基于规则库的航路飞行冲突探测与解脱
2017-03-08王凯,隋东,胡京
王 凯,隋 东,胡 京
(南京航空航天大学 民航学院,空管运行与安全研究实验室,南京211106)
基于规则库的航路飞行冲突探测与解脱
王 凯,隋 东,胡 京
(南京航空航天大学 民航学院,空管运行与安全研究实验室,南京211106)
通过对国内某航路管制单位的冲突探测与解脱数据收集和数据分析,形成贴合实际运行的航路管制规则库,采用基于BADA(Base of Aircraft data,一种由欧洲空管开发维护并应用比较成熟的飞行性能模型)的轨迹生成算法,通过实地调研和数据收集,结合实际管制运行中的航路冲突标准,建立双机基于管制规则库和决策树的航路冲突探测与解脱模型.选取国内A593航路,使用JAVA语言完成了仿真系统开发, 并导入飞行计划数据实现了实例验证.最终的仿真结果表明模型成功解脱常见航路冲突,保证了与实际航路管制运行的一致性.
空中交通管制;区域管制;BADA;轨迹预测;冲突探测与解脱;决策树模型
快速增涨的空中交通需求给了空中交通系统巨大压力,国内主要机场、航路航线和繁忙地区的空域扇区在容量方面到达一个瓶颈.而且,管制员在如此高的空中交通压力之下也表现出了有限的认知能力.因为空中交通的愈发拥堵,管制员的工作负荷在不断增加,空中交通安全水平也在不断下降,致使航空器之间损失间隔,发生冲突的概率增大.为了解决提前预判和快速解决航空器之间发生冲突的问题,航空器的冲突探测与解脱技术被广泛应用于决策支持系统.决策支持系统在一定程度上不能替代管制员,但是可以辅助管制员在轨迹预测、冲突探测和冲突解脱等方面做出决策.
1 研究现状
空中交通管制系统关于决策支持系统的分类方法有很多种.部分决策支持系统是依据所使用的空中交通管制单元分类的,如航路管制单元,进近管制单元和机场管制单元.另一种分类方法是依据决策支持系统的功能进行分类,如冲突探测与告警,冲突解脱,排序和交通复杂度和密度测量等等.此外,还有部分系统是依据自动化程度进行分类,如自动冲突探测,自动冲突探测与解脱实验,自动冲突探测和解脱建议等等[1-2].此系统按照规划时间的长度可以划分为长期、中期和短期决策支持系统[3].同时,部分系统是基于航空器座舱的,部分是基于地面的,或者两者混合.
在航路冲突探测与解脱方面,国内外研究人员也已经取得了部分研究成果.2008年土耳其Anadolu大学的Metin O ¨ zgu¨ r 和Aydan Cavcar基于管制员规则库,开发了一项辅助航路管制员进行航路冲突探测与解脱的的决策支持工具,尽管冲突解脱部分也采用了基于决策树的模型算法,但是其规则库的建立并未依据实际的航路冲突探测与解脱,算法得出的最后结果也没有在仿真系统中得以验证[4].2011年美国Southern Illinois大学的Xin W. Chen等人从航路网络复杂度的角度对航路冲突探测与解脱进行了研究[5],同年美国加利福尼亚大学的A·Alaeddini 和 H·Erzberger等人研究了在二维平面内航空器无冲突航路飞行的问题,构建了针对双机甚至多机的分布式自动冲突解脱算法,然而算法的构建是在自由飞行的前提条件下,因此对于我国航路飞行冲突探测与解脱技术的研究只有有限的参考价值[6].美国NASA Ames 研究中心的Russell A·Paielli在2008年提出了计算航路飞行航空器未来2 min内发生冲突的垂直解脱方案的算法,主要讨论了冲突解脱时高度调配方法的使用[7].2011年,Russell A Paielli通过102组历史飞行冲突数据对若干航路冲突解脱算法的进行了仿真测试,测试结果证明了算法对于航路冲突解脱的有效性.国内方面,2011年中国民航大学的赵嶷飞针对模拟航路管制员调配冲突边界不一致和调配方案不适用的问题,对航路冲突进行了重新分类,建立对应的冲突解脱方案,然而在对冲突分类和解脱的过程并未参考实际航路管制条件约束,最后也只是从理论上对算法进行了验证[8].中国民航飞行学院的李平在2014年利用Voronoi图与 Delaunay 图的冲突探测算法和基于Prandini的冲突探测算法完成了冲突探测,并对探测时航空器轨迹进行了优化,最后采用指派算法和遗传算法规划出新的无冲突航迹进行冲突解脱,但未具体说明冲突解脱时航空器采取的具体机动方法[9].
本文从实际运行的角度出发,依据我国航路管制的运行现状,通过调研和收集航路冲突探测标准和冲突解脱方法,提取运行中的管制规则,然后依据决策树方法构建冲突解脱规则库,将理论与实际相结合,最后导入实际飞行计划数据验证了航路冲突探测与解脱算法的可行性和准确性,最终形成基于我国实际航路管制运行的冲突探测与解脱模型.
2 管制规则库的建立
管制规则是管制员调配航空器的基本准则,也是探测与解脱航空器之间冲突的主要依据.论文通过在一线航路管制单位的调研和对航路管制员的调查统计,验证了冲突分类结果与实际航路管制冲突类型的一致性;同时收集和整理了实际航路管制工作中所有类型冲突判断的标准;整合出了对应类型冲突在实际航路管制中的解脱方法,最终成功构建了基于实际管制运行的航路管制规则库,为下一步航路冲突探测与解脱决策树的建立提供了基础保证.
2.1 假设条件
冲突探测与解脱算法是在仿真环境中验证的,为了保证冲突探测和解脱算法的有效性,突出基于实际管制运行的特点,在建立航路冲突解脱规则库之前,做如下假设:
1)航空器被视为具有方向性的质点;
2)不考虑航空器航路管制移交;
3)不考虑其他航空器对需要探测和解脱双机的影响;
4)不考虑紧急情况;
5)不考虑军事空域的限制;
6)不考虑军事活动和通航活动影响.
2.2 航路冲突分类
关于冲突的分类,根据航空器活动范围可以将冲突划分为终端区冲突和航路冲突两种冲突类型;根据航空器飞行状态可以将冲突划分为航空器在爬升、下降和巡航中的冲突;根据航空器之前的航向关系,可以将冲突划分为同向航迹、逆向航迹和交叉航迹三种类型.因为航路飞行中的航空器大部分属于沿航路飞行巡航状态,航空器之间的冲突表现为高度的穿越,前后和侧向间隔的不足等等,因此论文采用依据航向关系对航路上航空器的冲突进行分类.具体冲突类型如下:
1)同向航迹:同航迹(Same Tracks)是指航空器的航迹相同时,航迹平行或航迹差小于45°或大于315°并且两航迹之间小于规定的横向间隔时的飞行航迹,
2)逆向航迹:逆向航迹(Reciprocal Tracks)是指航空器沿相同航迹的相反方向飞行、小于规定的间隔的平行航迹的相反方向飞行、航迹差在135°~225°之间而且小于规定的间隔飞行时的飞行航迹.
3)交叉航迹:交叉航迹(Crossing Tracks)是指航空器的航迹差介于45°~135°之间,或者航迹差介于225°~315°之间的飞行航迹.
为了对航路冲突进一步细化和分类,除了考虑航空器之间的航向关系,航空器的飞行状态(爬升,平飞和下降),航空器之间距离和航空器的速度等都是需要考虑的因素.
2.3 航路冲突探测与解脱
由实际航路管制运行可知,航路管制员在实际的航路管制工作中,影响其冲突探测与解脱的因素包括航空器航行诸元(高度、速度和航向)、航空器飞行状态(上升、平飞和下降)、航空器性能(爬升和下降能力)和航空器之间的相对位置关系(两机水平距离和垂直距离)等.
在冲突探测阶段,首先判断航空器之间的航向关系,通过构建航空器模型预测出航空器在未来nmin内的飞行轨迹,然后通过预测出的飞行轨迹计算出航空器之间的垂直间隔和纵向间隔,并与标准安全间隔作比较,判断航空器之间未来是否会发生冲突.如果判断出无冲突,对航空器保持监控状态,如果判断出有冲突,则进入冲突解脱阶段.
在冲突解脱阶段,因为航路飞行主要以航空器沿航路巡航飞行为主,且空域限制等原因,民航航路冲突中,较少考虑航空器航向的改变.因此,针对航路飞行冲突,主要采取调整航空器速度和航空器高度的冲突解脱方法.若航空器之间航向关系不同,则冲突解脱过程参考的中间参数不同.如在同向航迹冲突和逆向航迹冲突中,要考虑的因素包括两机实时水平距离d,两机的实时爬升下降率ROCD1和ROCD2,未来nmin(通过对实际航路管制员调研统计,仿真中n取5 min)后两机水平距离D和两机垂直高度差ΔH;在交叉航迹冲突中,要考虑的因素还包括两机距离交叉点的距离l1和l2.
以均在爬升的两机同向航迹冲突为例:首先依据两机航向关系,确定两机为同向航迹关系,取5 min后两机水平距离D和两机垂直高度差ΔH,如图1所示,若D和ΔH均小于冲突标准值,表示探测出冲突.

图1 同向航迹两机水平位置关系图
同时应用追击问题计算方法得出中间参数t1和t2,其中t1表示后机减速到前机速度时两机间隔恰好满足安全水平间隔所需时间,t2表示后机减速到前机速度时所需时间.计算公式如下:
d-30=(v1-v2)t1+12at12
(1)
v1-v2a=t2
(2)
其中:v1表示航空器1的速度,v2表示航空器2的速度,a表示航空器1的减速度.因此,可以判断得出:
当0 当t1 当t2>5时,表示通过调速已经无法解脱冲突,只能通过调整高度解脱冲突. 如图2所示,图2中的虚线轨迹表示两机冲突时的飞行计划轨迹,实线轨迹表示两机冲突时的冲突解脱轨迹. 图2 同向航迹冲突解脱过程示意图 通过调整高度解脱冲突的过程中,需要进一步根据两机的飞行状态对冲突进行解脱.上述例子中两机均处在爬升状态,因此最终的解脱方案可以描述为:低高度航空器爬升到高高度航空器的下一高度层. 3.1 决策树 在20世纪70年代后期和80年代初期,机器学习研究者J·Ross Quinlan开发了决策树算法,称作ID3(Iterative Dichotomister,迭代的二分器).Quinlan后来提出了C4.5(ID3的后继),成为新的监督学习算法的性能比较基准.1984年几位统计学家出版了分类与回归树(CART),介绍了二叉决策树的产生.ID3,C4.5和CART都采用贪婪算法(即非回溯的),其中决策树以自顶向下递归的分治方式构造[10-11]. 决策树是一种实现分治策略的层次数据结构.它是一种有效的非参数学习方法,可以用于分类和回归,即可以分别构造分类树(classification tree)和回归树(regression tree).决策树的优点之一是它的可解释性(interpretability):决策树节点中的条件简单、易于理解.从树根到树叶的每条路径对应于条件的合集,这是因为为到达树叶,所有这些条件都必须满足.这些路径可以用IF-THEN规则集表示,称作规则库(rule base).其中,C4.5是此类方法之一[12]. 基于决策树是一种层次数据结构和具有较强可解释性的特点,航路管制员探测和解脱飞行冲突的过程可以描述成:管制员通过对飞行冲突类别的判断,参考管制场景中影响冲突解脱因素,调用冲突解脱规则库,生成最后的冲突解脱方法.因此,将航路管制员这一系列行为融合到决策树当中,即可以实现基于决策树的航路冲突探测与解脱流程.因此,在建立决策树模型之前,必须对航路飞行冲突进行合理分类,全面考虑影响管制员解脱冲突的各种因素,建立符合实际管制运行的航路冲突探测与解脱流程. 3.2 决策树生成 决策树是一种实现分治策略的层次数据结构,同时它提供了一种展示在各种条件下会得到对应结果的规则方法,可以生成易理解规则,清晰地显示处理结果,而航路冲突的分类为决策树生根节点生成分支提供了依据.因此可以通过构造分类树(classification tree)来实现两架航空器之间的冲突探测与解脱.依据之前对两架航空器之间冲突的分类,参考实际航路管制冲突判断的标准,应用实际管制解脱方法,即可生成完整的两机航路冲突探测与解脱决策树.两机同向航迹冲突探测与解脱的决策树如图3. 决策树包含的参数说明如表1所示. 表1 决策树参数说明 参数符号含义v1航空器1的速度v2航空器2的速度H1航空器1的高度H2航空器2的高度D5分钟后两机的水平距离d实时两机水平距离t1后机减速到前机速度时两机间隔恰好满足安全水平间隔所需时间t2后机减速到前机速度时所需时间 图3 同向航迹冲突探测与解脱的决策树 4.1 航空器轨迹预测模型 准确的航空器轨迹预测是冲突探测的重要保证,论文建立了基于BADA的航空器轨迹预测模型.BADA(base of aircraft data)是一组以美国资讯交换标准码组成的资料,包含399种机型航空器有关操作性能参数及航空公司程序参数等数据.参考BADA里的航空器推力模型,气动模型和燃油消耗模型,构建了航空器动力学模型和运动学模型.通过引入航空器实际飞行计划数据,构建航空器意图模型,结合航空器动力学模型和运动学模型,构建了基于飞行计划的航空器轨迹预测模型.轨迹预测流程如图4. 图4 基于飞行计划的轨迹预测流程图 4.2 仿真系统构建 仿真系统构建主要包括了仿真背景构建、仿真数据库构建和仿真系统开发.算法验证过程中,选取了国内A593航路作为仿真背景,同时提取2013年11月16日A593航路上部分飞行计划数据,截取了飞行计划中航空器航路飞行阶段的部分飞行计划,其中包含的主要飞行计划参数有:航班号,应答机代码,机型,航路飞行阶段的起止航路点,航路飞行高度.同时,在仿真数据库的构建中,利用MySQL数据库构建仿真需要的航空器性能数据库、航路航线数据库、飞行计划数据库和导航数据库.最后,基于程序语言JAVA开发了双机冲突探测与解脱仿真系统. 4.3 仿真结果 仿真结果验证阶段,分别选取航班CXA1121和CXA2341,CSN4561和CXA2886两对冲突航空器对进行实例验证.根据冲突分类规则判断可知,航班CXA1121和CXA2341冲突类型为逆向航迹冲突,航班CSN4561和CXA2886冲突类型为交叉航迹冲突,两种冲突验证结果如下. 4.3.1 逆向航迹冲突验证结果 图5(A)和图5(B)说明了航班CXA1121和CXA2341依据管制规则库实现冲突探测与解脱的过程.其中图5(B)表示两架航空器在安全间隔范围内时提前探测出冲突,通过航向关系判断得知冲突类型为逆向航迹冲突,根据基于管制规则库的决策树模型推断得出冲突解脱方案为高度调配,即航班CXA2341下降高度到2 700 m保持.图5(B)是指航班CXA2341执行调整高度的冲突解脱方案后,两架航空器成功解脱冲突. 图5 逆向航迹冲突探测与解脱过程 从图5(A)和图5(B)可以直观的看到两机逆向航迹冲突探测与解脱过程,为进一步说明两机冲突探测与解脱的可行性和准确性,在仿真过程中,对两机冲突探测与解脱过程中的高度数据做了相应分析,两机的对应的二维和三维高度剖面图如图6所示. 图6(A)是指航班CXA1121和CXA2341发生冲突但未进行冲突解脱时,两机飞行高度随时间变化关系,从图6(A)可以看出,未进行冲突解脱时,两机高度差大部分时间是小于安全高度300 m,随着时间推移,当两机的纵向间隔和侧向间隔一直减小到小于安全间隔,则发生冲突.图6(C)说明了两架航班未进行冲突解脱的空间位置关系,从图6(C)可以看出,在某个时间段内,两架航班的水平间隔和侧向间隔是小于安全间隔的,结合图6(A),可以得出结论:航班CXA1121和CXA2341发生冲突,根据两机航向关系,冲突类型为逆向航迹冲突,与此同时也验证了冲突探测算法的正确性. 图6 逆向航迹冲突解脱轨迹对比图 图6(B)说明了航班CXA1121和CXA2341冲突解脱后两机飞行高度随时间变化关系,可以看出在仿真时间5 min之后,航班CXA2431保持高度平飞,航班CXA1121执行冲突解脱指令下降高度,大约在仿真时间8 min左右,执行冲突解脱指令的航班的CXA1121到达指定高度2 700 m,完成冲突解脱.图6(D)是两机冲突解脱过程的空间位置关系图,从图中可以看出,航班CXA1121和CXA2341在空间上拉开了垂直间隔,成功实现了冲突解脱,验证了冲突解脱算法的正确性. 4.3.2 交叉航迹冲突验证结果 选取航向关系为交叉航迹的航班CSN4561和CXA2886,通过运行仿真系统,两机交叉航迹冲突的探测与解脱演示过程如图7(A)、图7(B)和图7(C)所示.其中图7(A)表示两机在飞行过程中,根据两机的运动趋势,未来有发生冲突的可能.从图7(B)可以看出,根据冲突探测算法探测出两机冲突,并由冲突解脱算法给出冲突解脱指令,即航班CXA2886由速度210 m/s减速到155 m/s.两机执行冲突解脱的调速指令以后,在相遇点拉开水平间隔以解脱冲突如图7(C)所示. 图7 交叉航迹冲突探测与解脱过程 从仿真系统的运行过程可以看出仿真系统实现了两机交叉航迹冲突的探测与解脱,其中解脱方法为调速.通过对两机未解脱冲突和已解脱冲突过程中飞行数据的记录和分析,可以得到图8(A)和图8(B),其中航班CSN4561和CXA2886未进行冲突解脱时两机速度随时间的变化关系如图8(A)所示,而图8(B)则表示两机进行冲突解脱以后两机速度随时间的变化关系.通过图8(A)和图8(B)对比,可以看出两机在探测出冲突后,航班CXA2886执行了冲突解脱方法中的调速方法,最终成功实现两机冲突解脱,验证了仿真系统中冲突探测与解脱算法对交叉航迹冲突的有效性. 图8 交叉航迹冲突解脱前后速度变化图 本文从实际空中交通管制场景出发,通过在一线管制单位的调研和冲突数据收集,完成冲突分类和冲突解脱方法数据整理,建立管制规则库,最后结合机器学习中的决策树算法,构建出基于管制规则库和决策树的冲突探测与解脱算法.通过运行两组有冲突飞行计划数据的验证表明,该算法可以实现基于实际管制运行环境下的冲突探测与解脱,其主要特点有: 1)基于实际管制单位调研和数据收集制定的冲突分类和冲突解脱规则库,保证了算法对于实际飞行计划的有效性,也为后续仿真系统能应用到实际管制工作中奠定基础,使仿真系统具有更强的应用性;2)采用机器学习中的决策树算法,从冲突分类到冲突探测,再到冲突解脱,使冲突探测与解脱整个过程的逻辑思路更清晰,最后生成唯一的冲突解脱方法,使冲突解脱效率更高,确保发生冲突时航空器能够最快解脱冲突,从而保证了飞行安全.同时,该模型在冲突的探测范围和解脱方法上还存在一定的不足,如针对多机冲突的探测解脱以及冲突解脱规则库解脱规则的有限,都需要做进一步研究. [1] BILLINGS C E. Toward a human-centered aircraft automation philosophy [J]. International Journal of Aviation Psychology, 1991, 4(1):61-70. [2] NIJHUIS H. Role of the human in the evolution of ATM (RHEA) [R]. Amsterdam: Final Report, NLR, 2000 [3] KAUPPINEN Conflict detection and resolution [R]. Memphis, TN: FAA/Eurocontrol TIM 6. 1999. [4] CAVCAR A. A knowledge-based conflict resolution tool for en-route air traffic controllers [J]. Aircraft Engineering and Aerospace Technology, 2008, 80(6): 649-656. [5] CHEN X W, LANDRY S J, NOF S Y. A framework of enroute air traffic conflict detection and resolution through complex network analysis [J]. Computers in Industry, 2011, 62(8-9): 787-794. [6] ALAEDDINI A, ERZBERGER H, DUNBAR W. Distributed Logic-Based Conflict Resolution of Multiple Aircraft in Planar En-Route Flight [J]. AIAA Guidance, Navigation, and Control Conference, 2011, 8(11): 59-66. [7] PAIELLI R A.Tactical conflict resolution using vertical maneuvers in en route airspace [J]. Journal of Aircraft, 2008, 45(6): 2111-2119. [8] 赵嶷飞, 李 莉 王红勇. 虚拟仿真环境中的航路冲突调配规则研究[J]. 航空计算技术, 2011, 41(5): 5-8. [9] 李 平. 航路飞行冲突探测与解脱策略研究[D]. 广汉: 中国民用航空飞行学院空中交通管理学院, 2013. [10] HAN J, KAMBER M, 范 明, 等. 数据挖掘[M]. 北京: 机械工业出版社, 2008. 187-189. [11] MITCHELL T M, 曾华军, 张银奎. 机器学习[M]. 北京: 机械工业出版社, 2003. 38-39. [12] ALPAYDIN E, 范 明, 咎红英, 等. 机器学习导论[M]. 北京: 机械工业出版社, 2014. 113-114. Study on route conflict detection and resolution based on rule base WANG Kai, SUI Dong, HU Jing (Air Traffic Control Operation and Safety Research Laboratory, School of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China) This paper put forward an actual route control rule base by collecting and analyzing conflict detection and resolution data from certain domestic area control center. To establish the model of conflict detection and resolution for two aircraft based on rule base and decision tree, this paper used the trajectory generation algorithm which was based on BADA (Base of Aircraft data, a kind of aircraft performance model which is developed and maintained by Europe Control), and finished on-the-spot investigation and data collection, considering the actual operation of Area Control and correspond conflict standard in Area Control. And developed the simulation system coded in Java. Meanwhile, this paper chose the A593 route and imports the flight plan data to verification. The simulation results showed that the algorithm was successful in detecting and resolving the common en route conflicts, and ensure the consistence in the actual operation of area control. air traffic control; area control; BADA; trajectory prediction; conflict detection and resolution; model of decision tree 2015-11-05. 南京航空航天大学研究生创新基地(实验室)开放基金项目(kfjj20150702) 王 凯(1990-),男,硕士,研究方向:管制运行的冲突探测与解脱技术. TP241.3 A 1672-0946(2017)01-0117-08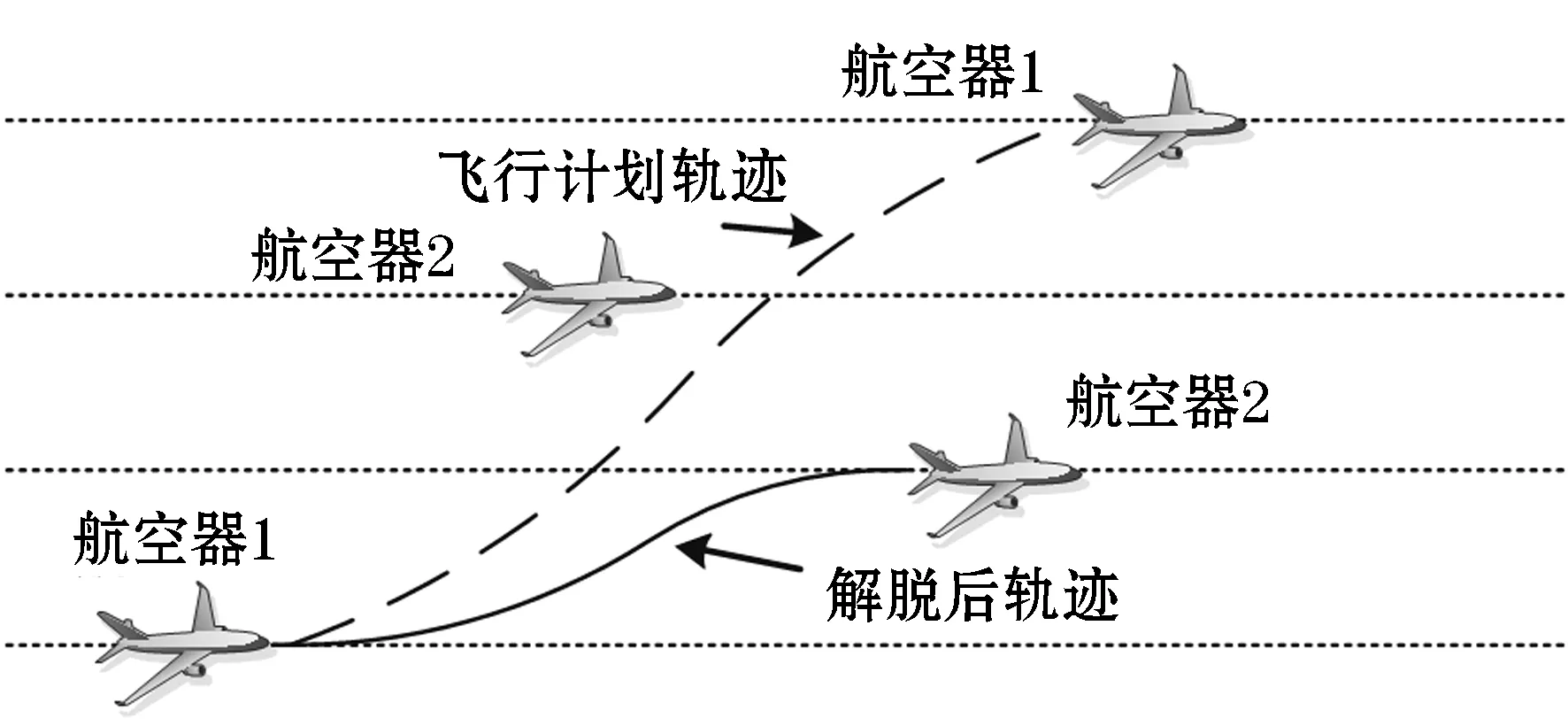
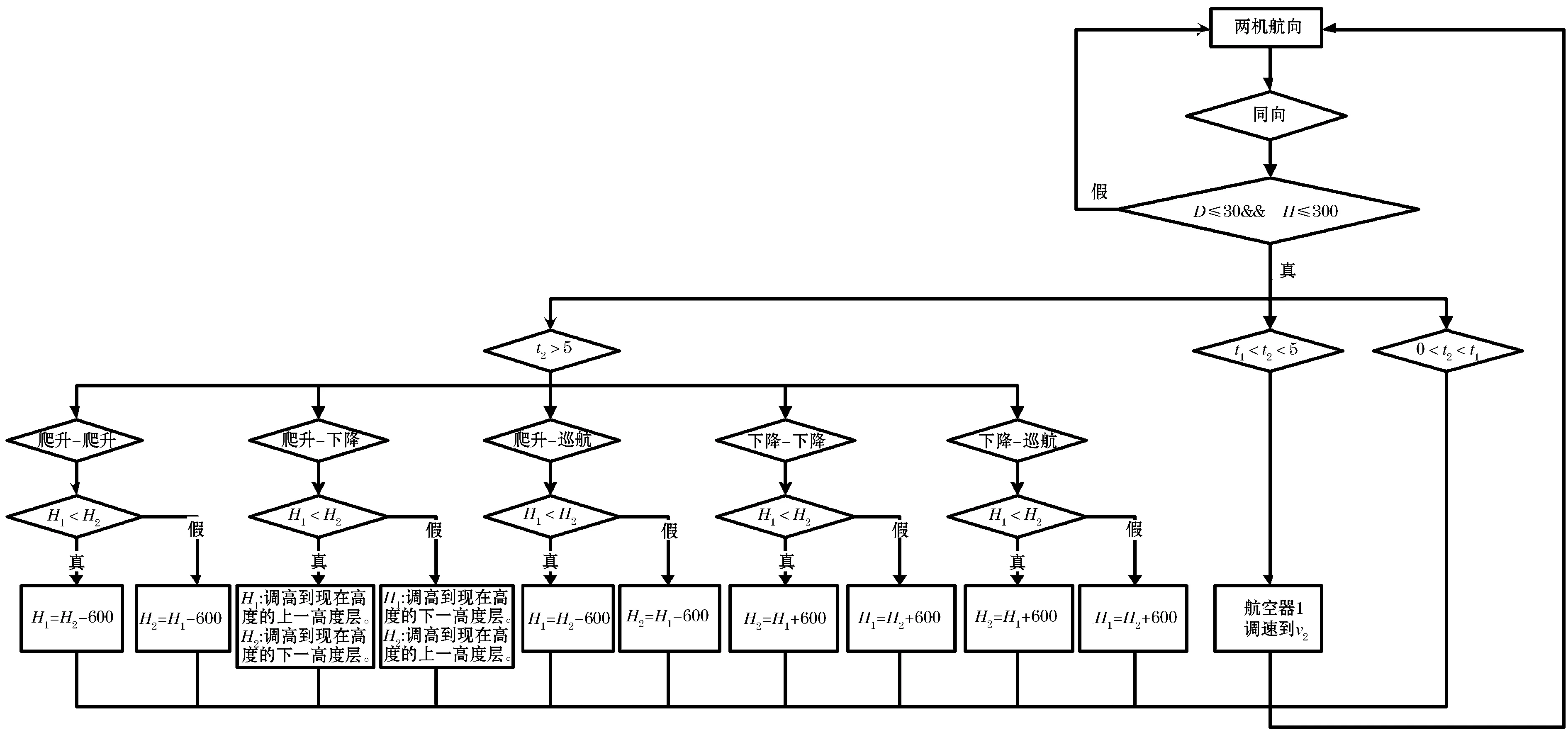
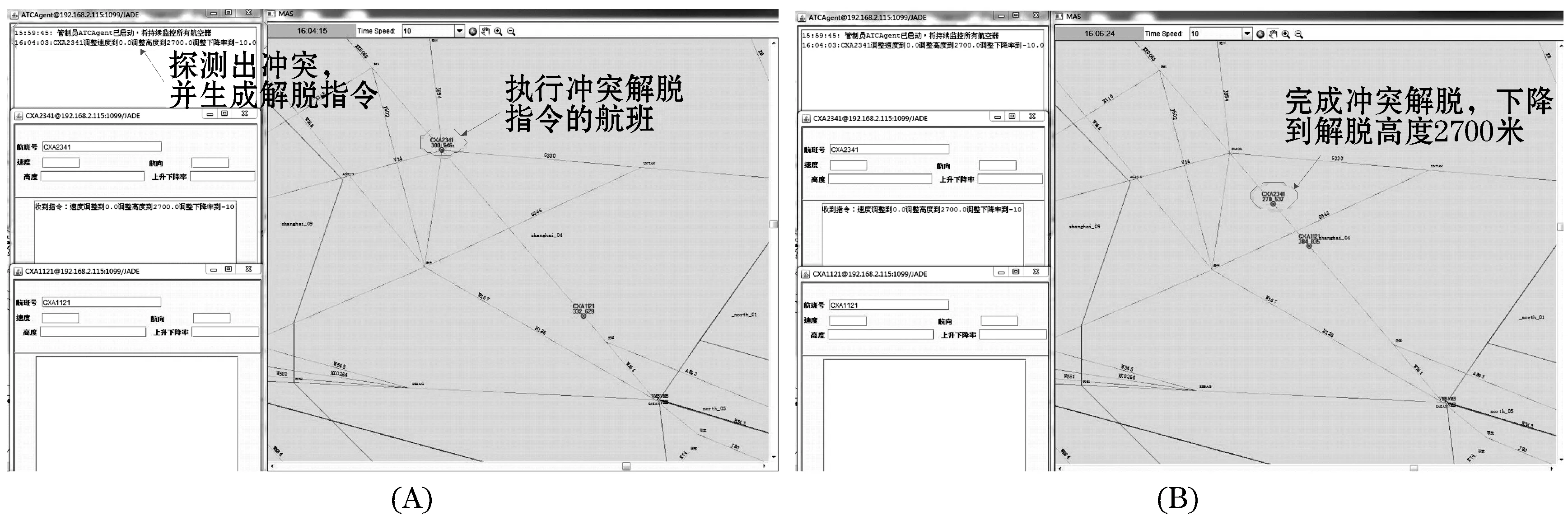
3 决策树

4 仿真验证




5 结 语
