FANUC机器人弧焊应用案例教学研究
2017-03-31于艳平
于艳平
(苏州市电子信息技师学院,江苏苏州 215008)
FANUC机器人硬件和ROBOGUIDE软件学习是工业机器人专业的专业课程,也是重点内容。怎样在教学过程中不断提高学生的学习积极性,开发学生的思维与创造能力,更好的完成任务呢?最终在教学上形成一个有效的系统及提高学生专业能力为本位的教学一直是我们的动力和方向。通过课堂教学的实际研究和探索,希望这样的教学方法、模式可以帮助学生学习和教师上课。
1 安全操作引导教学
机器人教学过程中务必注重安全知识教育,对学生做好安全提醒安全监督,做到安全教育警钟长鸣,注意以下几点:不允许带手套操作示教盒以及操作面板;在电动操作机器人时采用较低的速度倍率以增加对机器人的控制机会;在按下示教盒的点动键之前要考虑到机器人的运动趋势;预先考虑好避让机器人的运动轨迹,并确认该线路不受干扰。
本环节教学讲解过程采用传统教学方式,教师作出讲解并发出《学生安全责任任务书》,学生进行填写来加强学生对安全的重视度。
2 细致讲解示教盒
示教盒简称TP,它主要是作用为:移动机器人、编写机器人程序、试运行程序、生产运行、查看机器人状态(I/O设置;位置信息)、手动运行等。本环节教师需要制作微课,讲解示教盒使用方法,指导学生学习。
3 设置坐标系
坐标系是为确定机器人的位置和姿态而在机器人或者空间上进行定义的位置指标系统。坐标系分为关节坐标系、直角坐标系、世界坐标系、工具坐标系、用户坐标系。
本环节采用的教学方法和具体任务安排如表1所示。
4 弧焊应用实例介绍
(1)弧焊工作准备:打开控制箱电源、适变器电源、全体闸。
(2)弧焊一个钻戒模型。
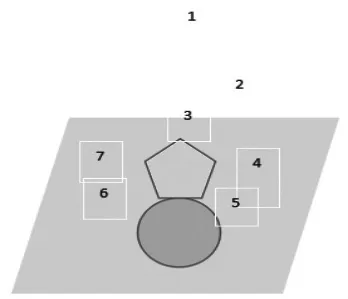
图1 钻戒模型图示
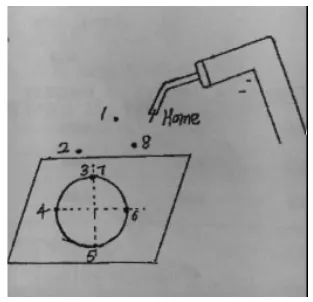
图2 圆形图示
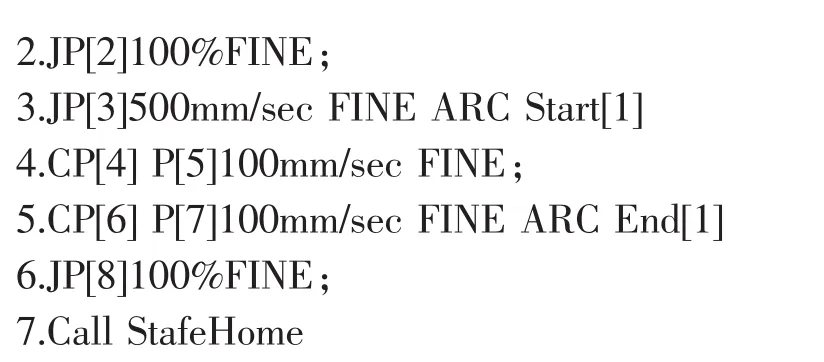
正五边形的程序如下:

圆弧程序如下:

表1
本环节采用的教学方法和具体任务安排如表2所示。
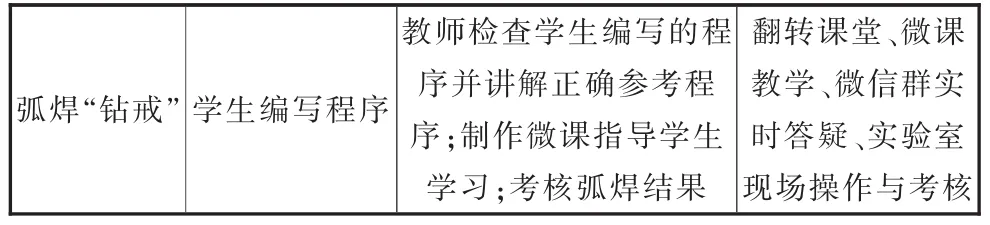
表2
5 ROBOGUIDE软件建立基本仿真模型
(1)本环节采用的教学方法和具体任务安排如表3所示。
(2)建立基本搬运模型,如图3。
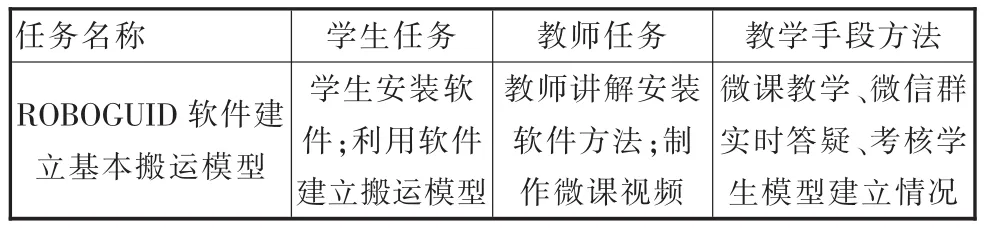
表3
6 反思与总结
在本次教学过程中根据教学内容进行教学方法设置,使用翻转课堂、微信讨论组进行答疑、微课教学等教学方法与传统的教学方法相结合。我们也对三组同学在四项任务考核过程中取得的成绩作出了分析,在日常教学过程中感受到学生对于弧焊作品的关注程度和热情,这些也给教师坚定了信心,感受到传统的教学方法与数字化教学方法以及先进理念相结合会带来更好的教学效果。
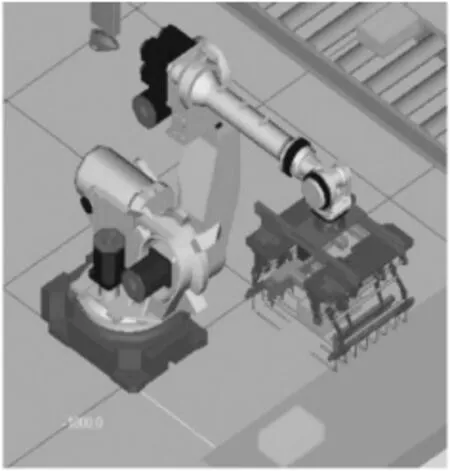
图3 基本搬运模型
[1]彭芳.机器人仿真平台在程序设计教学中的应用[J].教育信息技术,2013(3):58-60.
[2]乌日根.焊接机器人操作技术[M].北京:机械工业出版社,2016.
[3]王燕.机器人技术应用一体化教学改革与实践[J].现代职业教育,2016(1):180-181.