汽油发动机空燃比PID控制及其实验研究
2017-02-15韩旭东张连生张江燕杨大伟
韩旭东,张连生,张江燕,杨大伟
(大连民族大学 机电工程学院,辽宁 大连 116605)
汽油发动机空燃比PID控制及其实验研究
韩旭东,张连生,张江燕,杨大伟
(大连民族大学 机电工程学院,辽宁 大连 116605)
针对汽油发动机气缸进气量变化引起空燃比变化的问题,设计一种基于PID的反馈控制器保证空燃比能够快速恢复到理想值。首先给出一种基于模型的进气量估计算法,在此基础上设计了空燃比前馈控制器;然后将前馈控制与PID反馈控制相结合实现发动机喷油量的调节,利用基于实际实验数据构建的仿真器对提出的算法进行数值仿真研究与分析;最后通过发动机实时控制实验平台验证了控制算法的有效性。
汽油发动机;空燃比;进气量估计;PID控制
汽油发动机的空燃比表示进气量与燃料的混合比。空燃比的控制精度一定程度上决定了发动机的效率和废气排放量[1]。当前,发动机控制研究以提高发动机效率和减少发动机废气排放为主要方向。作为判断发动机性能的重要指标和发动机控制的基本变量[2],空燃比控制在发动机控制研究中是一个重要的问题。
近年来,国内外学者对发动机空燃比控制算法进行了很多研究。比例积分微分(PID)控制方便实现,不需要精确的发动机控制模型,只需要对比例、积分、微分参数进行调节,在工程控制问题中得到了广泛的研究和应用[3]。模型预测控制(Model Predictive Control, MPC)以预测模型为基础,采用二次在线滚动优化性能指标和反馈校正策略来克服受控对象建模误差和结构、参数与环境等不确定性因素的影响[4]。神经网络控制具有自主学习、自动调整参数的功能,但是计算量大,对计算机运算能力要求较高[5]。
本文首先基于发动机运行机理与实验数据,建立发动机进气流量模型,获得了气缸进气量估计算法[6],由此设计了喷油量前馈控制器。在此基础上提出了结合前馈控制的PID反馈控制器。通过数值仿真测试发现,该算法反馈控制参数易于调整并能获得理想空燃比响应性能。利用位于日本东京上智大学联合日本丰田汽车公司建立的发动机实时控制实验室(以下称为“申研究室”)对算法进行了进一步的测试,结果表明在发动机运行工况变化时,控制算法可对空燃比进行有效控制。
1 问题描述
一个四冲程发动机的工作方式可简单描述如下:节气门开度的变化控制空气进入量,然后空气将进入燃烧室与适当燃料混合,该过程称为吸气冲程;通过压缩冲程,气缸的空气燃料混合物被压缩,并在一个适当时间(点火提前角)被点燃;点燃后的燃料发生爆炸,产生的能量会转化为作用于发动机曲轴的扭矩输出,形成做功冲程;最后,在排气冲程将燃烧后的气体排除燃烧室。内燃机是一个涉及许多控制回路的复杂系统,而空燃比作为发动机系统的一个重要参数,其控制是一个重要的回路[7]。通常,利用安装在排气管的氧传感器测量实时空燃比,再将空燃比信号反馈回发动机电子控制单元(Electrical Control Unit, ECU)用于构建空燃比控制算法来修正下一周期的燃油喷射量,如图1。

图1 内燃机控制系统示意图
2 控制器设计
本文提出的空燃比控制系统结构如图2,包括一个前馈控制回路和一个反馈控制回路。

图2 控制系统结构
2.1 前馈控制回路
前馈控制是依据发动机转速ω、节气门开度φ与喷油量计算理论喷油量uff。基于实验数据,通过模型辨识技术获得进气流量的估计[9]

(2)
然后,基于式(1)可得到理论喷油量

(2)齐波夫定律虽然在使用上方便、简单,但在数学推导上存在空白区,致使难以对误差大小进行判断[10]。
(3)
2.2 反馈控制回路
反馈控制回路用于提高控制器瞬态控制性能,通过比较实际空燃比与理想空燃比AFRs得到补偿量Δuf,最终得到喷油指令uf为
uf=uff+Δuf。
(4)
本文重点对反馈控制回路进行设计,利用PID控制原理,通过调节PID参数,完成控制器设计。PID控制是一个在工业控制应用中常见的反馈控制回路,由比例单元P、积分单元I和微分单元D组成。理论上,PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调量;微分控制可加快大惯性系统响应速度,减弱超调趋势。定义空燃比误差信号:e(t)=AFRs-AFR。则控制器的输入信号e(t)与输出Δuf(t)的关系为

(5)
式中,kp代表比例系数,ki代表积分系数,kd代表微分系数。
3 仿真与结果
首先基于日本上智大学申研究室提供的发动机系统仿真器对所设计的控制器进行仿真研究。实验条件为:发动机输出扭矩恒定,调节节气门开度从而引起进气量发生变化,喷油量随着进气量改变而变化,使得空燃比能够迅速恢复到理想状态。在此运行工况下,对于发动机系统有三个输入,分别是节气门开度、发动机负载以及空燃比控制输入量即喷油量。同时,检测发动机转速及发动机空燃比,实现如式(4)的喷油控制 。然后,通过调节PID的三个参数,使得空燃比响应性能达到理想效果。本文PID参数调节的具体方法如下:
(1)加入比例作用。将积分参数和微分参数设置为0,取消积分和微分作用,由小至大调节比例参数,直到系统响应速度变快且有一定超调为止。
(2)加入积分作用。由小到大逐渐增加积分系数,可以看到系统静态误差逐渐减小直到消除。经过反复调试,确定合适的控制参数kp和ki,使得调节时间短且超调量较小。
(3)加入微分作用。由小到大调节微分参数,观察系统超调量和稳定性,同时适当调节比例和积分系数,使得系统超调量和稳态误差达到满意程度。
在对PID控制器系数进行整定时,节气门开度输入信号如图3,节气门在第5,15,25,35 s时发生变化。其中在第5 s和第35 s时节气门开度变大,此时发动机进气量增加;在第15 s和第25 s时节气门开度变小,发动机进气量减少。

图3 节气门开度输入信号
为了对比,首先采用只有式(3)表示的前馈喷油输入量。前馈控制仿真结果如图4,从中可以看出当节气门开度变化时,仅采用理论喷油量,空燃比不能迅速恢复到稳定状态,且由于式(2)中估计值存在的误差,空燃比不能收敛于理想状态。加入反馈控制后的仿真结果如图5-7。图5中曲线为仅采用比例控制时的结果,其中比例系数kp=30。仿真过程显示,随着比例系数不断增加,系统响应时间变短,同时空燃比输出出现超调量。但由该结果可以看出,仅用比例控制时,系统输出存在稳态误差,因而考虑停止增加比例系数并引入积分控制环节。采用PI控制的结果如图6,其中kp=25,ki=35。由该结果可以看出加入积分作用以后,系统稳态误差消除。进一步引入微分控制环节,其仿真结果如图7所示,其中控制器参数选定为kp=21,ki=30,kd=3,此时系统超调量为7.48 %,峰值时间为1.30s,调整时间为1.48s,性能指标满足发动机空燃比控制要求。
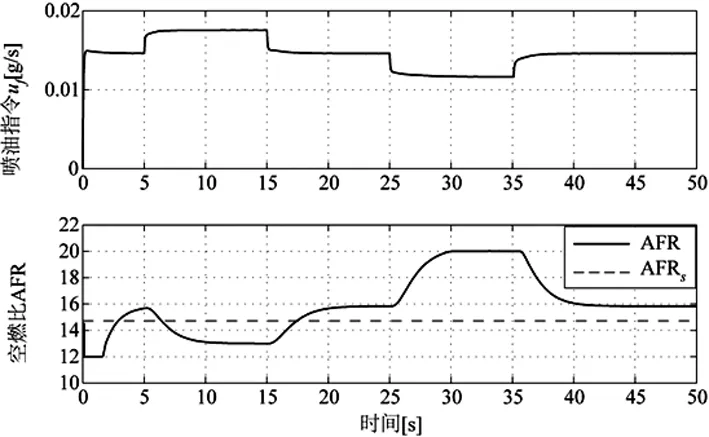
图4 前馈控制仿真结果

图5 比例反馈控制仿真结果

图6 比例积分反馈控制仿真结果
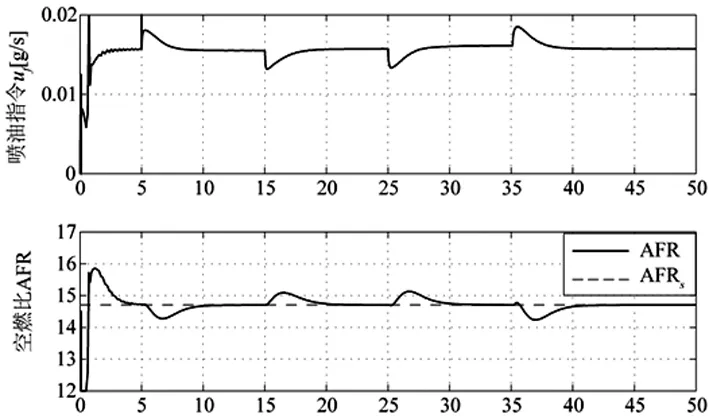
图7 PID反馈控制仿真结果
仿真验证后,利用申研究室的发动机控制实验平台对所提出的控制器进行测试,如图8。该实验平台所用发动机为丰田汽车公司的2GR-FSEV型 6 缸汽油发动机,排量3.5L,最大功率227kW/6 400rpm,最大扭矩377Nm/4 800rpm。这台发动机应用了进、排气门双可变气门正时系统以及可变进气歧管,采用D4-S直喷系统,即每缸两个喷油嘴的设计(一个安置于气缸内,另一个位于进气歧管处)。

图8 发动机实时控制实验台架
该实验平台包含了由dSPACE构建的快速原型控制器,该控制器与发动机ECU通过Bypass相结合用于实现发动机的实时控制。dSPACE实时控制系统融合了MATLAB/Simulink/Real-TimeWorkshop, 并且拥有实时性强、可靠性高、扩充性好等优点。它的硬件系统的处理器具有高速的计算能力,并配备了丰富的I/O支持,同时其软件环境包含实现代码自动生成、下载和试验与调试的整套工具。此外,该实验台架还包含了与发动机相连的低惯性电力测功机用于模拟发动机负载。对仿真测试进行验证,得到实验结果如图9。
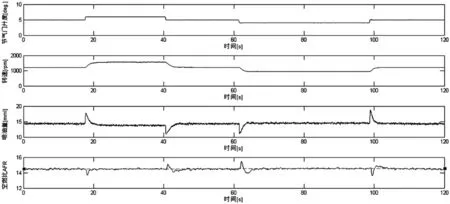
图9 实验验证结果
图中给出了节气门开度、发动机转速、喷油控制输入量以及空燃比的曲线。为了实现实际系统的喷油控制,喷油量换算为以mmL为单位。由实验结果可以看出当节气门开度变大时,发动机转速上升,进气量增加导致空燃比减小;而当节气门开度变小时,发动机转速下降,进气量减少导致空燃比增大。实验结果表明提出的控制器能快速调节喷油量,从而使空燃比迅速恢复到理想状态。
4 结 论
本文针对汽油发动机在进气量变化时空燃比控制的问题,结合基于模型的前馈控制器设计了PID反馈控制器。控制系统前馈控制算法的实现采用了基于机理及实验结合的方法构建系统模型。该模型能够反映发动机主要运行工况的主要特征,
通过发动机系统仿真器进行仿真实验,获得了在节气门发生约14 %的变化量时,空燃比输出满足超调量为7.48 %且调整时间为1.48s的控制器。与前期相关研究[5-6]相比,本文提出的控制算法结构简单且计算量小,在实际应用中易于实现,是提高发动机运行状态性能的一种有效手段。
5 致 谢
本文研究内容是在日本科学振兴机构(JST)发起的“樱花科技计划”项目的资助下实施的。同时,感谢日本上智大学申研究室提供实验平台并感谢申研究室康铭鑫、于开江博士后以及博士研究生张亚辉在研究过程中给予的指导及实验环节中的辅助工作。
[1] 曲玲. 汽车发动机空燃比控制方法的分析与研究[D].哈尔滨:哈尔滨工业大学, 2009.
[2] 刘一鸣,刘伟,花志远,等.基于模糊PID的电喷天然气发动机空燃比控制策略研究[J].内燃机工程,2012,3(33): 14-19.
[3]POSTMAM,NAGAMUNER.Air-fuelratiocontrolofsparkignitionenginesusingaswitchingLPVcontroller[J].IEEETrans.onControlSystemsTechnology, 2012, 20(5): 1171-1187.
[4]POSTMAMJ,NAGAMUNER.LPV-basedAir-fuelratiocontrolofsparkignitionenginesusingtwogainschedulingparameters[C]//ProceedingsoftheASME2010DynamicSystemsandControlConference,Massachusetts:Cambridge, 2010: 665-672.
[5] 孙强,吴黎辉,姚峰,等. 基于神经网络自适应PID的发动机转速控制对策分析[J]. 电子技术与软件工程, 2015, 3:167-168.
[6]JIAOX,SHENT.Lyapunov-Designofadaptiveair-fuelratiocontrolforgasolineenginesbasedonmean-valuemodel[C]//Proceedingsofthe30thChineseControlConference.Yantai, 2011: 6146-6150.
[7] 蒋文科,吕玉江,邝朴生. 汽油发动机空燃比控制系统[J]. 河北科技大学学报,2001,22(3):1-5.
[8] 康铭鑫. 复杂路面条件下汽车牵引力控制算法研究[D].秦皇岛:燕山大学, 2012.
[9]LIF,SHENT,JIAOX.Model-baseddesignapproachforgasolineenginecontrolPartI:modelingandvalidation[C]//Proceedingsofthe32thChineseControlConference.Xi’an, 2013:7774-7779.
(责任编辑 邹永红)
PID Control of Air-fuel Ratio for Gasoline Engine and Its Experimental Validation
HAN Xu-dong, ZHANG Lian-sheng, ZHANG Jiang-yan, YANG Da-wei
(School of Electromechanical Engineering, Dalian Minzu University, Dalian Liaoning 116605, China)
For the problem of air-fuel ratio (AFR) variation caused by the air charge changing in the gasoline engine, a PID-based feedback controller is designed to guarantee that the AFR can converge to the ideal value quickly. First, a model-based air-charge estimation algorithm is proposed. With this estimation, a feedforward controller is designed. Then, the fuel injection regulation is realized by combining the feedforward controller and the PID feedback controller. The performance of the control system is evaluated with a simulator constructed with experimental data. Finally, the control scheme is validated on a real-time engine control test bench.
gasoline Engine; air-fuel ratio; air-charge estimation; PID control
2016-10-11;最后
2016-11-29
樱花科技计划项目(S2016F0322006);中央高校基本科研业务费专项资金资助项目(DC201502010303)。
韩旭东(1993-),男,河北张家口人,大连民族大学机电工程学院硕士研究生,主要从事控制理论及其在汽车动力系统控制中的应用研究。
张江燕(1982-),女,河北石家庄人,讲师,博士,主要从事控制理论及其在汽车动力系统控制中的应用研究,E-mail:zhang-jiangyan@dlnu.edu.cn。
2096-1383(2017)01-0040-04
U
A
