复合式直升机技术特点及发展概述
2017-05-11
(北京航空航天大学航空科学与工程学院,北京 100191)
直升机按平衡反扭矩形式达到实用来分类有4种:(1)传统的单旋翼带尾桨式直升机,此类直升机具有很长的发展历史,技术成熟,结构、操纵简单,成本较低,是当今直升机的主流形式;(2)纵列式横列式双旋翼直升机,这两类直升机各有其优点与不足,比如前者允许重心变化范围大,可用于重载机型,后者的短翼可卸载旋翼的负荷;(3)共轴双旋翼直升机,旋翼上下安装转向相反,反扭矩平衡,纵向尺寸小,有很高的悬停效率,但是传动操纵机构略微复杂;(4)复合式直升机,在保留垂起和低速优势下,融合了固定翼飞机的高速特性。
常规直升机的缺点在于其速度的局限性。当速度过高时,前行桨叶与后行桨叶的动压差很大,以铰接式旋翼为例,后行桨叶剖面气动流速等于桨叶在剖面处运动线速度减去来流速度,若不加控制,速度减小导致动压降低,则桨叶升力降低;前行桨叶剖面气动流速等于桨叶在剖面处运动线速度加上来流速度,动压增加,旋翼向上挥舞。这样动压在不同旋转位置的变化导致了桨盘在不加操纵情况下的向后倒和侧倒。为了使直升机得到向前的拉力,就必须要施加周期变距操纵,使旋翼前倾获得向前的拉力。这种操纵使后行桨叶桨距角增大,桨叶升力增加,前行桨叶桨距角减小,桨叶向下挥舞,而最终使得旋翼前倾。随着速度的提高,施加操纵后,后行桨叶的翼型将到达失速迎角,同时后行桨叶桨根部分出现反流区使旋翼整体升力下降,拉力减少,限制了速度的提升。桨尖速度很大时,会产生激波失速,导致阻力增加。这些因素都限制了常规布局直升机速度的提升。
提高直升机的最大飞行速度主要受到3方面的限制:
(1)局部激波限制[1]。
迎风旋转的前行桨叶由于空气流速的叠加导致产生了局部激波,而局部激波会大大降低旋翼气动效率,从而影响旋翼前向拉力。
(2)气流分离限制。
顺风旋转的后行桨叶由于空气流速的叠加使其实际空气流速大大降低,为了平衡前行桨叶产生的升力,后行桨叶将增大迎角,从而导致其表面气流产生分离,这也会大大降低旋翼的气动效率,导致旋翼前向拉力减小(图1)。
(3)桨盘前倾限制。
随着飞行速度的增加,气动阻力也会增加,从而要求旋翼桨盘的前向拉力分量也增加,桨盘前倾角也会相应加大。桨盘前倾增加时,迎面气流相对于旋翼的轴向分量增加,使得后行桨叶、桨尖及桨根迎角的不均匀程度增加,从而增大气流分离的不利影响。桨盘前倾过大还会对直升机振动水平产生不利影响。
高速旋翼飞行器可以分为倾转旋翼式、复合式直升机和停转旋翼式。一般意义上讲复合式直升机,是指将直升机和固定翼结合起来,在常规直升机的基础上加装辅助升力系统和辅助推力系统。复合式直升机按旋翼的种类也可以划分为普通旋翼复合式直升机和刚性旋翼复合式直升机。
复合式直升机垂直起降、悬停和低速飞行时类似于直升机,在中高速前飞、爬升状态下类似于固定翼飞机。随着前飞速度的提高,机翼逐步承载,旋翼逐步卸载,旋翼桨叶剖面迎角减小,后行桨叶的气流分离得以推迟;由于桨尖临界马赫数也随桨尖迎角减小而增大,因此前行桨叶的激波失速也得以推迟。同时,随着速度的增加,大部分的前进阻力将由推力螺旋桨克服,从而大大减小了桨盘和机身前倾所带来的前飞阻力[2]。
与此同时,复合式直升机的其他一些特性也大为改善:
(1)振动水平降低[3]。
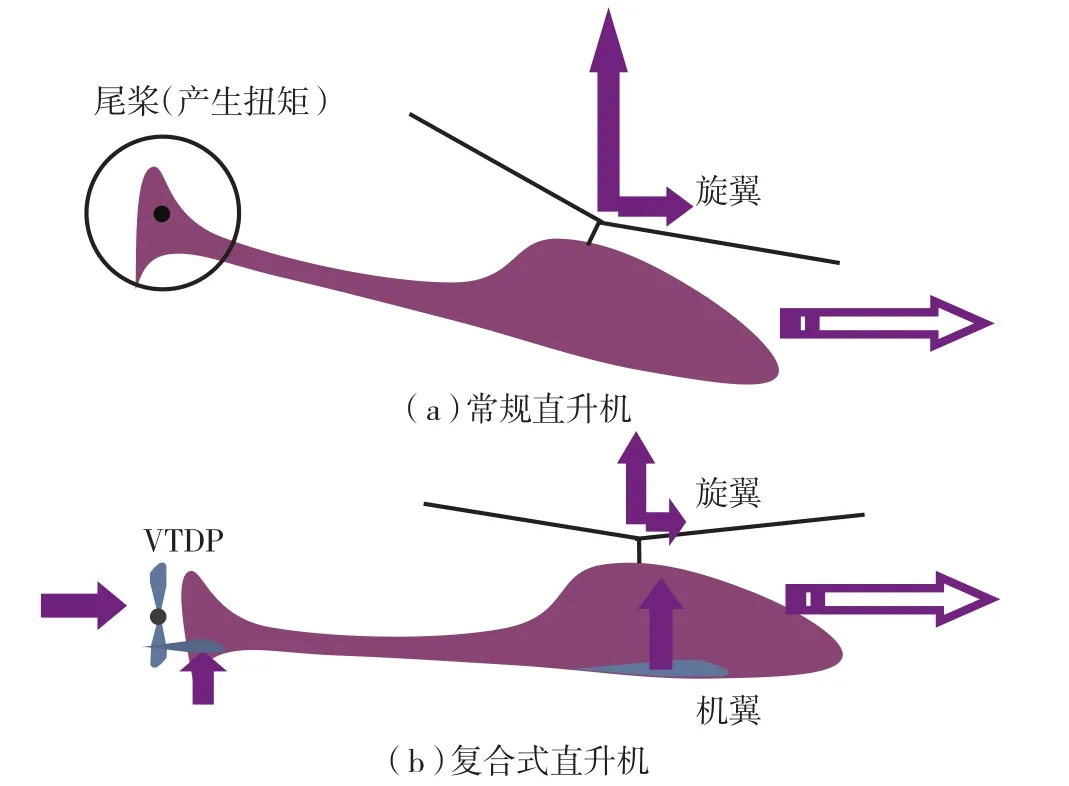
图1 常规型式直升机和复合式直升机前飞时的区别Fig.1 Differences between traditional helicopter and compound helicopter at forward flight
在复合式直升机上, 由于旋翼被卸载,作为振源的力也就随之减小, 因此振动水平大大降低, 尤其在高速情况下, 这一优势更为明显。
(2)航程航时提高。
复合式直升机有中高速气动效率高的特点,增加了航程和航时。
(3)机动性提高。
由于有辅助升力系统和辅助推/拉力系统的协助,复合式直升机在提供机动动作所需的力和力矩方面游刃有余。而且,与倾转旋翼机相比,复合式直升机悬停时的桨盘载荷小,而在大速度时,旋翼也提供升力与机翼协同合作。
复合式直升机的缺点是,由于增加了辅助升力和推力系统,使得全系统的重量有所增加。另外,由于各系统间的相互气动干扰,尤其是旋翼和机翼间的相互气动干扰,使得复合式直升机悬停效率比常规型式直升机低。同时复合机翼增加了直升机进入自旋状态的难度,使飞机的自转下滑能力下降,安全性有损。复合式直升机的控制也是一大难点,为了不增加驾驶员的负担,控制需要全面考虑复合布局之后各种干扰对飞行包线飞行性能产生的影响,并完成平滑过渡,分配操纵与动力。
1 复合式型号研制概况
1.1 洛克希德“夏延”
冷战时期,值得一提的一个型号是洛克希德的“夏延”(Lockheed AH-56A Cheyenne)。“夏延”的方案比较特殊,它的设计介于直升机与旋翼机之间,采用刚性单旋翼,加前推发动机装置,起飞时以直升机模式起飞,高速时切断旋翼动力时期进入自转状态。这个飞机在试飞过程中发现从直升机转旋翼的过渡过程非常难控制,在出现几次坠机之后,军方撤销支持,成为半途而废的产品。该型号创意很新,采用了刚性旋翼,机构简单,在一定程度上增加了飞机的机动性,同时复合式布局突破了速度性能,令人眼前一亮,但是飞机各大部件之间问题很多,没有得到足够的支持去一一解决,最终中止。可见飞行器的研制尤其是军机种类发展的成功与否很大程度上取决于是否应时,依旧无法判断型号的潜力[4]。
1.2 美国“速度鹰”
20世纪90 年代,美国军方用“环形尾”的概念研制了 “速度鹰”(Speed Hawk)(见图2),不仅提高了速度,还将航程提高了3倍,使“速度鹰”的航程和 F-18 战斗机相当,用作海军的搜索救援直升机性能突出[6]。同样的概念还用在 AH-64“阿帕奇”攻击直升机上,使其速度提高了25%。
1.3 西科斯基复合式直升机X2
在美国休斯敦的一次直升机展上,西科斯基飞机公司解密了其最新的X2验证攻击直升机(见图3)。该机空重2406kg,速度可达463km/h,是美国现役“黑鹰”直升机速度的2 倍,“阿帕奇”直升机速度的1.5 倍。
1.4 卡莫夫设计局复合式直升机卡-92
“HeliRussia-2008”展览上,卡莫夫设计局展出了卡-92新概念直升机(见图4)。卡-92与美国西科斯基公司的X2验证机的构型类似,也采用共轴双旋翼加推力螺旋桨的型式,只是其推力螺旋桨采用的是共轴双桨形式。
1.5 欧直公司复合式直升机X3
2010年9月6日,欧直公司X3型直升机原型机(见图5)正式对公众展示并完成了首次试飞。欧直公司预计该型直升机最终将能够达到约407km/h的巡航速度。该机主旋翼有5片桨叶,并在机翼两侧短翼上各装有一个拉力桨,以提供前飞拉力。
2 理论技术发展
2.1 总体构型及总体参数的研究
国外学者Orchard等[7]2003年预测了传统复合式直升机的总体构型方案及发展趋势,如采用较低的机翼位置布置,尽可能小的机翼面积,采用襟副翼的形式并在悬停时将襟副翼下折以减小悬停时机翼对旋翼下洗流的阻挡;采用涵道风扇或者螺旋桨的型式作为辅助推力系统;采用废阻力较小的桨毂形式以及先进的旋翼桨尖几何形状等。几年后西科斯基公司推出以刚性共轴双旋翼为主体的X2直升机,突破了速度极限,这却是2003年无法预料到的以旋翼为主体的复合式发展。技术永远在不断地进步。

图2 “速度鹰”(Speed Hawk)和其“环形尾”Fig.2 Speed Hawk and its ducted propeller

图3 西科斯基复合式直升机X2Fig.3 Sikorsky X2 compound helicopter
美国NASA提出了一项发展民用重型旋翼飞行器的招标计划[8],技术指标为航程1200n mail(约2200km),载120人,巡航速度 0.6马赫(约 650km/h),巡航高度大于22000英尺(约6.7km)。波音公司的竞标方案是以纵列式直升机CH-47“支奴干”为技术基础的“大型复合式纵列直升机方案”(LCTC)(见图6);西科斯基的竞标方案是“大型前行桨叶概念复合式直升机方案”(LABC)(见图7),延续其“前行桨叶概念”的技术优势。该项目针对的几种重型高速民用旋翼飞行器方案进行了对比研究,分别详细阐述了大型复合式纵列直升机和复合式共轴直升机的总体方案,并指出重型高速旋翼飞行器总体方案满足设计要求的重点,即减小机身废阻力、采用较小的桨盘载荷、减小结构重量以及提高动力系统和传动系统的效率。同时还指出方案中实施的难点,包括重量轻扭矩大的传动系统,结合了良好气动性能和结构效率的旋翼/机翼系统,以及高集成度的飞行控制系统等。
图4 卡莫夫设计局复合式直升机卡-92Fig.4 Kamov Ka-92 compound helicopter

图5 欧直公司复合式直升机X3Fig.5 Eurcopter X3 compound helicopter

图6 大型复合式纵列直升机方案(LCTC)Fig.6 Large Civil Tandem Compound helicopter
对于复合式飞机总体优化性能来讲,不少学者利用CANRAD Ⅱ分析软件对直升机气动性能进行计算。例如NASA“民用重型旋翼飞行器研究计划”对一款复合式直升机进行了总体参数优化研究[9]。研究结果表明,较低的机翼载荷和较高的桨叶载荷(弦长较窄的桨叶)可提高全机升阻比;对于该项目所研究的复合式直升机,最优的升力分配为旋翼承担总重的8%~9%,机翼承担总重的91%~92%。
2.2 气动干扰
复合式直升机旋翼、机翼和机身之间的气动干扰可以采用自由尾迹和源板法进行研究[10]。Felker等[11]针对倾转旋翼的旋翼/机翼的气动干扰进行了试验研究,分别分析了旋翼对机翼以及机翼对旋翼气动力和力矩的影响。试验结果显示,可将机翼的气动干扰区域分为滑流区(受旋翼下洗流影响的区域)和自由流区并分别进行受力分析。采用自由尾迹和涡格法的混合算法,发现在高速情况下,机翼的位置对气动干扰影响很小;对于单旋翼复合式直升机,旋翼产生的不对称涡系会造成机翼升力的不对称,从而产生一定的滚转力矩[12]。
在不同速度下,旋翼涡系受到机翼涡系干扰作用,形状会有所变化。图8、9为前进比为0.1和0.4情况下的涡系结构后视图,为清晰展示只画出了部分涡线。
可见,随前飞速度增加,机翼升力增加,对旋翼涡系产生的下洗诱导速度也增加,旋翼涡系中部被明显“下拉”。

图7 大型“前行桨叶概念”复合式直升机方案(LABC)Fig.7 Large "Advance Blade Concept" compound helicopter
对于复合式直升机来讲,前飞时由于旋翼动态干扰,无论是在桨叶展向还是不同旋翼方位角下,干扰速度都是高度不均匀分布的,这也就导致了升力的不均匀分布。从图10可以看出,内侧机翼段前行桨叶侧升力作用明显高于其他段。机翼的作用当然也会影响旋翼的性能,机翼的过前或者过后放置都会对旋翼配平有不好的影响。

图8 前进比0.1时旋翼涡系形状Fig.8 Rotor vortices at advance rate of 0.1
图9 前进比0.4时旋翼涡系形状Fig.9 Rotor vortices at advance rate of 0.4
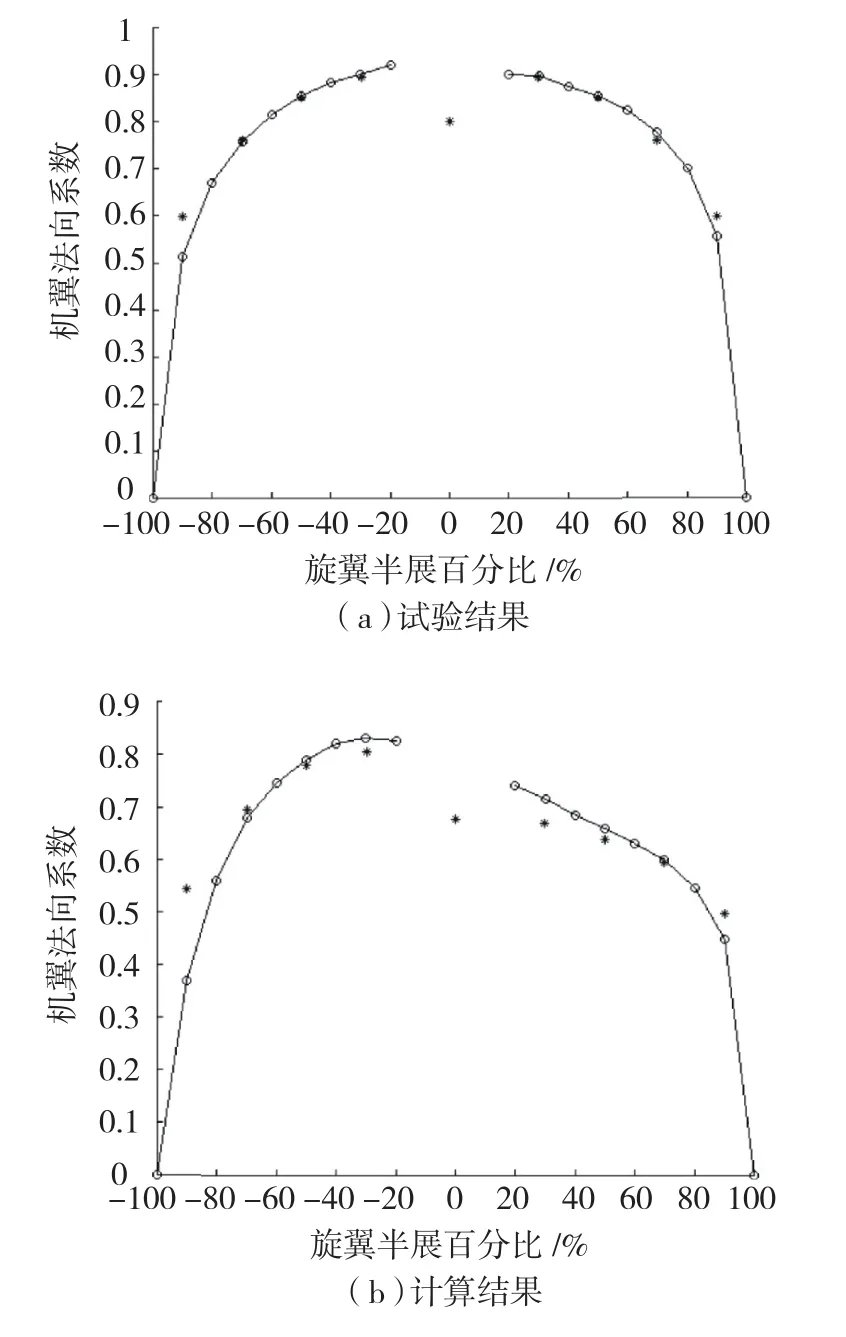
图10 旋翼干扰对于复合式直升机机翼升力的影响Fig.10 Influence of rotor interferece on wing lift of the compound helicopter
2.3 操纵策略的研究
美国马里兰大学的Mathieu Amiraux等[13]在AHS直升机设计竞赛中采用复合式直升机方案(见图11),对操纵策略进行了研究。该方案悬停时采用常规直升机操纵方式进行操纵;高速前飞时,为增加操纵性,采用直升机和固定翼混合操纵方式进行操纵,即纵向周期变距和升降舵联动,横向周期变距和副翼联动,两副拉力螺旋桨总距差动操纵和方向舵联动。
国内学者对UH-60L/VTDP 复合式高速直升机进行了配平操纵策略研究[14],所采用的配平操纵策略为,旋翼转速随前飞速度按线性比例函数关系变化到某个值,固定翼操纵系统和直升机操纵系统在整个飞行过程中均参与操纵,各对应操纵通道采用序列二次规划算法进行操纵优化分配,优化的目标为直升机需用功率最小,约束条件为合外力和合外力矩为0。
当然线性过渡并不是最好的选择。操纵策略的设计是一种取优的过程,用优化算法可以得到应采取的操纵倾角数值,以达到最好的过渡效果。Ferguson等[15]对于一款共轴复合式直升机过渡操纵进行优化得到图12所示的结果,总距角减小、推力增加时,飞机从直升机模式向固定翼模式转换。这个过程不应该是线性的,它的特征根据不同复合式布局而改变,根据不同飞行状态而改变。
为了延缓激波的产生,减小振动,复合式飞机常采用在高速前飞时降低旋翼转速的策略。西科斯基X2的旋翼转速在高速时降低20%。 Yeo等[16]将优化的巡航时主旋翼转速从750ft/s降低到520ft/s,巡航速度为250kt,巡航时到达的马赫数为0.8[16]。图13为降低旋翼转速的示意图(其中Ω为旋翼转速,Ωhover为悬翼悬停转速,Mtip为旋翼桨尖马赫数)。
2.4 操稳特性的研究
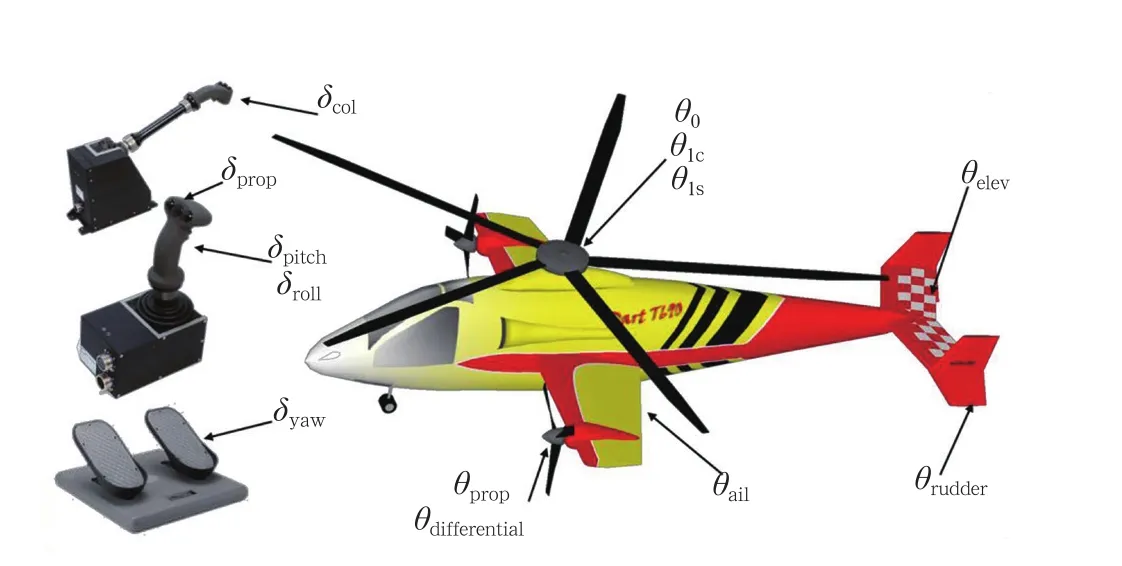
图11 马里兰大学复合式直升机方案及操纵示意图Fig.11 Scheme and control illustration of compound helicopter from University of Maryland
国内外对于复合式直升机操稳特性的研究还不多。Matthew等[17]对变旋翼转速复合式直升机高前进比下的操稳特性进行了分析。国内学者刘成[18]参考欧直公司X3验证机的设计思想,以国产Z-11直升机为基础,提出了ZF-1高速直升机气动布局方案并进行了飞行动力学研究。在飞行动力学研究中,对ZF-1高速直升机小扰动线化运动方程进行变换得到了运动特征方程,求解得到特征根并进行了稳定根及运动模态分析;建立了操纵响应计算模型,分别对总距、纵横向周期变距及左右涵道风扇桨距施加阶跃操纵(升降舵、方向舵及副翼等固定翼操纵系统已与对应的直升机操纵系统联动),并对引起的机体响应进行了计算分析。
2.5 旋翼桨叶结构研究
直升机高速前飞时,其旋翼工作在更加复杂的气动环境中,前行桨叶桨尖易产生激波,大大增加旋翼旋转阻力以及全机振动水平;后行桨叶易产生气流分离和失速,造成旋转阻力增加,升力减小,桨盘侧倾力矩增加,阻止了前飞速度的进一步提高。
复合材料的应用推动了旋翼桨叶气动设计的迅速发展,高性能先进翼型、先进的桨尖形状及桨叶气动外形优化设计提高了旋翼的气动性能,降低了旋翼的振动和噪声水平。
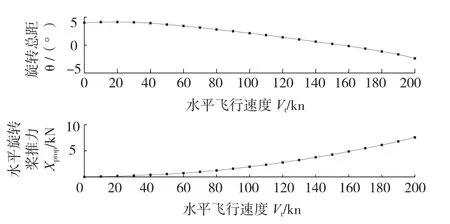
图12 K. Ferguson共轴复合式直升机过渡过程操纵Fig.12 Operation of K. Ferguson coaxial compound helicopter in transition process
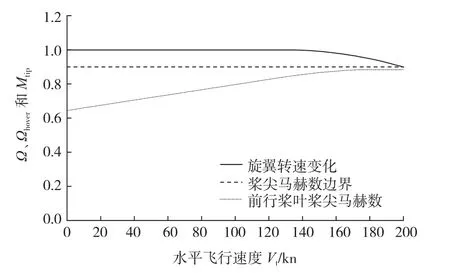
图13 旋翼转速变化Fig.13 Rotor speed variation
解决复合式直升机高速飞行的关键点之一,在于利用先进的旋翼桨叶气动外形。一是桨尖设计,能够推迟前行桨叶桨尖激波的出现,比较经典的一个实例是英国的BERP桨尖(见图14),该桨尖气动外形的特点为大后掠角和薄翼型,类似于超音速飞机的大后掠角和薄机翼,以延迟激波的产生;二是桨根设计,减小桨根部分在高速前飞时的阻力,如西科斯基X2的桨根是采用双钝头翼型(见图15),在高前进比时桨根的来流方向是从翼型的后缘吹向前缘,该翼型相对于传统的翼型能够大大减小桨根阻力。
2.6 辅助推/拉力系统的研究
常用的固定翼飞机推/拉力系统有涡喷发动机、涡扇发动机、涵道风扇和螺旋桨等。与其类似,复合式直升机的辅助推/拉力系统也包括以上几种。对于适合于复合式直升机用的辅助推/拉力系统的选择,需要综合考虑的因素包括:重量、购买和使用维护成本(包括燃油经济性和维护经济性)以及与全机其他气动部件间的气动干扰等。
涡喷发动机的优点是重量小、推重比大、体积小、易于安装布置,与机翼、旋翼等气动部件之间的相互干扰较小。但其缺点也较明显,如耗油率高、购买和使用成本高、噪音大。同时,涡喷发动机是独立于主旋翼动力系统单独加装,在悬停和低速飞行时是无用的重量,使全机总动力利用率低。因而,涡喷发动机往往只是临时用于试验初期阶段的复合式直升机。
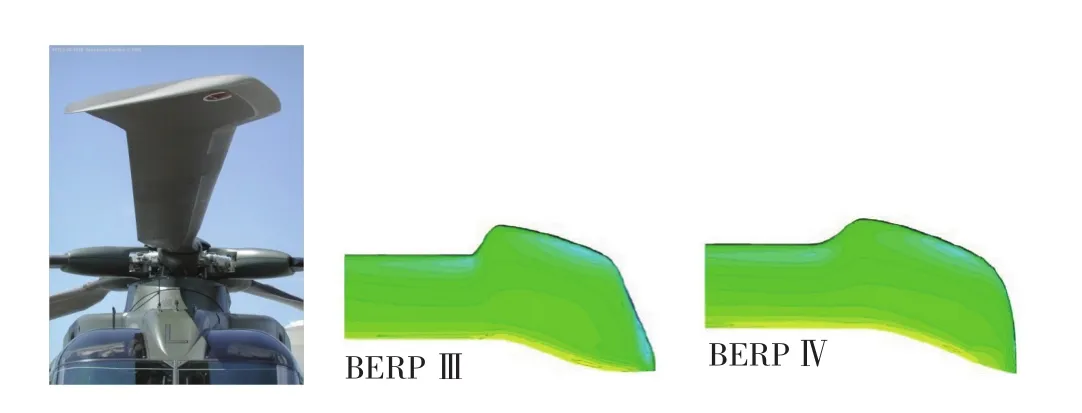
图14 EH-101直升机BERP桨尖Fig.14 BERP rotor-tip of EH-101 helicopter
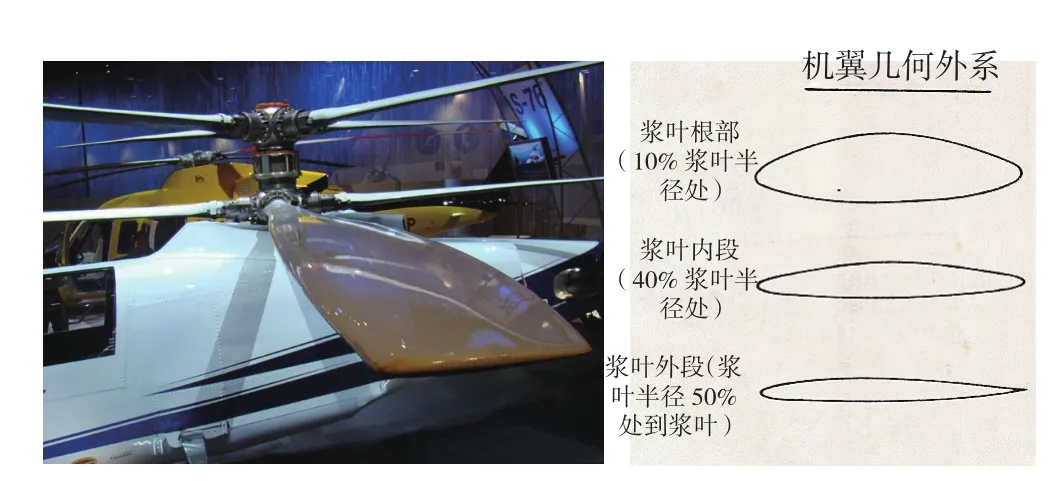
图15 西科斯基X2的翼型分布和桨叶实体外形Fig.15 Sikorsky X2 airfoil distribution and blade profile
复合式直升机的飞行状态与中低速飞行的固定翼飞机类似,而该速度段飞行的固定翼飞机大部分采用螺旋桨作为推进装置,如图16、17所示。与单旋翼直升机的尾桨类似,螺旋桨推力大小也由一套变距机构通过改变螺旋桨螺距来控制。螺旋桨的优点有中低速飞行气动效率较高、燃油经济性好、机械结构简单、重量轻、维护成本低等。另外,螺旋桨在负桨距状态时,可产生反向推力,可帮助直升机减速,大大提高了直升机的减速机动性能。同时,复合式直升机自转下滑时,螺旋桨存储的动能还可以为着陆时主旋翼瞬间增距提供能量输入。螺旋桨的缺点有:噪音稍大,容易和机翼、尾翼及主旋翼等产生气动干扰。
涵道风扇借助于涵道增加推力,保持了螺旋桨中低速飞行气动效率较高、燃油经济性好、机械结构简单、重量轻、维护成本低等优点。同时,由于有涵道的保护,它还具有噪音较小、尺寸较小的特点,同时还能对地面人员起到一定的隔离保护作用。但与螺旋桨相比,涵道增加了系统重量,同时在悬停状态增加了对旋翼下洗流的阻碍作用,在前飞时也无法避免和旋翼及机翼的相互干扰。
西科斯基X-49A“速度鹰”的矢量推力涵道螺旋桨推进器(VTDP)是在涵道风扇后,增加了升降舵、方向舵以及扇面。通过桨距变化控制推力的大小,升降舵和方向舵结合涵道风扇分别控制着俯仰和偏航力矩。扇面在悬停和低速时使气流偏转90°以平衡旋翼反扭矩,在中高速时收回到涵道内。
2.7 辅助升力系统(机翼)

图16 西科斯基X2的推力螺旋桨Fig.16 Propulsion propeller of Sikorsky X2

图/7 欧直X3的拉力螺旋桨Fig.17 Tractor propeller of Eurcopter X3
辅助升力系统(机翼)的特点是中高速飞行时升阻比大、气动效率高。当应用于复合式直升机上作为其辅助升力系统时,其主要作用是中高速飞行时为主旋翼卸载,此时主旋翼总距减小,旋翼转速也可以降低,前行桨叶激波和后行桨叶气流分离失速得以推迟。
(1)机翼垂向位置。
机翼垂向位置的布置需要考虑与主旋翼间的相互气动干扰及对全机配平的影响,还需要考虑和挥舞到极限位置的旋翼碰撞问题。研究表明,机翼与主旋翼的垂直间距越大,前飞时的主旋翼/机翼气动干扰越小。图18为洛克希德公司的AH-56A “夏延”,它采用低水平位置的机翼布置,以保持与主旋翼足够的间距;而英国Fairet航空公司“ROTODYNE”复合式旋翼机(见图19)的机翼则采用高水平位置布置,但由于旋翼位置较高,旋翼-机翼仍然保持着足够的空间。
(2)机翼升力大小控制。
随着前飞速度的变化,机翼承担的升力也不断变化,为了使旋翼和机翼的升力满足与重力的配平,需要对旋翼和机翼的升力进行操纵控制。旋翼升力的变化可通过总距操纵实现,而机翼升力的变化可通过以下方式实现:操纵升降舵控制全机俯仰姿态角以改变机翼迎角;直接改变机翼安装角;操纵襟翼等增升装置改变机翼升力大小。
操纵升降舵的方式控制全机俯仰姿态角以改变机翼迎角在操纵上容易实现,但全机俯仰角的改变也将影响桨盘前倾角,从而影响旋翼升力以及前向分力。另外也将对机身的废阻、螺旋桨的前向推力产生一定的影响。

图18 洛克希德公司的复合式直升机AH-56A“夏延”Fig.18 Lockheed AH-56 Cheyenne compound helicopter

图19 英国Fairet航空公司“ROTODYNE”复合式旋翼机Fig.19 The British Fairet Airlines “RORODYNE”compound rotorcraft
直接改变机翼安装角的方式可以更直接地控制机翼升力的大小,使其在不同的前飞速度下都能很好地配平总重力,也避免了直接操纵机身姿态角带来的其他气动部件气动力的变化。在悬停和低速前飞时,可操纵机翼安装角与机身垂直或大角度倾斜,减小机翼对旋翼下洗流的遮挡,从而提升复合式直升机的悬停效率。采用该方式的缺点是操纵力矩较大,增加了系统复杂性和额外的重量。
通过操纵襟翼的方式也可以较好地控制机翼的升力。与直接改变机翼安装角方式相比,这种方式在结构上容易实现,且重量较轻、操纵力矩小。复合式直升机的机翼一般都比较短小,襟翼面积有限,而且还需要给副翼的布置留一定的尺寸空间,因而襟翼和副翼的操纵功效均较小。通过采用襟副翼结构能同时增加襟翼和副翼的气动面积及操纵功效,而且在悬停和低速飞行时,也可通过将襟副翼下折的方式减小机翼对旋翼下洗流的阻碍作用。
(3)机翼几何尺寸。
复合式直升机机翼参数主要根据具体设计目标而定。从统计情况来看,复合式直升机机翼为中等展弦比,翼展一般在旋翼直径范围内,同时带有一定的尖削,可有效地减小悬停时的桨尖涡干扰、旋翼下洗产生的气动干扰以及前飞时的诱导阻力。
3 结论
复合式直升机目前来看依旧是一项正在发展的技术,许多关键技术仍等待着去突破。就目前技术特点来看,主旋翼的优化、气动干扰的计算、操纵策略的研究、动力系统的配置、飞行控制系统的设计等仍旧是技术难点,逐个突破终究会获得总体性能优异的复合式直升机。未来不排除有全新动力形式的开发,能量更加集中、更好控制、更少干扰,而高速直升机的发展之路永无止境。
[1] 王焕瑾,高正. 高速直升机方案研究[J].飞行力学,2005,3(1): 38-42.
WANG Huanjin, GAO Zheng. Research on the scheme of a highspeed helicopter[J]. Flight Dynamics, 2005, 3(1): 38-42.
[2] 张呈林,郭才根. 直升机总体设计[M]. 北京:国防工业出版社,2006.
ZHANG Chenglin, GUO Caigen. Helicopter conceptual design[M].Beijing: National Defense Industry Press, 2006.
[3] ORCHARD M N, NEWMAN S J. The compound helicopter versus tilt rotor: Europe’s shortcut to the future[C]//Proceedings of 26th European Rotorcraft Forum. Hague, 2000.
[4] ORCHARD M, NEWMAN S. Some design issues for the optimization of the compound helicopter configuration[C]//American Helicopter Society 56th Annual Forum. Virginia: American Helicopter Society, 2000.
[5] JOHNSON J N, BENDER G L, MCCLENNAN R D, et al. Attack helicopter evaluation AH-56A Cheyenne compound helicopter[R]. US Army Aviation System Test Activity 72-08, 1972.
[6] Jane's Information Group."Piasecki X-49 SpeedHawk (United States)"[M]// Jane's helicopter markets and systems. Coulsdon: Jane's Information Group, 2008.
[7] ORCHARD M, NEWMAN S. The fundamental configuration and design of the compound helicopter[J]. Journal of Aerospace Engineering,2003, 217(6): 297-315.
[8] JOHNSON W, YAMAUCHI G K, WATTS M E. Designs and technology requirements for civil heavy lift rotorcraft[R]. Hampton: National Aeronautics and Space Administration Ames Research Center, Moffett Field, CA and Langley Research Center, 2006.
[9] YEO H, JOHNSON W. Optimum design of a compound helicopter[J]. Journal of Aircraft, 2006, 46(4): 19.
[10] BÜHLER M. NEWMAN S J. The aerodynamics of the compound helicopter configuration[J]. The Aeronautical Journal of the Royal Aeronautical Society, 1996, 994(100): 111-120.
[11] FELKER F F, JEFFREY S L. Rotor/wing aerodynamic interactions in hover[C]// The 42nd annual forum of the AHS. Fairfax: AHS International. 1986.
[12] 万佳, 陈铭. 机翼位置对复合式直升机旋翼-机翼气动干扰的影响研究[J]. 北京航空航天大学学报, 2009, 35(5): 519-522.
WAN Jia, CHEN Ming. Influence of wing location on rotor-wing interaction of compound helicopter [J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(5): 519-522.
[13] MATHIEU A. UMD submissions to the AHS design competition[EB/OL]. [2016-03-01]. http://www.ahs.umd.edu/design.html.
[14] 孔卫红, 陈仁良. 复合式高速直升机的配平问题研究[C]//第二十四届全国直升机年会学术论文集.烟台:中国航空学会直升机分会, 2008.
KONG Weihong, CHEN Renliang. Investigation of compound helicopter trim[C]//Proceeding of the 24th national helicopter annual conference. Yantai: Chinese Aviation Society Helicopter Branch, 2008.
[15] FERGUSON K, THOMSON D. Flight dynamics investigation of compound helicopter configurations[J]. Journal of Aircraft, 2015, 52(1): 1-12.
[16] YEO H, JOHNSON W. Optimum design of a compound helicopter[J]. Journal of Aircraft, 2009, 46(4): 1210-1221.
[17] MATTHEW W F, JOHNSON W. Stability Analysis of the slowed-rotor compound helicopter configuration[J]. Submitted American Helicopter Society, 2007 , 52 (3) :239-253.
[18] 刘成. ZF-1型高速直升机初步方案设计研究[D]. 南京: 南京航空航天大学, 2012.
LIU Cheng. Research on preliminary design of ZF-1 type high-speed helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics,2012.
