脉冲星导航系统的星历表误差RKF校正算法
2017-03-27李晓宇
李晓宇,姜 宇,金 晶,贺 亮,沈 毅
(1.哈尔滨工业大学控制工程系,哈尔滨150001;2.上海航天控制工程研究所,上海200233)
脉冲星导航系统的星历表误差RKF校正算法
李晓宇1,姜 宇1,金 晶1,贺 亮2,沈 毅1
(1.哈尔滨工业大学控制工程系,哈尔滨150001;2.上海航天控制工程研究所,上海200233)
为了减小星历表误差对脉冲星导航系统的影响,本文提出了一种针对星历表误差的RKF(Robust Kalman filter)导航定位方法。通过对星历表误差进行分析,得到星历表误差随时间变化的关系。建立带有星历表误差的量测模型,利用Kalman滤波原理进行计算。在Kalman滤波计算的过程中,星历表误差项是未知的,利用矩阵不等式进行处理,最终确定误差协方差的下界,并计算反馈增益得到最终的状态估计值。将RKF方法与UKF和其他两种处理星历表误差的滤波方法分别在绕飞地球和火星的轨道上进行测试并进行对比分析,实验结果表明,提出的方法可以取得到比UKF和其他两种滤波方法更高的定位精度,有效的减小星历表误差对脉冲星导航系统的影响。
自主导航;脉冲星导航 (XNAV);星历表误差
0 引 言
近年来,X射线脉冲星导航[1]作为一种新兴的自主导航方式,受到越来越多的关注。具有自主性强的特点,可以有效的克服利用地面跟踪导航系统的缺陷,完全胜任各种自主导航探测任务。脉冲星是一种高速旋转的中子星,不断的发出X射线电子束,这种电子束具有周期稳定的,容易辨识的优点。当X射线粒子束扫过某一个平面的时候,星载探测器可以在单位时间记录到达的光子数,形成一个观测轮廓。将脉冲星的观测轮廓和标准轮廓进行对比,可以得到脉冲星光子到达太阳质心与到达航天器的时间差。因此,可以将该时间差作为脉冲星导航系统的观测量,结合轨道动力学模型,根据EKF,UKF和NPF等滤波算法[2-7]得到导航信息。
在绕飞行星探测的过程中,动力学模型是以行星本体质心为惯性坐标系下建立的,而观测模型是建立在SSB坐标系下的。在对观测模型进行坐标转换的过程中,需要用到行星的位置,而行星的位置是由星历表预报提供的。目前广泛使用的DE405星历表[8]是由美国宇航局(NASA)的喷气推进实验室(Jet propulsion laboratory,JPL)于1997年提供的,通过雷达等测量方式,提供行星在太阳系中的位置。由于受到当时测量技术条件的限制,难免会存在误差。在DE405星历表之后,JPL在新的航天任务中通过测量行星位置对星历表进行不断更新,并在2007年发布了新的DE421[9]星历表,与DE405相比,DE421通过最新的观测信息,可以提供更精确的行星位置。尽管通过新的星历表可以获取行星的位置,但由于其他天体摄动仍会对行星产生影响,随着时间的推移,使得行星的位置发生变化,导航系统定位结果存在误差。因此,在脉冲星导航过程中,需要对星历表误差进行分析,并设计相对应的导航算法减小该误差对导航系统的影响。
为了解决星历表误差影响导航精度的问题,利用增广矩阵的ASUKF方法[10]和利用差分量测的TDUKF方法[11]被提出。在文献[10]中,通过对DE405和DE421两种星历表误差的分析证明,由星历表误差引起的系统偏差是缓慢变化的。将该系统偏差增广到动力学模型中,作为导航系统状态向量的一部分,并在滤波的更新阶段补偿量测模型中的偏差。但是,这种ASUKF滤波算法仅适用于绕飞地球的航天器导航过程中。对于其他行星的绕飞情况(例如火星),天体摄动会产生复杂的影响,使得对系统偏差的建模不准确,进而影响导航系统的定位精度。在文献[11]中,利用相邻两个时刻的量测更新进行相减,达到消除观测量中星历表误差的目的。但是两个观测量相减使得系统过程噪声和量测噪声相关,使得新的观测量中噪声增大,对导航精度产生影响。
根据上述分析,本文提出一种针对星历表误差的鲁棒Kalman滤波(Robust Kalman filter,RKF)方法。通过对星历表误差的分析,将星历表误差引起的系统偏差引入到建立的量测模型中,通过滤波计算得到带有系统偏差项的误差协方差,利用矩阵不等式计算系统偏差的下界,并根据系统偏差的下界计算导航系统的反馈增益,对最终的估计状态进行校正。该方法不需要增加系统模型的维度,保证了系统的可观测性。只需要利用当前时刻的观测量,利用矩阵不等式计算系统偏差协方差的界,并对估计结果进行校正,取得较高的定位精度。
本文内容安排如下:第1节阐述星历表误差产生的原因及对脉冲星导航系统的影响进行分析。第2节介绍脉冲星导航系统的轨道动力学模型和量测模型,并提出RKF方法。第3节进行实验仿真分析,验证RKF方法的有效性。第4节给出结论。
1 脉冲星导航星历表误差分析
1.1 脉冲星导航
根据前文中介绍的脉冲星导航原理可知,脉冲星导航的量测量Δt是X射线脉冲星发出的光子到达航天器的时间和太阳质心 (Solarsystem barycenter,SSB)之差,如图1所示。RSC是在SSB坐标系下航天器的位置向量。因此,观测量Δt表示的是航天器位置向量RSC在第i颗脉冲星方向ni上的投影。因此关于时间差Δt的量测量可以表示为:
式中:c代表光速,ni表示脉冲星的方向向量,ni=[cosδisinαicosδicosαisinδi],α和 δ分别代表SSB坐标系下的赤经和赤纬。航天器位置向量RSC可以通过该航天器绕飞的行星位置获得:
式中:r表示航天器相对于行星的位置矢量,rE表示行星相对于SSB的位置,由JPL提供的星历表预报得到。但是,由于测量技术条件的限制以及天体复杂摄动的影响,星历表所提供行星的预报位置和真实位置存在误差,如图1所示。行星位置变为,航天器相对于行星的位置变为,与真实的航天器位置r存在误差。因此,需要分析星历表误差对导航系统的影响。
1.2 星历表误差分析
由于在1997年到2007年之间的航天任务中增加了新的观测手段,并提高了量测的精度,DE421星历表可以获得比DE405星历表更准确的行星位置。表1中给出了DE405和DE421两种星历表在1997年内24小时和1年的误差变化值。
从表中可以看出,地球相对于太阳的位置坐标较准确,误差在较小。但是,火星的位置坐标误差较大,由于其他天体对火星会产生复杂的摄动影响,使得误差增大[9]。

表1 行星星历表平均误差
为了进一步分析星历表误差的变化,本文以两种具有代表性的行星(地球和火星)进行具体分析。图2和图3中分别给出了地球和火星在24小时和一年内的星历表误差随着时间变化关系。随着时间的增加,星历表误差不断增加,长期运行的绕飞航天器,需要考虑星历表误差对导航系统的影响。
根据图1定义星历表误差为:
在图4中,横坐标表示星历表误差ΔrE的值,纵坐标表示导航系统利用UKF滤波方法[12]的误差估计值,所使用的轨道为已知绕飞地球的OPS_5111,其轨道参数、所采用脉冲星参数以及UKF滤波算法的实验条件在第4.1节给出。通过对不同误差值的分析可知,随着误差值ΔrE的增加,UKF算法的估计误差值不断变大,假设ΔrE每增加100米,UKF滤波算法的估计误差会增大150米左右。当星历表误差达到1000米时,UKF的估计误差达到了1500米。由于星历表误差ΔrE的存在,会使得量测残差变大,对导航结果造成影响。因此,需要重新设计相对应的滤波器增益来校正星历表误差对系统的影响。
2 滤波方法
2.1 轨道动力学模型
绕飞行星航天器的轨道动力学模型可以用二体运动方程来表示。在以行星的为中心的惯性坐标系(J2000.0)下,系统的状态向量x为:
式中:r=[x y z]T为航天器相对于行星的位置向量,v=[vxvyvz]T为速度向量。因此,根据二体运动方程,轨道动力学模型可以表示为:
式中:R为行星的半径,μ为行星的引力常数,J2为摄动项系数。
2.2 量测模型
根据脉冲星导航原理可知,系统的量测模型可以表示为:
式中:h(xk) =[h(1)(xk),h(2)(xk),…,h(i)(xk)]T,根据公式(1)的几何关系可知:h(i)(xk) =ni(rk+E,k),E,k代表星历表预报的行星位置,由DE405星历表预报得到。i代表使用脉冲星的数量,在本文中,i=3。
2.3 导航算法
根据第2.1节和第2.2节的介绍,脉冲星导航系统可以写为:
式中:wk为系统噪声矩阵,=Qk。Vk为量测噪声矩阵,,对于公式(7)中给定的导航系统,根据Kalman滤波算法,可以得到:
预测:
更新:
式中:Kk是需要确定的增益矩阵。
进一步展开可得:
最终整理可得:
假设 Pk/k-1的上界为 ∑k/k-1,即:Pk/k-1≤∑k/k-1;则协方差 ∑k/k-1定义为: ∑k/k-1=。将∑k/k-1展开可得:
将式(14)进一步展开可得:
最终整理可得:
式中:Hk=[n3×303×3]T,Bk代表星历表误差。定义误差矩阵为:Bk=[B1,k,B2,k,…,Bi,k]T。其中,Bi,k=niΔrE=ni(rE-)。
假设Pk的上界为∑k,即:Pk≤∑k;则协方差∑
k定义为:进一步整理可得:
当∑k达到上界时,求导可得增益Kk的值。令:,则有:
由于存在大于1的正数ε使得不等式成立:
展开可知:
根据公式(20)和(22)可得:
否则
因此,本文提出的RKF算法流程图如图5所示。预测过程,可以根据式(8)和(13)得到。由于UKF方法中的UT变换对线性化误差具有很好的处理效果。因此,预测阶段的式(8)和(13)可以由文献[12]中的UKF预测阶段代替。更新过程,可以根据式(9)和(17)得到。首先根据式(25)、(26)算出的值,再根据式(18)算出的值,最后根据式(9)和(17)算出最终的估计值和误差协方差。
3 仿真分析
3.1 仿真条件
为了验证本文中所提方法的有效性,本文给出了已知卫星绕飞地球轨道OPS_5111[11]和绕飞火星轨道Mars[12]的轨道参数,如表2所示。在本文中,根据传统脉冲星导航系统的设计方案[2-7],选择三颗脉冲星作为导航系统的观测量,所选脉冲星的观测参数如表3所示。所用的 X射线背景流量为Bx=0.005 ph·cm-2·s-1,探测器面积为 A = 1 m2,观测频度为500秒/次。
对于滤波器仿真输入条件,本文根据脉冲星导航系统的取值方法做如下设置[2-7]:
1)初始误差为:
2)初始误差协方差为:
3)系统噪声协方差为:
4)观测噪声协方差为:
Rk=diag[1092,3252,3402]。滤波中的周期为500秒。由于真实的行星位置无法准确的得到,本文利用DE421星历表提供的行星位置来近似的模拟真实的行星位置,利用DE405星历表在导航滤波过程中预报行星的位置。本文引入均方根误差(Root mean square error,RMSE)作为评价导航滤波算法的定位性能指标,RMSE的定义如下:
式中:Δrk表示第k时刻真实的轨道位置rk与滤波器估计的轨道位置k之间的距离。为了证明RKF方法的有效性,本文通过与RKF和传统UKF以及另外两种ASUKF和TDUKF导航滤波方法的RMSE的值进行对比,对四种滤波算法的性能进行系统的分析和评价。
3.2 仿真结果分析
图6给出了绕飞地球轨道分别利用 UKF,ASUKF,TDUKF和RKF的位置估计误差结果。其中,RKF算法中的调节参数ε=1000。四种算法在1×105s后都可以收敛,但是UKF的估计误差结果明显大于其他三种方法,这表明使用UKF方法不能够消除星历表误差对导航系统的影响。对于其他三种方法,RKF的估计误差精度要明显好于ASUKF和TDUKF方法。这表明,RKF可以更好的解决星历表误差问题。此外,ASUKF方法需要将系统偏差增广到系统状态中,增大了系统的维度,会使得系统的稳定性受到影响。对于TDUKF方法,由于需要用到两个相邻时刻的观测量,增大了脉冲星导航系统的存储空间。因此,本文提出的RKF方法可以克服上述缺点,满足复杂航天任务的需要。
为了进一步证明本文提出方法的有效性,本文给出了4种算法在绕飞火星轨道的滤波结果,RKF算法中的调节参数 ε=100。如图7所示。由于DE405星历表预报火星位置的误差较大,四种方法的估计误差都有增大,但是UKF方法的估计误差结果明显比ASUKF,TDUKF和RKF的误差大。为了展示ASUKF,TDUKF,RKF的估计误差的细节,将图7放大。由于绕飞火星轨道的周期较短,三种滤波算法经过5×104秒后开始收敛。但是ASUKF和TDUKF仍然要比本文中的RKF算法的估计误差大。因此,在星历表误差较大的情况下,RKF方法仍然可以有效地解决星历表误差对导航系统的影响。
表2中给出了UKF和RKF在两条轨道中的位置误差估计结果,对于轨道1,本文所选择的稳定区间为1×105秒到6×105秒,从表中可知,UKF的位置误差估计结果明显高于ASUKF,TDUKF和RKF。其他三种滤波方法的定位精度分别提高了61.7%,64.1%,67.4%。对于轨道2,本文中选择的稳定区间为5×104到2.5×105秒,三种滤波方法的定位精度分别提高了96.6%,97.5%和98.3%。这是由于在UKF计算的过程中,星历表的误差会使得量测残差增大,使得系统的导航精度降低。在轨道2中,星历表误差增大到5×104m左右,使得UKF滤波过程中的量测残差急剧的增大,进而导致UKF的估计误差增大。而对于ASUKF方法,虽然通过分析设定系统偏差,但是由于小行星带产生的复杂摄动影响,使得系统偏差的模型不准确,导致ASUKF估计误差变大。在TDUKF方法中,虽然相邻时刻的星历表误差变化不大,可以利用观测量差分将星历表误差消除,但是差分会增加量测方程的噪声,使得TDUKF的误差变大。而本文提出的RKF方法,通过量测残差确定出星历表误差引起的系统偏差的下界,并通过设计反馈增益及时对估计结果进行校正,最终减小星历表误差对导航系统的影响。
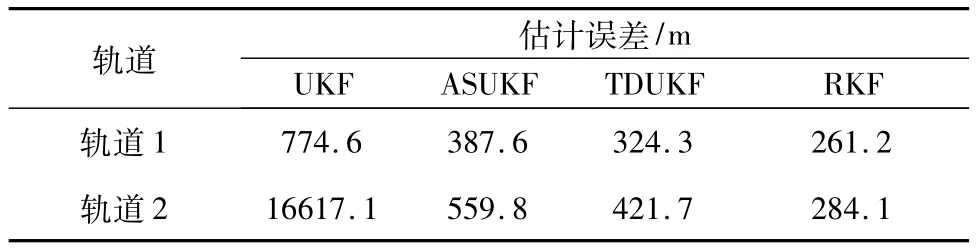
表2 四种方法的估计误差Table 2 Estimation error for four methods
由于本文中真实的星历表数据是由DE421星历表提供的,而DE421星历表提供的和真实的星历表数据仍然存在一定的误差。为了证明在真实条件下,RKF方法仍然有效,本文给出在不同的星历表误差下,四种方法的导航性能曲线,如图8所示。随着星历表误差的增加,UKF的估计误差急剧增大,而其他三种算法,估计误差值较小。ASUKF,TDUKF,RKF三种方法都可以消除星历表误差对导航系统的影响。其中,RKF的方法可以取得比ASUKF和TDUKF方法更高的定位精度。实验结果表明,在不同星历表误差下,RKF算法仍然可以得到更好的定位效果并有效减小星历表误差对导航系统的影响。即使DE421星历表的近似行星位置和真实行星位置有误差,本文提出的RKF方法,仍然可以通过真实的观测量计算量测残差,并利用不等式准确计算出系统偏差的下界,校正星历表误差对导航系统的影响。

表3 轨道参数Table 3 Parameters of orbit

表4 脉冲星参数Table 4 Parameters of pulsars
为了进一步体现所提RKF方法的有效性,本文给出了RKF滤波算法中星历表估计误差的评价指标。根据公式(23)中给出的推导公式,定义星历表估计误差协方差评价指标为:
4 结 论
本文提出一种针对星历表误差的RKF导航滤波方法,该方法通过分析星历表误差对导航系统的影响,建立带有星历表误差的量测模型。根据量测残差和矩阵不等式设计导航滤波器的增益,及时校正最终的状态估计值。与UKF,ASUKF,TDUKF方法相比,RKF方法可以有效的消除星历表误差对导航系统的影响。本文中所提出的方法适用于绕飞行星探测的自主导航,具有较高的定位精度。
[1] 帅平,陈绍龙,吴一帆,等.X射线脉冲星导航原理[J].宇航学报,2007,28(6):1538-1543.[Shuai Ping,Chen Shaolong,Wu Yi-fan,et al.Navigation principles using X-ray pulsar[J].Journal of Astronautics,2007,28(6):1538-1543.]
[2] Liu J,Fang J C,Ma X,et al.X-ray pulsar/starlight Doppler integrated navigation for formation flight with ephemerides errors[J].IEEE Aerospace and Electronic Systems Magazine,2015,30(3):30-39.
[3] 乔黎,刘建业,郑广楼,等.XNAV算法及其整周模糊度确定方法研究[J].宇航学报,2009,30(4):1460-1465.[Qiao Li,Liu Jian-ye,Zheng Guang-lou,et al.Development of XNAV algorithm and cycle ambiguity resolution[J].Journal of Astronautics,2009,30(4):1460-1465.]
[4] Liu J,Ma J,Tian J W,et al.X-ray pulsar navigation method for spacecraft with pulsar direction error[J].Advances in Space Research,2010,46(11):1409-1417.
[5] Feng D Z,Guo H H,Wang X,et al.Autonomous orbit determination and its error analysis for deep space using X-ray pulsar[J].Aerospace Science and Technology,2014,32(1): 35-41.
[6] Liu J,Kang Z W,White P,et al.Doppler/XNAV-integrated navigation system using small-area X-ray sensor[J].IET Radar,Sonar&Navigation,2011,5(9):1010-1017.
[7] 金晶,王敏,黄良伟,等.NPF算法在X射线脉冲星导航中的应用研究[J].宇航学报,2015,36(11):1248-1254.[Jin Jing,Wang Min,Huang Liang-wei,et al.Study on the application of NPF algorithm in the X-ray pulsar navigation[J].Journal of Astronautics,2015,36(11):1248-1254.]
[8] Standish E M.An approximation to the errors in the planetary ephemerides of the astronomical almanac[J].Astronomy&Astrophysics,2004,417(3):1165-1171.
[9] Folkner W M,Williams J G,Boggs D H.The planetary and lunar ephemeris DE 421[R].Folkner W M,California: California institute of Technology,August,2009.
[10] Wang Y D,Zheng W,Sun S M,et al.X-ray pulsar-based navigation system with the errors in the planetary ephemerides for Earth-orbiting satellite[J].Advances in Space Research,2013,51(12):2394-2404.
[11] Wang Y D,Zheng W,Sun S M,et al.X-ray pulsar-based navigation using time-differenced measurement[J].Aerospace Science and Technology,2014,36:27-35.
[12] Xiong K,Zhang H Y,Chan C W.Performance evaluation of UKF-based nonlinear filtering[J].Automatica,2006,42(2): 261-270.
[13] Wei E,Jin S,Zhang Q,et al.Autonomous navigation of Mars probe using X-ray pulsars:modeling and results[J].Advances in Space Research,2013,51(5):849-857.
通信地址:黑龙江省哈尔滨市南岗区西大直街92号哈工大主楼602(150001)
电话:(0451)86413411-8602
E-mail:xiaoyuli@hit.edu.cn
金 晶(1980-),女,博士,副教授,主要从事信号处理及导航方法研究。本文通信作者。
通信地址:黑龙江省哈尔滨市南岗区西大直街92号哈工大主楼619(150001)
电话:(0451)86413411-8602
E-mail:jinjinghit@hit.edu.cn
(编辑:张宇平)
RKF Method for Pulsar Based Navigation with Emphasis Error Correction
LI Xiao-yu1,JIANG Yu1,JIN Jing1,HE Liang2,SHEN Yi1
(1.Dept.Control Engineering,Harbin Institute of Technology,Harbin 150001,China 2.Shanghai Aerospace Control Technology Institute,Shanghai 200233,China)
In order to reduce the influence of the emphasis error to the X-ray pulsar navigation system performance,a RKF based method for dealing the emphasis error is proposed.Through analyzing the emphasis error,the relationship between emphasis error and time is obtained.The measurement model with emphasis error is established and calculated with the principle of Kalman filter.The estimation error covariance is dealing with the matrix inequality due to the emphasis error is contained in the estimation error covariance.The proposed RKF method is tested on the Earth and Mars rotation orbit and compared with UKF and other filtering method which can deal with the emphasis error.The simulation results shows the proposed method can achieve higher positioning accuracy than UKF and the other two filtering methods,the RKF based method can greatly reduce the impact of emphasis error for XNAV.
Autonomous navigation;X-ray pulsar based navigation(XNAV);Emphasis error
V448.25+3
A
1000-1328(2017)01-0026-08
10.3873/j.issn.1000-1328.2017.01.004
李晓宇(1984-),男,博士生,主要从事X射线脉冲星信号处理及导航方法研究。
2016-06-03;
2016-10-27
中国航天科技集团-哈尔滨工业大学联合技术创新中心创新基金(CASC-HIT15-1C04)
