V型贴片式直线超声电机的结构优化设计
2017-04-21杨模尖姚志远严晓辛
杨模尖, 姚志远, 李 响, 严晓辛
(南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)
V型贴片式直线超声电机的结构优化设计
杨模尖, 姚志远, 李 响, 严晓辛
(南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)
设计了一种一端铰支的V型直线超声电机,旨在找到一种输出效率更高、更利于小型化的定子结构。利用有限元软件分析了定子不同结构参数对模态一致性和驱动足处振幅的影响规律;基于结构参数的灵敏度的分析,对定子结构进行了优化设计。制作了45°、60°和90°三种不同角度的定子,并开展了电机机械特性的实验研究;实验结果表明,相对原有的U型电机,V型电机的模态一致性更好,输出速度和输出力有很大提高。在夹角为90°、激励电压为300 Vpp、预压力为40 N时,电机空载速度提升了66.8%,负载能力提升了55%,最大空载速度达到784 mm/s,最大输出力达到14 N,推重比达70。研究表明:夹持元件与定子一体化设计和一端铰支的夹持方式简化了电机的结构,有利于直线超声电机的小型化;V型定子夹角为90°时,综合输出性能及稳定性更好。
直线超声电机;结构优化设计;有限元分析;模态一致性;小型化设计
直线超声电机(Linear Ultrasonic Motor, LUSM)作为超声电机的一个分支,是20世纪80年代发展起来的种新型微特电机。其原理是利用压电元件的逆压电效应和弹性体的超声振动,并通过动定子之间的摩擦作用,把定子的微幅振动转换成动子的直线运动[1-2]。直线超声电机由于其结构简单、紧凑、推重比大、断电自锁、不受磁场干扰、低噪声运行、可直接输出力和直线运动、位移分辨率高、结构设计灵活、可采用多种多样的形状实现装置的小型化和轻量化等优点,使得其在工程上具有重要的应用价值和广阔的应用前景,已成为国内外超声电机的研究热点[3-5]。
自20世纪70年代VISHNEVSKY等[6]提出直线超声电机定、动子接触的椭圆轨迹驱动原理以来,国内外对直线超声电机的研究获得了很大的进展,研制出了各种结构的直线型超声电机。直线超声电机分为贴片式电机和夹心式电机[7],小型直线超声电机结构多为贴片式[8-9],最小贴片式直线超声电机尺寸仅10 mm以内,推力0.4 N,其他如日本、德国等皆有应用类似微小型直线超声电机的报道[10-13]。
目前,国内对贴片式微型直线超声电机的研究不多,且大都是以单一的结构设计和对其输出特性研究为主,缺乏对此类电机特定结构和其参数对电机性能影响规律的研究。同时,由于贴片式微小型直线超声电机在稳定性、输出力等方面尚有不足,造成它在国内仍几乎无实际应用。基于以上问题,本文以U型贴片式直线超声电机[14]为基础,设计了一种新的直线超声电机。该电机的定子为V型结构,采用一端铰支的夹持形式。利用有限元软件对定子结构进行了优化设计。实验结果表明,所设计的电机的输出力和速度此有很大的提高,有利于小型化,具有很好的应用前景。
1 定子结构优化设计
1.1 定子结构
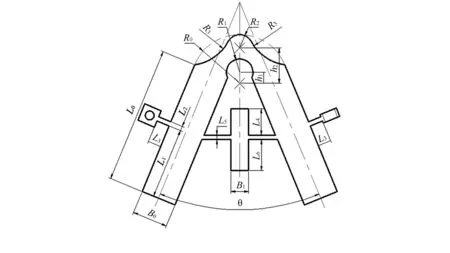
图1所示为U型直线超声电机定子,该定子由两个相互平行的梁结构和一个拱形梁组成,其中两梁是主体结构,它通过拱形梁连接在一起。在工作中,两平行梁激发出具有一定相位差的纵向振动和弯曲振动,最后在拱梁中间耦合成具有驱动作用的椭圆轨迹。但是,因拱形梁的存在,容易导致定子的两相振动(对称模态和反对称模态)频率不一致。为了改善两相振动模态频率的一致性,提出了V型直线超声电机。该电机的定子将上述U型电机的平行振子设计成具有一定角度的V型结构,同时将拱形梁缩减为具有一定柔性的驱动足结构。在夹持方面,相对柔性圆弧式夹持电机,梁式夹持电机具有更好的输出性能[15],所以这里将定子设计成一端铰支、另一端为自由端的铰支梁(板)结构。这种结构有利于简化预压力的施加方式:在自由端通过弹簧施加作用力,利用杠杆原理达到施加预压力的效果。该定子结构省去了诸如滑槽、夹持框等用于施加预压力的装置,从而有利于直线电机的小型化。另外,针对电机在工作中定子驱动足处会出现上下翘起的情况,在振子节点处(与夹持同位置处)设计一块支撑板。V型直线超声电机的定子结构如图2所示。
其中:D为定子厚度;振子上L0×B0区域为陶瓷片贴片位置;B0为振子宽度;L1为夹持与振子端部距离;L2为夹持厚度;L3为柔性夹持长度;L4、L6为支撑板长度;L5为两振子链接板厚度;B1为支撑板宽度;R0、R1、R2和R3为定子驱动足处的四段圆弧,其中R0圆弧与两振子相切,R2圆弧与R3圆弧相切,R1圆弧与R0圆弧的圆心距离为h1,R2圆弧与R0圆弧的圆心距离为h2;θ为两振子间所成角度,设计范围为30°~90°。
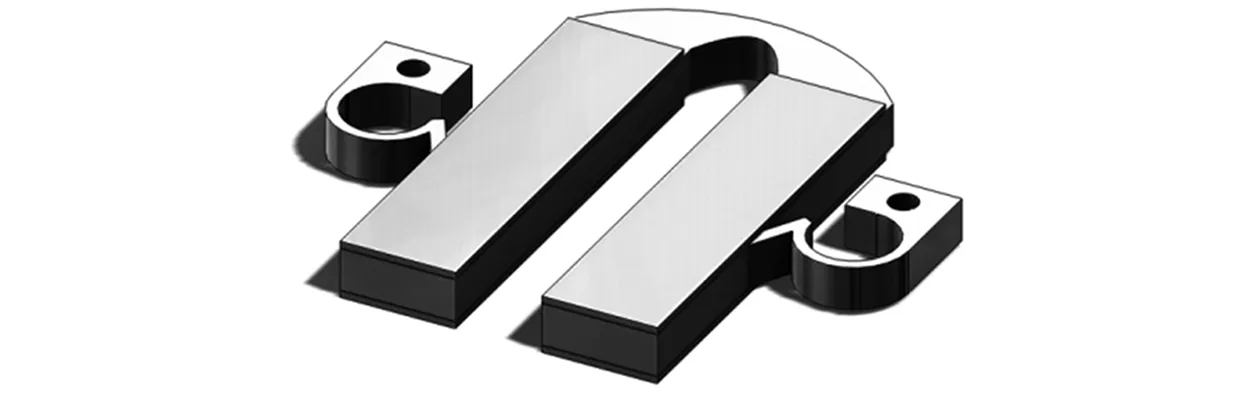
图1 U型直线超声电机定子Fig.1 The stator of U-shape linear ultrasonic motor
(a) 结构
(b) 外形
1.2 结构参数的灵敏度分析
直线超声电机定子结构设计的基本方法是通过结构的模态分析,研究定子两相模态的一致性。利用AnsysWorkbench15.0软件进行有限元分析,研究定子的结构参数对两相模态振动频率差的影响规律。
影响两相模态振动频率差的结构参数有许多,依据设计要求和以往设计经验,取定已知或对两相模态振动频率影响较小的结构参数,不作为分析变量,如表1所示。定子其余结构参数视为变量参数,取值范围如表2所示。

表1 取定的定子结构参数
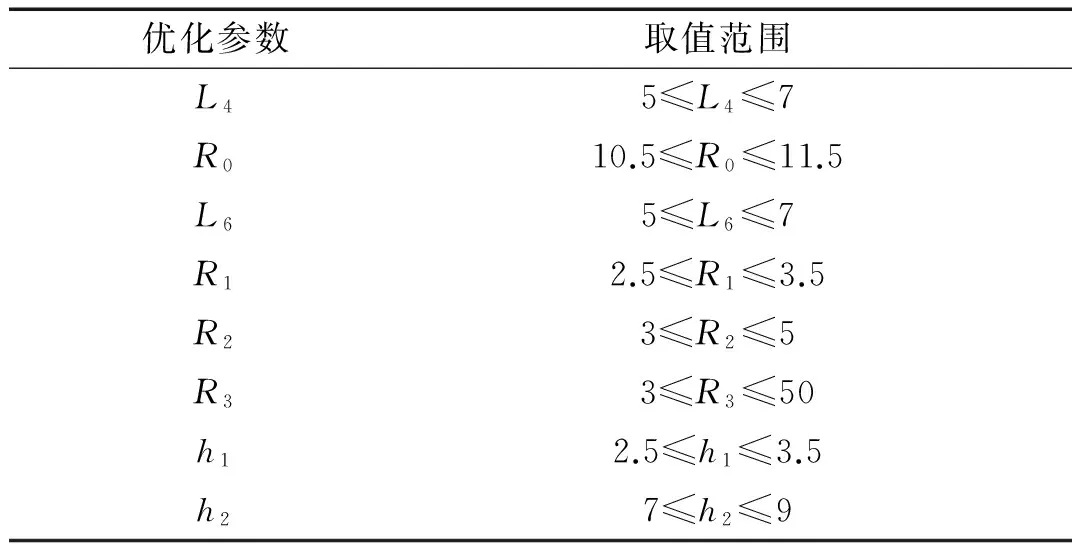
表2 变量参数取值范围
有限元分析过程中,定义定子弹性体材料为QBe2,陶瓷片材料为PZT8;完全固定约束夹持的两端面;网格为自由划分,最大网格尺寸为1 mm。不失一般性,随机选取一组参数作为定子优化的初始结构参
数,通过控制变量的方法对其各个参数进行分析。如图3出示了45° V型定子的一组结构参数与工作模态振动频率绝对差值Δf的关系。
从图3可知,在给定取值范围中,结构参数R0、R2对Δf影响最大,为最灵敏参数。从图3(a)可知,在R0=10.6 mm附近,Δf可取得最小值,但是,由于R0尺寸的变化直接改变两振子总体长度,会降低对U型和V型其他角度下的对比性,因此这里不作为设计变量,即不作为粗调参数,取R0=11 mm。从图3(c)可知,在R2=4.2 mm附近, Δf也可以取得最小值,但是,R2圆弧表面与摩擦条相接触,半径越大,在磨损相同深度下驱动足与摩擦条的接触面积会越来越大,对电机运行的稳定性影响很大[18-20],因此这里R2也不作为粗调参数,取R2=3 mm。
从图3(b)、图3(g)、图3(h)可知,结构参数R3、h1和h2对Δf影响较大,为灵敏参数,可作为粗调参数。
从图3(d)、图3(e)、图3(f)可知,结构参数R3、L4和L6对Δf影响较小,为不敏感参数,可作为微调参数。另外,L4和L6是支撑板的长度,为使支撑板能起到很好的防翘作用,L4和L6长度可取整为6 mm。
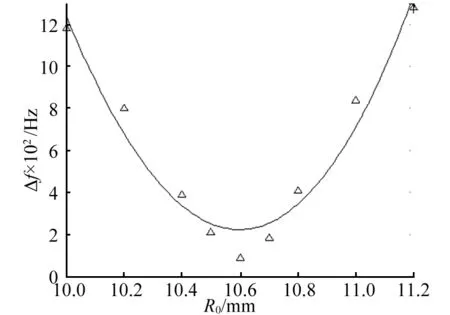
(a) Δf与R0参数关系曲线
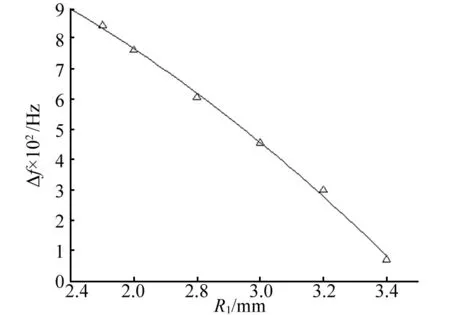
(b)Δf与R1参数关系曲线
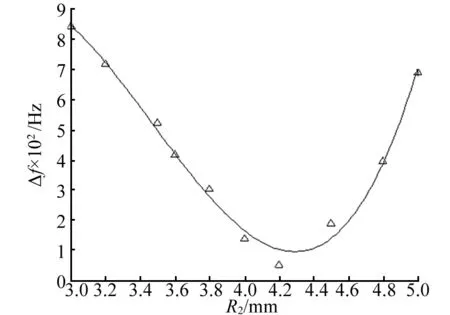
(c)Δf与R2参数关系曲线
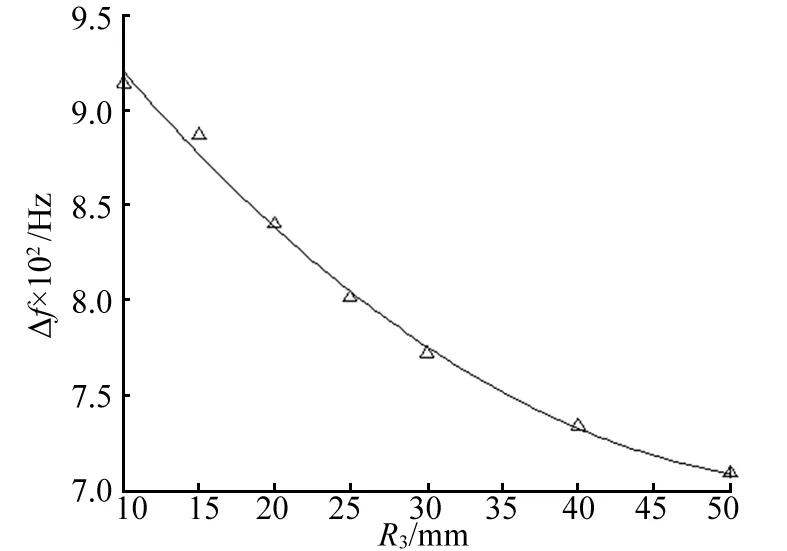
(d)Δf与R3参数关系曲线
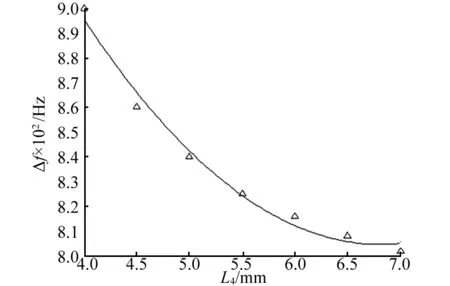
(e)Δf与L4参数关系曲线
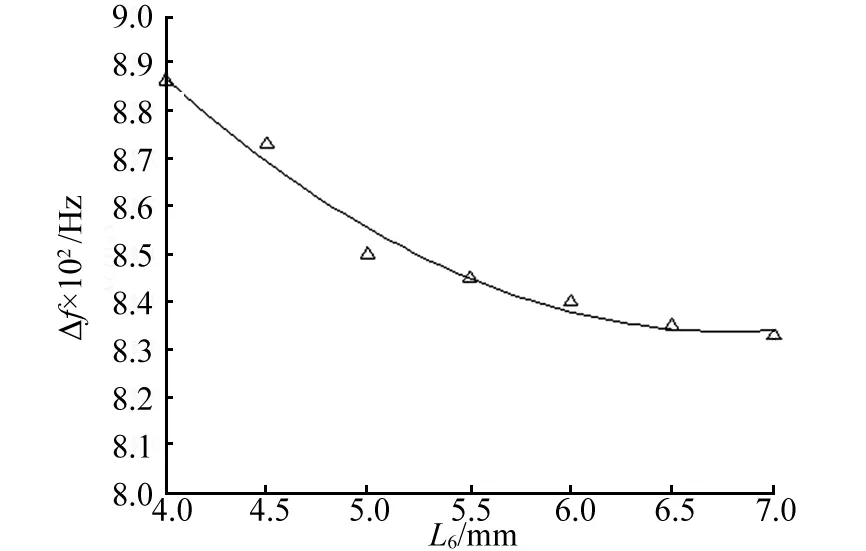
(f)Δf与L6参数关系曲线
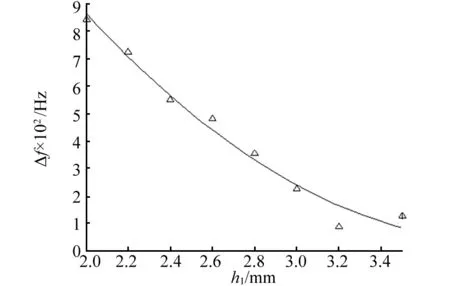
(g)Δf与h1参数关系曲线
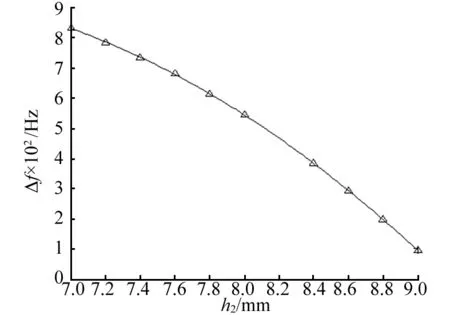
(h)Δf与h2参数关系曲线
1.3 结构参数的优化设计
依据“1.2”节分析,在整个V型定子结构中,最终优化结构参数可归结为4个,分别为R1、R3、h1和h2。表3、表4为一组夹角45°的V型定子的优化前后结构参数和工作频率。图4为该定子的模态分析。

表3 V45定子的一组优化前后结构参数

表4 V45定子的一组优化前后的工作频率
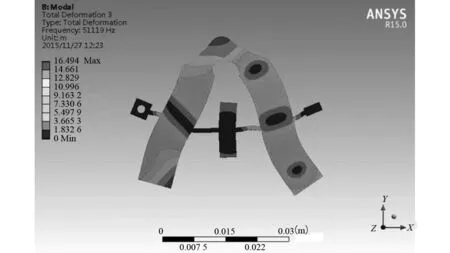
(a) 在频率f1下定子的振动模态
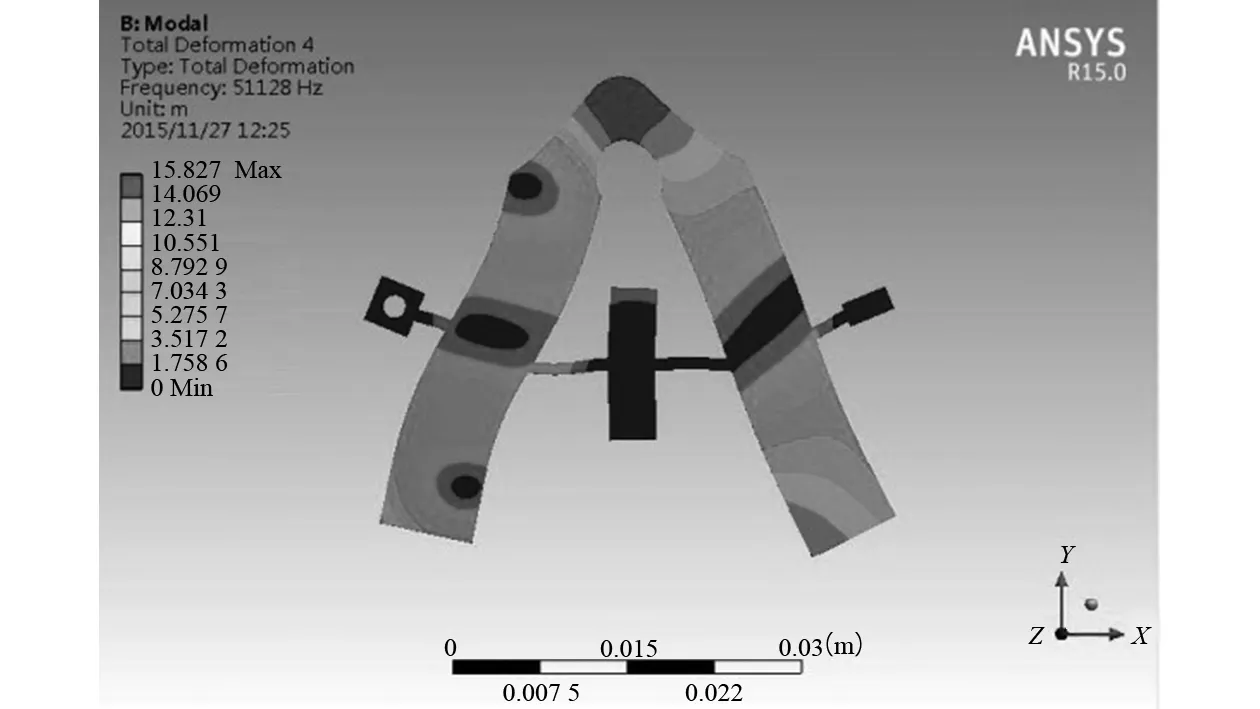
(b) 在频率f2下定子的振动模态
模态分析表明,V型定子的两振子间的夹角对定子的两相模态会产生影响,其工作模态振动频率较U型定子远离干扰模态振动频率,更有利于定子头部形成具有驱动作用的椭圆运动。
1.4 定子驱动足振幅的分析
定子两相工作模态的频率一致性仅仅是电机正常运行的必要条件,影响其输出性能的决定因素还取决于定子驱动足处椭圆运动轨迹的形态和振幅大小。
表5所示为谐响应分析得到的不同角度下定子驱动足处的椭圆运动轨迹的形态和振幅大小(模态一致性比较好的情形下)。由表5可知,随着两振子夹角的增大,椭圆运动轨迹的长轴呈现由小变大趋势,短轴呈现由大变小的趋势。夹角为时,长轴和短轴接近,定子驱动足处的椭圆轨迹比较接近一个正圆,电机的输出力和输出速度等综合性能会比较好。
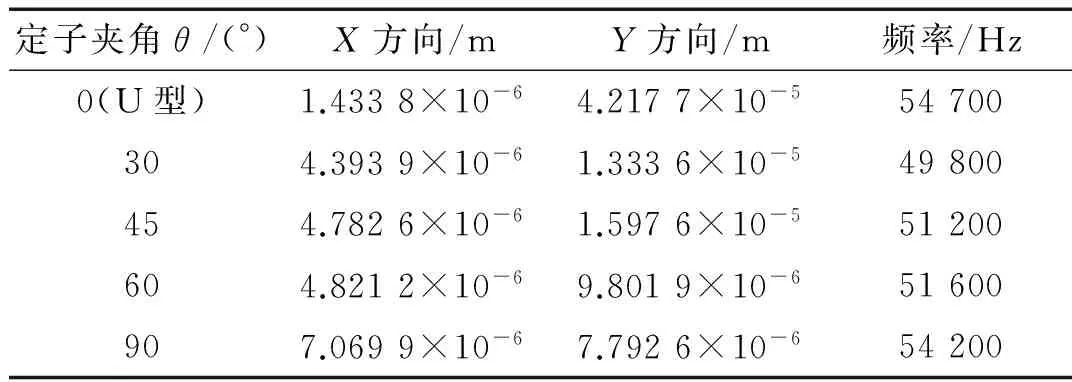
表5 不同角度定子驱动足处的振幅
2 实验研究
2.1 定子的装夹
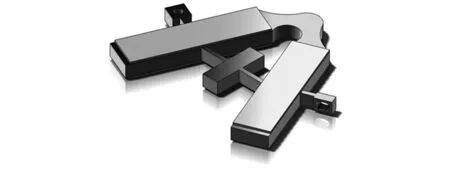
图 5为所设计的一端铰支夹持的直线超声电机。定子的安装方式如下:定子左端通过螺栓铰支在一个小底座上,小底座固定在底板上,预压力弹簧作用在定子右端,定子绕左端转动使定子驱动足压紧直线导轨的滑块,从而达到施加预压力效果。其中右端的调节螺栓起引导弹簧(保证了弹簧施力的方向)和调节预压力大小的作用。
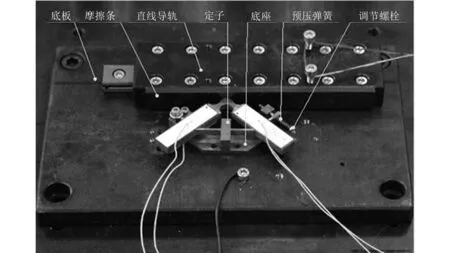
图5 定子的装夹Fig.5 Clamping of the stator
相比传统方式,该装置去掉了滑槽装置,大大降低了加工成本,同时消除了滑槽装置带来的间隙和摩擦,定子的拆卸和安装更加方便。另一方面,调节调节螺栓就可以调整定子与摩擦条之间预压力的大小,施加预压力更方便。这种装夹方式更加有利于直线超声电机的小型化。
2.2 定子模态实验
利用PSV-300F-B 型多普勒激光测振系统测试了定子的振动模态。图6所示为激励电压80 Vpp下定子的模态特性图。它表明,定子实际扫频频率与仿真频率较为接近;定子共振频率附近几乎没有出现干扰频率,定子的模态一致性非常好。
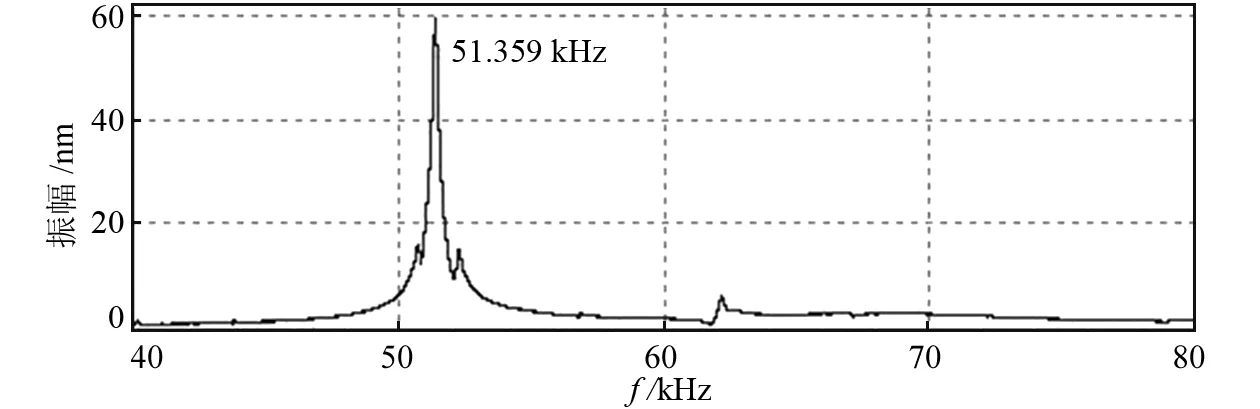
(a) V45
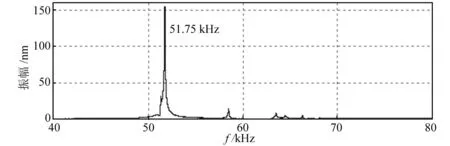
(b) V60
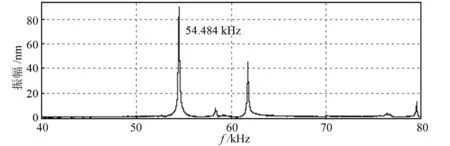
(c) V90
2.3 机械输出特性实验
图7所示为定子实物图和实验装置。实验装置由驱动平台和测试平台两部分组成:电机驱动平台由一台信号发生器和两台功率放大器组成;测试平台由电机、直线导轨(导轨滑块重190 g,行程70 mm)、负载、激光位移传感器以及测试系统组成。电机驱动滑块左右运动,通过激光位移传感器可以获得滑块的位移、速度和加速度。
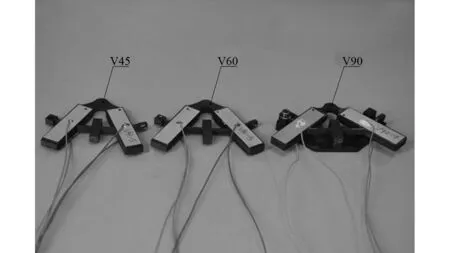
(a) 定子实物图

(b) 实验装置
图8所示为45°、60°和90°三种不同角度的V型电机的特性曲线。其中图8(a)、图8(b)、图8(c)为三种电机在不同预压力下的机械特性曲线,通过三幅图的对比表明:
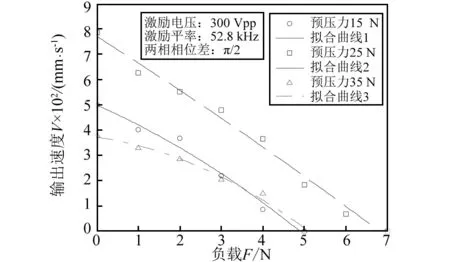
(a)V45电机不同预压力下的机械特性
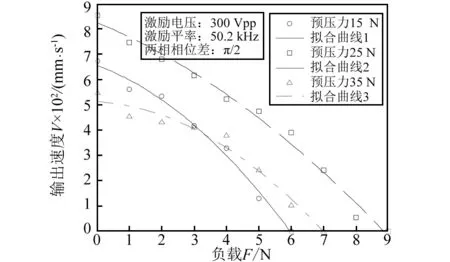
(b)V60电机不同预压力下的机械特性
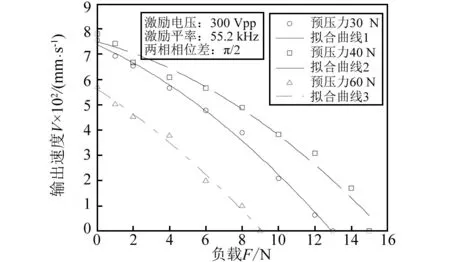
(c)V90电机不同预压力下的机械特性
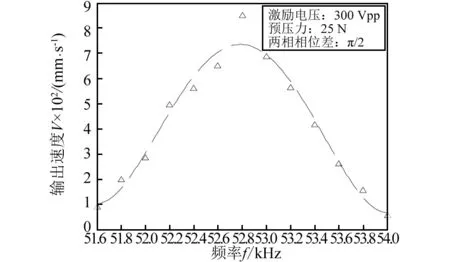
(d)V45电机速度频率特性
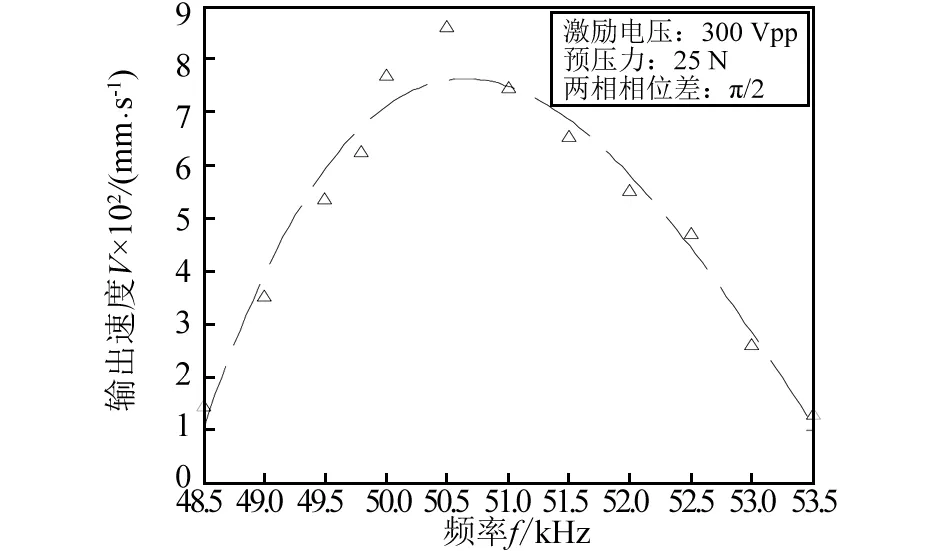
(e)V60电机速度频率特性
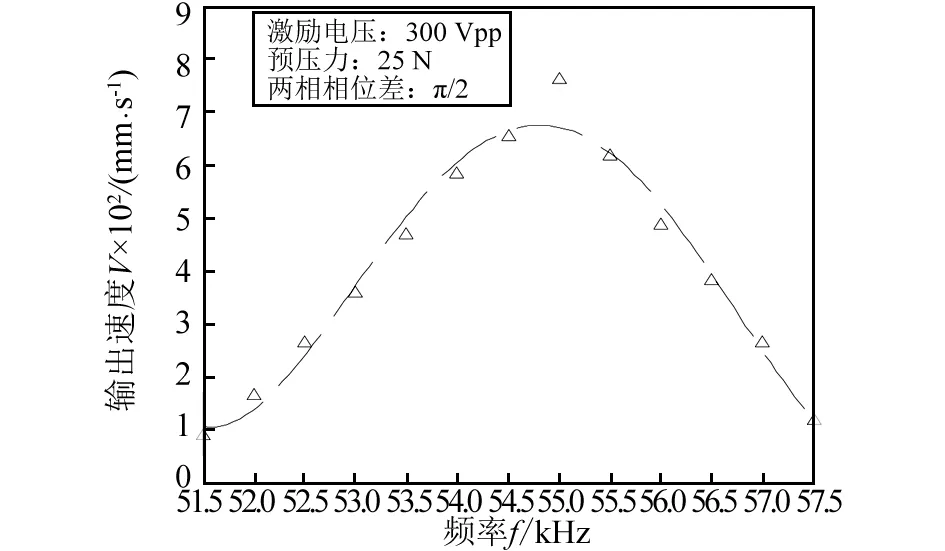
(f)V90电机速度频率特
(1)三种电机的最大空载速度变化不是很明显,但是电机的负载能力随着定子角度θ的增大而明显提升,在定子夹角为90°、预压力40 N、电压300 Vpp时,空载速度可达784 mm/s,最大负载可达14 N。相比苏松飞等设计的U型电机在400 Vpp电压下的最大空载速度470 mm/s、最大推力9 N,V型电机空载速度提升了66.8 %,负载能力提升了55%,推重比达70。
(2)在不同预压力(较小、最佳、过大)下,三电机的负载能力和速度变化很明显,它们的负载能力随着预压力的增大先增大后减小,但是,V90电机可施加的预压力更大。
(3)电机的速度随着负载的增大而逐渐减小,预压力合适的情形下,负载能力和速度趋于抛物线关系。
图8中(d)、图8(e)、图8(f)为三种电机在其输出性能比较好的条件下的速度频率特性曲线。显然,在其工作频率范围内,三电机的速度频率特性曲线类似于正态分布,速度随着频率的增大先增大后减小;三幅图的对比表明,定子的夹角θ一定程度上影响电机的工作频率的频宽,频宽随夹角θ的增大有所增大,夹角为90°时,频宽最大,电机的可调性更好。
3 结 论
首先,在U型贴片式直线超声电机定子结构的基础上,衍生出一种V型贴片式直线超声电机定子结构。提出了一种基于铰支梁(板)结构的夹持方式,从夹持一体化设计和预压力施加方式两方面大大简化了定子的装夹装置,更有利于直线超声电机的小型化。
然后,利用有限元软件分析了V型定子的关键结构尺寸对两相工作模态频率一致性的影响,筛选出了对频率一致性影响较敏感的结构参数,为电机的结构设计提供了一定的理论指导。
最后,制作了不同角度下V型直线超声电机的样机,并对样机进行了频率测试、机械输出特性相关实验研究。实验表明:
(1) 相对于U型贴片式直线超声电机,该V型贴片式直线超声电机运行更加稳定,输出速度更大,负载能力更强。
(2) 夹角θ(30°≤θ≤90°)对定子的频宽有一定的影响。频宽随夹角θ的增大有所增大,夹角为90°时,频宽最大,电机的可调性更好。
(3) 电机负载能力随着V型定子夹角θ增大逐渐增大,在夹角为90°时,电机运行更加稳定,综合输出性能更好。
[ 1 ] WALLASEHEK J. Ultrasonic motor research in Germany-past, present, future[C]∥ Proceedings of the First International Workshop on Ultrasonic motors and Actuators. Yokohama: Tokyo Institute of Technology, 2005.
[ 2 ] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[ 3 ] 黄国庆,刘群亭,黄卫清,等.直线型超声电机研究的现状[J].微特电机,2003,31(2):24-26. HUANG Guoqing,LIU Qunting,HUANG Weiqing,et al. Recent advances in linear ultrasonic motor[J].Small & Special Electrical Machines,2003,31(2):24-26.
[ 4 ] 朱华,陈超,赵淳生.行波型杆式超声电机的动力学分析与性能仿真[J]. 振动与冲击, 2008, 27(6):103-107. ZHU Hua,CHEN Chao,ZHAO Chunsheng.Dynamic analysis and performance simulation of a traveling wave type and rod shape ultrasonic motor[J]. Journal of Vibration and Shock, 2008, 27(6):103-107.
[ 5 ] 郭吉丰,白洋,王剑.多自由度超声波电机的研究进展和展望[J]. 振动与冲击, 2013, 32(15):65-68. GUO Jifeng,BAI Yang,WANG Jian.Recengt development an prospect of multi-degree-of-freedom ultrasonic motors[J].Journal of Vibration and Shock, 2013, 32(15):65-68.
[ 6 ] VISHNEVSKY V, GULTIAEVA L, KARTASCHEW I, et al.Piezoelectric Motor. Russian Patent CCCP:851560[P]. 1976-1981.
[ 7 ] 胡正旭.小型直线超声电机柔性夹持优化设计[D]. 南京:南京航空航天大学,2014.
[ 8 ] VASILJEV P. Actuator of type a shaking beam[C]∥Proceedings of the 7th International Conference on New Actuators 2002.Bremen:Messe Bremen Gmbh, 2002:493-496.
[ 9 ] HEMSEL T, MRACEK M, VASELIJEV P, et al. A novel approach for high power ultrasonic motors[C]∥2004 IEEE International ultrasonics, Ferroelectrics, and Frequency Control. Montreal:IEEE,2004:1161-1164.
[10] HEMSEL T, WALLASCHEK J. Survey of present state of the art of piezoelectric linear motors [J]. Ultrasonics, 2000, 38(1-8):37-40.
[11] ROH Y,KWON J.Development of a new standing wave type ultrasonic linear motor[J].Sensors and Actuators,2004,112(2/3):196-202.
[12] PARK J S,KIM S T,KIM J W,et al. Ultrasonic linear motor using L1-B4 mode and its analysis[J].Japanese Journal of Applied Physics,2005,44(1A):412-416.
[13] YUN C H,ISHII T,NAKAMURA K,et al.A high power ultrasonic linear motor using a longitudinal and bending hybrid bolt-clamped langevin type transducer[J].Japanese Journal of Applied Physics,2001,40(5B):3773-3776.
[14] 苏松飞,姚志远,耿冉冉,等.U形直线超声电机结构设计[J].哈尔滨工程大学学报,2012,33(6): 759-763. SU Songfei,YAO Zhiyuan,GENG Ranran,et al.Structure design of a linear ultrasonic motor with a U-shaped vibrator[J].Journal of Harbin Engineering University,2012,33(6): 759-763.
[15] 简月,姚志远,杨模尖,等.V型直线超声电机梁式夹持的结构设计[J].光学精密工程,2015,23(5):1358-1364.JIAN Yue,YAO Zhiyuan,YANG Mojian, et al. Structure design of beam type clamp for V-shape ultrasonic motor[J]. Optics & Precision Engineering, 2015, 23(5): 1358-1364.
[16] 杨东,姚志远.双变幅杆V形直线超声电机研究[J].压电与声光,2009,31(5):685-687. YANG Dong, YAO Zhiyuan. Research on V-shape linear ultrasonic motor based on amplitude amplifier pole[J]. Piezoelectrics & Acoustooptics, 2009,31(5):685-687.
[17] 焦阳,姚志远,胡正旭. U型直线超声波电动机的小型化结构设计[C]∥第十六届中国小电机技术研讨会论文摘要集. 上海:中国微特电机与组件分会,2011.
[18] 周胜利,姚志远.直线超声电机定/动子接触的微观力学模型[J]. 振动与冲击, 2012, 31(20):90-93. ZHOU Shengli,YAO Zhiyuan. Micromechanic model for contact between a linear ultrasonic motor’s stator and mover[J]. 2012, 31(20):90-93.
[19] YAMAGUCHI T, ADACHI K, ISHIMINE Y, et al. Wear mode control of drive tip of ultrasonic motor for precision positioning[J]. Wear, 2004, 256: 145-152.
[20] ADACHI K, MATSUDA Y. Effect of environment on drive properties positioning stage driven by ultrasonic motor[C]∥ Synopsis of international tribology Conference, 2005:176.
Structural optimization design of V-shape patch type linear ultrasonic motors
YANG Mojian, YAO Zhiyuan, LI Xiang, YAN Xiaoxin
(State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China)
Here, an one-end hinged V-shape linear ultrasonic motor was designed to find a stator structure with a better output efficiency and being more suitable for miniaturization. First of all, using a finite element software, the influences of parameters of the stator structure on modal consistency and amplitudes at the driving foot were analyzed. The optimization design for the stator structure was conducted based on the sensitivity analysis of structural parameters. Then, three motors using stators with different angles 45°, 60° and 90°, respectively were fabricated, and Tests for mechanical characteristics of the motors were performed. Test results indicated that compared with the original U-shape motor, the modal consistency of the V-shape motor is better, and the output speed and out put force are greatly improved; when the angle is 90°, the excitation voltage is 300 Vpp, and the preload is 40 N, the motor’s no-load speed rises by 66.8% and its load capacity rises by 55%, the maximum no-load speed reaches 784 mm/s, the maximum out put force reaches 14 N, and the thrust weight ratio is 70. The study showed that the integrated design of clamped elements and stator and the one-end hinged clamping mode can simplify the motor structure, and be suitable for the miniaturization of linear ultrasonic motors; when the V-shape stator angle is 90°, the performance of comprehensive output and the stability of the motor are better.
linear ultrasonic motor; optimum structural design; finite element analysis; modal consistency; miniaturization design
国家自然科学基金资助项目(51275229); 国家重大仪器设备开发专项(2012YQ100225)
2015-08-19 修改稿收到日期:2016-03-03
杨模尖 男,硕士生,1987年生
姚志远 男,博士,教授,博士生导师,1961年生
TM359.4;TB559
A
10.13465/j.cnki.jvs.2017.07.032
