水声通信网络路由协议研究综述
2017-01-20高涌张宏滔
高涌 张宏滔
(1.中国船舶重工集团公司,北京,100097)
(2.声纳技术重点实验室 第七一五研究所,杭州,310023)
水声通信网络路由协议研究综述
高涌1张宏滔2
(1.中国船舶重工集团公司,北京,100097)
(2.声纳技术重点实验室 第七一五研究所,杭州,310023)
分析了水声通信网络路由协议设计的技术难点,总结了二维静态网络、三维静态网络、移动节点动态网络等典型网络架构中的路由协议研究进展,提出了路由技术研究趋势。文章内容对水声通信网络技术研究及其协议设计具有借鉴和指导意义。
水声通信网络;路由协议;水声信道;综述
水声通信网络,即以水下声波作为信息载体而组成的无线网络。水声通信是水声通信网络的基础,只有当点对点水声通信技术达到一定的实用程度后,水声通信网络才有可能被建立起来。上世纪90年代国外开始出现水声调制解调器,为水声通信网络技术的研究提供了物理基础。目前报道最多、试验水平最高的水声通信网络是的美国的海网(Seaweb)[1]。自1998年开始,Seaweb经过12年的试验,实现了多固定节点的组网、自适应节点路由初始化、潜艇和无人潜航器(UUV)的数据接入、利用固定节点对UUV定位、分簇网络等多种功能,在基于卫星浮标的远海观测网、港口近岸的水下侦察网络等应用中展示了良好的应用效果和技术先进性。目前,水声通信网络技术的研究主要集中在物理层、数据链路层和网络层,其中网络层的主要功能是提供路由协议。
1 路由协议研究进展
网络协设计是面向应用需求的,水声通信网络当前存在三种主要的应用架构:二维静态网络、三维静态网络、移动节点参与的动态网络。下面分别介绍三种网络架构的路由协议研究进展情况。
1.1 二维静态网络路由协议
在二维静态网络中,节点通常被布置在海底,每个节点的数据在水平链路上以直接或多跳的方式到达一个汇集节点。针对这种二维静态网络,文献[2]提出一种先验式水声网络路由协议(如图1所示)。在路由初始化阶段,主节点(网关浮标节点)广播路由探查信号,第一次收到探查信号的节点将自己的地址识别号(ID)添加到探查信号内后继续广播,当网络最外围的节点收到探查信号后,一个应答信号被原路返回到主节点,这样一颗根节点为主节点的路由树被建立起来。这是一种依靠主节点的集中式路由协议,在路由发现的过程中需要进行大量的数据交换,受限于通信链路的单向性,它只适合于数据流汇聚到主节点的静态网络,不适合移动节点网络和大规模网络。类似的网络协议参见文献[3,4],其中文献[3]提出的“宽度优先”和“深度优先”两种路由搜索机制在2008年Seaweb海试中得到了测试,成功建立起水下19个节点与海面网关节点之间的路由。

图1 拓扑发现过程
文献[5]提出一种基于路由矢量的数据转发协议(Vector-based forwarding,VBF),这是一种基于地理位置信息的路由协议。所谓“路由矢量”是指从源节点到目的节点之间的传输路径,如图 2所示。源节点s0到目的节点s1之间的传输路径可以看作是一个虚拟的“管道”。源节点发送的数据包中包含了s0和s1的位置信息,中间节点收到数据包后,计算出自身相对于“管道”的位置,越接近“管道”的节点转发数据的优先级越高。该协议要求网络节点具有自身定位能力。
文献[6]在VBF的基础上提出了一种逐跳式矢量转发路由协议(Hop by Hop-VBF),主要针对VBF协议存在的两个问题进行了改进。问题一是数据包在源节点和目的节点之间转发的过程中,中间节点只计算一个虚拟“管道”,这在节点非常稀疏的情况下,虚拟“管道”内的节点可能很少,数据包被成功转发到目的节点的概率就会很低;问题二是VBF协议对虚拟“管道”的半径很敏感,实际应用中很难确定“管道”的半径。作者提出一种根据邻节点和目的节点位置逐跳建立虚拟“管道”的方法,在很大程度上解决了以上两个问题。

图2 基于矢量的转发路由协议示意图
文献[7]提出一种聚焦波束路由协议(Focused Beam Routing,FBR),以最小化每比特能量为目标,采用跨层设计方法,在选择下一跳节点时综合考虑了介质介入控制层(MAC)和物理层信息进行协议优化。如图 3所示,源节点A要将数据发送至目的节点B,节点A先以最小的功率发射请求信号(RTS),邻节点收到RTS后,根据RTS中携带的节点A和B的位置信息计算出自身是否在开角θ内,如果是,就返回应答信号(CTS);如果节点A没有收到任何CTS,则逐步加大发射功率;如果节点A收到多个CTS信号,则选择距离目的节点B最近的节点作为下一跳节点;以此类推,最后将数据包送达目的节点B。

图3 聚焦波束路由协议
1.2 三维静态网络路由协议
三维网络就是通过调整节点的深度,使网络中的多个节点位于不同深度,使之具备在一定区域、不同深度的三维范围获取和传输信息的水下信息网络。文献[8]针对三维水声通信网络中延迟敏感和不敏感两种网络应用情况分别提出了两种路由协议。对于延迟敏感的应用,作者提出了一种基于虚电路技术的集中式路由协议,主节点(网关浮标节点)根据收集到的网络拓扑信息,综合延时、能耗、可靠性等因素,计算出一条最优的主干路径和几条备份路径,备份路径能够保证部分节点失效时网络的联通性。对于延迟不敏感的应用,作者提出了一种分布式路由协议,它允许每个节点在时变信道条件下依据能量消耗最小准则自主决定下一跳节点。
文献[9]提出一种基于深度信息的路由协议(depth‐based routing,DBR),该协议异于之前的基于完全地理位置信息的路由协议,只需要节点配置深度传感器,避免了复杂的定位技术。如图4所示,数据流总是汇聚到海面浮标节点(可以有多个海面浮标节点),任何比前一跳节点更浅的节都有可能成为潜在的下一跳中继节点。协议采用了一种冗余包抑制技术来减少重复的数据包,当潜在的下一跳节点(可能有多个)收到数据包(含有前一跳的深度信息)后,总是先延迟一定时间才转发,延迟的时间与自身深度和前一跳深度之差成反比,这样越接近海面的节点作为下一跳节点的优先级就越高。

图4 基于深度信息路由协议的三维水声网络
文献[10]提出一种无须任何位置信息(包括深度信息)的逐跳-动态地址路由协议(HH-DAB)。由海面浮标节点广播的Hello包在网络中向着海底逐跳转发,使分布在不同深度的节点获得其距离海面的跳数,信息数据包总是向着跳数小的节点转发。网中节点存在两种类型的地址:海面浮标节点和锚系在海底的节点具有静态地址(HopID),悬浮中不同深度的传感器节点具有动态地址(HopID)。HopID就是传感器节点距离海面浮标节点的跳数。该协议具有很高的数据包传输成功率。
文献[11]针对三维稀疏水声通信网络设计一种自适应路由协议(AR),该协议能够根据数据包的优先级,通过信息冗余和资源调度方法实现数据包传输成功率、网络延时、能耗等性能的折中。在路由过程中每个节点需要完成三个步骤:①邻居发现:周期性广播Hello包进行邻居发现,在Hello包中捎带确认信号(ACK)以减少相同数据包的泛洪数量;②优先级计算:根据数据包的紧急程度、数据包产生时间、节点密度、节点剩余电量计算数据包的优先级;③路由确定:根据优先级的高低,数据包被投递到一个指向目的节点的事先设定的区域,优先级越高,投递区域越大,如图5所示。

图5 自适应路由协议的路由确定示意图
1.3 移动节点动态网络路由协议
当移动节点应用于水下网络时,与单纯的水下固定网络相比,不仅提高了网络的自适应能力,还可以扩展网络的覆盖范围,提高网络的灵活性。文献[12]报道,美国针对多UUV系统的两种不同应用模式,分别开展了两项水声网络研究项目:受控泛洪小型网络(COFSNet)和自动水下系统网络(AUSNet),分别测试了两种自组织、自维护路由协议,前者使用了泛洪路由协议,适用于短时、非频繁通信;后者将航位推算(Dead-Reckoning)技术融入动态源(DSR)路由协议,减少了路由开销,适用于长时、频繁通信。
文献[13]提出一种基于区块划分并联合目的节点位置预测技术的路由协议(SBR-DLP), 适用于目的节点是移动节点的应用场合。该采用逐跳路由搜索方式,如图 6所示,源节点S的周围被划分成不同的区块(sector),当源节点S有数据要发送至移动节点D时,源节点S先广播路由询问消息,收到询问消息的邻节点,根据源节点位置、自身的位置、以及移动节点的预测位置作出判断,如果自己相比源节点更接近移动节点,则向源节点发送应答消息告知源节点自身可以作为潜在的下一跳节点。该协议基于这样的假设:移动节点的运动轨迹被事先告知所有的节点,它的位置可以被其它节点预测。
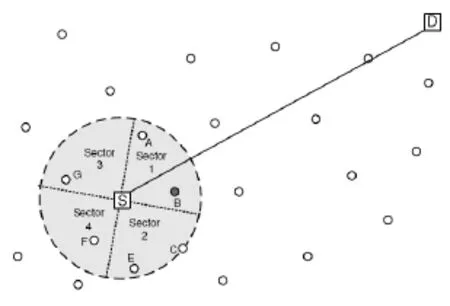
图6 分块式目的节点位置预测路由协议示意图
文献[14]提出一种使用UUV节点作为中继节点的水下传感器网络数据收集方法。网络由分布在海底的固定节点和若干移动节点组成,移动节点在网络中随机游走,并周期性地发送广播信号以唤醒处于休眠状态的传感器节点,当移动节点进入某个传感器节点的一跳通信范围内时,传感器节点将保存在本地的信息数据发送至移动节点,当移动节点返回海面时,再将信息数据转发到海面浮标节点。该协议可以降低传感器节点的发射功率,提高传感器节点的寿命。
文献[15]提出一种利用UUV节点来收集漂流传感器节点数据的方法。网络中所有的传感器节点随机漂浮在不同深度,这些随流漂移的传感器节点的数据能被一条设定运动轨迹的UUV收集。为了节省传感器节点的能量,传感器节点平时处于休眠状态,路由协议要解决的问题是:收集UUV当前所在区域内传感器的数据,及时唤醒UUV所要经过的下一个区域的传感器节点,避免出现传感器节点“空洞”。
2 技术难点与发展趋势
2.1 面临挑战
水声信道与陆上电磁波信道相比,存在传播速度慢、通信率低、易受环境影响、单向路径严重、能耗高等不利因素,使得设计水声通信网络路由协议时面临许多挑战,主要包括:
(1)声波在水中的传播速度与电磁波相比慢了5个数量级,导致很高的传播延迟。
(2)受可用带宽的限制,水声通信的速率远低于电磁波通信,要尽量节省路由建立与维护所需的信息开销。
(3)受海洋信道时变特性、干扰噪声时变特性、节点移动等复杂因素的影响,一般来说水声通信链路的可靠性远低于电磁波信道。
(4)水声信道存在严重的单向传输特性,网络中某些靠近岸边或海底斜坡的节点会因为存在较强的反射路径而导致较低的接收成功率,而处于开阔区域的节点,接收成功率则较高,这种单向传输特性会导致路由的不平衡性。
(5)水声通信所需的能量高于陆上电磁波通信,提高能量利用率是路由协议设计需要考虑的关键因素之一[16]。
2.2 技术发展趋势
应该指出的是,在众多水声网络路由协议的研究文献中只有少数协议在真实海洋环境中得到试验验证,其余的大都只停留在仿真阶段,这与现实中水声通信网络的试验规模有关[17]。由于通信能力、通信效率、能耗等因素以及一些非技术因素(水声网络试验费用高昂),导致目前水声通信网络难以规模化应用。因为网络规模越大,覆盖范围越大,节点越多,通信中的延时也越大,导致整体网络的性能降低,能量消耗加剧,进一步缩短了网络的寿命。尽管这样,作为学术研究,水声通信网络路由技术研究呈现出以下主要趋势:
(1)集中式协议向分布式协议方向发展。早期的Seaweb网络采用网关节点控制的集中式路由协议,发展到COFSNet(Controlled Flooding for Small Networks)、AUSNet(Autonomous Undersea Systems Network)等网络的分布式路由协议。
(2)路由建立过程中充分利用节点位置信息。利用定位技术、航位推算技术获得节点的位置信息,或者在三维网络中利用节点深度信息,可以减少路由搜索范围,显著提高路由搜索效率。
(3)支持移动性。随着UUV等移动节点的大量使用,需要解决快变动态拓扑下的路由问题,这对于高延时、高中断率的移动水声网络将是一个重要挑战。
(4)发展容错性设计方法。对于由节点失效、移动、单向链路等因素导致的路由失效问题,基于多路径路由的容错性设计,可较好地提高传输链路的可靠性。
(5)发展跨层优化设计方法。在带宽和能量资源严重受限的水声网络中,联合MAC层、物理层等信息进行路由协议的优化设计,可有效地提高延时、投递成功率、能耗等综合性能。
(6)发展安全路由技术。由水声网络的开放特征和广播特征引起的信息安全问题将会是水声网络应用的一个障碍。安全路由将是未来研究的一个方向。
3 结论
本文给出了现有水声通信网络路由协议的研究现状,分析了路由技术面临的挑战,并重点描述了几种最具代表性的协议。尽管这些路由协议中的绝大多数最初都起源于陆上无线电网络,但经过适应性修改后被赋予水声特点,能够应用到水声环境,最后分析了水声网络路由技术研究趋势。
[1]SOZER E M,STOJANOVIC M,PROAKIS J G.Underwater acoustic networks[J].IEEE Journal of Oceanic Engineering,2000,25(1):72-83.
[2]XIE G G,GIBSON J H.A network layer protocol for UANs to address propagation delay induced performance limitations[C].Proc.of MTS/IEEE OCEANS,2001:2087-2094.
[3]CHEE WEI ONG.A discovery process for initializing ad hoc underwater acoustic networks[D].Naval Postgraduate School,2008.
[4]HELGE RUSTAD.A lightweight protocol suite for underwater communication[C].In Proc.2009 Int.Conf.On Advanced Information Networking and Applications (Workshops),2009:1172-1177.
[5]XIE P,CUI J H,LAO L.VBF:Vector-based forwarding protocol for underwater sensor networks[J].In Proc.of IFIP Networking,2005.
[6]NICOLAOU N,SEE A,CUI J H,et al.Improving the robustness of location-based routing for underwater sensor networks[C].In Proc.Of MTS/IEEE OCEANS.IEEE,2007.
[7]JORNET J M,STOJANOVIC M,ZORZI M.On joint frequency and power allocation in a crosslayer protocol forunderwater acoustic networks[J].IEEE J.Oceanic Engineering,2010,35(4):936-947.
[8]POMPILI D,MELODIA T.Three-dimensional routing in underwater acoustic sensornetworks[C].In Proc.of ACM PE-WASUN,Montreal,QC,Canada,October 2005.
[9]YAN H,SHI Z,CUI J H.DBR:depth-based routing for underwater sensor networks[C].In Proc.of IFIP Networking’08,2008.
[10]AYAZ M,AZWEEN ABDULLAH.Hop-by-hop hop dynamic addressing based (H2-DAB) routing protocol for underwater wireless sensor networks[C].IEEE international conference on Information and Multimedia Technology ICIMT,2009:436-441.
[11]GUO ZHEN,COLOMBI GIOELE,WANG BING,et al.adaptive routing in underwater delay/disruption tolerant sensor networks[C].Fifth Annual Conference on Wireless on Demand Network Systems WONS ,2008:31-39.
[12]CHARLES BENTON,JAMES KENNEY,ROBERT NITZEL,et al.Autonomous undersea systems network (AUSNet)-protocols to support ad-hoc UUV communications.Autonomous Underwater Vehicles,2004 IEEE/OES,2004,83-87.
[13]CHIRDCHOO N,SOH W S,CHUA K C.Sector-based routing with destination location prediction for underwater mobile networks’[C].IEEE Int.Conf.Advanced Information Networking and Applications Workshops,2009:1148-1153.
[14]MAGISTRETTI E,KONG J,LEE U,et al.A mobile delay-tolerant approach to long-term energy-efficient underwater sensor networking[C].Proc.IEEE Int.Conf.Wireless Communications and Networking Conference,2007:2866-2871.
[15]CHEN YUH-SHYAN,LIN YUN-WEI.Mobicast routing protocol for underwater sensor networks[J].IEEE Sensors Journal,2011,13(2):510-515.
[16]IAN F AKYILDIZ,DARIO POMPILI,TOMMASO MELODIA.Underwater acoustic sensor networks:research challenges[J].Ad Hoc Networks,2005,3(3):257-279.
[17]KASHIF ALI .Underwater wireless hybrid sensor networks,computers and communications[C].IEEE Symposium on ISCC,2008:1166-1171.
