基于运行速度下互通式立交分流区识别视距分析
2017-04-16李国春
李国春
(辽宁省交通规划设计院有限责任公司,辽宁 沈阳 110166)
基于运行速度下互通式立交分流区识别视距分析
李国春
(辽宁省交通规划设计院有限责任公司,辽宁 沈阳 110166)
基于运行速度理论,通过分析驾驶员驶入互通式立交区的驾驶行为建立识别视距的计算模型,计算得出不同主线设计速度对应的不同匝道设计速度的识别视距。
运行速度;互通立交;识别视距;
1 概述
美国的相关统计[1]研究表明,互通式立交分流区的交通事故占互通式立交区的44%。而我国某高速公路事故统计也表明,出口匝道发生的事故数占互通式立交及服务区的事故总数的38.85%,这些事故主要为碰撞固定物、尾随相撞、侧翻,占分流区事故总数的92.40%。分析事故原因主要因为该路段的交通运行状态打破了高速公路主线的稳定流状态,车辆行驶速度、运动轨迹的离散性高,车辆紧急刹车、紧急变道的概率远高于其他路段,交通冲突明显。因此提供给驾驶员发现出口并从容驾驶的操作时间也应相对较长。
识别视距为驾驶人从发现并识别前方障碍物或方向改变到避让障碍物或调整操作所需要的距离。识别视距是保证高速公路运营安全的一项非常重要的指标。该距离决定着驾驶员能否在视觉混乱的道路环境中,依据道路提供信息判断出潜在危险、决策出满足安全行驶速度及选择合理的行驶路线。足够的识别视距可以保证行车安全,提高通行效率。
2 识别视距模型的建立
2.1 国外相关规定
美国规范[2][3]中判断视距与我国识别视距定义较为相似。美国 《公路与城市道路几何设计》中认为,在复杂混乱的道路环境中,驾驶员能够发现危险,并做出正确判断,合理安全地通过该区域所需要的汽车行驶距离则为判断视距。美国 《公路与城市道路几何设计》给出判断视距计算公式如公式(1)所示:

式中:d为判断视距(m);v为主线运行速度(km/h);t1为操作时间(s);amax为制动加速度(m/s2)。
从上式可以看出,判断视距的影响因素主要是驾驶者处理各种信息的反应时间及制动减速度。
2.2 识别视距计算模型
分析驾驶员驶入互通式立交区的驾驶行为及相关资料,识别视距可分解为认读距离、判断距离、行动距离、安全距离(如图1)。识别视距计算见公式(2)。
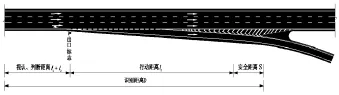
图1 识别视距过程分析

式中:D为识别视距(m);l1为视认距离(m);l2为判断距离(m);l3为行动距离(m);s为安全距离(m),取5~10m。
2.2.1 标志标线视认距离
驾驶员驶入互通式立交分流区域获取道路信息的途径是通过视觉对前方标志的认读。根据标志认读时间实验可知,驾驶员对出口标志中的文字感知、阅读、理解、反应是需要一定时间的。
在认读过程中,驾驶员还未对认读信息作出动作处理,此过程还未采取相应的减速行为,在该过程中计算车辆行驶速度应以主线的运行速度为准。认读距离为:

式中:l1为视认距离(m);v为主线运行速度(km/h);t1为认读时间(s),取3s。
2.2.2 判断距离
驾驶员通过视觉收集到的道路信息需要驾驶员进行相应的判断分析,在这个过程中驾驶员的神经系统将处理道路信息,并将这些信息传递给肢体运动器官,做出符合驾驶员出行目的的驾驶操作。
在此过程中,部分驾驶员将变换至内侧车道高速通过互通式立交区,部分驾驶员则要准备向右侧变换车道,降低行驶速度后驶入互通式立交出口。因此判断过程中产生的距离主要是因驾驶员处理信息的反应时间下车辆行驶的距离,此过程并未产生减速效应,计算行驶速度为主线的运行速度,即可得到判断距离:

式中:l2为判断距离(m);v为主线运行速度(km/h);t2为标志判断时间(s),为2.0s。
2.2.3 行动距离
驾驶员在完成驾驶方向的判断之后,将进行减速制动,使得车辆在主线上的行驶速度将至可安全通过匝道的速度。减速行驶的时间包括驾驶员的反应时间和车辆减速时间。整个减速过程中汽车驶过的距离为:

式中:l3为行动距离(m);v为主线设计速度(km/h);v匝为匝道分流鼻处运行速度(km/h);t3为驾驶员的反应时间(s),取0.6s;amax为制动加速度。制动减速是以 “基本舒适”为前提的,我国的汽车驾驶员手册中的建议值为1.5~2.0m/ s2,本文取1.8m/s2。
3 运行速度的选取
3.1 互通立交区主线运行速度
由于高速公路互通立交区主线圆曲线最小半径为1100m(一般值)[4][5],因此,按照运行速度理论可按直线路段对待。在考虑国内典型高速公路调查结果的同时借鉴美国和日本的相关资料,本文研究确定的互通立交区主线运行速度值如表1所示。
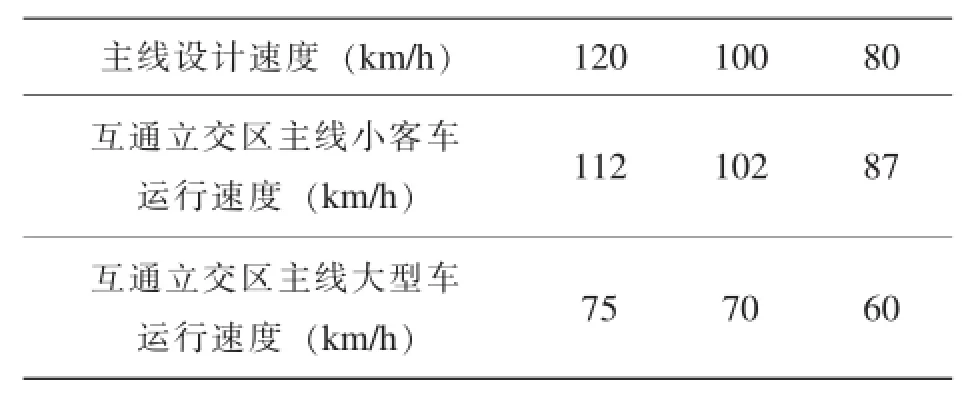
表1 互通立交区主线运行速度
3.2 匝道分流鼻处运行速度
通过实测国内典型多车道高速公路17处分流鼻处速度(5处枢纽立交,匝道设计速度均为60km/h;12处一般互通立交,其匝道设计速度均为 40km/h),其平均速度如图 2、3、4所示。
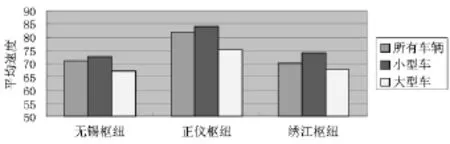
图2 某高速公路典型互通立交分流鼻处运行速度(匝道设计速度60km/h)
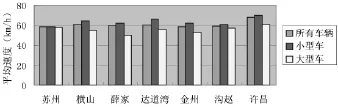
图3 某高速公路典型互通立交分流鼻处运行速度(匝道设计速度40km/h)
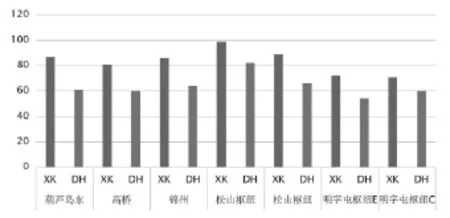
图4 京哈高速典型立交出口分流鼻端运行速度
调查发现,匝道设计速度 40km/h以及60km/h所对应的分流鼻处速度都较设计速度高,这一方面是因为驾驶员由高速行驶降速时有偏向高速行驶的倾向,另一方面是因为匝道设计速度是匝道指标较小路段所能保证的最大安全速度。《规范》[4][5]明确规定, 匝道的圆曲线半径应不小于表2的规定值;同时匝道设计应改变以往在确定匝道各部位的形态要素时笼统地以一个固定的设计速度作为设计控制的不正确做法;减速车道的线形尽量要与主线保持一致;在分流鼻处,匝道平曲线的最小曲率半径规定如表3所示。
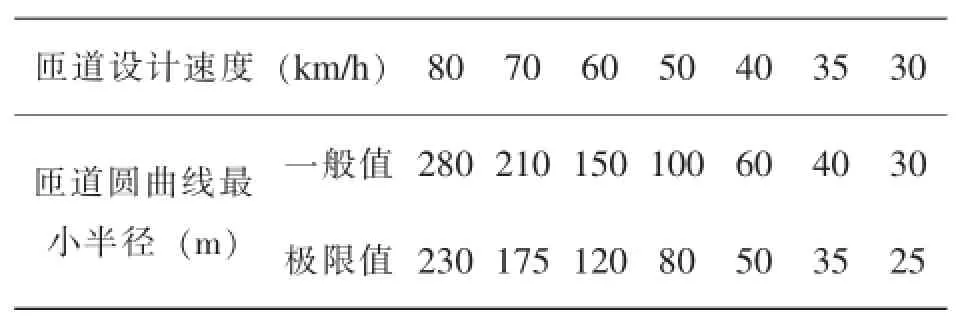
表2 匝道圆曲线最小半径
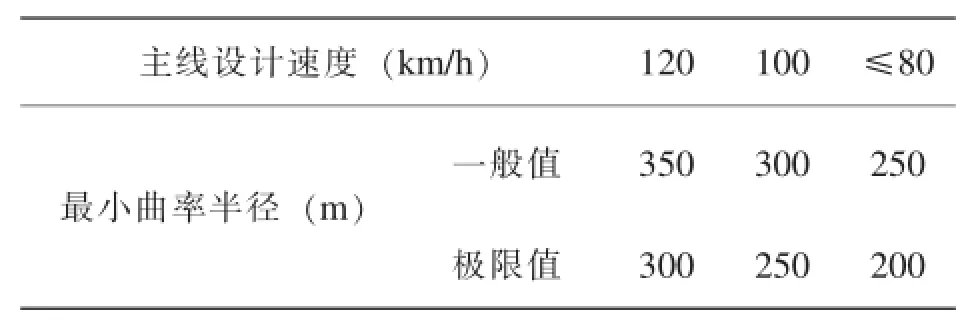
表3 分流鼻处匝道平曲线的最小曲率半径
通过分析表2和3不难发现,主线设计速度≤80km/h所对应的分流鼻处匝道平曲线极限最小半径基本上可以满足匝道设计速度为70km/h的匝道圆曲线最小半径一般值,匝道驶出道口处路线的几何线性条件比匝道中间路段要好,设计速度比匝道中间路段设计速度要高,所以在分流鼻端处运行速度较大是正常现象,这是为了分流车辆安全的 “宽容”设计。
美国减速车道分流鼻速度取值见表4,结合实测速度数据及美国的取值,本文取值如表5所示。
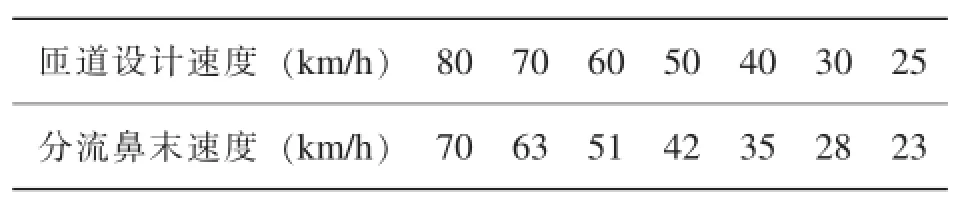
表4 美国匝道设计车速与分流鼻速度对应表
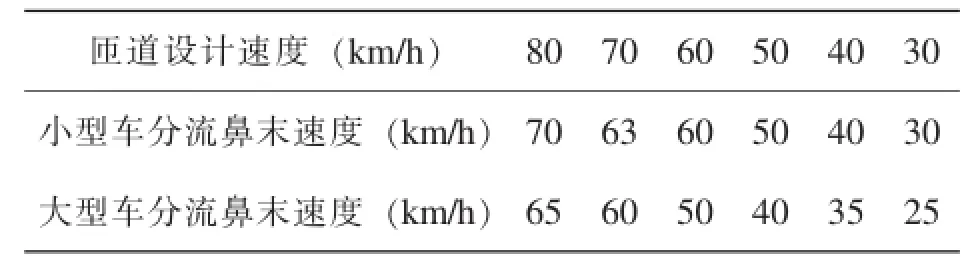
表5 匝道设计车速与分流鼻速度对应表
4 识别视距
根据识别视距的计算模型及主线、匝道分流鼻的运行速度,可得到不同设计速度的主线与匝道相对应的识别视距值(表6、表7)。
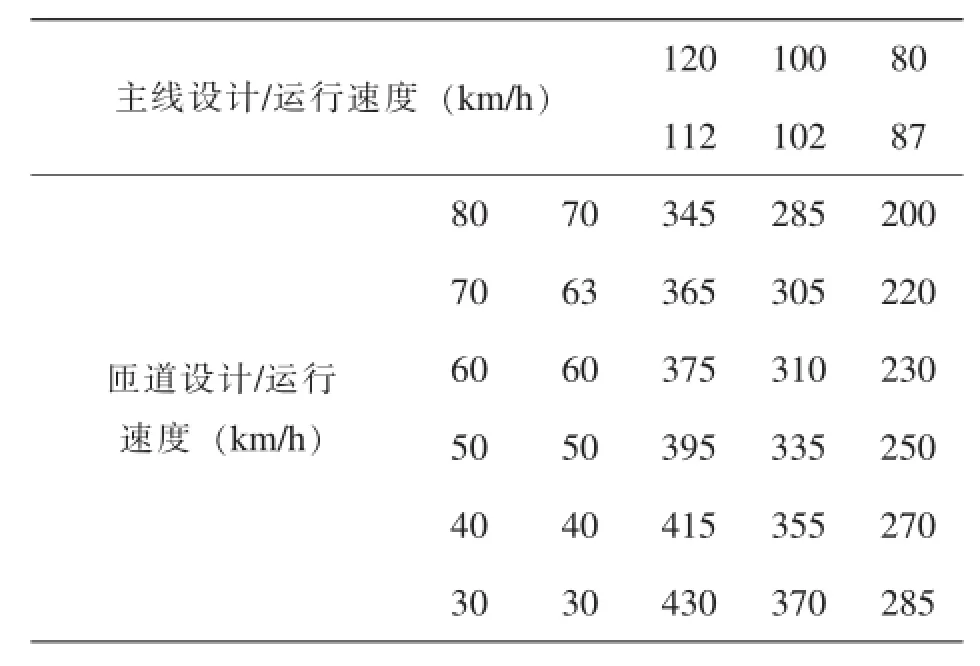
表6 小型车立交出口识别视距计算值(m)
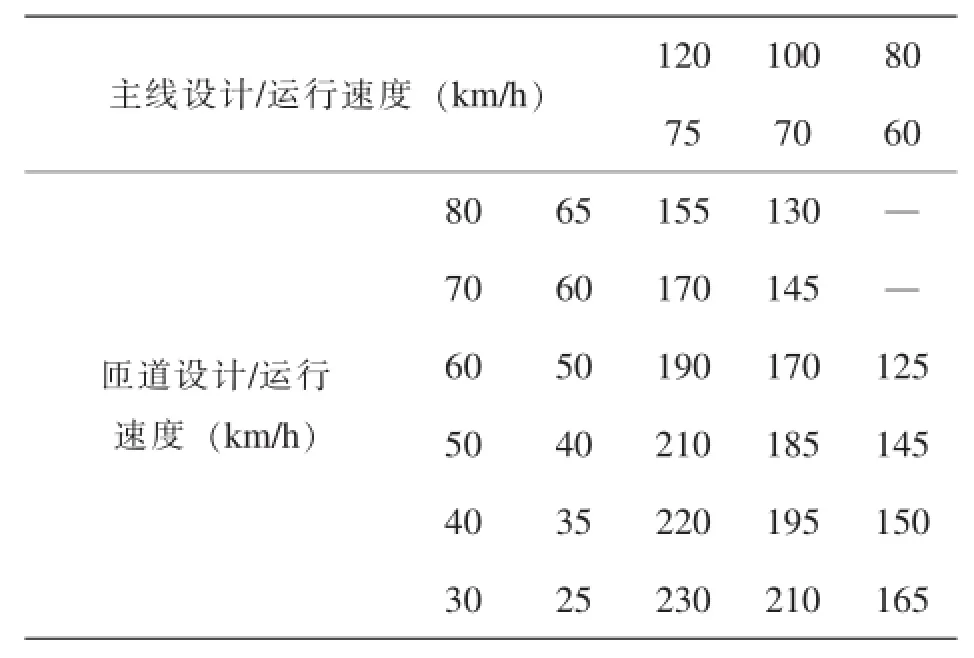
表7 大型车立交出口识别视距计算值 (m)
5 结语
考虑到大型车所需要的识别视距小于小型车的识别视距,且大型车目视点高,司机视野好,本文推荐的识别视距采用小型车辆所计算数值,对应的识别视距详见下表8。
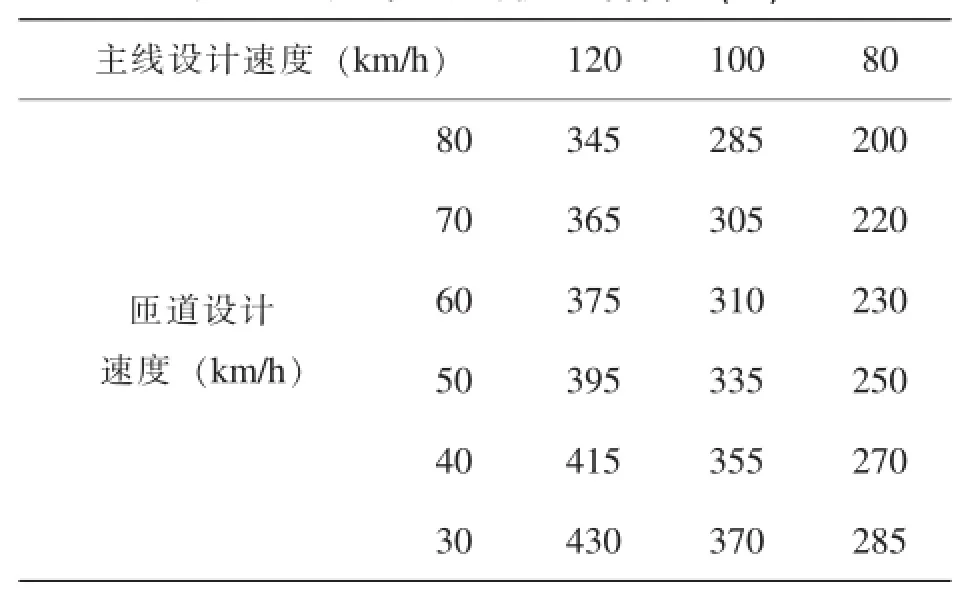
表8 立交出口识别视距计算值(m)
通过对比,上表推荐采用的识别视距数值与现行规范推荐数值基本一致,但本文针对于不用匝道设计速度提出了不同的识别视距要求,在实际设计中具有一定的指导意义。
[1]伊轩轩,潘晓东.基于交通心理学的高架下匝道衔接路段安全改善措施研究 [J].道路交通与安全,2009(04):58-63.
[2]Highway Capacity Manuals.(HCM).“Weaving segments.”[R]TRB Special Rep.No.209,Transportation Research Board, Washington,D.C.2000.
[3]American Association of State Freeway and Transportation Officials(AASHTO).A Policy on Geometric Design of Freeway and Streets,Washington.D.C.2011.
[4]中华人民共和国交通部.公路路线设计规范:JTG D20-2006[S].北京:人民交通出版社,2006.
[5]中华人民共和国交通运输部.公路立体交叉设计细则:JTG/ T D21-2014[S].北京:人民交通出版社,2014.
[6]刘亚非,杨少伟,潘兵宏.基于交通心理学的高速公路出口匝道事故成因研究 [J].公路.2011.11(11):104-108.
[7]张伯明.交通标志汉字视认性的研究 [J].公路交通科技. 1993,10(2):40-46.
[8]沈强儒,赵一,陈璋勇,等:高速公路互通式立交约束型出口识别视距分析 [J].中外公路.2012.12(6):305-307.
Recognition Distance Analysis in Diverge of Interchange Based on Operating Speed
LI Guo-chun
Based on the theory of operating speed,the calculating model of recognizing the line-of-sight is established by analyzing the driving behavior of the driver entering the interchanges.The line-of-sight of the different design speeds of different ramp designs is calculated.
operating speed,interchange,recognition distance
U412.35
A
1008-3812(2017)01-005-04
2017-01-10
李国春(1979— ),男,天津宝坻人,高级工程师。研究方向:公路工程。
