量子导航定位系统中的捕获和粗跟踪技术*
2017-04-14汪海伦邹紫盛尚伟伟
丛 爽,汪海伦,邹紫盛,尚伟伟,隋 岩
(1.中国科学技术大学自动化系,合肥230027; 2.北京卫星信息工程研究所,天地一体化信息技术国家重点实验室,北京100086)
量子导航定位系统中的捕获和粗跟踪技术*
丛 爽1,汪海伦1,邹紫盛1,尚伟伟1,隋 岩2
(1.中国科学技术大学自动化系,合肥230027; 2.北京卫星信息工程研究所,天地一体化信息技术国家重点实验室,北京100086)
量子导航定位系统需要借助于空间量子卫星信息通信系统来进行信号的捕获、跟踪和对准(acquisition,tracking and pointing,ATP).ATP系统是空间量子卫星信息通信的重要组成部分,涉及到量子通信链路的建立以及中断通信链路的恢复;粗跟踪和精跟踪的相互配合,可以确保通信双方处于通信状态,达到期望的信号跟踪性能.本文详细阐述用于量子导航定位系统的空间量子卫星通信的捕获阶段和粗跟踪的相关技术,重点分析捕获阶段中的初始指向技术、扫描技术、捕获阶段的精度及其性能,以及粗跟踪阶段的精度及其性能指标等关键技术.
捕获;粗跟踪;量子导航;扫描
0 引言
捕获、跟踪和对准(acquisition,tracking and pointing,ATP)系统是空间量子卫星信息通信的重要组成部分,用来快速建立量子通信链路或者恢复中断的通信链路;粗跟踪和精跟踪的相互配合,可以确保通信双方处于通信状态.量子导航定位系统也是借助于空间量子卫星信息通信系统来进行信号的捕获、跟踪和对准,所以需要对空间量子卫星信息通信系统中的ATP技术进行研究.ATP系统的捕获过程是根据星历表轨道预报或GPS坐标计算得到地面光学望远镜的方位角和俯仰角,然后驱动望远镜转动对准信标光,实施捕捉动作,完成捕获过程.粗跟踪过程是在通信双方相互完成捕获过程的基础上,根据接收到的信标光方向不断调整自身的光轴,在相对运动中维持光链路的对准.空间量子通信的捕获工作和粗跟踪工作都是由粗跟踪系统完成,其中,光学天线作为粗跟踪系统中的一个重要组成部分[1].在空间量子通信的捕获过程中,当接收方和主动方之间的光学天线的范围角变化很大时,需要ATP系统中的粗跟踪系统控制光学天线转动来使通讯链路双方准确指向对方位置[2].
由于空间量子通信具有通信距离远、通信光束狭窄的特点,实际应用中对有效载荷的体积、重量和功耗要求十分苛刻,所以高精度、高带宽的ATP技术成为空间量子通信的一个关键技术[3].在空间量子通讯系统中,需要采用ATP技术来建立并维持量子光通信链路.捕获是指在双方开始通信前,地面用户端(主动方)发送信标光,使空间量子卫星端(接收方)探测到该信标光,作为构建通信链路的引导;跟踪是指将对方的信标光通过跟踪装置引导到跟踪探测器的中心位置,确保接收光路的对准;对准是指量子光准确的照准对方,并保持量子光的高精度指向稳定[4].空间ATP技术的难点在于高对准精度、高稳定性两方面的要求.常见的星载ATP系统有二维转台结构、二维摆镜结构和潜望镜结构.其中,二维转台结构兼具运动范围大和跟踪精度高的优点.
美国从20世纪60年代就开始了星地大气光传输的研究.1968年,JPL实验室在地面和轨道高度为1 250 km的 GEOS-II卫星之间进行了波长为488 nm的上行激光传输实验.1976年,NASA利用轨道高度为1 000 km的GEOS-III卫星进行了地-空-地的星地激光传输实验.该实验中的GEOS-III上装有反射器阵列,光学天线口径为760 mm[5].1998年至2000年,JPL实验室利用口径为600 mm的光学天线、TMF地面站和光学通讯演示(OCD)系统进行了46.8 km的地面远距离激光链路实验,光信号波长先后设置为844 nm和852 nm,捕获时间大于100 s,精跟踪精度为2 μrad[6].
欧空局从1985年开始实施SILEX计划来研究和验证有关星地和星间激光通信的相关技术.在低轨道卫星方面,SILEX终端的ATP系统选用孔径为180 mm的望远镜作为光学天线、L型经纬仪结构的步进电机作为粗跟踪执行机构、电荷耦合器件(CCD)作为粗、精跟踪探测器,可以获得±160 mrad的粗跟踪范围、±180°的粗跟踪方位角和±90°的粗跟踪俯仰角、0.02°的粗跟踪系统误差和0.02°的粗跟踪随机误差.在星地通信中的指向精度为3.5 mrad,捕获时间约为240 s[6],经过精跟踪和超前瞄准阶段最终可以达到±1 μrad的精跟踪精度[5].
日本从20世纪80年代末开展的技术测试卫星(ETS-VI)计划目的是进行星地之间的空间对地光通信实验.ETS-VI计划具体为GEO轨道卫星并搭载有效载荷激光通讯设备(laser communication equipment,LCE),采用了口径为75 mm的收发共用光学天线,粗跟踪万向节采用移动线圈驱动的双轴反射镜形式,粗跟踪探测器是用面阵CCD探测器,精跟踪和超前瞄准机构采用音圈电机驱动的双轴反射镜形式,精跟踪探测器使用4象限(4QD)探测器,可以获得±453 μrad的粗跟踪范围、±1.5°的粗跟踪方位角和俯仰角、720s的捕获时间[6]、±120 μrad的粗跟踪精度和±2 μrad的精跟踪精度[5].另一激光通信计划OICETS始于1985年,采用低轨道卫星搭载激光使用通讯设备LUCE(laser utilizing communication equipment)方案,以验证星间激光通信跟瞄技术、光通信技术以及器件的空间环境适应性.LUCE终端采用转台结构,光学天线口径为260 mm,重140 kg,功耗220 W,粗跟踪万向节直接由驱动电机驱动,附带两个光学编码器作为测角机构,粗跟踪探测器选用672像素×488像素的面阵CCD探测器.精跟踪系统由两个一维压电陶瓷驱动的快速反射镜和4QD探测器构成,超前瞄准系统同样采用四象限探测器4QD探测器.组成的ATP系统粗跟踪方位角和俯仰角范围分别为±190°和±60°,捕获时间为360 s[6],粗跟踪精度为±175 μrad,精跟踪精度为±1 μrad[5].
中国对卫星光通信技术的研究起步较晚,20世纪90年代后才开始进行比较深入的研究,其中,中科院上海技物所研制了基于指向镜的口径为300 mm的星地ATP系统,该系统与量子收发模块集成,已在热气球上完成3.4 km互瞄试验,精度优于5 μrad.中科院光电技术研究所的复合轴跟踪技术应用成熟,在该所设计研制的系统对空间飞行目标的跟踪精度达到了10 μrad,其设计的针对慢变化的点目标信号实验系统的精跟踪精度可达5 μrad.这些工作都为下一步进行空间激光通信技术系统的设计和研究打下了坚实的基础[7].
综合以上背景,本文主要以用于量子导航定位系统的空间量子卫星通信系统中的捕获阶段技术为研究对象,在介绍了空间量子通信的背景和ATP系统工作过程及相关结构的基础上,从捕获和粗跟踪两个方面展开了研究,详细分析了捕获阶段中涉及的各种技术和粗跟踪阶段的性能指标,并针对性能指标及其影响因素提供了提高捕获性能的建议.
1 ATP系统的组成及其工作过程
在空间量子通信系统中,由ATP系统完成捕获、跟踪和对准任务.ATP系统原理框图如图1所示,它主要是由粗跟踪系统、精跟踪系统以及超前瞄准系统组成.粗跟踪系统主要完成目标的捕获和粗跟踪.典型的粗跟踪机构主要包括常平架以及安装在上面的收发光学天线、分束器、粗跟踪探测器、粗跟踪控制器、万向架、角传感器以及伺服机构.系统的发射和接收的光学天线即一个光学望远镜;分束器(又称分束片、分束镜、分光镜)的作用是将信标光分为两路,一路给粗跟踪探测器,一路给精跟踪探测器[8];精跟踪系统主要包括两轴快速反射镜、精跟踪探测器、精跟踪控制器、执行机构和位置传感器.精跟踪控制器根据其探测器给出的偏差,控制快速反射镜动作,跟踪入射光,使通信两端视轴误差达到跟踪精度要求.典型的超前瞄准机构一般是由两轴快速反射镜及其执行机构以及超前瞄准探测器构成.超前瞄准机构主要补偿由于光束远距离传输引起的位置偏差,它根据星历表计算出瞬时超前角,通过超前瞄准探测器控制倾斜镜动作,使出射光相对于接收光偏转指定的角度,从而使出射光精确瞄准对方.
ATP主控单元通过姿态控制单元获得卫星姿态变化的信息,通过卫星主控单元获得卫星的轨道参数,经转化可得到卫星当前位置数据.ATP的工作过程可分为4个步骤:(1)通信双方的地面用户端作为发起方,空间量子卫星端作为捕获方.用户端根据星历表轨道预报,或者GPS坐标计算卫星端所在位置,转动粗跟踪系统中的执行机构将发散角较宽的信标光,覆盖卫星端所在的不确定区域(field of uncertain,FOU).卫星端同样根据星历表或GPS计算用户的大致位置,转动粗跟踪机构将粗跟踪相机CCD的视轴指向用户.当卫星端的粗跟踪相机CCD接收到上行信标光,便完成了捕获阶段;(2)卫星端捕获到用户端发射的信标光后,转入跟踪状态,将信标光的光斑位置引导到跟踪中心,然后卫星端指向用户端发射一发散角较窄的下行信标光;(3)用户端探测到卫星端发射出来的下行信标光,也进入跟踪阶段;(4)双方均各自跟踪对方视轴后,卫星端作为通信发射端发射量子通讯光,将量子光对准用户端,开始量子通信过程.
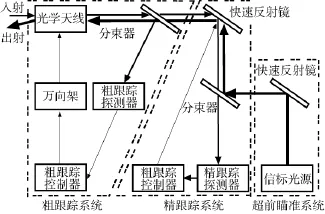
图1 ATP系统原理框图Fig.1 The principle diagram of ATP system
捕获阶段可以分为3个过程:初始指向、扫描和捕获动作[9].初始指向是指通信视轴从零位开始转动到指向通信对方所在不确定区域FOU的过程,其原理是:在己方位置、己方姿态和对方位置已知的情况下,满足通信双方在时间差已经被补偿的条件后,使用坐标转换计算视轴互指的方位角和俯仰角,并根据此角度信息,驱动转台带动视轴从初始零位开始旋转,直到指向对方[10].扫描是指在通信视轴完成初始指向工作后,对通信对方所在FOU的扫描.ATP系统需要在完成初始指向工作和扫描工作的基础上,实施捕获动作.通过扫描,当地面端发射的信标光进入了卫星端ATP系统的粗跟踪相机CCD视场,卫星端ATP系统将发起捕获动作,驱动二维转台,将信标光的光斑引导到捕获视场中心,从而使得卫星端视轴与入射光轴对准[9],完成整个系统的ATP过程.
在整个ATP工作过程中,视轴的初始指向主要由光学天线、粗跟踪探测器、粗跟踪控制器以及万向架组成的粗跟踪系统来实现.光学天线的本质是一个光学望远镜,用来接收和发射光信号[11].粗跟踪探测器一般采用CCD,其特点是阵列视场大,配合与光学天线同轴的镜头可以完成对目标信标光的成像[12],控制光学天线改变自身方向以瞄准目标,实现对大的FOU内目标的快速捕捉和粗跟踪.跟踪控制器可分为粗跟踪控制器和精跟踪控制器,当粗跟踪系统工作在捕获阶段时,粗跟踪控制器会根据接收到的指令将万向架上的光学天线固定在发送端的方位上[2],然后开始初始指向、扫描和捕获动作过程.粗跟踪系统具有动态范围大、驱动能力强、跟踪精度低、带宽窄的特点[4].
精跟踪系统由精跟踪控制器、精跟踪探测器和快速反射镜(fast steering mirror,FSM)构成,具有高的控制带宽和位置精度.其中,快速反射镜FSM一般采用高带宽高精度的压电陶瓷驱动或音圈电机驱动[13],以满足精跟踪高频微角转动的要求[8,13],实现粗跟踪系统的跟踪误差补偿.精跟踪探测器一般采用小面积CCD或四象限探测器4QD、CMOS等高灵敏度传感器[14].精跟踪控制器是精跟踪系统的核心,为了实现高带宽、高精度、鲁棒性优良的控制,需选用适合的控制算法.
超前瞄准系统作用是补偿由于通讯双方的相对以及光有限传播速度引起的实验影响,使发射光相对于接受光超前偏转一定角度,该角度被称为超前瞄准角,可根据星历表计算得到[8].
2 捕获阶段的初始指向和扫描技术
捕获是ATP系统中的关键技术之一.通信双方虽然有卫星轨道参数,但其预报精度有限,需要用信标光对FOU进行扫描,双方完成彼此的捕获.由于量子通信中通信光很弱,无法作为信标光使用[15],所以,当前的星地自由空间量子通信ATP系统初始指向过程主要采用双信标双端捕获.在这种捕获策略下,通信的两个终端之间的信标链路和通信链路彼此完全分开,各自拥有独立的发射和接收装置[14].双信标双端捕获策略的工作过程为:首先由用户端发射宽信标光,经卫星端的开环对准捕获到该信标光,一旦卫星端检测到该信标光,则立即结束快速扫描过程,同时卫星端发射自宽信标光.由于卫星端已经成功捕获到用户端的信标光,通信双方的信标光发射与接收互为对称,所以用户端也能捕获到卫星端发射的信标光.同样,一旦用户端检测到卫星端发射的信标光,则立即停止快速扫描过程,从而使通信的双方完成粗跟踪和精跟踪过程.当信标光稳定在视轴中心时,启动量子通信光,建立量子通信链路,开始量子通信过程.在量子通信的过程中,通信双方的信标光仍然处于工作状态,以便实时完成光束的精确定位[14].
2.1 初始指向技术
捕获中的初始指向过程通常采用光学天线扫描完成,用于用户端和卫星端链路的建立以及中断时的恢复.初始指向的实质是用户端和卫星端视轴指向方向的统一.实现初始指向的捕获技术通常有[4]:
1)凝视-凝视技术
又称为直接捕获技术[16],要求卫星端的信标光发散角大于用户端的FOU,同时,用户端的捕获视场角大于卫星端的FOU.这样,用户端的接收视场(field of view,FOV)完全覆盖卫星端光束的任何可能位置,可以实现直接捕获,捕获用时短,但是对功率和卫星轨道姿态定位精度要求极高,实现起来难度较大[16].
2)凝视-扫描技术
又称为单端扫描技术,分为卫星端扫描和用户端扫描.当卫星端的FOV足够大且用户端不满足信标光发散角完全覆盖条件时,ATP系统采用用户端扫描、卫星端凝视的技术.用户端按一定的扫描技术对FOU进行扫描,要求用户端的扫描完全覆盖FOU,且扫描时间尽可能小[16].此时,捕获时间是驻留时间、信标光束和FOU的函数.
3)扫描-扫描技术
又称为双端扫描技术.当用户端发送的信标光不能满足完全覆盖条件,并且卫星端的FOV也不满足完全覆盖条件时,ATP系统必须采用扫描-扫描技术,即用户端和卫星端都执行扫描动作.该种扫描技术常用嵌套扫描来实现,即双方在时间上必须保持一致,在一方的停留时间段内和另一方的扫描范围上留出一定的富裕量,避免两端时间上存在的误差,确保捕获成功[16].
上述3种扫描捕获技术在同一捕获概率下,捕获时间最短的是凝视-凝视技术,但其存在发送光束的覆盖问题,对功率要求较高,因此该捕获技术并不适用于长距离的星地空间量子通信.扫描-扫描技术虽然对于功率要求不高,但是在同一捕获概率下的捕获时间最长,嵌套扫描机构设计复杂,成本较高.相比之下,凝视-扫描技术在发送光束功率要求不高,扫描时间也相对较小,是目前星地量子通信中的最佳捕获技术[16].欧洲宇航局的SILEX计划采用的也是凝视-扫描技术来实现ATP系统对于量子光信号的捕获.
2.2 扫描技术
在捕获阶段的扫描过程中,需要确定扫描路径和扫描响应方式.
卫星端对用户端FOU的最初扫描是由GPS或星历表轨道预报来确定的.在设计扫描路径算法时,一般需要对扫描过程中卫星的切向速度、卫星的振动和噪声模型以及测量结果误差进行补偿.扫描路径一般分为以下4种[4]:分行扫描、螺旋扫描、分行式螺旋扫描和其他扫描路径.1)分行扫描(raster scan)又称为矩形扫描、光栅扫描.该种扫描路径容易实现,但是耗费时间较长,而且对于整个扫描区域都以等概率的方式扫描,无法从高概率区域开始扫描,因此扫描效率比较低.在任意时刻,控制扫描的步进电机只有一台工作,到达预定位置后另一台电机再开始运转[16].2)螺旋扫描与分行扫描相比,具有扫描效率较高、捕获时间较短的优点.其的缺点是只能对某些扫描区域的三分之一进行搜索,而且实现需要复杂的驱动电流来控制,在实际操作中不易实现.3)分行式螺旋扫描又称为矩形螺旋扫描、矩形向外扩展扫描.这种扫描路径结合了分行扫描和螺旋扫描的优点,可以先捕获概率最高的中心开始扫描,理论上可实现在更短的时间内捕获到信标光,且硬件结构和控制设计较为简单.
其他复杂的扫描路径还有利萨如曲线扫描以及玫瑰型曲线扫描等,这几种扫描路径实现起来都比较复杂,且在扫描路径中存在盲区.在实际应用中较少[16].表1显示了在均匀分布和高斯分布情况下,几种不同的扫描路径的平均捕获时间.由于实际中,目标的分布更接近于高斯分布,由表1可知,分行式螺旋扫描的平均捕获时间最短.此外,考虑简化系统结构,降低工程难度,分行式螺旋扫描目前星地量子通信中的最佳扫描路径.
在ATP系统的扫描过程中,需要考虑通信双方反馈信号的两种不同响应方式,根据响应方式的不同,可以分为两种扫描方式[17]:1)快速全场扫描; 2)步进式扫描.快速全场扫描要求发射端捕获探测器的FOV大于接收端的FOU.快速全场扫描指的是发射端用信标光从初始指向开始按照一定的扫描方式快速地扫过接收端FOU中的每个地方,完成后再回到初始点处检测是否有反馈信号.由于发射端对反馈信号的响应只能发生在信标光全场扫描之后,因此,快速全场扫描的捕获时间取决于全场扫描时间.步进式扫描与快速全场扫描不同之处在于在步进式扫描过程中的每个驻留点都需要等待足够长的时间来等待反馈信号.因此,步进式扫描的捕获时间与接收端在扫描FOU内出现的位置、链路距离和接收端系统的响应时间有关.
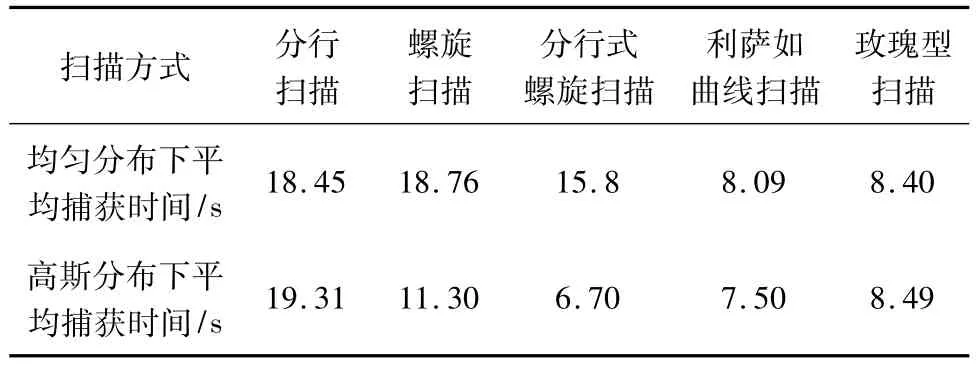
表1 几种不同扫描方式平均捕获时间比较[16]Tab.1 Comparison on average acquisitive times of different scanning ways
3 捕获阶段的精度及其性能
在量子导航定位系统中,捕获是建立星间光通信链路的必要条件.在捕获阶段的初始指向、扫描和捕获动作3个过程中,分别对应的性能指标:1)预指向精度;2)平均捕获时间和捕获概率;3)探测器的能量阈值.
通常情况下,预指向精度符合 Rayleigh分布[14],要求卫星经过用户运动过程中用于粗跟踪预指向精度为0.5°[4].指向精度直接影响FOU的大小,FOU小捕获概率低,FOU大捕获时间长.为了实现大于99%的视场捕获概率,捕获视场的FOU的大小定为预指向精度的3倍,即3σ(双边)[14-18].预指向精度受到指向误差的影响,指向误差包括万向架指向误差和光学天线指向误差,万向架上装有光学天线,通过GPS/INS系统给出旋转姿态角,通过粗跟踪控制器控制万向架转动.由于存在着安装误差、应力、控制延迟误差、噪声、空间温度的变换等因素的影响,预指向精度下降,这些因素必须在设计中给予考虑[14].
3.1 平均捕获时间和捕获概率
假设在卫星经过用户的过程中,地面信标光完全覆盖卫星,则星地链路建立由卫星上载荷预指向精度决定.
根据中心极限定理,在俯仰和滚动方向的分量独立且符合正态分布,则概率密度 f(θv,h)可表示为[19]

其中,f(θv,h)为目标在不确定区域内的概率密度,σv,h为该概率密度的方差,θv,h为目标的位置坐标.
捕获的关键是在FOU内利用光学天线进行扫描,以找出信标光到达的方向.在保持适当捕获概率的情况下,捕获时间应尽可能短.在扫描角度范围Ωu内的捕获概率为[19]

其中,Pu为扫描角度范围Ωu内的捕获概率,θv为俯仰角,θh为滚动角,在给定的捕获覆盖率情况下,Ωu由固定偏移量在两轴方向分布的均方差σθ决定,同时积分范围Ωu的选择还与扫描方式有关.
1)平均捕获时间
捕获时间定义为粗跟踪系统的执行机构使光学天线的视轴开始向FOU移动,到粗跟踪探测器CCD视场接收到对方发射来的信标光为止[14].
对于星地量子通信系统,由于通信时间可以很长,所以对链路建立时间的要求相对较宽.另一方面,由于通信距离很长,所以,信标光的输出功率应作为参数选取的首要依据.视频信号处理时间和粗跟踪执行机构的转动时间应小于CCD的积分时间,而且视频信号处理和粗跟踪执行机构的转动与CCD的积分是并行工作,但是视频信号处理和粗跟踪执行机构的转动相对于CCD积分要延迟1帧时间,只有这样才能保证整个开环扫描和粗跟踪过程的开环带宽和闭环带宽.所以,每次捕获时间为CCD在开环扫描阶段的积分时间[14].下面基于建立的捕获模型,以分行式螺旋扫描为例,给出平均捕获时间的计算公式.

图2 分行式螺旋扫描Fig.2 Raster-spiral scan
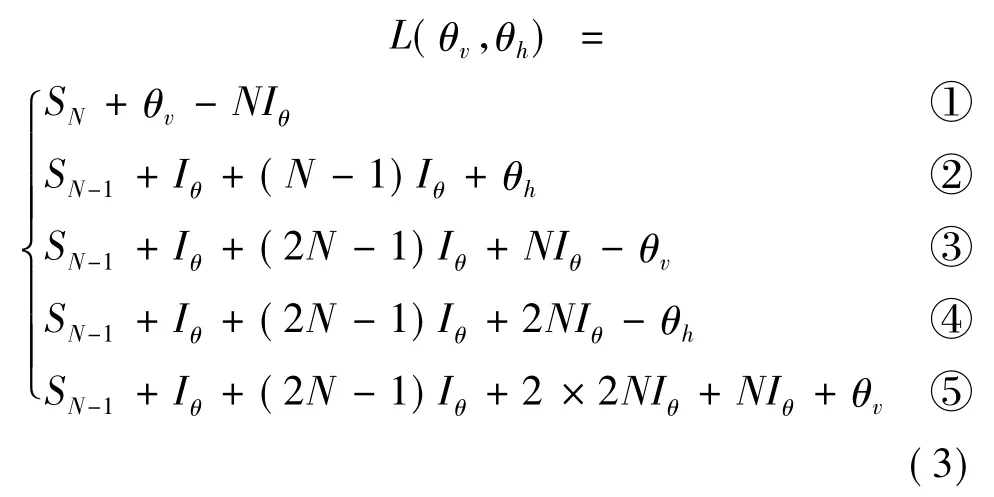
把扫描范围的中心作为原点,建立直角坐标系.设扫描步长为Iθ,则当视场中心指向的坐标位于第N 圈 时,前 N-1 圈 的 角 度 路 程 为 SN-1=
当视场中心指向的坐标为(θv,θh)时,分行式螺旋扫描的角度路程可表示为:
根据扫描的角度路程,已知系统的带宽为FAC,可以得到时间函数为

由此可以得到平均捕获时间为

设定捕获概率要求不小于99%,在相同捕获概率的条件下,根据平均捕获时间长短来判断不同参数对于ATP系统捕获性能的影响.基于上述条件,根据式(5)可以得到分行式螺旋扫描的平均捕获时间与扫描速度、扫描步长的关系,对于分行式螺旋扫描,在一定的捕获概率要求下,固定偏移量分布的均方差σθ确定了扫描角度范围Ωu,通过优化选取扫描步长和扫描速度可以缩短平均捕获时间,从而提高捕获性能.捕获时间与系统带宽、捕获步长、扫描角度路程、概率密度等有关[4].同时,还受到FOU大小、信标光的束散角、CCD的视场角、CCD的积分时间的影响[14].
在采用凝视-扫描技术的情况下,提高信标光覆盖FOU的概率除了采取振动抑制,粗、精跟踪联合工作模式,还可以采用在扫描中增加重叠因子的方法[8].影响初始捕获FOU的因素有指令引导误差、指向误差、动态滞后误差、平台振动抑制残差、坐标变换误差[14].减小FOU着重从以下几个角度考虑:提高GPS/INS精度、振动抑制、提高指向精度、减小坐标变换误差、提高采样频率等[14].可概括为两个方面:一是提高检测精度,二是减小传输延迟时间.具体措施包括应用高精度的GPS/INS捷联式组合系统,提高定位和姿态的检测精度,减小数据采集的动态滞后性.从光学仪器和卫星的相互运动及卫星的振动等方面来考虑如何提高指向精度.应用高性能的陀螺系统和减震系统来抑止低频残差和高频残差等措施.
2)捕获概率
假设可以通过重叠因子来补偿干扰和振动对捕获概率的影响,即由于干扰和振动的影响,而出现漏扫的概率为Ps=0,设预扫描FOU的覆盖率为Pu,那么捕获概率PAC可以表示为

其中θu为立体角.
讨论不同捕获视场θu对捕获概率的影响.随着捕获视场θu的增大,捕获概率呈上升趋势,而固定偏移量的增加又降低了捕获概率.通常情况下的粗跟踪系统的捕获视场大于2°×2°,当粗跟踪系统的捕获视场取2.5°×2.5°时,固定偏移量小于0.5°的条件可以保证捕获概率大于95%.
捕获概率由FOU对于目标的覆盖率、信标光覆盖FOU的概率和接收端CCD探测器的探测概率[14]决定FOU对于目标的覆盖率包含两种不确定因素,目标位置的不确定性和捕获视轴的不确定性.后者是主要因素.
由于捕获时通信两端处于开环阶段,系统的外部参数测量误差和系统执行误差都会影响信标光覆盖FOU概率,系统的外部参数误差有卫星姿态和轨道误差、卫星平台振动误差等,系统执行误差是指跟踪机构的指向误差[8].在捕获中,接收端CCD探测器探测概率会收到噪声影响,主要的噪声源有暗电流噪声源、热噪声、背景噪声、散弹噪声以及读出噪声、像元灵敏度不均匀引起的噪声等[14].
3.2 探测器的电流阈值和灰度阈值
捕获过程中,当信标光经过系统链路传输投射到接收端粗跟踪探测器CCD上的光斑能量在一个比特时间内达到一定阈值时[16],结束扫描过程,开始捕获动作.由于光斑能量大小经过粗跟踪探测器转换成电流值来衡量,所以称该阈值为电流阈值.粗跟踪探测器CCD的电流决判阈值选择取决于噪声和粗跟踪探测器的灵敏度[4].
面阵探测器CCD质心算法精度高、稳定性好、计算处理时间短,较为适合在星载平台相机中使用.质心算法是基于平面几何中求质心原理的一种算法,探测系统将所得的光斑质心位置作为信标光光斑的能量中心.设粗跟踪探测器CCD光敏面上图像光强分布为 v(x,y),其中(x,y)表示图像像元在粗跟踪探测器焦平面坐标系中的位置,通过式(7)可得图像灰度质心(Cx,Cy),即为光斑的能量中心.
其中,W(x,y)为质心计算过程中的权重.
W(x,y)计算方式为[9]

其中,T为区分光斑和背景的灰度阈值,受到粗跟踪探测器CCD的最小信噪比的影响[13].
灰度阈值的选取会对虚预警率和捕获概率产生较大影响:灰度阈值过低,则对一定的噪声水平来说虚预警率增大;灰度阈值过高,则对一定的信号水平来说捕获概率降低.在系统参数设计中,一般将灰度阈值定为粗跟踪探测器暗背景最低值与7倍信噪比的之和,这样可以保证虚预警率接近0[9].
虽然质心法可以获得很高的计算精度,但在计算质心前需对采集的图像进行一系列的预处理来消除通信链路以及探测器本身的干扰.在星地量子通信的过程中,传输链路上存在大气信道,该干扰对粗跟踪探测器CCD会产生严重的影响.大气对信标光光束的折射、扩展、闪烁、分裂等作用,会使得粗跟踪探测器的成像光斑变为形状不规则、亮度分布不均匀的光斑,而非理想的圆形光斑.此外,粗跟踪然测器本身具有的非均匀性、坏点等缺陷也会影响探测的精度[13].
在捕获阶段,对精度要求不高,主要判断光斑的有无,因此最少要求有一个像元的信号超出灰度阈值即可,因此采用最亮像元Po的能量Eo来表征光斑信号的强弱.假设粗跟踪探测器的曝光时间为Tint,则有

其中,系数k表示系统要求超出灰度阈值的像元能量占光斑总能量的最小百分比,它与系统对有效光斑尺寸的要求和光斑的功率分布有关.粗跟踪探测器焦平面上所需要的最小接收光功率Pr(min)的计算公式为

其中:β为电流阈值和噪声的倍数关系;Vn为噪声电压;Rv为电压响应率,表征了粗跟踪探测器将光功率转换为电信号时的转换关系,其计算公式为

其中:h为普朗克常数;c为光速;λ为信标光波长; QE为探测器的量子效率,一般取20%;CG为转换增益,一般取11.5 uV/e[9].
4 粗跟踪阶段的精度及其性能
4.1 粗跟踪控制系统
当捕获完成后,主控单元发指令,粗、精跟踪控制器将接收来自各自传感器的信号,此时系统可以从粗跟踪和精跟踪探测器上获得信标光的位置.为了实现空间量子通信中量子光的捕获和跟踪,典型的ATP系统采用复合轴伺服控制,在捕获阶段,采用低带宽的粗跟踪控制系统进行大范围跟踪,同时,用高带宽的精跟踪控制系统对粗跟踪误差进行补偿.
粗跟踪系统先后在捕获和粗跟踪两个阶段工作:在捕获阶段时处于开环控制,采用较多的像素和较大的视场,此时只能形成内闭环的控制回路,其反馈单元为惯性陀螺,检测速度信息,同时经积分检测位置信息,可以有效抑制本身的各种干扰,但不能纠正其他因素引起的两视轴的偏差;粗跟踪阶段处于闭环控制,采用较少的像素和较小的视场,帧频较高,角度分辨率也高,此时通信两终端形成外闭环,其反馈单元由粗跟踪探测器CCD和惯性陀螺组件构成,其位置检测精度与速度陀螺经积分控制后的精度相比更精确,同时还能纠正两视轴的装校、热扰动等误差[14-15].粗跟踪系统一般采用多环路控制方案,即将控制系统分解成多个环路,使用不同的反馈量分别进行闭环控制.实验证明,当内环带宽为外环带宽十倍左右时,内环可等效为外环的一阶惯性负载,调整好内环后将其作为外环简单负载,简化了外环调试难度.如此将整个负载系统分解为从内到外多环,分别调节,提高控制精度,减小调试复杂性.
粗跟踪控制系统内环电流环采集实际电机相电流作为反馈;速度环采用测角机构测量电机的绝对角度,并差分求出电机速度信息作为反馈;位置闭环反馈由粗跟踪探测器对目标信标光成像提取光斑质心位置提供[12].
4.2 粗跟踪阶段性能指标
为了实现粗、精视场顺利解耦,需要保证精跟踪精度为粗跟踪精度的2~3倍.粗跟踪系统的性能指标主要有以下4项[3]:1)粗跟踪探测器CCD检测精度;2)光学天线视轴稳定精度;3)粗跟踪控制系统控制精度;4)光机加工和调校精度.
1)粗跟踪探测器CCD检测精度
当粗跟踪系统工作在粗跟踪阶段时,误差检测元件,即粗跟踪探测器CCD的输出误差决定闭环控制系统的误差.由于检测元件自身的误差不可避免,因此这部分误差将直接转变为粗跟踪系统的误差,影响粗跟踪系统精度.对于通信终端,宽信标光视场应为粗跟踪精度的4倍以上,才能保证在捕获过程中减小覆盖,进而减小捕获时间,增加捕获概率.选择CCD 810作为粗跟踪探测器,它的接收视场角为20 mrad,CCD器件的像元总数取480像素×480像素,即可求得对应的像素分辨率42 μrad.采用能量对中算法,将光斑成像于3像素× 3像素之内,最终实现σ1=50 μrad的检测精度.
2)光学天线视轴稳定精度
在星间光通信中,ATP系统捕获与跟踪精度在很大程度是上取决于光学天线系统对接收的光信号成像的精度程度,光学天线起着重要作用.光学天线视轴稳定精度主要受到两个方面的误差影响:由于负载承受的扰动力矩引起的误差;由于光电传感器平台振动引起的误差.针对这两方面的误差,粗跟踪控制系统在采用惯性稳定控制(被动减震措施)使视轴稳定在固定的惯性空间方向的基础上,同时采用主动抑制(主动减震措施)来消除平台振动对光学天线视轴稳定精度的影响.这种主、被动相结合的方式可以对卫星振动进行有效抑制,使光学天线视轴稳定精度达到σ2=30 μrad.
3)粗跟踪控制系统控制精度
对于时变系统,由于输入参数信号不断变化,且系统的动态响应能力是有限的,这样会造成系统动态滞后误差,对粗跟踪控制系统的控制精度有很大影响.动态滞后误差可以表示为

4)光机加工和调校精度
光机加工和调校精度主要受到轴系同轴度、摩擦力矩误差、不平衡力矩误差、线扰和风扰力矩误差等影响,取精度为σ4=20 μrad.粗跟踪系统跟踪精度的计算公式为

从最优化的角度,系统同时满足四项性能指标同时达到最优是相互矛盾且不容易实现的.一种解决办法是分析哪种精度是最主要的,然后针对最主要性能指标采取相应的方法来提高精度.
ATP主控单元根据星历表的信息和光学设计要求确定出的超前角,卫星轨道计算的超前角度精度、超前瞄准子系统的控制精度,以及跟踪系统的跟踪精度和跟瞄精度等,决定了通信光是否被主动方接收到,这些都卫星光链路能否成功的关键,也是量子导航定位系统的关键.ATP系统将信标光捕获到粗跟踪相机视场,粗跟踪机构将光斑引到粗跟踪相机中心,再由其后的精跟踪机构,通过复合控制环路进一步动作,将光斑稳定在相机中心实现精跟踪过程.采用粗、精两级跟踪方式,可以在精度和准确度上实现跟踪的更高性能.
5 总结
在对量子导航定位系统进行捕获系统设计时,为了得到高性能,需要考虑的因素较多,包括:不确定区的大小、初始指向误差和期望的指向误差、扫描方式、总扫描时间捕获时、在扫描子区的驻留时间、卫星的位置信息及相对运动、捕获的功率要求、卫星振动和噪声和捕获用激光束宽及其波长等.在进行跟踪系统设计时,需要考虑的因素包括:跟踪视场大小、跟踪角度范围、跟踪控制精度、跟踪控制带宽、跟踪探测器选择、卫星间的相对运动、卫星振动频谱特性和跟踪功率要求等.只有综合考虑各个方面的影响因素,才有可能设计出性能更好的ATP系统.
[1]鄢永耀.空间激光通信光学天线及粗跟踪技术研究[D].中国科学院大学,2016.YAN Y Y.Research on optical antenna and coarse tracking technology of space laser communication[D].PHD.Changchun:Changchun Insititute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2016.
[2]潘浩杰.自由空间光通信(FSO)中APT关键技术研究[D].南京:南京邮电大学,2012.PAN H J.Research on the key technology of ATP for free space optical communication[D].Nanjing:Nanjing University of Posts and Telecommunications,2012.
[3]李德辉.自由空间激光通信系统ATP粗跟踪单元研究[D].长春:长春理工大学,2007.LI D H.Research of ATP coarse track cell in free space laser communication system[D].Changchun:Changchun University of Science and Technology,2007.
[4]王娟娟.基于GPS/INS运动二维转台的指向技术研究[D].山东:山东大学,2014.WANG J J.Research on pointing technology of two-dimension rotating platform based on GPS/INS[D].Shandong:Shandong University,2014.
[5]姜义君.星地激光通信链路中大气湍流影响的理论和实验研究[D].哈尔滨:哈尔滨工业大学,2010.JIANG Y J.Theoretical and experimental researches on influences of atmospheric turbulence in the satellite-toground laser communication link[D].Harbin:Harbin Institute of Technology,2010.
[6]皮德忠,尹道素.空间光通信ATP技术及其进展[J].电子科技大学学报,1998,27(5):462-466.
[7]季力.基于空间光通信ATP系统的图像处理技术研究[D].杭州:浙江大学,2003.
[8]罗彤.星间光通信ATP中获取,跟踪技术研究[D].成都:电子科技大学,2005.LUO T.The Research on acquisition and tracking technologies of ATP system in optical intersatellite communications[D].Chengdu:University of Electronic Science and Technology of China,2005.
[9]白帅.空间二维光电转台的高稳定捕获跟踪技术研究[D].上海:中国科学院研究生院(上海技术物理研究所),2015.
[10]赵馨,刘云清,佟首峰.动态空间激光通信系统视轴初始指向建模及验证[J].中国激光,2014,41(5): 145-150.ZHAO X,LIU Y Q,TONG S F.Line-of-sight initial alignment model and test in dynamic space laser communication[J].Chinese Journal of Lasers,2014,41(5): 145-150.
[11]熊金涛,张秉华.空间光通信 ATP系统设计分析[J].电子科技大学学报,1998,27(5):467-472.
[12]江昊.星地量子通信跟瞄系统仿真与检测技术研究[D].上海:中国科学院研究生院(上海技术物理研究所),2012.
[13]钱锋.星地量子通信高精度ATP系统研究[D].上海:中国科学院研究生院(上海技术物理研究所),2014.
[14]赵玉鹏.自由空间激光通信系统高概率,快速捕获技术研究[D].长春:长春理工大学,2007.
[15]梁延鹏.星地光通信ATP对准特性仿真研究[D].合肥:中国科学技术大学,2014.
[16]江常杯.卫星光通信系统捕获对准跟踪技术研究[D].杭州:浙江大学,2007.
[17]李鑫.星间激光通信中链路性能及通信性能优化研究[D].哈尔滨:哈尔滨工业大学,2013.
[18]刘鹏,王晓曼,韩成,等.空地激光通信系统中捕获子系统仿真[J].光子学报,2014,43(2):0206004-1-0206004-6.LIU P,WANG X M,HAN C,et al.Simulation of acquisition in space-ground optical communication system[J].Acta Photonica Sinica,2014,43(2):0206004-1-0206004-6.
[19]冯国柱,杨华军,邱琪,等.螺旋式扫描在激光雷达系统中的仿真优化分析[J].红外与激光工程,2006,35(2):165-168.FENG G Z,YANG H J,QIU Q,et al.Analyzing from simulation of optimizing the spiral scan in the laser radar system[J].Infrared and Laser Engineering,2006,35 (2):165-168.
[20]荣健,胡渝,钟晓春.ATP跟瞄精度与最佳信号光发射角的研究[J].中国激光,2005,32(2):221-223.RONG J,HU Y,ZHONG X C.Study of atp accuracy and the optimum optical signal transmitting angle[J].Chinese Journal of Lasers,2005,32(2):221-223.
[21]贾建军,钱锋,王建宇,等.具有光轴自校准的量子通信ATP精跟踪系统及校准方法.2014.
[22]林均仰,王建宇,张亮,等.高带宽量子通信信标跟踪技术研究[J].光通信技术,2010,34(7):57-59.LI J Y,WAMG J H,ZHANG L,et al.Research on highbandwidth technology for quantum communication ATP system[J].Optical Communication Technology,2010,34(7):57-59.
[23]亓波,陈洪斌,任戈,等.100 km量子纠缠分发实验捕获跟踪技术[J].光学精密工程,2013,21(6): 1628-1634.QI B,CHEN H B,REN G,et al.ATP technology for 100-kilometer quantum entanglement distribution experiment[J].Optics and Precision Engineering,2013,21(6): 1628-1634.
[24]颜超超,刘瑾,杨海马,等.ATP跟瞄系统中位置敏感探测器测量精度研究[J].激光与红外,2015,45 (5):524-531.YAN C C,LIU J,YANG H M,et al.Measurement accuracy research of position sensitive detector in ATP system[J].Laser&Infrared,2015,45(5):524-531.
[25]DUAN L M,LUKIN M D,CIRAC J I,et al.Long-distance quantum communication with atomic ensembles and linear optics[J].Nature,2001,414(6862):413-418.
[26]ZHANG X,CHEN Y,WANG C,et al.Neuronal somatic ATP release triggers neuron– satellite glial cell communication in dorsal root ganglia[J].Proceedings of the National Academy of Sciences,2007,104(23): 9864-9869.
[27]JIANG H,WANG J,JIA J,et al.The design and research of coarse tracking system for space quantum communication[J].Opt.Commun.Technol,2012,36 (6):43-46.
[28]ZHANG M,ZHANG L,WU J,et al.Detection and compensation of basis deviation in satellite-to-ground quantum communications[J].Optics express,2014,22 (8):9871-9886.
[29]JIANG H,JIA J,WANG J.Simulation and test platform for free-space quantum communication[C]//6thInternational Symposium on Advanced Optical Manufacturing and Testing Technologies.Xiamen,2012:84201A-1-84201A-6.
Techniques of Acquisition and Coarse Tracking in the Quantum Navigation and Positioning System
CONG Shuang1,WANG Hailun1,ZOU Zisheng1,SHANG Weiwei1,SUI Yan2
(1.Department of Automation,University of Science and Technology of China,Hefei,230027,China; 2.Beijing Institute of Satellite Information Engineering,State Key Laboratory of Space-Ground Integrated Information Technology Beijing 100086,China)
Quantum navigation and positioning systems require a quantum-satellite information communication system for signal acquisition,tracking,and pointing(ATP).The ATP system is important for quantum-satellite information communication,which involves establishing a quantum communication link and resuming it.Cooperation between coarse and fine tracking can ensure that communication between the two parties attains the desired signal-tracking performance.In this paper,we describe in detail the acquisition phase and the coarse tracing technique of quantum-satellite communication for quantum navigation systems.The initial pointing technique,scanning technique,precision and performance of the capture phase are analyzed.Stage precision,its performance index,and other key technologies are also discussed.
acquisition;coarse tracking;quantum navigation;scanning
V448.1
A
1674-1579(2017)01-0001-10
10.3969/j.issn.1674-1579.2017.01.001
丛 爽(1961—),女,教授,研究方向为量子系统控制,先进控制策略及运动控制等;汪海伦(1994—),女,硕士研究生,研究方向为量子导航定位系统;邹紫盛(1993—),男,硕士研究生,研究方向为量子导航定位系统;尚伟伟(1981—),男,副教授,研究方向为智能机器人和先进运动控制等;隋 岩(1983—),女,工程师,研究方向为机器人控制,运动控制等.
*国家自然科学基金资助项目(61573330)和天地一体化信息技术国家重点实验室开放基金资助项目(2015_SGIIT_KFJJ_ DH_04).
2016-11-05