基于GPS与惯性组件的复合测姿系统设计
2017-04-14韩学帅郝永平
韩学帅,王 磊,郝永平
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
基于GPS与惯性组件的复合测姿系统设计
韩学帅,王 磊,郝永平
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
针对微小型载体空间有限而无法安装大型测姿系统,提出了一种低成本的微型复合测姿方案.复合测姿系统由单天线GPS和MEMS惯性组件构成.利用扩展卡尔曼滤波将单天线GPS和MEMS惯性组件信息融合,提高了姿态估计精度.室外车载实验结果表明,利用该复合测姿系统解算的滚角和俯仰角误差可控制在1°以内,航向角误差可控制在2°以内.
单天线GPS;MEMS惯性组件;姿态估计;车载实验
随着微型无人机、机器人的高速发展,低成本、小体积、高精度的微型测姿系统迫切需要研制.目前,微型测姿系统的研究重点是对GPS输出信息和微惯性组件陀螺仪、加速度计及磁力计的输出信息进行数据融合.利用GPS及惯性器件确定载体姿态的精度越来越高,已经达到了工程实用的要求.文献[1]研究了在GPS信号较好的环境下利用双天线GPS求解载体的航向角,并采用自适应无迹卡尔曼滤波器对航向角进行最优估计,误差不超过1°.文献[3]提出了基于四元数的扩展卡尔曼滤波方法,状态方程中的四元数微分方程用陀螺仪的输出作为系数,而观测方程采用磁力计的输出模型.
然而,多天线GPS系统接收天线延迟,噪声相互独立;运算量大,实时性难以保证;要求天线安装时中心严格处于一个水平面上,安装在微型飞行器、机器人上存在较大困难.传统的纯惯性测姿系统误差随时间累积,而且其尺寸较大,无法安装在微型载体上.
本文针对微小型载体的结构特点,提出了一种基于扩展卡尔曼滤波器的单天线GPS与微惯性组件的复合姿态算法,将微惯性器件的信息与单天线GPS提供的载体速度信息融合,以提高姿态角的解算精度.该方法的优点在于:只采用单天线GPS系统,可以安装在空间受限制的微小型载体炮弹、无人机等之上;利用成本低廉的微惯性组件辅助单天线GPS测姿,可节约成本.
1 姿态表达式
本文所采用的导航坐标系(n系)为北东地坐标系,载体坐标系(b系)的原点为载体质心,xb沿载体的纵轴向前,yb沿载体的横轴向右,zb与xb、yb符合右手螺旋定则.
力学中常用欧拉角确定动坐标系相对于参考坐标系的角位置关系.载体的横滚角(φ)、俯仰角(θ)和航向角(ψ)实际上是一组欧拉角.这组欧拉角描述了载体坐标系相对于导航坐标系的角位置关系.更新姿态的算法有多种,如四元数法、方向余弦法、欧拉角法等.每种算法均有不足之处.四元数法只适用于低动态载体;方向余弦法计算量大,实时性较差;在俯仰角接近±90°时,欧拉角法会出现退化现象,但适用于水平姿态变化不大的载体.因此,本文采用欧拉角法来确定载体姿态.

(1)
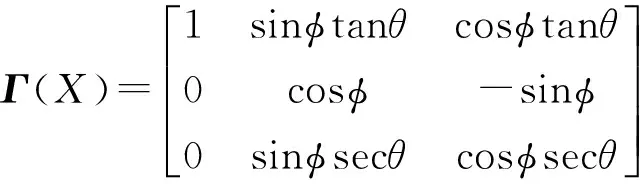
欧拉角微分方程为:
(2)
2 复合测姿算法
2.1 传感器模型
微惯性器件可用来提供姿态估计所需要的原始信息,其性能优劣决定了测姿系统的精度和性能.设计和制造工艺等会造成传感器的精度误差,为了对其误差进行实时补偿,需要进行误差建模.
2.1.1 陀螺仪输出模型
陀螺仪是载体角速度的测量器件,对测姿系统的精度有直接影响.陀螺仪的误差主要体现为零偏漂移.零偏漂移为随机误差.陀螺仪零偏漂移误差可模型化为:
ωm=ωt+b+ηω
(3)
式中:ωm=[ωmxωmyωmz]T为实际的陀螺仪输出值;ωt=[ωtxωtyωtz]T为真实的角速度值;b=[bxbybz]为时变的陀螺仪零偏漂移误差,由于b很小,可认为b≈0;ηω为高斯白噪声.
2.1.2 加速度计输出模型

(4)
(5)
在惯性坐标系下,由刚体动力学方程可得:
(6)


(7)
(8)
式中,Δt为GPS的数据采样周期.
2.1.3 磁力计输出模型
(9)
(10)
式中:B为地磁场向量模值;I为地磁倾角;D为地磁偏角.
2.2 扩展卡尔曼滤波器的设计
扩展卡尔曼滤波作为一种最重要的数据融合方法,已经被广泛应用于各个领域.本文通过EKF滤波器对陀螺仪、加速度计、磁力计和单天线GPS的数据进行融合,以提高测量精度,获得更加准确的姿态信息.
2.2.1 状态方程
系统的状态向量x由3个姿态角及陀螺仪零偏组成,即:
x=[φθψbxbybz]T
(11)
系统的状态方程为:
(12)
式中:
2.2.2 观测方程
当GPS正常工作且载体近似直线运动时,观测方程为:
(13)

当GPS无法工作或载体作曲线运动时,观测方程可改为:
(14)
式中,ψGM为基于互补滤波器融合陀螺仪和磁力计信息解算出的航向角,作为滤波器中的观测量[4-5].ψGM的解算式为:
ψGM(t)=(1-α1)ψGM(t-T)+α1ψM(t)+α2ψG(t)
(15)
3 车载实验
3.1 硬件设计
在实验室中自主开发了一款MEMS IMU.该MEMS IMU包括3个相互正交的陀螺仪、加速度计和磁力计,以及与它们安装在一起的温度传感器.
自主研发的导航样机由MEMS IMU惯性测量单元、地磁测量模块、卫星接收模块、现场可编程门阵列核心板(FPGA)、数字信号处理器(DSP)、电源模块、接口电路板组成.通过精密机械构件将它们布置在数据采集板上(图1).

图1 导航系统样机
将一个6层DSP/FPGA微控制器和一个4层PCB与所有的MEMS传感器整合在一起.相关的复合测姿算法被嵌入DSP中,并行的总线接口用于DSP和FPGA之间的数据通信.
考虑到微小型航姿系统有限的尺寸、空间和载荷,MEMS陀螺仪和加速度计均选用某公司的小体积中等精度产品.MEMS磁阻传感器选用某国外公司生产的三轴磁阻式传感器产品.DSP控制器选用TI(德州仪器)公司产品,FPGA选用Altera公司产品.
复合测姿系统中的高动态接收机由国内某公司生产,具有基本定位功能,可提供基本的定位精度和测速精度,适用于高速运转平台.此产品具有体积小、功耗低、动态适应性强、抗干扰能力强、抗过载能力强、工作稳定性和可靠性高等特点.根据GPS接收机数据通信协议,将GPS数据利用串口发送到上位机,并通过自主开发的VC数据采集界面对导航数据进行存储.
3.2 软件设计
根据复合测姿系统软件的特点,将软件划分为初始化模块、初始对准模块、MEMS惯性测量单元与GPS数据采集模块、载体路线判定模块、微惯性器件误差补偿模块、GPS导出载体动力加速度解算模块、数据融合滤波模块及姿态信息输出模块等.在CCS开发环境下对复合测姿算法进行C程序编写,并对各个模块程序进行调试,以保证各个模块良好的功能.复合测姿算法的流程如图2所示.
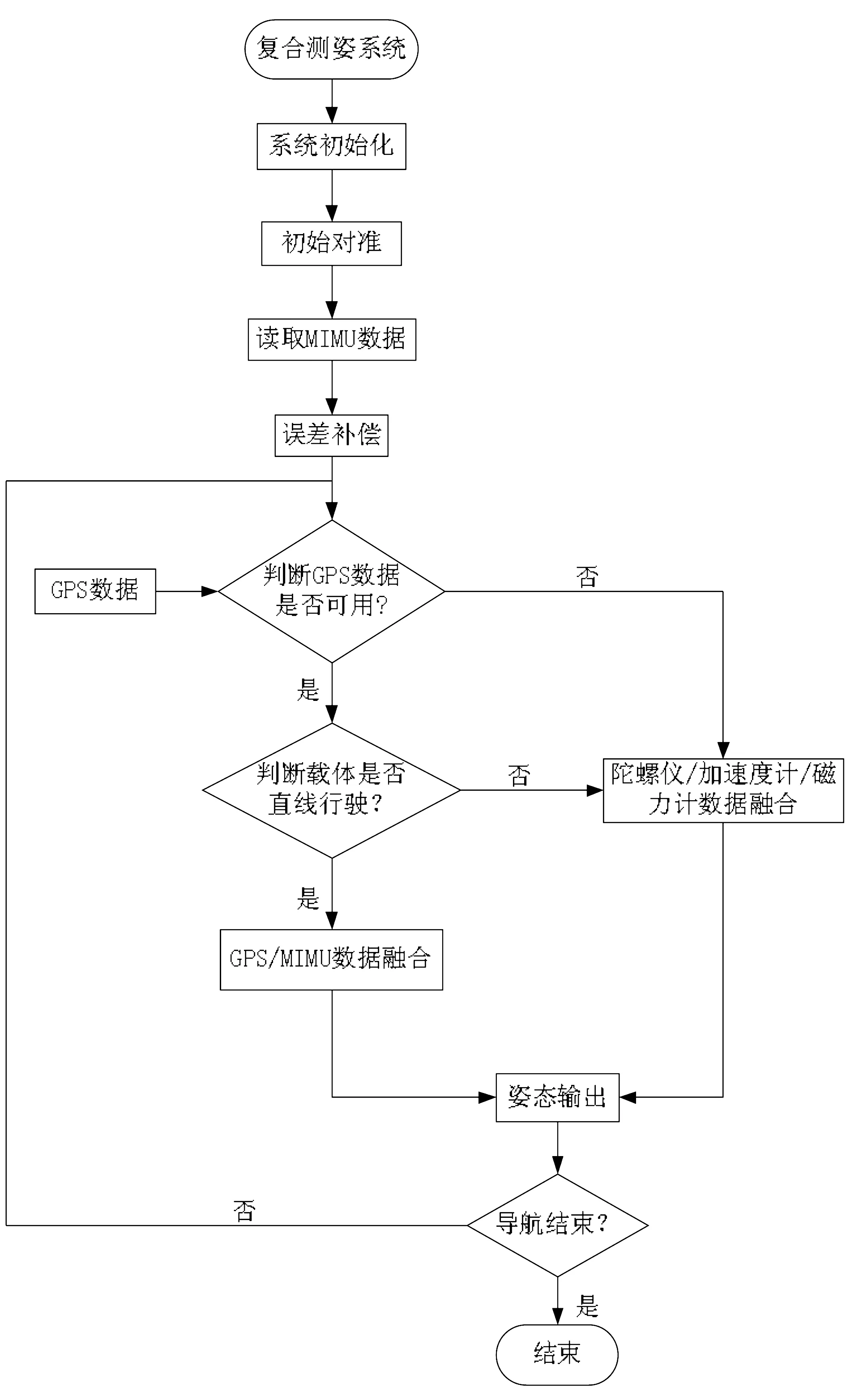
图2 复合测姿算法流程
3.3 实验结果分析
实验采用Xsens公司生产的姿态参考系统MTi为参考对象.MTi是一款微小型姿态航向参考系统,采样频率为100 Hz,通过RS232与PC机串口通讯.跑车的路线包括直线段和曲线段,跑车时间为100 s.
各姿态角的误差曲线如图3-图5所示.

图3 横滚角误差曲线
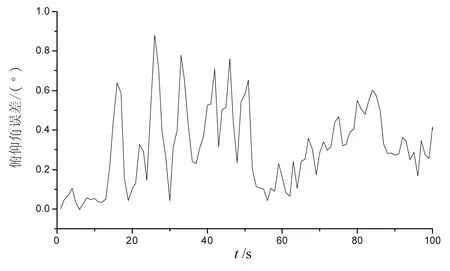
图4 俯仰角误差曲线

图5 航向角误差曲线
在100 s的室外车载实验中,横滚角与俯仰角误差可控制在1°左右.在25 s左右,跑车在弯道行驶,速度较小,加速度噪声较大.在80 s左右,跑车减速行驶,速度足够小,也会产生较大的加速度噪声.上述两种情况会导致横滚角误差和俯仰角误差出现较大波动.而在其他时间段,跑车近乎直线行驶,且速度足够大,加速度噪声较小,因此相应的横滚角与俯仰角的误差较小.
在100 s的车载实验中,航向角误差可控制在2°左右.跑车在18~25 s的曲线段时,惯性器件误差累积而导致航向角误差偏大.在其他时间段,跑车接近直线行驶,侧滑角近似为零,在此状态下利用伪姿态算法解算出来的航向姿态误差较小.
分析可知,利用单天线GPS/MEMS惯性器件复合测姿系统解算出来的姿态角,与真实的姿态角之间的误差较小,基本可以满足工程要求.
4 结束语
本文提出的基于扩展卡尔曼滤波器的单天线GPS与MEMS惯性器件复合姿态测量方法,极大地提高了微小型导航系统的测姿精度.车载实验验证了该复合测姿法的有效性,横滚角和俯仰角误差都可控制在1°以内,航向角误差在2°以内.
[1] Wu Z, Yao M, Ma H,et al.Low-cost Antenna attitude estimation by fusing inertial sensing and two-antenna GPS for vehicle-mounted satcom-on-the-move[J]. IEEE Transactions on Vehicular Technology,2013,62(3):1084-1096.
[2] 盛汉林,张天宏,刘冬冬.基于扩展卡尔曼滤波器的低成本航姿系统设计[J].系统工程与电子技术,2013,35(10):2158-2164.
[3] 姬振龙,钱 锋.基于MTI的组合导航算法研究[J].弹箭与制导学报,2010,30(4):11-14.
[4] 丁 军,赵忠华. AHRS 航姿解算中的两种滤波方法的比较研究[J].计算机仿真,2013,30(9):60-65.
[5] Wu Z M,Sun Z G,Zhang W Z,et al.A novel approach for attitude estimation based on MEMS inertial sensors using nonlinear complementary filters[J].IEEE Sensors Journal,2016,16(10): 3856-3864.
Design of Compound Attitude Determination SystemBased on GPS and Inertial Sensors
HAN Xue-shuai,WANG Lei,HAO Yong-ping
(School of Mechanical Engineering,Shenyang Ligong University,Shenyang 110159,China)
Focusing on the issues of limit space of micro-carrier and large-sized attitude measurement system can not be installed etc, this paper presents a low-cost micro-composite attitude measurement program. The composite attitude measurement system consists of single antenna GPS and MEMS inertial sensors, and the information of GPS and MEMS inertial sensors are fused by using extended Kalman filter to improve the accuracy of attitude calculation. Finally, an outdoor vehicle experiment was carried out and the experimental results show that the roll angle and pitch angle error can be controlled within 1 ° and the heading angle error can be controlled at about 2 ° by using the complex attitude measurement system.
single antenna GPS system;MEMS inertial sensors;attitude determination;experimental research
2016-11-23
韩学帅(1989-),男,辽宁鞍山人,硕士研究生,研究方向为现代机电装备及自动化技术.
1006-3269(2017)01-0034-05
F0303
A
10.3969/j.issn.1006-3269.2017.01.008