不同微结构的纤毛式MEMS矢量水听器性能研究
2017-01-20简泽明付昌张国军
简泽明付昌张国军
(1.上海船舶电子设备研究所,上海,201108)
(2.中北大学电子测试技术国防科技重点实验室,太原,030051)
不同微结构的纤毛式MEMS矢量水听器性能研究
简泽明1,2付昌1张国军2
(1.上海船舶电子设备研究所,上海,201108)
(2.中北大学电子测试技术国防科技重点实验室,太原,030051)
对三种不同梁厚(40μm,20μm,10μm)的微结构进行了模态和静力分析,并制作了相应的水听器进行灵敏度测试,验证了理论分析的正确性。
MEMS矢量水听器;带宽;灵敏度
MEMS技术是建立在微米/纳米技术(micro/nanotechnology)基础上的21世纪前沿技术,它涉及机械、电子、化学、物理、光学、生物、材料等多学科。MEMS的主要特点有:微型化、智能化、多功能、高度集成以及易于大批量生产[1]。近年来,MEMS技术在水声领域的应用也备受各国专家学者的关注[2],并且研制出了纤毛式的MEMS矢量水听器。一般情况下,纤毛式MEMS矢量水听器与传统的矢量水听器性能比较如表1所示,表明纤毛式MEMS矢量水听器在水声探测中具有良好的应用前景。
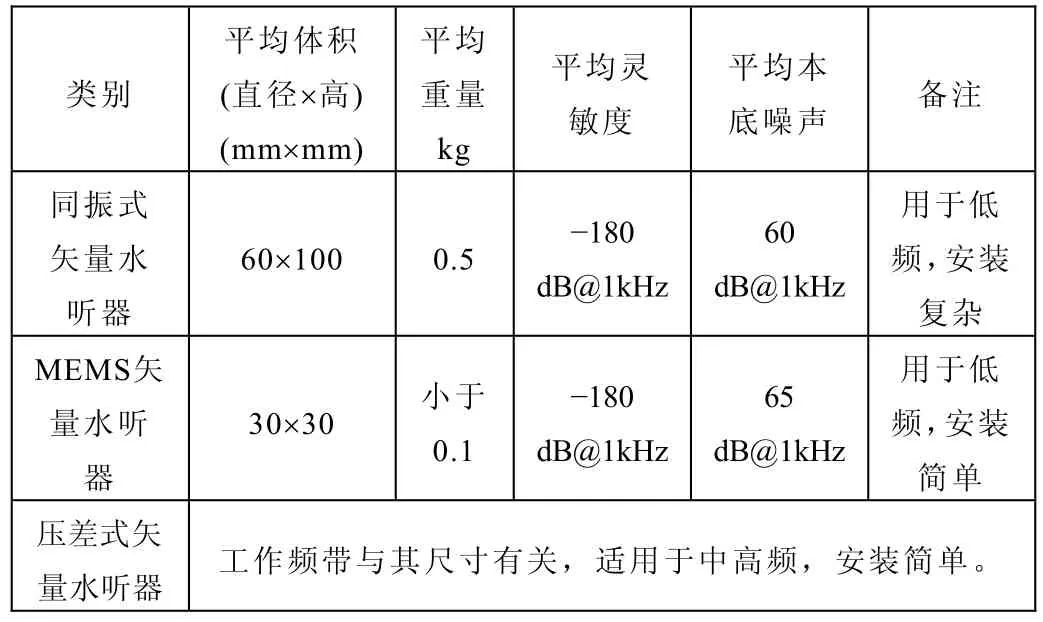
表1 不同类型矢量水听器性能
本文对纤毛式MEMS矢量水听器微结构进行了分析,得出了纤毛式MEMS矢量水听器的带宽和灵敏度之间的关系,并以不同梁厚的水听器为例进行了测试分析,验证了理论分析的正确性。
1 工作原理
纤毛式MEMS仿生矢量水听器微结构模型如图1所示,主要包括四梁臂硅微结构及固定于四梁中心的微柱体(纤毛)。四梁臂硅微结构以SOI为加工材料通过MEMS工艺加工完成。四梁臂上通过扩散工艺加工有八个阻值相等的应变压敏电阻,其中R1~R4和 R5~R8分别连接成对应于X和Y方向的惠斯通电桥。X方向和Y方向梁上电阻的分布如图2所示;用于X方向和Y方向信号检测的惠斯通电桥连接如图3所示。声信号通过水介质作用于刚硬微柱体使其偏斜进而带动压敏电阻感知信号,实现水下声音信号的探测[3]。

图1 微结构模型图

图2 压敏电阻的分布图

图3 惠斯通电桥图
在无应力作用下,(以第一个电桥为例)电桥的输出电压可表示为:

当有声波信号(声压大小为F)作用于微柱体时,悬臂梁发生形变,轴上的压敏电阻阻值发生变化,电桥的输出电压表示为:


对于P型压敏电阻有[4]:

由公式(3)和(4)则有:

微结构的X轴和Y轴的灵敏度可表示为:

其中σmax为微结构上对应的X方向或Y方向上最大应力,Vin为电桥的输入电压(取Vin=10 V)。由式(6)可得,微结构的灵敏度与微结构上的最大应力成正比关系。
2 水听器微结构的力学模型分析
当MEMS矢量水听器微结构的柱体受到X方向的载荷作用力时,微柱体与四梁-中心连接体边框都是刚性的,作为一个整体,整个微结构受力看作为一个纯弯曲,Fx将会在微结构的中心连接体产生绕Y轴的力矩M。由于中心连接体的质量相对于刚硬柱体的质量来说很小,所以在计算中忽略了这一分量。图4为微结构的几何尺寸示意图。建立仿生微结构的力学分析模型,如图5~7所示。其中图5为弹性体承受作用后的变形情况。图6为中心块受力分析图,图7为单根悬臂梁的受力情况。

图4 微结构的几何尺寸示意图

图5 微结构截面承受M的变形图
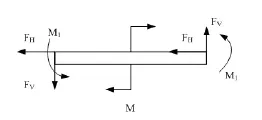
图6 中心连接体受力分析

图7 单根悬臂梁受力分析图

微结构的共振频率为:

其中:L为悬臂梁的长度,b为悬臂梁的宽度,t为悬臂梁的厚度,a为中心连接体的半宽长, h为纤毛的高度,m为纤毛的质量(kg),E为硅材料的弹性模量。
由式(7)、(8)可知,微结构上的最大应力和固有频率随微结构尺寸变化关系如图8所示。
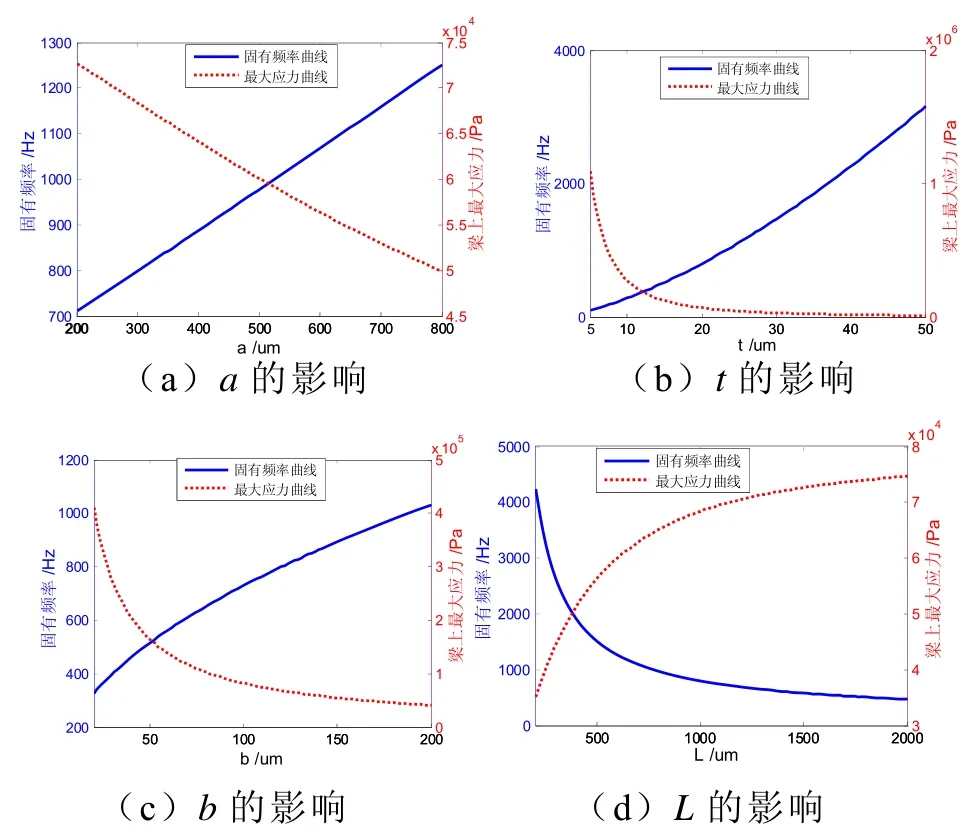
图8 各个尺寸对固有频率和最大应力的影响
从图8中可知纤毛式MEMS矢量水听器带宽与梁的长度成反比,与梁的厚度、宽度及中心连接体半宽长成正比;灵敏度与梁的长度成正比,与梁的厚度、宽度及中心连接体半宽长成反比。
3 微结构有限元仿真分析
以不同梁厚的水听器进行仿真与试验,分别选择三种不同梁厚(10 μm、20 μm、40 μm)的水听器,其它几何尺寸参数如表2所示。采用ANSYS软件建立微结构的有限元模型,然后分别进行模态分析和静力分析。

表2 微结构的几何尺寸参数
梁厚为40 μm的微结构模态分析结果如图9所示,一阶模态为2 367 Hz。同样地可以得到20 μm的一阶模态为880 Hz,10 μm的一阶模态为317 Hz。同时,这与公式(8)得到的比例关系基本一致。
给四个梁的终端加全约束,固定六个自由度。同时沿微柱体Y正方向加1 Pa载荷,通过定义路径,分别得到三种微结构的最大应力为27 637 Pa,109 071 Pa,433 392 Pa。图10为40 μm微结构Y轴上的应力曲线。,这与公式(7)得到的比例关系一致。

图9 梁厚40 μm微结构的一阶模态
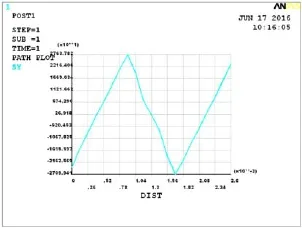
图10 梁厚40 μm微结构的应力曲线
由式(6)得出,10 μm微结构的灵敏度为:

20 μm微结构的灵敏度为:

40 μm微结构的灵敏度为:

4 测试
分别制作这三种不同梁厚的水听器,采用比较校准的方法在驻波桶内对它们进行灵敏度校准实验。驻波桶内的传声介质为硅油。测试频率范围为20 Hz~1 000 Hz,以1/3倍频程为步长选择频率点进行测量。测试时水听器不封装测,测试现场如图11所示。
三种不同梁厚的水听器灵敏度测试结果如图12所示,结果表明梁厚为40 μm、20 μm、10 μm三种水听器的灵敏度依次增加了约10 dB,且梁厚为20 μm、10 μm的水听器分别约在500 Hz和200 Hz出现共振。因此随着梁厚的减小,水听器灵敏度增加,带宽减小,且基本满足公式(7)和公式(8)的比例关系,验证了理论分析的合理性。

图11 测试现场图
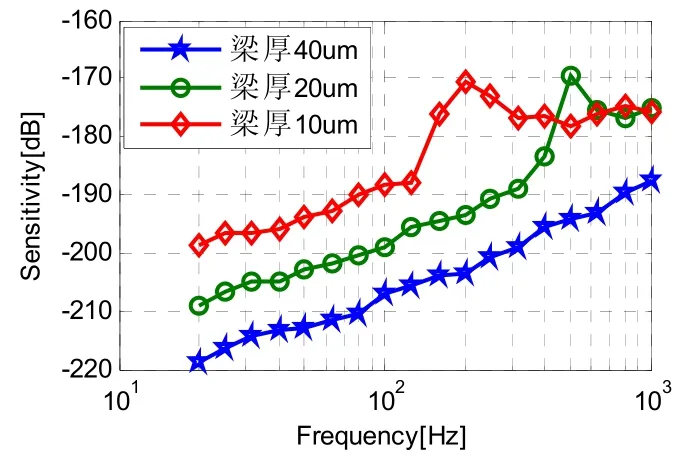
图12 灵敏度测试结果
5 结论
本文分析了微结构尺寸对纤毛式MEMS矢量水听器灵敏度和带宽的影响,并且得到了不同微结构尺寸之间其灵敏度或带宽的比例关系,可为选择不同微结构的纤毛式MEMS矢量水听器以满足其不同的实际应用需求提供了理论依据。
[1]FEDDER G K.Top-down design of MEMS[C].2000 International Conference on Modeling and Simulation of Microsystem,2000:7-10.
[2]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009:2-5.
[3]ZHANG G J,WANG P P,GUAN L G,et al.Improvement of the MEMS bionic vector hydrophone[J].Microelectronics Journal,2011,42(5):815-819.
[4]陈尚.硅微仿生矢量水听器研究[D].中北大学,2008:42-48.

图5 平面八方位补偿前后效果对比

图6 摇摆补偿前后效果对比
从图5、图6中可很明显的看出,补偿后的输出曲线基本上消除了旋翼机转向和摇摆时磁干扰对设备数据的影响。旋翼机自旋一圈转向差信号达50.9 nT,但经过补偿后很好的消掉了,这就保证了旋翼无人机装载的磁力仪在航向发生变化或侧风作业时测量数据的准确可靠。
4 结语
从分析多旋翼无人机磁干扰特征入手,提出了一种适合该机具体条件的补偿方案。要使实际效果满足磁测的要求,除了正确的方案外,还应该注意航磁仪的调试,以及各灵敏元件和补偿线圈的正确安装。在地面做磁补偿虽然比空中操作方便,但地面模拟状态不可能完全等效空中飞行状态,因此,必要的修正补偿是需要的[2]。
整个试验在吴文福研究员精心指导下进行。邓瑞辉、宗发宝、魏震等工程师在软、硬件调试中给予大力支持,在此表示衷心感谢。
参考文献:
[1]TOLLES WALTER E.Magnetic field compensation system:US 2706801[P].1955.
[2]吴文福.“海燕”机航磁仪的补偿方法和结果[J].声学与电子工程,1988,(3):27-32.
[3]吴文福.16项自动磁补偿系统[J].声学与电子工程,1993,(4):14-21.