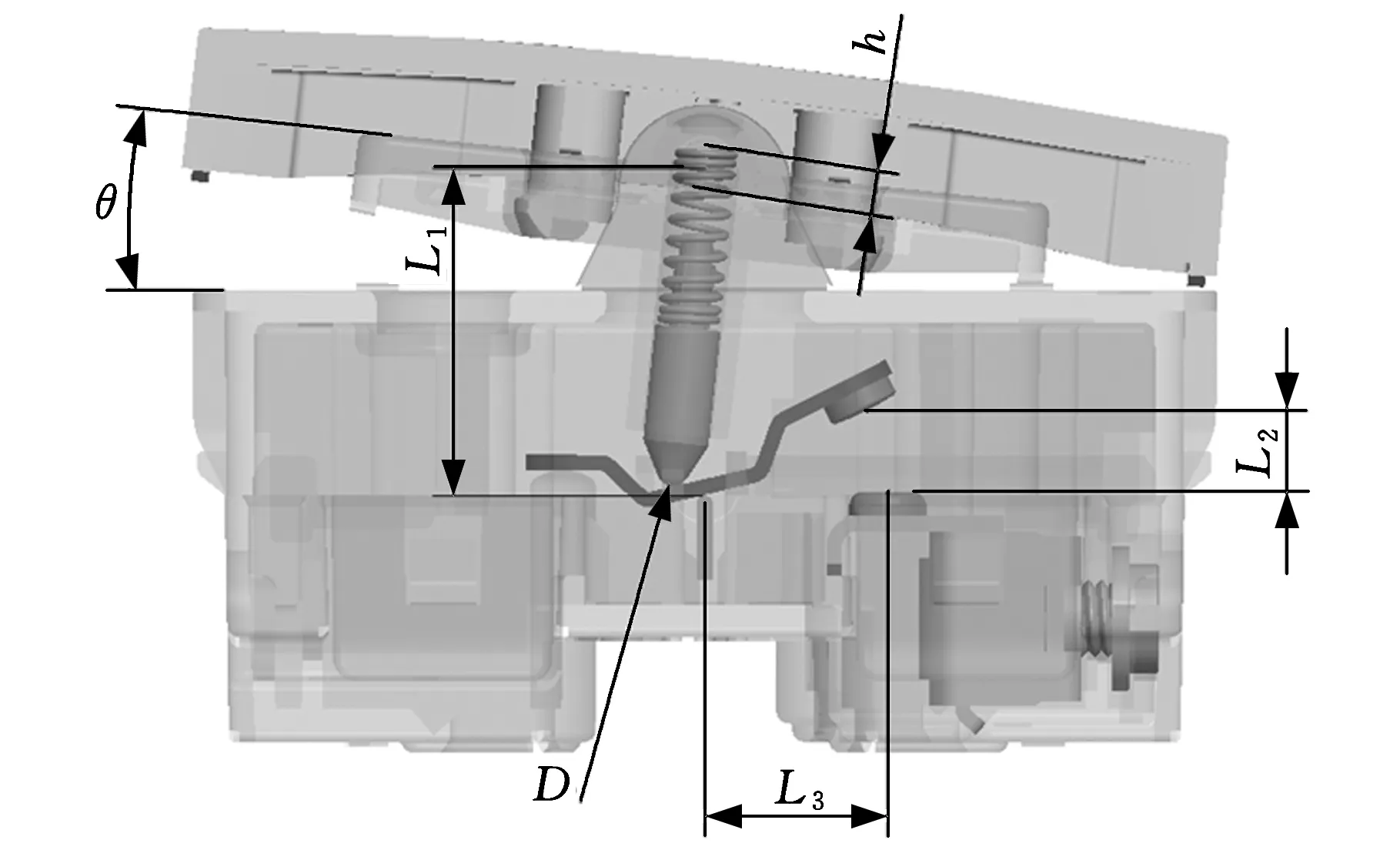
图9 跷板式开关的结构及其尺寸参数Fig.9 Key dimensions of switch
本文仿真模型的优化设计模型如下。
优化目标:支轴接触位置弹跳时间最小。
约束条件:动静触头接触压力F为0.6~1.5 N;触头接触位置弹跳时间较短。
设计变量:4°≤θ≤6°;15 mm≤L1≤17 mm;1.5 N/mm≤Ks≤2.5 N/mm;4 mm≤h≤5 mm。
目前低压电器的优化设计基于仿真模型上的优化方法通常采用仿真软件中的优化分析工具进行,将需要分析的参数设定为设计变量,分别改变各设计变量的值,通过选择的优化算法迭代计算出目标函数的输出值。对于本仿真模型,由于是接触碰撞问题,其中设置了大量的3D接触连接,软件计算非常耗时,故不能直接采用软件的自动迭代。为此,本文采用正交试验法,以较少的仿真次数来计算得到各设计变量对优化目标的影响的显著性,提高优化设计效率,并得到最优的参数设计方案。
本正交试验的因素来源于优化设计数学模型中的设计变量,即按钮摆动角度、弹簧弹性系数、预压量及旋转中心间距,这四个因素记作A、B、C、D,其中,因素A、B、D分别取三个水平,因素C范围较小,取两个水平。因素水平见表1。
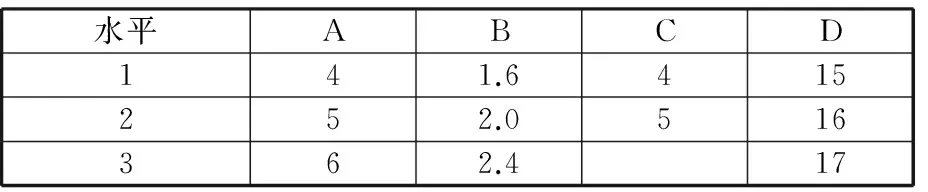
表1 因素水平表Tab.1 Level of factor form
建立L9(34)正交表,按照正交表中各试验号对应的水平组合进行仿真试验,得到极差分析结果,见表2。

表2 支轴位置弹跳时间的正交试验极差分析Tab.2 Range analysis of bounce time on pivot position
从极差分析结果比较可以看出,各项因素无显著影响,只是相对来说因素B的影响大一些,总地来说,本试验最优方案应该是A1B3C2D3,最优方案仿真后的各项指标结果见表3。

表3 优化方案仿真分析结果Tab.3 Simulation analysis result of the optimization scheme
从本试验过程及结果看来,触头接触压力和弹跳时间均处于合理水平,综合指标较好。即对于跷板机构,增大弹簧预压力并通过控制按键摆动角度来适当减小压头滑动距离有助于解决支轴位置的弹跳问题,但需控制参数改变带来的对触头接触压力和弹跳时间的影响。
3.2 实验验证及分析
现有低压电器方面的机构优化通常是基于典型的连杆机构的优化,其大致分为两个方向:一种是提高开断速度的优化设计;一种是减小动触头合闸弹跳的优化设计[15-16]。而对于跷板式开关机构这种带接触碰撞的多体机械系统,主要优化方向就是缩短系统弹跳时间,但与连杆机构的合闸弹跳不同,该机构自由度更高,弹跳位置不止于动静触头之间,现有的优化设计通常根据设计者的经验,采用简单的枚举法来计算合适的触头接触压力,再通过实验对比获取相对较优的目标值,因此,对于优化结果往往具有不确定性及低效率。
为了验证本文优化方法结果的可靠性,在对实体样机进行优化后,对原机构和优化机构进行了实验测试对比。将开关试样按国标进行荧光灯负载测试。图10所示为测试后的试样对比,左边为优化前试样,右边为优化后试样,可以看到除了触头处的正常烧蚀外,支轴处仅轻微烧蚀,且被机械磨损将积碳清洁了,可以认为动触片与支轴间的弹跳很小、时间很短,与仿真结果吻合。
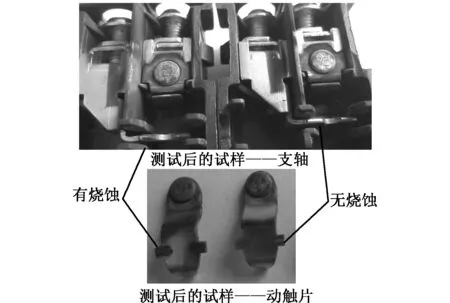
图10 优化前后测试样品状态对比Fig.10 Specimens compare between before and after of optimization
通过实验可以证实本文仿真模型及优化方法能有效地提高低压开关的机构优化设计效率,多次实验的结果证明,本优化方法具有较高的鲁棒性,对于研发设计具有一定的价值。
4 结语
有别于现有的低压开关仿真模型研究,本文使用Creo软件建立了完整的一体化虚拟样机模型,该模型具有很好的灵活性,并且通过采用同一软件平台,避免了传统方法中实体建模和仿真建模采用各自特有软件而导致的每次调整设计都需重复设置的繁琐操作。CAD与CAE之间的无缝链接,保证了模型传递过程中的一致性,大大提升了仿真设计的效率。利用了参数化的优势,设计及修改过程简便,结果体现方便,提高了设计效率。本文采用的正交试验优化方法对本领域开关装置的优化研究具有普遍的适用性,能有效缩短优化设计时间,避免大量重复试验,且有助于降低产品成本,提高企业竞争力。
[1] 陈德桂. 虚拟样机成为开发新型低压电器的关键技术[J].低压电器,2002(6):3-7. CHEN Degui. Virtual Prototype to Be a Key Technique for Development of New Low Voltage Electrical Apparatus [J]. Low Voltage Apparatus,2002(6):3-7.
[2] 任晓霞. ANSYS在低压电器触头接触稳态热分析中的应用[J].电气技术,2008(12):83-85. REN Xiaoxia. The Application of ANSYS on Steady Thermal Characteristic Analysis of Low Voltage Electrical Apparatus Contacts [J]. Electrical Engineering,2008(12):83-85.
[3] 王伟宗,吴翊,荣命哲,等.低压开关电器稳态电弧特性的仿真[J].低压电器,2009(23):6-9. WANG Weizong, WU Yi, RONG Mingzhe, et al. Simulation of Electric Arc in Low-voltage Switch[J]. Low Voltage Apparatus,2009(23):6-9.
[4] 李兴文,陈德桂,孙志强,等.交流接触器动态过程及触头弹跳的数值分析与实验研究[J].中国电机工程学报,2004,24(9):229-233. LI Xingwen, CHEN Degui, SUN Zhiqiang,et al. Numberial Analysis and Experimental Investigation of Dynamic Behavior and Contact Bounce of AC Contactor[J]. Proceedings of the Chinese Society for Electrical Engineering,2004,24(9):229-233.
[5] 孙园,许志红.基于ANSYS 软件的智能交流接触器电磁系统设计[J].低压电器,2006(11):3-8. SUN Yuan, XU Zhihong. Design of Electromagnetic System for Intelligent AC Contactor Based on ANSYS[J]. Low Voltage Apparatus,2006(11):3-8.
[6] 潘锋,邹慧君,李广利.小型断路器机构的动力学研究[J].机械设计与研究,2007,23(6):98-108. PAN Feng, ZOU Huijun, LI Guangli. Dynamic Research of Mechanism in Miniature Circuit Breaker[J].Machine Design and Research,2007,23(6):98-108.
[7] 张迎春. 基于ADAMS的低压断路器优化设计及仿真研究[D].镇江:江苏大学,2005. ZHANG Yingchun.Optimization Design and Simulation Research of Low-voltage Circuit Breaker Based on ADAMS[D].Zhenjiang:Jiangsu University,2005.
[8] 葛永斌,许利战.基于Pro/E的微型断路器仿真分析[J]. 低压电器,2010(24):16-19. GE Yongbin, XU Lizhan. Simulation Analysis of Miniature Circuit Breaker Based on Pro/E[J]. Low Voltage Apparatus,2010(24):16-19.
[9] 张敬菽,陈德桂,刘洪武.低压断路器操作机构的动态仿真与优化设计[J].中国电机工程学报,2004,24(3):102-107. ZHANG Jingshu, CHEN Degui, LIU Hongwu. Dynamic Simulation and Optimum Design of Low-voltage Ciricuit Breaker[J]. Proceedings of the Chinese Society for Electrical Engineering,2004,24(3):102-107.
[10] 翟芳,张威,李东波.跷板式开关装置动力学建模与仿真[J].机械设计与研究,2009,25(5):7-9. QU Fang, ZHANG Wei, LI Dongbo. The Dynamic Modeling and Simulation Analysis of the Toggle-switch[J].Machine Design and Research,2009,25(5):7-9.
[11] 瞿芳,李东波. 跷板式开关装置触点力影响因素[J].机械设计与研究,2012,28(6):121-123. QU Fang, LI Dongbo. Analysis on Influence Factors of Toggle-switch Contact Force[J].Machine Design and Research,2012,28(6):121-123.
[12] 何新. 跷板式开关装置机械动态性能分析[D].南京:南京理工大学,2008. HE Xin. Mechanical Dynamic Performance Analysis of the Toggle-switch[D]. Nanjing:Nanjing University of Science and Technology, 2008.
[13] 陈锋. 家用开关的力学参数需规定[J].中国质量技术监督,2004(8):36. CHEN Feng. Mechanical Parameter of Switch for Household Need Be Regulated[J]. China Quality Supervision, 2004(8):36.
[14] 刘向军,黄蔚偈,兰太寿.磁保持继电器动作机构动态过程仿真分析和验证[J].低压电器,2013(2):5-9. LIU Xiangjun, HUANG Weijie, LAN Taishou.Dynamic Process Simulation and Verification of Magnetic Latching Relay’s Action Mechanism[J]. Low Voltage Apparatus,2013(2):5-9.
[15] 巫世晶, 李菲, 赵文强,等.含多间隙副特高压断路器传动机构动力学特性研究[J].中国机械工程,2015,26(13):1719-1724. WU Shijing, LI Fei, ZHAO Wenqiang, et al. Research on Driving Mechanism Dynamics in UHV Breaker with Multiple Clearance Joints [J]. China Mechanical Engineering,2015,26(13):1719-1724.
[16] 陈文华,张文,潘骏,等.小型断路器操作机构的动作可靠性分析[J].中国机械工程,2015,26(21):2918-2922.
CHEN Wenhua, ZHANG Wen, PAN Jun,et al.Action Reliability Analysis of Operating Mechanism in Miniature Circuit Breaker [J]. China Mechanical Engineering,2015,26(21):2918-2922.
(编辑 陈 勇)
Dynamic Simulation Analysis and Optimization of Low-voltage Switches
Tan Wei1,2Zha Hailin2Xiao Xing2
1.School of Mechanical Engineering, Shanghai Jiao Tong University,Shanghai,200030 2.Siemens Ltd., China, Shanghai Branch, Shanghai,201108
In the optimum design of low-voltage switches, it was necessary to analyze the dynamic behaviors. The bounces caused by impact contacts in the mechanical system would lead to arc ablations, and directly a effect the electrical lifetimes of the switches. With virtual prototyping technologies to do the dynamic simulations for the closing processes of the switches, the dynamic behaviors of the mechanical system and the changes of the contact status were investigated. The simulation model was verified by comparing with the bounce time tests of the switch closing processes, and the bounce positions were the same as the arc ablation positions of the test samples. The influences of the design parameters on the contact bounce of the switches were investigated through the orthogonal test of the simulation model, and the optimization method was designed and verified by the test samples.
low-voltage switch; dynamic simulation; contact bounce;orthogonal test
2016-06-15
TH122
10.3969/j.issn.1004-132X.2017.09.013
