底锥张角对陀螺转动稳定性的影响
2017-03-29余小英李凡生周采宜
余小英,李凡生,周采宜
(1.广西民族师范学院 物理与电子工程学院,广西 崇左532200;2.广西师范大学 物理科学与技术学院,广西 桂林 541004)
打陀螺运动是一项少数民族传统体育运动项目。陀螺的样式五花八门,图1所示的平头陀螺为少数民族传统体育运动会比赛用陀。对打陀螺运动的研究主要是从体育学的角度研究打陀螺技术的特点和分析陀螺技术的动作结构[1-3],也有学者在其文化作用和健身作用方面做研究[4-5]。从物理学角度研究探讨陀螺,主要集中在陀螺仪方面,如微机械陀螺仪[6]、光纤陀螺仪[7]和振动陀螺仪[8]。

图1 平头陀螺
打陀螺比赛中的防守和进攻姿势繁多,技术的运用五花八门,但不管是何种技术的运用都离不开陀螺的本质——旋转时间长和打得准。其中陀螺的旋转时间取决于陀螺转动的初速度。陀螺在旋转的时候,不但围绕本身的轴线转动,而且还围绕一个垂直轴作锥形运动。也就是说,陀螺一面围绕本身的轴线作“自转”,一面围绕垂直轴作“公转”。陀螺围绕自身轴线作“自转”运动速度的快慢,决定着陀螺摆动角的大小。转得越慢,摆动角越大,稳定性越差;转得越快,摆动角越小,因而稳定性也就越好。但在实际的打陀螺运动中,陀螺在转动过程中要克服与地面之间的摩擦力做功。陀螺转动的初动能为为陀螺的转动惯量,转动的初始角速度。在具有相同的转动初动能和相同的地面状况下,底锥张角对陀螺的稳定性是否有影响?采用极限法来思考:陀螺正常时是可以靠惯性转动,因为陀螺尖端接触地面几乎为一个点,阻力作用效果很小,需要较长时间才能停下来;陀螺倒过来,底锥朝上,阻力作用效果很明显,几乎不可能靠惯性继续转动。这一上一下的区别就在于陀螺的底锥张角不同,是否有一个合适的角度,使得陀螺转动最稳定?笔者带着这个疑问,通过制作不同规格的陀螺及其转速控制装置,研究底锥张角对陀螺转动稳定性的影响。
1 陀螺及其转速控制装置的设计与制作
1.1 陀螺的制作
1.1.1 制作材料与用具
制作陀螺的材料是半径不同的圆柱状尼龙棒和铁钉以及铁板,使用到的工具有机床、台钻、打磨仪、量角器、电子秤、直尺、游标卡尺和螺丝批。常见的陀螺通常是木质的,笔者采用尼龙棒作为材料,主要是尼龙棒有比较规则的形状且在加工的过程中不易出现开裂的情况。
1.1.2 制作过程
为了探究影响陀螺底锥张角对陀螺旋转稳定的影响,设计了制作质量相同但底锥张角不同的陀螺,陀螺底锥张角设计的角度范围是50°~140°,角度间隔 10°。
陀螺的制作过程:1.利用电子秤、直尺和游标卡尺等工具测量出尼龙棒的密度备用;2.切出7cm长的尼龙棒,在机床上设定底锥张角的角度,把尼龙棒放在机床上制作底锥张角为50°~140°的陀螺;3.设定陀螺质量,根据标准值切割掉多余的质量,切割出相同质量的尼龙棒(计算切割质量的方法,利用步骤1计算出的密度来求取切割长度)。
为了方便研究,笔者用同一尼龙棒制作质量相同而底锥张角不同的陀螺。为了避免陀螺底锥尖端过快磨损,在陀螺底锥用台钻打了一个小孔,然后再旋入小陀钉。因为控制陀螺旋转的初速度的系统是利用电磁铁吸附陀螺旋的,所以还必须在陀螺的顶部安装一块与陀身半径相同的铁块(如图2所示)。最后加工出来的陀螺如图3所示。
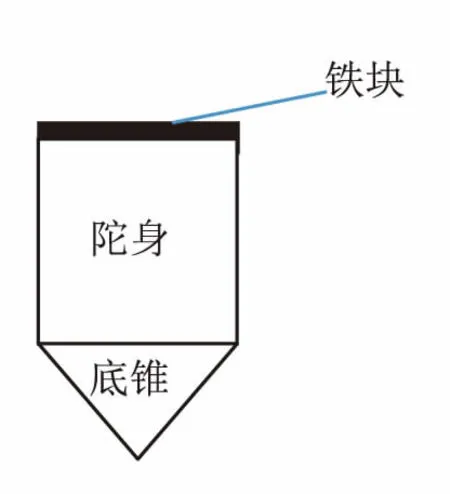
图2 实验陀螺示意图

图3 陀螺成品
1.2 陀螺转速控制装置的设计与制作
研究不同底锥张角对陀螺稳定性的影响,就要对陀螺的初始转动速度进行控制。笔者设计并制作了如图4(a)所示陀螺转速控制系统装置,它的主要部分是电磁铁,通电给电磁铁就可以把带有铁块的陀螺吸住,由电动机带动电磁铁旋转,电磁铁断电后即可释放陀螺。
装置实物如图4(b)所示,装置构成包括一个280w的可调转速的电动机、2个皮带轮、1根皮带、14V的电磁铁、可调学生电源、2个相同同的轴承、2个大小相同的轴承座、1根长度为50cm轴(塑料水管)、支架(由1.2m的槽钢2根、60cm的槽钢2根和50cm槽钢2根焊接而成)和HT-4200型非接触式数字手持式转速表。若干螺母组装而成。
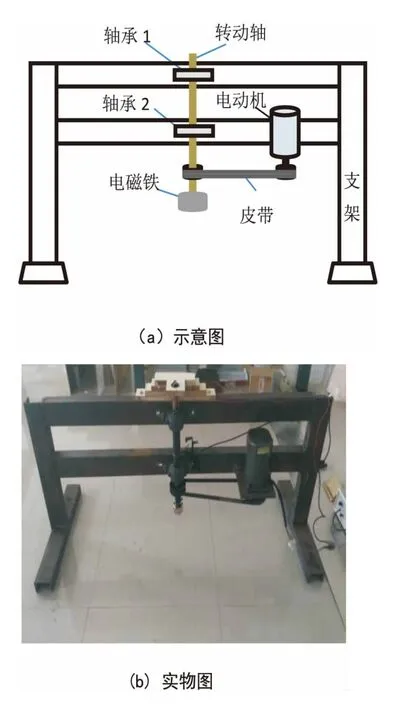
图4 陀螺转速控制装置
在制作这个装置的过程中,电磁铁的连线是一个技术难关:接在电磁铁上的导线必须能随着电磁铁一起转动,但其供电电源却是固定的,如果直接连线是行不通的,这就需要用电刷。但在实际制作中,笔者发现电刷的制作比较麻烦,且容易出现导电不良的现象。
如图5所示,利用金属轴承内外层实现电刷功能,电磁铁的两个接线柱分别和两个金属轴承的内层相连(转动轴是塑料水管制成,连接导线可以从水管内穿过),金属轴承的外层与电磁铁的电源相连。因为金属轴承的外层与内层接触是较为紧密的,当控制电磁铁电源通断就可以控制电磁铁磁性的有无,从而实现陀螺的吸附或释放。这一动作不会受到电磁铁转动的影响。
2 陀螺稳定性影响的实验研究
陀螺围绕自身轴线作“自转”速度的快慢,决定陀螺稳定性,转得越快,稳定性越好。陀螺转动的能量损失主要用来克服摩擦力做功,能量损失越多,转动的时间越短,因此,可以通过比较相同情况下陀螺的转动时间来比较其稳定性。为了方便比较,笔者选用旋转半径相同,不同底锥张角的陀螺来进行实验。陀螺质量为190g,铁块的质量为86.2g,半径为3.1cm。
由图2可知,陀螺可以分为铁块、陀身和底锥三部分,则整体的陀螺等于这三部分对中心轴的转动惯量之和,由理论公式知:
铁块的转动惯量为

陀身的转动惯量为

底锥的转动惯量为

则

其中,R为铁块、陀身和底锥的半径,ρ为尼龙棒的密度,h2和h3为陀身和底锥的高度,将上文陀螺制作过程中实验步骤1得到的实验数据代入以上各式可算得各个陀螺的转动惯量,具体数据如表1。

表1 质量相同底锥张角不同陀螺的转动惯量
从表1表可知,当旋转半径相同的情况下,质量相同而底锥张角不同陀螺的转动惯量相差不多。根据陀螺转动的动能计算公式可知,当陀螺具有相同的转动初速度时,其转动的初动能大致相等。因此可以通过研究质量相同而底锥张角不同陀螺的转动时长来研究其稳定性。
为了研究底锥张角是否对陀螺转动的稳定性有影响,笔者把质量均为277.6g角度为50°~140°的陀螺吸附在电磁铁下面,打开电动机,带动电磁铁旋转,调节电动机转速,利用HT-4200型非接触式数字手持式转速表测量时电磁铁转速,确保陀螺获得相同的转动初速度。待电磁铁转动稳定时,断开电磁铁的电源开关,释放陀螺。用秒表记录得各个陀螺在同一地面的旋转时间。由实验得底锥为50°~70°的陀螺获得相同的初速度时掉落地面立即倒下,无法旋转,其他底锥张角的陀螺旋转时间如表2所示。利用测量数据作底锥张角与平均时间的关系图如图6所示。
从表2和图6中可以得到这样的结论:相同旋转半径的陀螺的稳定性与其底锥张角有关;在相同的初速度旋转的陀螺,底锥张角与陀螺旋转时间存在非线性关系,陀螺的旋转时间在底锥张角为130°附近取得最大值。
3 研究结果分析
从所得的数据分析可知,底锥张角能影响陀螺的稳定性,陀螺底锥张角在130°附近时陀螺的稳定性最佳。在相同的速度旋转和相近的转动惯量,陀螺底锥张角的角度越小,陀螺的稳定性越弱。造成这一现象的原因是:在质量相同的情况下,底锥张角越小的陀螺的重心距离地面越高,底锥张角越大的陀螺的重心距离地面越低,如图7所示。
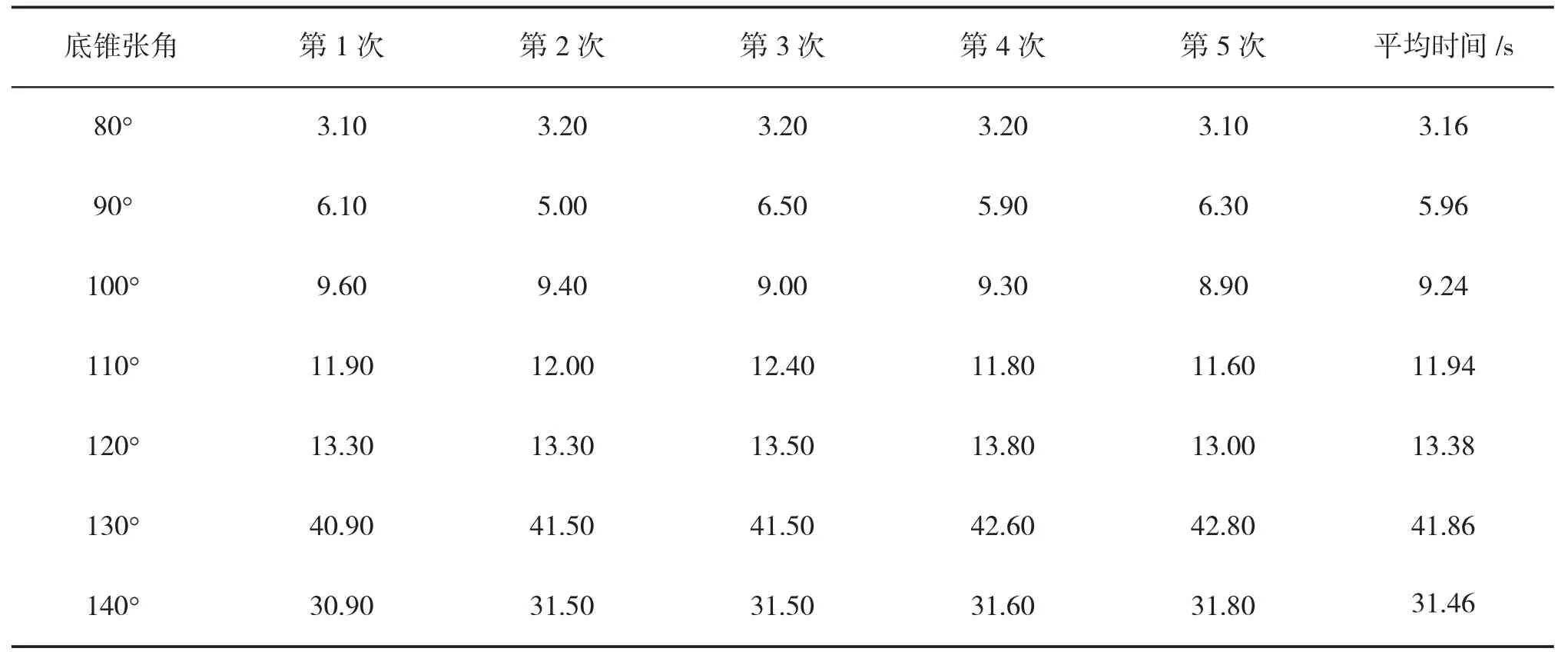
表2 质量相同底锥张角不同的陀螺旋转时间陀螺初速度100r/min
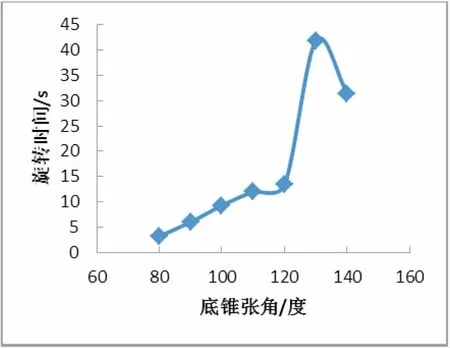
图6 底锥张角——平均时间关系图
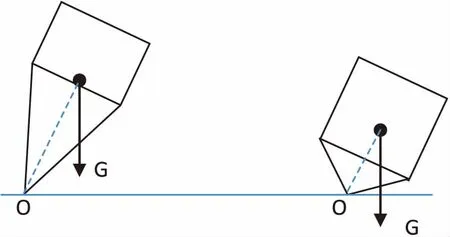
图7 陀螺重心位置示意图
根据陀螺运动原理,当其转速不足时,陀螺将会出现摆动,这时底锥张角小的陀螺的重力矩大于底锥张角大的陀螺的重力矩,所以底锥张角小的陀螺容易翻倒。而底锥张角过大,陀螺旋转时间也会减少,虽然它们的重心距离地面的高度低,重力矩影响较小,但是这个底锥张角的陀螺,与地面接触面积大,压力的作用效果不明显,陀螺可以在地面四处游动,除了要克服转动过程中的摩擦力做功之外,还要克服平移时的摩擦力做功,损耗更多的动能,使得陀螺旋转的时间减少。陀螺的转动过程中,与地面的任意接触点摩擦力,都可以看作一种滑动摩擦。陀螺底锥张角越大,陀螺与地面的接触面积越大,阻力相对于转动中心的力矩越大,陀螺就越难转动,且一旦陀螺出现摆动,阻力矩的作用就更明显。这也正是文章前言所述“陀螺倒过来,底锥朝上,陀螺几乎不可能靠惯性继续转动”的原因所在。
[1]宋卫.陀螺技术分类与动作结构分析[J].辽宁体育科技,2014(5):101-104.
[2]余刚.少数民族传统体育竞技项目——陀螺技术及特点分析[J].贵州民族学院学报:哲学社会科学版,2009(2):130-132.
[3]胡庆华.陀螺运动技战术变迁与发展研究[J].湖北民族学院学报:哲学社会科学版,2013(5):156-160.
[4]文展.白裤瑶“打陀螺”引入中小学体育教学的意义[J].科技信息:科学教研,2007(27):154+215.
[5]赵波,刘丽蓉.有趣的陀螺运动[J].当代贵州,2010(15):51.
[6]李新刚,袁建平.微机械陀螺的发展现状[J].力学进展,2003(3):17-18+24.
[7]周海波,刘建业,赖际舟,等.光纤陀螺仪的发展现状[J].南京航空航天大学,2005(6):1-3.
[8]李博,杨拥军,徐永青,等.一种集成式硅 MEMS 振动陀螺仪[J].中国电子科技集团公司,2013(8):501-505.
