目标磁异常信号特征分析
2017-01-20伍东凌吕冰陈正想
伍东凌 吕冰 陈正想
(中国船舶重工集团公司第七一〇研究所,宜昌,443003)
目标磁异常信号特征分析
伍东凌 吕冰 陈正想
(中国船舶重工集团公司第七一〇研究所,宜昌,443003)
根据目标磁偶极子等效模型,利用Matlab仿真生成不同探测方向下的目标磁异常信号特征,同时将仿真生成的与同等条件下试验测得的目标磁场信号进行对比,对比结果证明了所采用方法的有效性。
磁异常探测;磁异常信号;磁偶极子模型
由于潜艇等目标主要由具有磁性的金属材料制成,尽管对其进行过消磁处理,但也不可能彻底消除其磁性,而且这些目标长期处于地磁场这个大环境中,不可避免的被地磁场磁化,所以这些目标的存在必然会引起地磁场的局部异常[1,2]。由于磁探仪具有不受传播介质特性的影响、可连续搜索、定位精度高、不受浅海复杂水声环境影响等优点,已成为一种有效的反潜探测设备,在航空反潜中得到广泛应用[3]。本文通过Matlab建模仿真,分析了磁探仪在不同航向下所探测到的目标磁异常信号特征,并开展了同等条件下的目标测试试验。
1 目标磁异常探测等效模型
在一定条件下,所有磁现象均可等效为若干个磁偶极子磁场的叠加,在特定情况下也可以等效为一个磁偶极子。利用磁探仪对目标进行探测时,当探测距离大于磁性目标自身尺寸的2.5倍时,磁性目标可视为一个磁偶极子。对航空探潜而言,一般探测距离均大于潜艇自身的尺寸的2.5倍,因此,在仿真过程中,我们可将被测目标近似看作磁偶极子进行处理[4-6]。考虑到实际开展探测试验时,为了避免平台对磁探仪造成的磁干扰,我们将磁力仪固定安装在地面上,让模拟目标在距离磁探仪一定正横距离下沿不同方向运动,如图1所示。
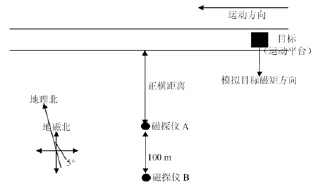
图1 实际探测系统示意图
为了消除地磁日变造成的影响,可采用两套磁探仪对目标进行差分探测,图1中磁探仪A所测得的磁场数据减去磁探仪B所测得的磁场数据即为被测目标的磁场数据。由相对运动可知,当目标由东向西运动时,可看作目标不动,而磁探仪在由西向东运动,且模拟目标的磁矩方向可能为任意方向。
模拟目标的磁矩方位定义为α1,磁探仪探测运动方位定义为α2,利用以下旋转矩阵可将模拟目标三个方向磁矩变换到探测运动方位上。


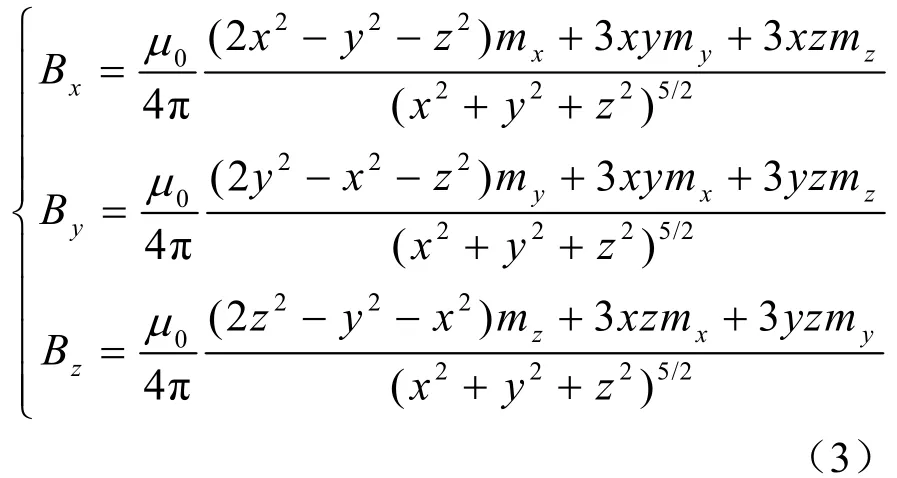
其中,x、y、z为磁探仪运动坐标系中目标所处的方位坐标,即在磁探仪运动坐标系下探头与目标在三轴上的距离。根据以上数学模型,设定各个参数,即可得在任意探测方位下、磁矩处于任意方位的模拟目标磁异常信号。
2 数据分析
2.1 仿真数据分析
实际试验中采用的模拟目标由多片永磁体构成,其磁矩大小和方向均为定值,根据以上建立的数学模型,假设目标磁矩大小为470 A·m2,当地地磁总场为55 500 nT,地磁倾角为60°,设定目标磁矩所处的方位以及磁探仪探测运动方位即可得到不同特征的磁异常信号。由于实际开展试验时,受试验场地限制,因此仿真时主要考虑磁探仪探测方向为正东和正西时的情形。目标正横通过探头时,目标与探头之间正横距离为60 m。
磁探仪探测方向均为正东(90°)和正西(270°),目标磁矩方向分别为正北(0°)、正东(90°)、东南(135°)、垂直向上等所得到的目标磁场信号见图2~图6。
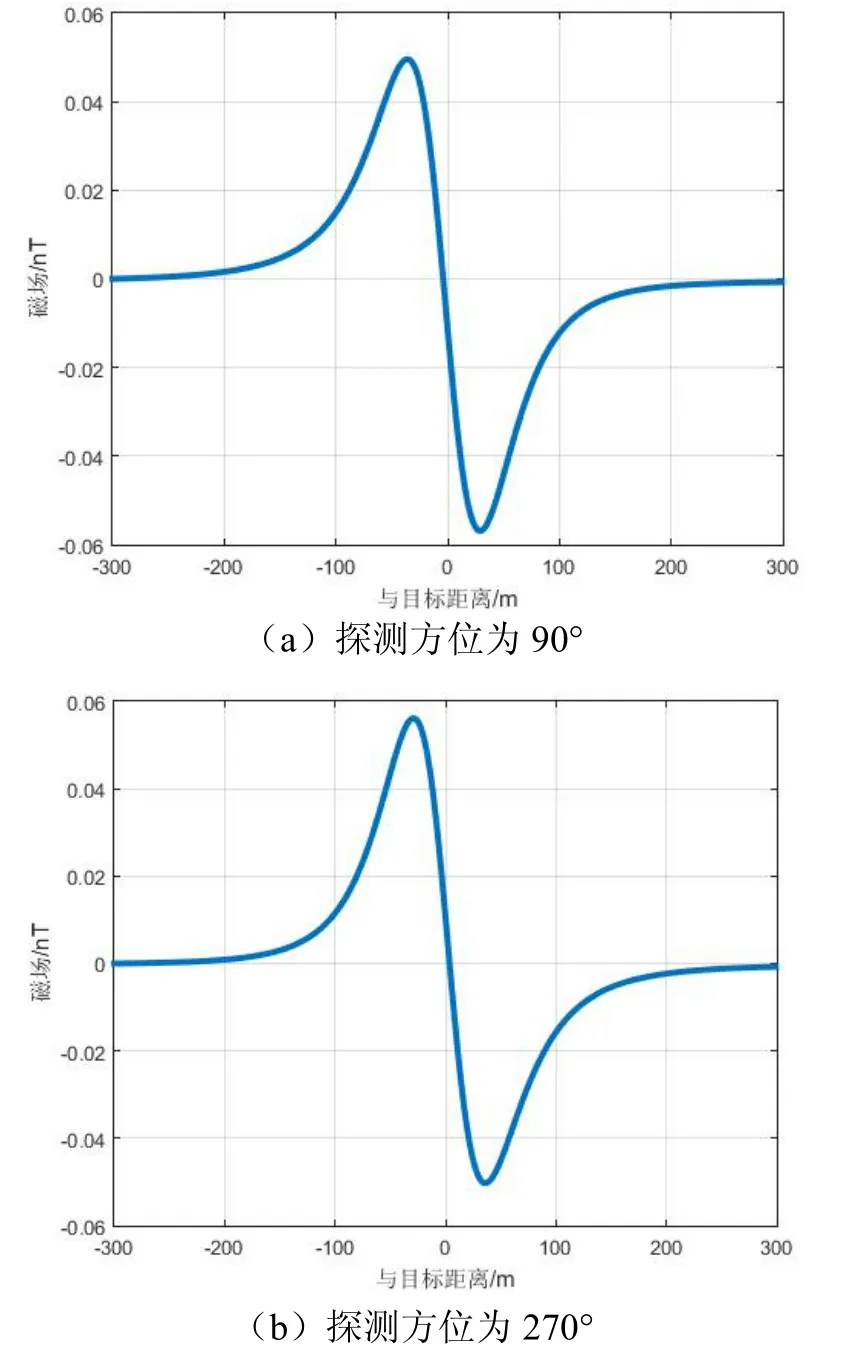
图2 磁矩方位为0°时的目标磁异常信号


图3 磁矩方位为45°时的目标磁异常信号

图4 磁矩方位为90°时的目标磁异常信号
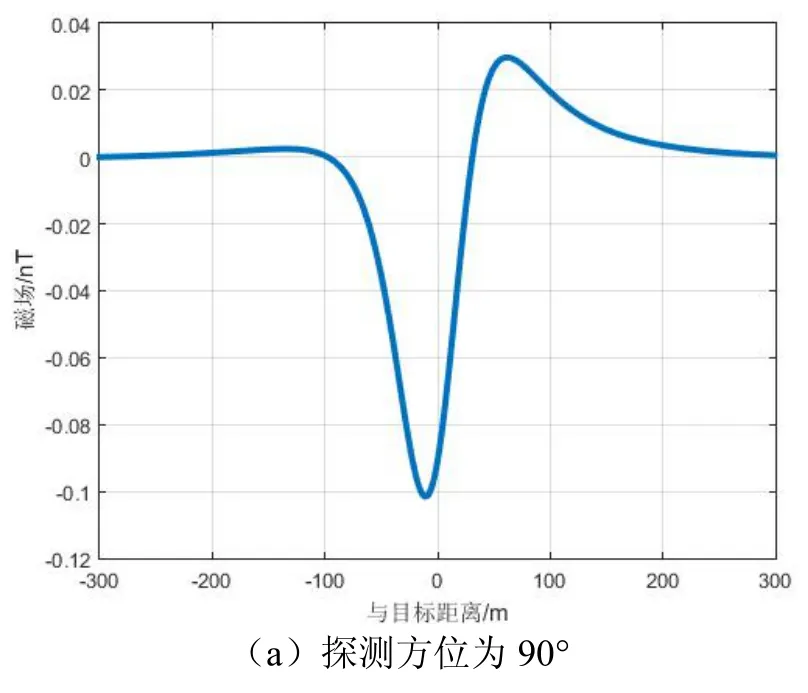
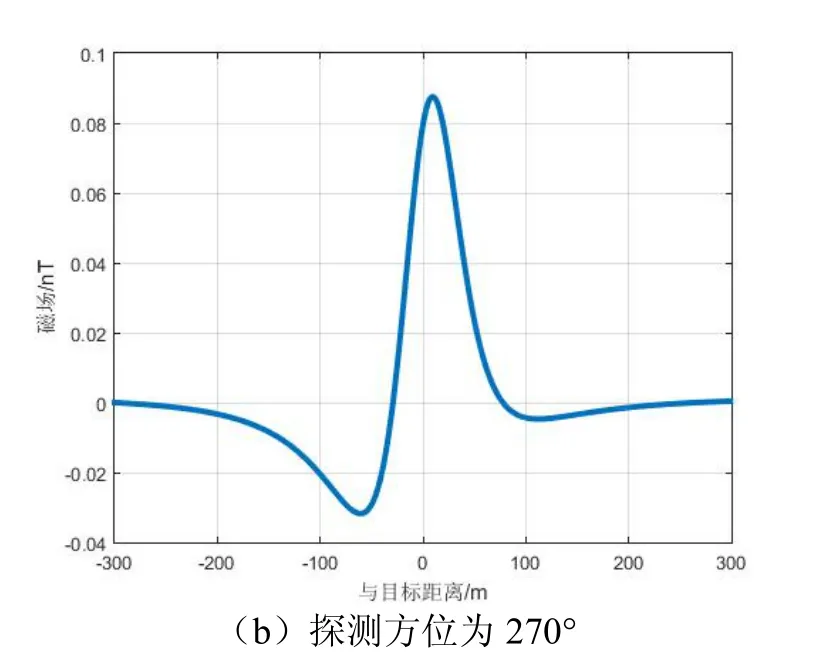
图5 磁矩方位为135°时的目标磁异常信号

图6 磁矩方位垂直向上时的目标磁异常信号
由于篇幅原因,只列举上述仿真结果。根据仿真得到的结果,可以总结出以下规律:(1)当目标磁矩方向处于任意方向时,磁探仪沿着同一直线对其进行往返探测时,得到的目标磁异常信号特征呈中心对称关系;(2)当磁探仪探测方位固定不变时,目标磁矩方位变化180°所测得的目标磁异常信号也呈中心对称关系;(3)磁探仪从目标正横距离处通过时刻附近,所得的磁异常信号一定出现峰值;(4)若目标处于磁探仪探测线路两侧呈对称关系位置时,磁探仪沿同一方位分别对处于这两个位置的同一目标进行探测,所得到的目标磁异常信号完全相同。因此,若采用单探头对目标进行一次探测所得到的目标磁异常信号特征还不足以对目标进行定位,至少需要经过两次探测,才能对目标进行有效定位。
2.2 实测数据分析
根据以上仿真时设置的磁异常探测场景,开展了模拟目标的探测试验。试验中,采用多片磁片构成被测的模拟目标,其磁矩大小为470 A·m2左右。由于所选磁片磁矩方向垂直于磁片表面,因此在试验过程中可根据需要来调整磁矩的方位。采用的两套磁探仪灵敏度较高,探头具体安装位置如图1所示,固定安装、相距约100 m,以消除地磁日变的影响。参数设置同2.1节,测得的目标磁场信号见图7~图11。

图7 磁矩方位为0°时所探测到的目标信号
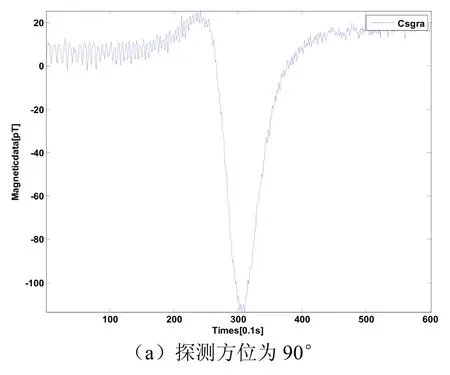
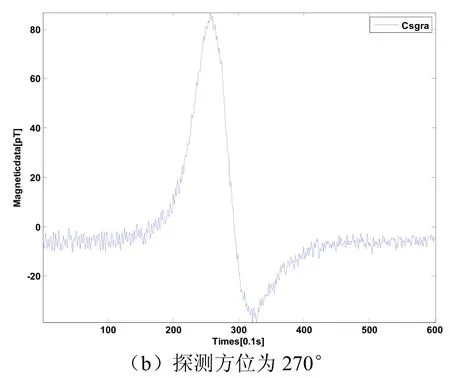
图8 磁矩方位为45°时所探测到的目标信号
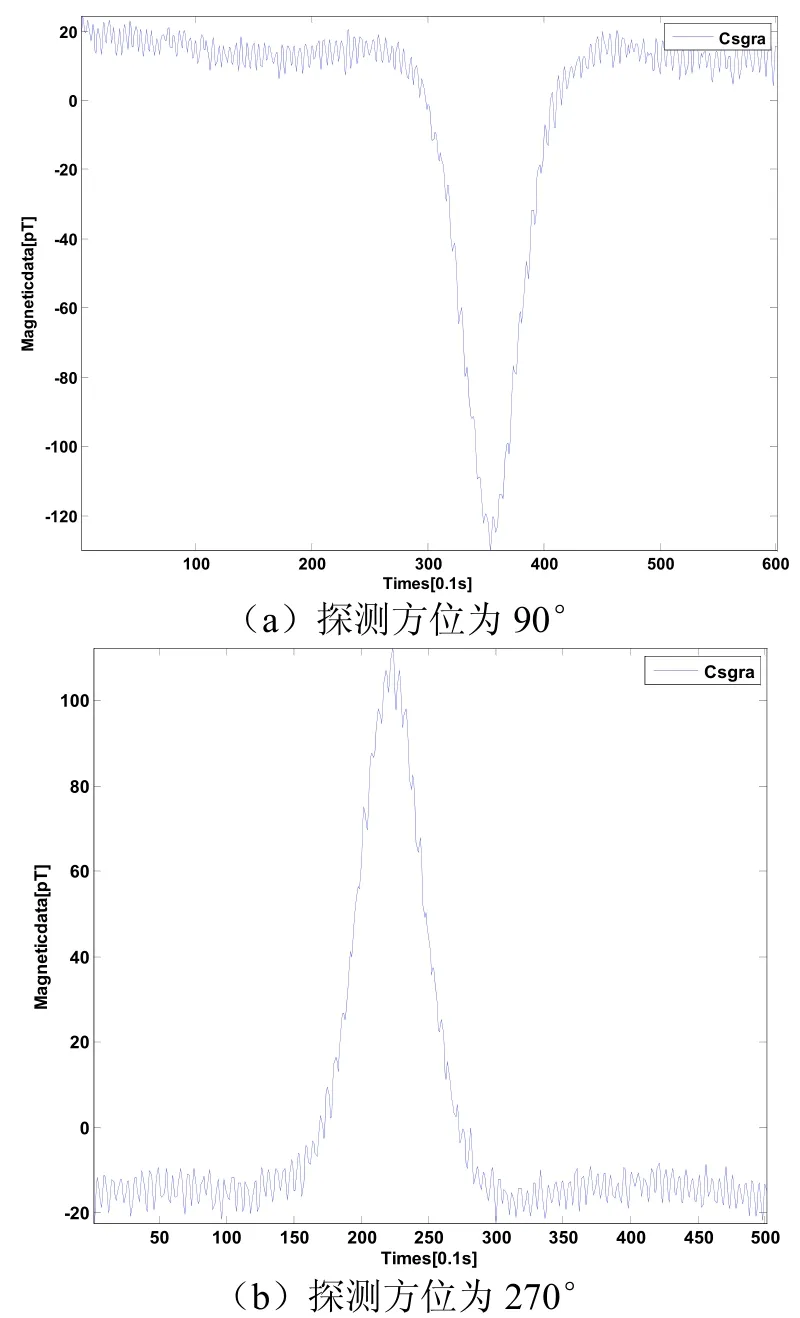
图9 磁矩方位为90°时所探测到的目标信号


图10 磁矩方位为135°时所探测到的目标信号
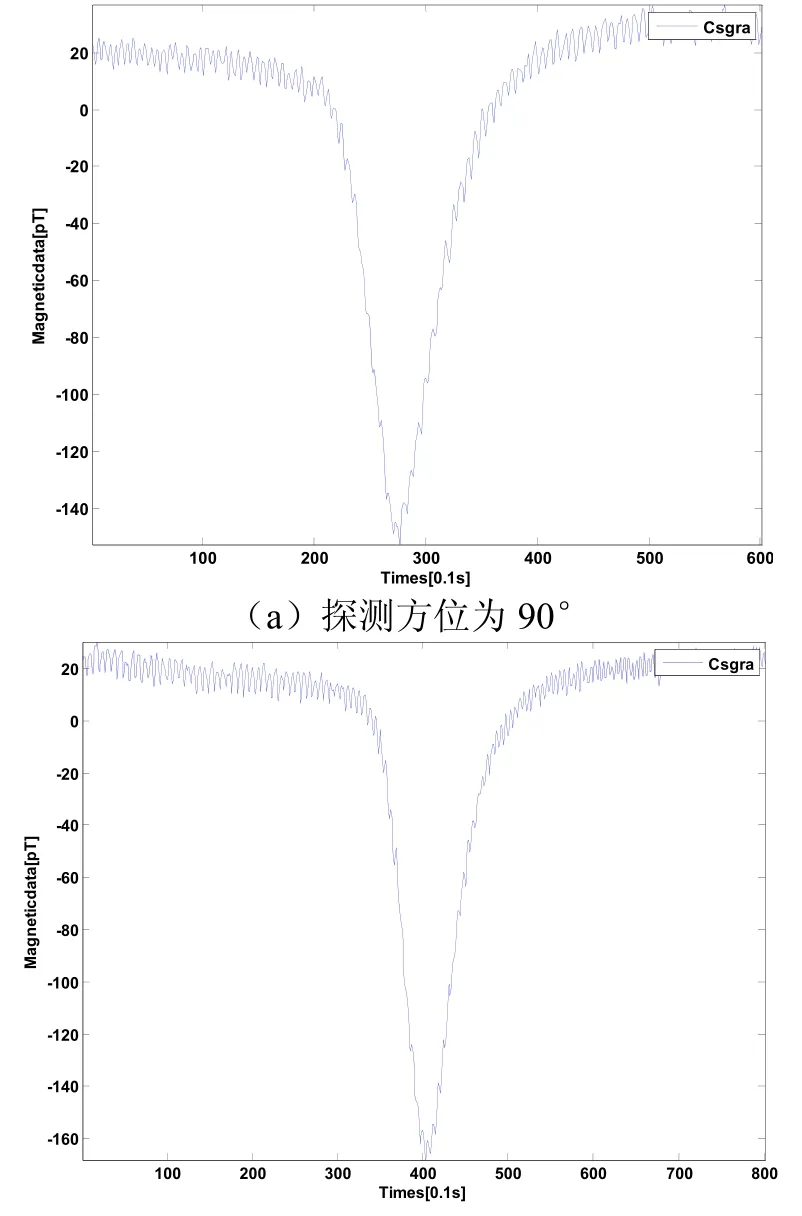
图11 磁矩方位垂直向上时所探测到的目标信号
对比同等条件下获取的仿真数据以及试验探测数据,可以发现,无论是信号特征还是信号幅度均具有极高的相似度,这说明了所采用仿真计算方法的正确性。
3 结论
利用这种仿真计算方法可得到任意条件下的目标磁异常信号特征,建立磁异常信号特征数据库。实际探测时,根据探测方向及目标磁异常特征即可判断出目标可能的方位以及航向。另外,通过对所获取数据的分析,可知单个磁探仪不能一次探测对目标进行定位,可通过二次探测定位。这对实际航空磁探中的探测方式具有一定的参考价值。
参考文献:
[1]孙明太.航空反潜概论[M].北京:国防工业出版社,1998:342-344.
[2]吴芳,杨日杰.航空磁探仪应召搜潜效能研究[J].测试技术学报,2008,22(2):144-147.
[3]王祖典.航空反潜非声探设备[J].电光与控制,2006,13(4):6-8.
[4]王光辉,朱海,郭正东.潜艇磁偶极子近似距离条件分析[J].海军工程大学学报,2008,20(5):60-63.
[5]曲晓慧,杨日杰,单志超.潜艇磁场建模方法的分析与比较[J].舰船科学技术,2011,33(3):7-11.
[6]周耀忠,宋武昌,唐申生.潜艇磁场外推的数学模型研究[J].海军工程大学学报,2003,15(4):31-35.